Вертолетный автопилот
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки





Текст
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК А 1 70 Ы 1)5 В 64 С 13/ ТЕНТНО ГОСУДАРСТВЕННОЕ 1 ВЕДОМСТВО СССР (ГОСПАТЕНТ СССР) ОПИСАНИЕ ИЗОБРЕТЕНИЯ У АВТОРСКОМУ СВИДЕТЕЛ 1) 4846200/22 2) 02.07.90 6) 30,08.93. Бюл. М 32 1) Конструкторское бюро промышленной втоматики 2) Б.В.Грицюк и Ю.А.фе 6) Техническое описа А 1.600,000 ТО, с,23, прил 4) ВЕРТОЛЕТНЫЙ АВТ 7) Изобретение относит авления и стабилизации ия летательных аппарат спользовано в качестве ета. Цель изобретения ежности путем исключеФ доровние САУ-В 24-1, ожение 1, 1977. ОПИЛОТся к системам упуглового положеов и может быть автопилота верто - повышение нания механической системы механизма согласования и точности управления. Вертолетный, автопилот содержит датчик угла отклонения объекта 1, компенсационный датчик 2, формирователь 3 сигнала угла отклонения объекта 1, ком- . пенсационный датчик 2, формирователь 3 сигнала отклонения объекта, формирователь 4 управляющих импульсов, связанный с управляющим входом устройства выборки и хранения 8, дифференцирующее звено 9, компенсационный датчик 2, связанный через сумматор 11 с сервоприводом 12, выход которого является выходом автопилота, логический 5 элемент И, два ключа 6, 10. 1 з.п. ф-лы,.2 ил.Изобретение относится к системам управления и стабилизации углового положения летательных аппаратов и может быть использовано в качестве автопилота вертолета,Цель изобретения - повышение надежности путем исключения механической системы механизма согласования и точности управления.На фиг, 1 представлена структурная схема вертолетного автопилота;на фиг.2- структурная схема формирователя сигнала угла отклонения объекта.Вертолетный автопилот (см. фиг. 1) содержит датчик угла отклонения объекта 1, компенсационный датчик 2, формирователь 3 сигнала угла отклонения объекта, формирователь 4 управляющих импульсов, первый логический элемент И 5, первый ключ 6, общая шина 7, устройство выборки и хранения 8, дифференцирующее звено 9, второй 10 ключ, сумматор 11, сервопривод органа управления 12, выход которого является выходом автопилота, Формирователь сигналов угла отклонения объекта 3 (фиг. 2) имеет демодуляторы 13 и 14, источник опорного напряжения 15, первый и второй ключи 16 и 17, первый и второй аналого-цифровые преобразователи 18 и 19, имеющие опорные входы 20, аналоговые входы 21, входы "Запуск" 22, аналоговые выходы 23 и выходы "Конец преобразования" 24, второй и первый логические элементы И 25 и 26, логический элемент ИЛИ 27, сумматор 28. Автопилот работает следующим обра- зом.Датчик угла 1 выдает сигнал положения объекта в пространстве в виде двух напряжений переменного тока, модулированного по амплитуде в функции синуса и косинуса угла отклонения. На демподуляторах 13 и 14 производится выпрямление этих сигналов с учетом фазы напряжения питания угла 1. Демодуляторы 13 и 14 представляют собой фазочувствительные выпрямители. Сигналы с демодуляторов 13 и 14 поступают на аналоговые входы 21 соответственно первого 18 и второго 19 аналого-цифровых преобразователей и на замыкающие контакты соответствественно второго 17 и первого 16 ключей. При отсутствии сигнала на управляющем входе ключей 16 и 17 на опорные входы 20 аналого-цифровых преобразователей 18 и 19 поступает опорное напряжение с источника опорного напряжения 15 через замыкающие контакты ключей 16 и 17, Автопилот работает в режимах "Управление" и "Стабилизация". В режиме "Управление" на втором выходе блока 4 формируются импульсы заданной частоты. С второго выхода формирователя управляющих импульсов 4 последовательность импульсов поступает на входы 22 "Запуск" аналого-цифровых 5 преобразователей 18 и 19 и на вход первогологического элемента И 25. С третьего выхода формирователя управляющих импульсов 4 на вход устройства выборки и хранения 8 поступают короткие импульсы, исчезающие 10 одновременно с импульсами на втором выходе формирователя управляющих импульсов 4, на первом выходе которого в режиме "Управление" - логический нуль, При поступлении импульса на входы 22 аналого цифровых преобразователей 18 и 19 (попереднему фронту импульса) начинается процесс преобразования сигналов, поступающих с демодуляторов 13 и 14, пропорционально соответственно зи а,сов а, 20 относительно напряжения источника опорного напряжения 15 в цифровую форму и последующим их запоминанием, При этом запоминаются значения з и а и сов а, имевшие место в момент окончания преобразования, Поскольку время преобразования.Поскольку время преобразования весьма мало (не более 120 мксек), значения сигналов с демодуляторов 13 и 14 практически не успев а ют измен иться (угол остается и реж ним), По окончании преобразования с выходов 24 "Конец преобразования" аналого-цифровых преобразователей 18 и 19 выдаются сигналы в виде импульсов, поступающих на первый и второй входы первого логического элемента И 28, При совпадении этих импульсов на его выходе формируется импульс, который, пройдя логический элемент ИЛИ 27, поступит на второй вход второго логического элемента И 25, 40 на первом входе которого в это время будетприсутствовать импульс с второго выхода формирователя управляющих импульсов 4, Второй логический элемент И 25 выдает на своем выходе логическую единицу, которая 45. заблокирует выход логического элементаИЛИ 27 в единичном состоянии при исчезновении сигналов с выходов 24 "Конец преобразования" аналого-цифровых преобразователей 18 и 19, Сигнал с выхода 50 логического элемента ИЛИ 27 произведетпереключение ключей 16 и 17. в результате чего опорный вход 20 первого аналого-цифрового преобразователя 18 будет переключен с выхода источника опорного напряжения 15 на выход демодулятора 14, а опорный вход 20 второго аналого-цифрового преобразователя 19 - . с выхода источника опорного напряжения 15 на выход демодулятора 13. С этого момента аналого-цифро 1837033ые преобразователи 18,19 будут выполнять ункции умножающего цифро-аналогового реобрвзователя и на их выходах сформируотся сигналы соответственно фз асоз . (а + Ь а) и соз аМп (а + Ла); где Ьа - 5 угловое рассогласование, В результате вычитания на выходе сумматора 28 сформируется сигнал: за Ла = з 1 п а. соз(а + Ьа)- - соза з 1 п (а+Ьа), 10 Этот сигнал поступает наинформационный ход устройства выборки и хранения 8, На правляющий вход устройства выборки и ранения 8 поступит импульс с третьего выода формирователя управляющих импуль сов. Величина приращения сигнала нэ ыходе сумматора 28 проходит через устойство выборки и хранения 8 и через разыкающие контакты ключа 10 на второй ход сумматора 11 и затем при пропадании 20 мпульса на управляющем входе устройста выборки и хранения 8 запоминается до рихода следующего импульса. Первый ход сумматора 11 в это время связан с бщей шиной 7. Одновременно пропадает и 25 мпульс с выхода второго формирователя ,правляющих импульсов 4, в результате чео ключи 1 б и 17 возвращаются в исходное оложение. С приходом нового импульса процесс повторяется. На втором входе 30умматора 11 с устройства выборки и хранения 8 будет формироваться сигнал в виде некоторой последовательности ступенек в лучае наличия скорости изменения сигнаов с датчика угла 1, т.е. угловой скорости 35 ращения объекта, Если скорость вращения бъекта постоянная, то на втором входе сумматора 11 будет поддерживаться один и тот се .уровень сигнала, поскольку величина приращения выходного сигнала за один и 40 тот же промежуток времени будет постоянной. При достаточной частоте замеров велиины приращений выходной сигнал устройства выборки и хранения 8 будет пропорционален угловой скорости объекта, по кольку перед каждым замером происходит бнуление сигнала на выходе сумматора 28 и иксация приращений осуществляется в лиейной зоне синусной характеристики. Таим образом, в режиме "Управление" на 50 вход сервопривода 12 поступает сумма сигналов угловой скорости объекта и компенсационного датчика 2. В режиме ":Стабилизация" с первого и второго выхоров формирователя управляющих импуль Сов 4 выдается. постоянное напряжениев иде логической единицы, на третьем выход 1 е - .формируется логический нуль, По переднему фронту импульса, поступившего на вход 22 "Запуск" обоих аналого-цифровых преобразователей 18 и 19 при включении режима "Стабилизация" начинается процесс преобразования и запоминания сигналов, аналогично как в режиме "Управления".По окончании преобразования с выхода логического элемента ИЛИ 27 на вход логического элемента И 5 поступит сигнал у виде логической единицы, на втором входе которого уже будет присутствовать напряжение с первого выхода формирователя управляющих импульсов 4. Сигнал с выхода логического элемента И 5 переключит ключ б с общей шины 7.и подключит выход сумматора 28 к входу дифференцирующего звена 9 и первому входу сумматора 11, В это же время второй вход сумматора 11 будет отключен от выхода устройства выборки и хранения 8 и подключен к выходу дифференцирующего звена 9 с помощью второго ключа, на управляющий вход которого поступит сигнал с первого выхода формирователя управляющих импульсов 4. С этого момента сигнал, пропорциональный зи Ла, сформированный на выходе сумматора 28, через замыкающие контакты ключа б поступает на первый вход сумматора 1.1, а через дифференцирующее звено 9 и замыкающие контакты ключа 10 - на второй вход сумматора 11. Таким образом, в режиме "Стабилизация" на вход сервопривода 12 поступает сумма сигналов, пропорциональных отклонению объекта от заданного положения (Ьа) и угловой скорости (Ла) объекта, обеспечивающих стабилизацию углового положения объекта и парирование коротко-периодических возмущений. Сигнал компенсационного датчика 2, поступающий через сумматор 11 на сервопривод.12, обеспечивает компенсацию сигнала, пропорци-, онального углу отклонения объекта при вмешательстве пилота в управление. Техническйе преимущества заявляемого устройства по сравнению с прототипом позволяют повысить надежность автопилота, повысить точность формированйя сигнала угловой скорости, что делает возможным улучшить управление объекта.Формула изобретения1, Вертолетный автопилот, содержащий датчик угла отклонения летательного аппарата, компенсационный датчик, дифференцирующее звено, последовательно соединенные сумматор и сервопривод органа управления, о т л и ч а ю щ и й с я тем, что, с целью повышения надежности и точности управления, в него дополнительно введены формирователь сигнала угла отклонения летательного аппарата, первый и вто 1837033рой входы которого соединены соответственно с первым и вторым выходами датчика угла отклонения летательного аппарата по сигналам синуса и косинуса угла, и устройство выборки и хранения, первый и второй 5 ключи, последовательно соединенные формирователь управляющих импульсов, второй выход которого соединен с третьим входом формирователя сигнала угла отклонения летательного аппарата, третий выход 10 - суправляющим входом устройства выборки и хранения, и логический элемент И, второй вход которого соединен с вторым выходом формирователя сигнала угла отклонейия летательного аппарата, а выход - с 15 управляющим входом первого ключа, первый выход формирователя сигнала угла от-. клонения летательного аппарата соединен с входом дифференцирующего звена и первым входом сумматора через замыкающие 20 контакты первого ключа, размыкающий контакт которого соединен с общей шиной питания, выход дифференцирующего звена соединен с вторым входом сумматора через замыкающие контакты второго ключа, раз мыкающий контакт которого соеДинен с выходом устройства выборки и хранения, а управляющий вход - с первым выходом формирователя управляющих импульсов, выход компенсационного датчика соеДинен с 30 третьим входом сумматора,2. Автопилот по п.1, отл и ча ю щи йс я тем, что формирователь сигнала угла отклонейия летательного аппарата выполнен в виде последовательно соединенных 35 первого демодулятора, первого аналогоцифрового преобразователя и сумматора, выход которого является первым выходом формирователя сигнала угла отклонения летательного аппарата, последовательно соединенных первого логического элемента И и логического элемента ИЛИ, выход которого является вторым выходом формирователя сигнала угла отклонения летательного аппарата, последовательно соединенных второго демодулятора и второго аналогоцифрового преобразователя, выход которо. го соединен с вторым инверсным входом сумматора,.первого и второго ключей, источника опорного напряжения, выход которого соединен с опорными входамй первого и второго аналого-цифровых преобразователей соответственно через размыкающие контакты первого и второго ключей, второго логического элемента И, первый вход которого соединен с входами "Запуск" первого и второго аналого-цифровых преобразователей и является третьим входом формирователя сигнала угла отклонения летательного аппарата, второй вход - соединен с выходом логического элемента ИЛИ и управляющими входами первого и второго ключей, а выход - с вторым входом логического элементаИЛИ, выход первого демодулятора соединен с замыкающим контактом второго ключа, выход второго демодулятора - с замыкающим контактом первого ключа, вторые выходы первого и второго аналогоцифровых преобразователей по сигналу "Конец преобразования" соединены соответственно с первым и вторым входами первого логического элемента И, входы первого и второго демодуляторов являются соответственно первым и вторым входами формирователя сигнала угла отклонения летательного аппарата.,Петраш орре Заказ 2853 Тираж. Подписное ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ ССС 113035, Москва, Ж, Раушская наб., 415 издательский комбинат "Патент", г, Ужгород, ул,Гагарина, 101 Производств оставителехред М,М Т.Туманоргентал
СмотретьЗаявка
4846200, 02.07.1990
КОНСТРУКТОРСКОЕ БЮРО ПРОМЫШЛЕННОЙ АВТОМАТИКИ
ГРИЦЮК БОРИС ВАСИЛЬЕВИЧ, ФЕДОРОВ ЮРИЙ АЛЕКСАНДРОВИЧ
МПК / Метки
МПК: B64C 13/18
Метки: автопилот, вертолетный
Опубликовано: 30.08.1993
Код ссылки
<a href="https://patents.su/5-1837033-vertoletnyjj-avtopilot.html" target="_blank" rel="follow" title="База патентов СССР">Вертолетный автопилот</a>
Вторичный источник постоянного напряжения с защитой

Номер патента: 1056160
Опубликовано: 23.11.1983
МПК: G05F 1/58
Метки: вторичный, защитой, источник, постоянного
...выводов, а егосиловые выходы подключены к входамсилового преобразователя с трансформатором, к вторичной обмотке которого подключен высокочастотный выпрямитель с Ю -Фильтром, один иэ силовых выходов которого подключен к одному из выходных выводов, а другойподключен к силовому входу датчикатока, соединенного силовым выходомс другим выходным выводом, усилительрассогласования, подключенный вхоцом к выходному выводу, блок защиты,вход которого подключен к выходу датчика тока, один из выходов - кпервому входу компаратора, блока управления, второй вход компаратораподключен к выходу генератора блока управления, а выход компаратора5 к входу усилителя мощности блока управления, соединенного выходами суправляющими входами силового преобразователя,...
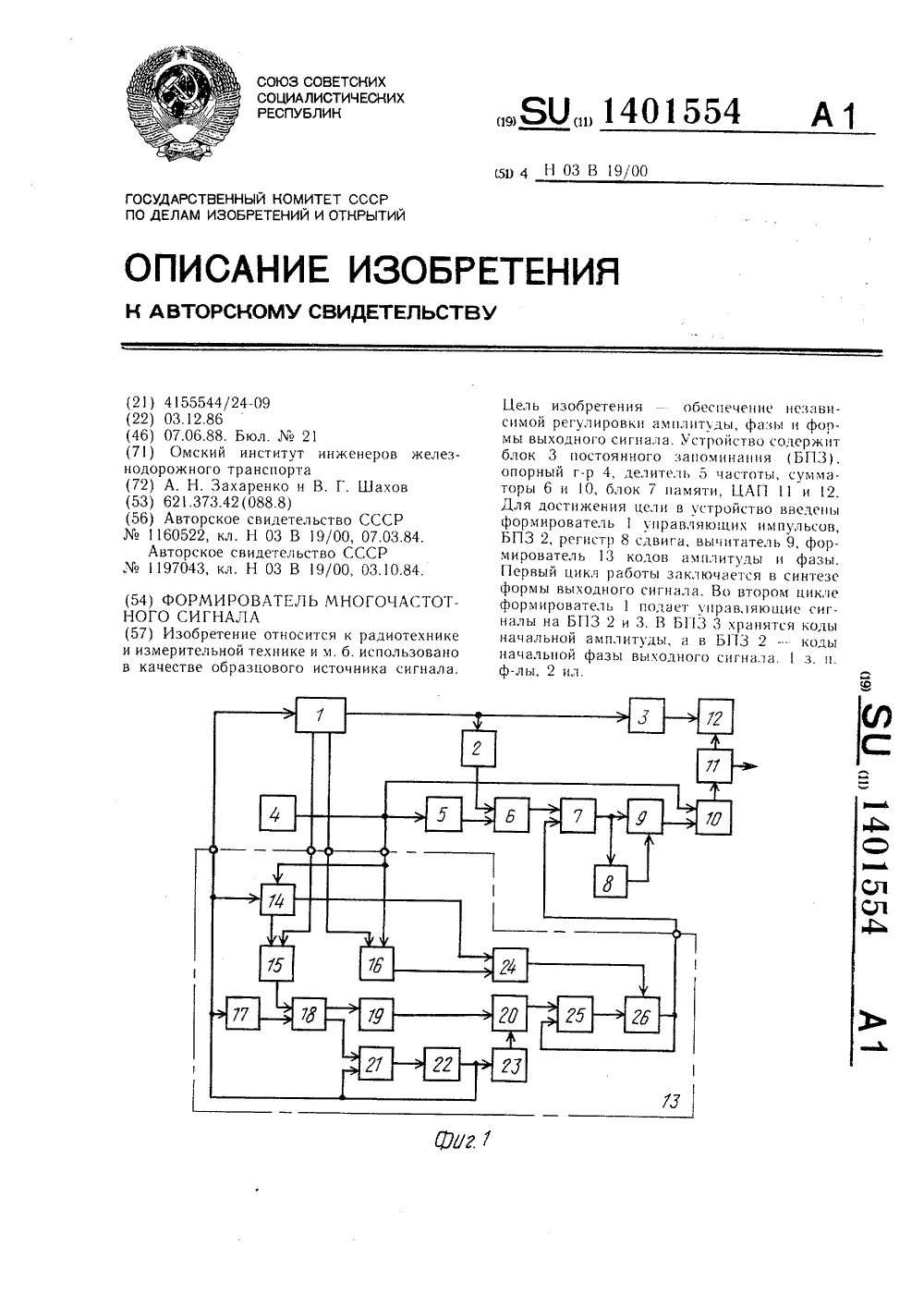
Формирователь многочастотного сигнала
Номер патента: 1401554
Опубликовано: 07.06.1988
МПК: H03B 19/00
Метки: многочастотного, сигнала, формирователь
...22 достигнет значения, соответствующего неучитываемой гармонике синтезируемого сигнала, срабатывает формирователь 1, в который предварительно заносится код неучитываемой гармоники. В результате разрешающий потенциал снимается с второго выхода формирователя 1 и появляется на его третьем выходе. Следовательно, импульсы с выхода опорного генератора 4 поступают на тактовый вход регистра 26 сдвига, в результате чего коды синтезированной кривой переписываются из регистра 26 сдвига в блок 7 памяти, На этом первый цикл работы формирователя многочастотного сигнала заканчивается. Во втором цикле формирователь 1 подает управляюшие сигналы на БПЗ 2 и 3. В БПЗ 3 хранятся коды начальной амплитуды, а в БПЗ 2 - коды начальной фазы выходного сигнала....
Формирователь однополосного сигнала

Номер патента: 1420642
Опубликовано: 30.08.1988
Автор: Волков
МПК: H03C 1/52
Метки: однополосного, сигнала, формирователь
...выходе сумматора 3 образуется колебание, Ч ) = Ц) + + 1-1 уо ) 1-1(-19 сов (м ( ) + К - 0,5 Б ) .3, сов (цА + р(1) + КЧ 2 Х) сов Х Х (со 1+ 45), представляющее собой сумму верхней боковой полосы (ш +др/й), нижней боковой полосы (ы - ду(д 1) и колебание несущей частоты в, которые поступают на один вход сумматора 1 через регулятор 14 уровня и линию 12 задержки. На выходе сумматора 16 образуется колебание 1-16 ) 1-(10 ) 1-у )(1) 1-1 СОВ (Ж 1+ + у ) + К 0,5. (1)1, сов (м 1 - Ч(1) ) -- К 12 сов (и 1 - 45), представляющее собой сумму верхней боковой полосы, нижней боковой полосы и несущей. Колебательные контуры, имеющиеся на выходе сумматоров 13, 16, устраняют гармоники остатков колебания несущей частоты и боковых. Колебание( (т) поступает на...
Программируемый формирователь многочастотного сигнала

Номер патента: 1739472
Опубликовано: 07.06.1992
Авторы: Боронов, Компанеец, Ордынский
МПК: H03B 19/00
Метки: многочастотного, программируемый, сигнала, формирователь
...передачи выходных числовых последовательностей от второго счетчика 11, во второй регистр 19 записывается код микрокоманды, которая выполняется в накопителях 15. В соответствии с алгоритмом работы (фиг. 4) процесс формирования частотных характеристик выходного сигнала описывается многопетлевой структурой, После подачи на вход сигнала "Пуск" структурой, состоящей из второго счетчика 11, мультиплексора 23 и дешифратора 24, формируются сигналы СЯ, которые обеспечивают выполнение микро- команды в накопителях 15. Выполнение микрокоманды сопровождается выдачей результата на второй адресный вход ПЗУ 3 и сохранение в ЮЯ. Если процесс продолжается, то определяется необходимость изменения МК, адреса Яь К, если нет, то определяется условие...
Преобразователь угла поворотавала b электрический сигнал

Номер патента: 830473
Опубликовано: 15.05.1981
Авторы: Павлов, Павловский, Смирнов
Метки: поворотавала, сигнал, угла, электрический
...55вала в электрический сигнал,Преобразователь содержит на статоре обмотку 1 обратной связи и 73 4обмотку 2 возбуждения, оси которых параллельны, первый вывод о"мотки обратной связи и первый вывод обмотки возбуждения подключены к одной из клемм 3 источника питания, уснлигель 4 переменного тпка, вход питания которого соединен с другой клеммой источника питания, а выход подключен к первому выводу обмотки 2 возбуждения, ротор 5 с двумя взаимно перпендикулярными обмотками, блок 6 фазовой коррекции, вход которого соединен с первым выводом обмоткиобратной связи, а выход - с сигнальным входом усилителя 4 переменного тока, блок 7 емкостной нагрузки, включенный параллельно обмотке 2 возбуждения.Преобразователь работает следующим образом.При...
Предыдущий патент: Парусное вооружение
Следующий патент: Система управления общим и циклическим углами установки лопастей подъемно-маршевого воздушного винта
Случайный патент: Устройство для разогрева заполнителей бетонной смеси