Способ регулирования параметров двигателя внутреннего сгорания
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
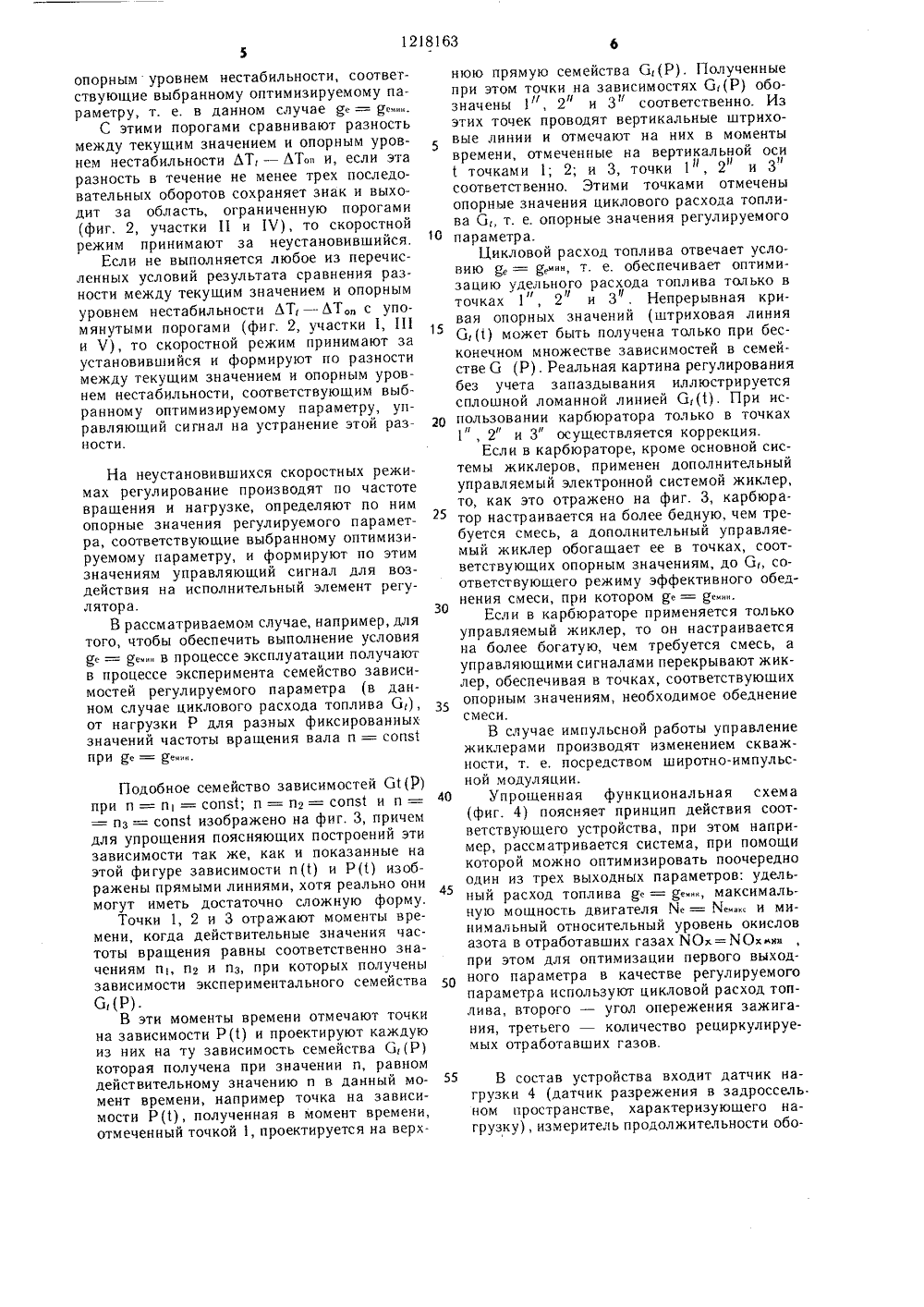
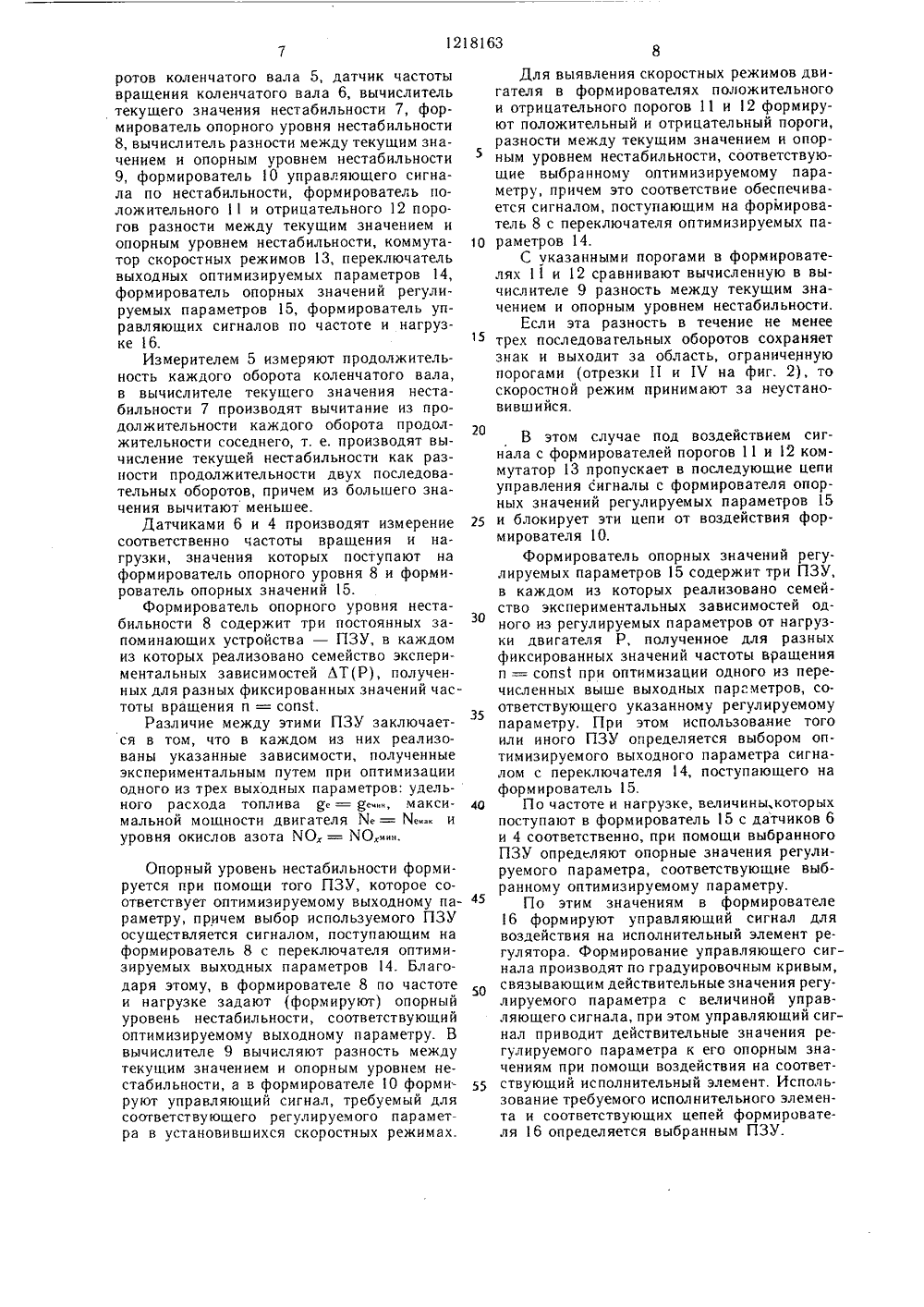
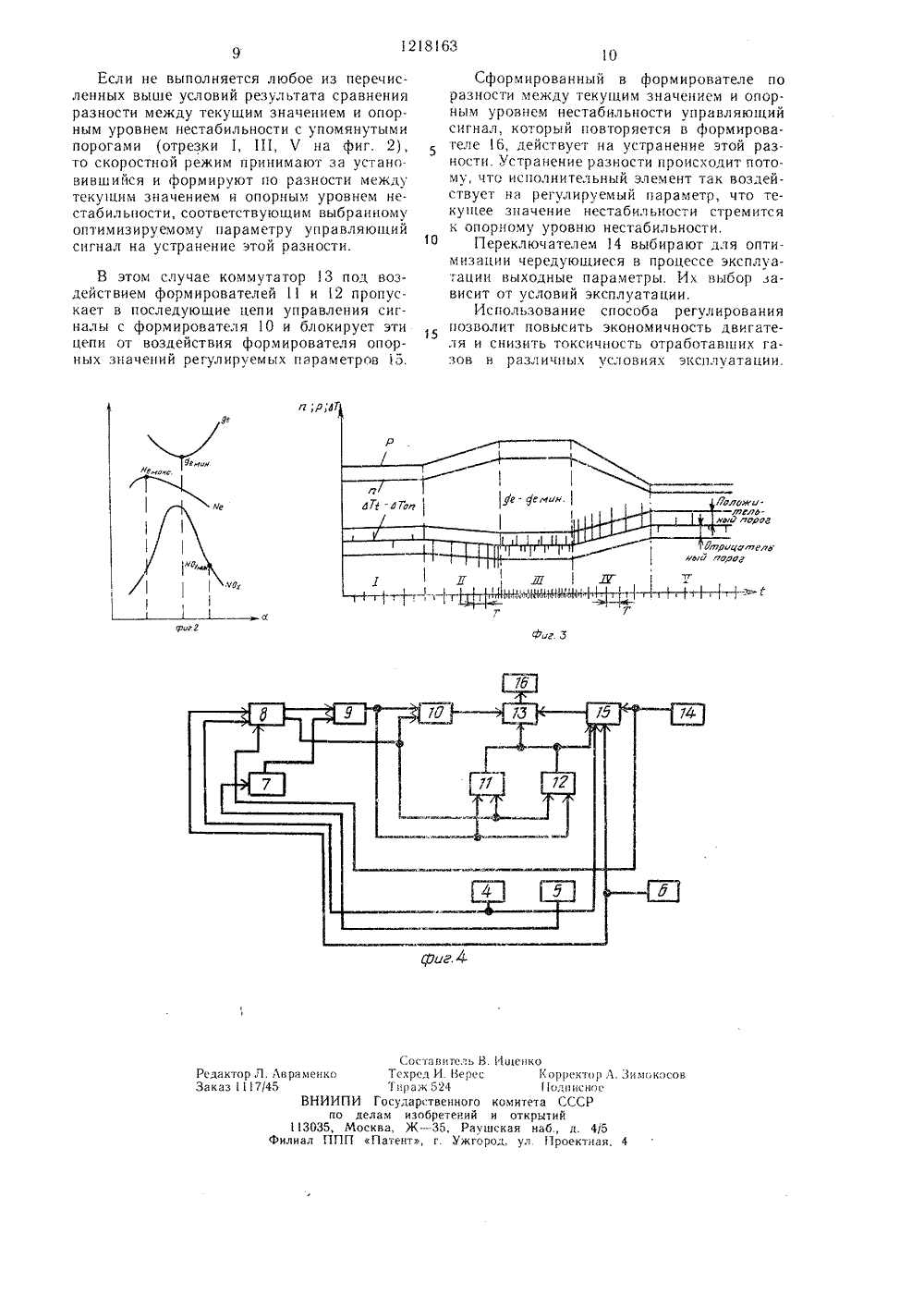
СОЮЗ СОВЕТСНИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИН с 50 4 Г 02 Р 33 00 ОПИСАНИЕ ИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ л;р ГОСУДАРСТВЕННЫЙ НОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ(71) Научно-исследовательский и экспериментальный институт автомобильного электрооборудования и автоприборов(54) (57) СПОСОБ РЕГУЛИРОВАНИЯ ПАРАМЕТРОВ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ путем измерения продолжительности каждого оборота коленчатого вала и нагрузки, вычисления текущего значения нестабильности как разности продолжительности двух последовательных оборотов, задания опорного уровня нестабильности по частоте вращения и нагрузке, соответствующего оптимизируЕмому выходному параметру, вычисления разности между текущим значением и опорным уровнем нестабильности, отличающийся тем, что, с целью повышения топливной экономичности и снижения токсичности отработавших газов путем оптимизации различных выходных параметров и расширения области регулирования, выбирают для оптимизации чередующиеся в процессе эксплуа 801218163 А тации выходные параметры, задают для выявления скоростных режимов двигателя положительный и отрицательный пороги разности между текущим значением и опорным уровнем нестабильности, соответствующие выбранному оптимизируемому параметру, сравнивают с ними вычисленную разность между текущим значением и опорным уровнем нестабильности, если эта разность в течение не менее трех последовательных оборотов сохраняет знак и выходит за область, ограниченную порогами, то скоростной режим принимают за неустановившийся, определяют по нагрузке и частоте вращения вала опорные значения регулируемого параметра, соответствующие выбранному оптимизируемому параметру, и формируют по этим значениям управляющий сигнал для З воздействия на исполнительный элемент регулятора, если не выполняется любое из условий результата сравнения разности между текущим значением и опорным уровнем нестабильности с упомянутыми порогами, то скоростной режим принимают за установившийся и формируют по разности между текущим значением и опорным уров- фью нем нестабильности, соответствующим выб- Я ранному оптимизируемому параметру, другой управляющий сигнал на устранение этой разности,МайИзобретение относится к регулированию двигателей внутреннего сгорания, в частности к регулированию двигателей легкого топлива, в том числе с форкамерно-факельным зажиганием.Известен способ регулирования двигателя внутреннего сгорания путем измерения продолжительности каждого оборота коленчатого вала и нагрузки, вычисления текущего значения нестабильности как разности продолжительности двух последовательных оборотов, задания опорного уровня нестабильности по частоте вращения и нагрузке, соответствующего оптимизируемому выходному параметру, вычисления разности между текущим значением и опорным уровнем нестабильности и формирования по этой разности на неустановившихся скоростных режимах двигателя управляющего сигнала на устранение указанной разности 1.Применение способа обеспечивает повышение экономичности и снижение токсичности. Однако областью регулирования не охватываются неустановившиеся скоростные режимы двигателя и оптимизации подлежит один, заданный для данного двигателя выходной параметр.Цель изобретения - повышение экономичности и снижение токсичности отработавших газов путем оптимизации различных выходных параметров и расширения области регулирования.Поставленная цель достигается тем, что, выбирают для оптимизации чередующиеся в процессе эксплуатации выходные параметры, задают для выявления скоростных режимов двигателя положительный и отрицательный пороги разности между текущим значением и опорным уровнем нестабильности, соответствующие выбранному оптимизируемому параметру, сравнивают с ними вычисленную разность между текущим значением и опорным уровнем нестабильности и, если эта разность в течение не менее трех последовательных оборотов сохраняет знак и выходит за область, ограниченную порогами, то скоростной режим принимают за неустановившийся, определяют по нагрузке и частоте вращения вала опорные значения регулируемого параметра, соответствующие выбранному оптимизируемому параметру, и формируют по этим значениям управляющий сигнал для воздействия на исполнительный элемент регулятора, если не выполняется любое из условий результата сравнения разности между текущим значением и опорным уровнем нестабильности с упомянутыми порогами, то скоростной режим принимают за установившийся и формируют по разности между текущим значением и опорным уровнем нестабильности, соответствующим выбранному оптимизируемому параметру, другой управляющий сигнал на устранение этой разности. На фиг. 1 изображено семейство экспериментальных зависимостей циклового расхода топлива О, от нагрузки двигателя Р,текущие значения частоты вращения и нагрузки и опорные значения циклового рас 5хода топлива (з,; на фиг. 2 - некоторыеэкономические, мощностные и токсическиехарактеристики двигателя в зависимости откоэффициента избытка воздуха а; на фиг. 3 -опорный уровень нестабильности ЛТ, раз 10 ность между текущим значением и опорнымуровнем нестабильности ЛТ - ЛТ. и пороги этой разности; на фиг. 4 - упрощеннаяфункциональная схема системы для реализации способа.На фиг. 1 - 4 и в тексте приняты следующие обозначения:Р - нагрузка двигателя;и - частота врагцения коленчатого вала;Т - продолжительность одного оборотаколенчатого вала;ЛТ - нестабильность оборотов коленчатого вала;ЛТ - текущее значение нестабильностиоборотов коленчатого вала;ЛТ. - опорный уровень нестабильности оборотов коленчатого вала;а - коэффициент избытка воздуха;д - удельный расход топлива;д - относительный уровень минимального удельного расхода топлива;М - мощность двигателя;Х.,;., - относительный уровень максимальной мощности двигателя;МО. - окислы азота в составе отработавших газов;МО - относительный минимальный уровень окислов азота,О, - цикловой расход топлива;6,количество рециркулируемых отработавших газов в процентах к ихобщему количеству;Я - угол опережения зажигания.Способом предусматривается оптимиза 40 ция одновременно одного выходного параметра при помощи одного регулируемогопараметра.Возможна оптимизация, например, следующих выходных параметров: минимального относительного уровня удельного расхода топлива (экономичность), максимального относительного уровня мощности двигателя, минимального относительного уровня окислов азота в составе отработавшихгазов, величины коэффициента избытка воз 50 духа а.Б качестве регулируемых параметров мо.гут быть использованы, например, цикловойрасход топлива 6 ь угол опережения зажигания О, количество рециркулируемых отработавших газов в процентах от ихобщего55 количества О,.Для оптимизации выбирают чередующиеся в процессе эксплуатации выходные параметры. Например, нефиг. 1) при движении5055 автомобиля по загородному шоссе оптимизируют удельный расход топлива, добиваясь выполнения условия д. = д что соответствует режиму эффективного обеднения смеси. Это обеспечивают, например, регулированием циклового расхода топлива 6. При изменении частоты вращения и нагрузки абсолютное значение величины д. = д,. изменяется, но в любом случае этот уровень сохраняется минимальным в данных условиях (относительный минимальный уровень). В таком же смысле являются относительными уровни и других оптимизируемых выходных параметров.Если условия движения требуют получения максимальной мощности, то обеспечивают максимальный относительный уровень мощности Х. = М" например, регулированием угла опережения зажигания Я.При движении автомобиля по городу основным требованием является снижеНие токсичности, поэтому в качестве оптимизируемого выходного параметра можно принять в этом случае минимальный относительный уровень окислов азота в отработавших газах, добиваясь выполнения условия ХО. = МО (минимизация) при некотором допустимом снижении мощности и экономичности (фиг. 1), Минимизация уровня окислов азота может быть обеспечена, например, регулированием рециркуляции отработавших газов.При регулировании карбюраторного двигателя предполагается, что карбюратор сам по себе обеспечивает выполнение минимальных требований к экономическим мощностным и токсическим параметрам двигателя. Рассматриваемым способом производится только дополнительная корректировка регулируемых параметров для улучшения в зависимости от условий эксплуатации выходных параметров.Процессы регулирования поясняются на примере оптимизации удельного расхода топлива, когда ее результатом является соблюдение условия де = дениц, причем оптимизация осуществляется регулированием циклового расхода топлива 6, который является регулируемым параметром. При использовании в системе топливоподачи электронного карбюратора регулирование циклового расхода топлива предлагаемым способом заключается в коррекции работы карбюратора.Регулирование на установившихся и на неустановившихся режимах основано на двух разных принципах. Регулирование на не- установившихся скоростных режимах производят по частоте вращения коленчатого вала и нагрузке, а регулирование на установившихся скоростных режимах - по нестабильности периода вращения коленчатого вала.Процесс регулирования по нестабильности основан на том, что величина нестабильности оборотов коленчатого вала ЛТ 5 10 15 20 25 30 35 40 45 при данном значении частоты вращения и и нагрузки Р при осуществлении оптимизации определенного выходного параметра, в данном случае при соблюдении условия д. = = д . однозначно зависит от значения регулируемого параметра, в данном случае отциклового расхода топлива б.Чтобы обеспечить выполнение условия д. = д, в процессе эксплуатации добиваются его выполнения в процессе эксперимента. При этом, например, получают семейство экспериментальных зависимостей ЛТр при разных фиксированных значениях (без учета нестабильности) частоты вращения и = сопз 1 при соблюдении условия Де = 1 счин) .Эти зависимости реализуют в постоянном запоминающем устройстве соответствующей системы регулирования и по ним определяют, т. е. задают по частоте п и нагрузке Р опорный уровень нестабильности ЛТ-, соответствующий выбранному оптимизируемому параметру, т. е. д. = д.Каждому значению ЛТ- соответствует определенное значение циклового расхода топлива 6.На установившихся скоростных режимахпо разности между текущим значением иопорным уровнем нестабильности ЛТ, -ЛТ- формируют управляющий сигнал наустранение этой разности, т. е. ЛТ - ЛТ. является сигналом ошибки в цепи отрицательной обратной связи,В связи с этим в установившихся скоростных режимах текущая нестабильность ЛТ стремится к опорному уровню ЛТ-, ацикловой расход топлива 6 соответствуетопорному уровню нестабильности, при котором выполняются условия оптимизации д.=Ясцнн.Текущее значение нестабильности вычисляют как разность продолжительности двух последовательных оборотов, в связи с этим измеряют продолжительность каждого обонрота коленчатого вала, так как опорныи уровень нестабил ьности является положительной величиной, то текущее значение нестабильности тоже должно быть положительным. Поэтому при его вычислении из большего значения продолжительности оборота вычитают меньшее значение.Выявление скоростных режимов (фиг. 2) основано на том, что в установившихся скоростных режимах величина разности между текущим значением и опорным уровнем нестабильности ЛТ - ЛТ невелика, а знак равновероятен, тогда как в неустановившихся скоростных режимах эта разность в течение нескольких соседних оборотов имеет определенный знак и достигает значительной величины.Для выявления скоростных режимов задают положительный и отрицательный пороги разности между текущим значением и5 1 С 15 2 Р 25 зо 35 40 45 опорным уровнем нестабильности, соответствующие выбранному оптимизируемому параметру, т. е. в данном случае д. = д".,С этими порогами сравнивают разность между текущим значением и опорным уровнем нестабильности ЛТ - ЛТ- и, если эта разность в течение не менее трех последовательных оборотов сохраняет знак и выходит за область, ограниченную порогами (фиг. 2, участки 11 и 1 Ч), то скоростной режим принимают за неустановившийся.Если не выполняется любое из перечисленных условий результата сравнения разности между текущим значением и опорным уровнем нестабильности ЛТ - ЛТ,с упомянутыми порогами (фиг. 2, участки 1, 111 и Ч), то скоростной режим принимают за установившийся и формируют по разности между текущим значением и опорным уровнем нестабильности, соответствующим выбранному оптимизируемому параметру, управляющий сигнал на устранение этой разности. На неустановившихся скоростных режимах регулирование производят по частоте вращения и нагрузке, определяют по ним опорные значения регулируемого параметра, соответствующие выбранному оптимизируемому параметру, и формируют по этим значениям управляющий сигнал для воздействия на исполнительный элемент регулятора.В рассматриваемом случае, например, длятого, чтобы обеспечить выполнение условия де = д"- в процессе эксплуатации получают в процессе эксперимента семейство зависимостей регулируемого параметра (в данном случае циклового расхода топлива б), от нагрузки Р для разных фиксированных значений частоты вращения вала п = сопЫ при 1 е = дечнн,Подобное семейство зависимостей 61(Р) при и = п = сопЫ; п = п = сопз 1 и п = = пз = сопМ изображено на фиг. 3, причем для упрощения поясняющих построений эти зависимости так же, как и показанные на этой фигуре зависимости п(1) и Р(1) изображены прямыми линиями, хотя реально они могут иметь достаточно сложную форму,Точки 1, 2 и 3 отражают моменты времени, когда действительные значения частоты вращения равны соответственно значениям п, п и пз, при которых получены зависимости экспериментального семейства б(Р).В эти моменты времени отмечают точки на зависимости Р(1) и проектируют каждую из них на ту зависимость семейства 6(Р которая получена при значении и, равном действительному значению п в данный момент времени, например точка на зависимости Р(1), полученная в момент времени, отмеченный точкой 1, проектируется на верхнюю прямую семейства б,(Р). Полученные при этом точки на зависимостях 6(Р) обозначены 1, 2 и 3" соответственно. ИзЦэтих точек проводят вертикальные штриховые линии и отмечают на них в моменты времени, отмеченные на вертикальной оси 1 точками 1; 2; и 3, точки 1", 2 ц и 3" соответственно. Этими точками отмечены опорные значения циклового расхода топлива б, т. е. опорные значения регулируемого параметра.Цикловой расход топлива отвечает условию яе = де, т. е. обеспечивает оптимизацию удельного расхода топлива только в точках 1, 2 и 3 . Непрерывная крин // /вая опорных значений (штриховая линия б(1) может быть получена только при бесконечном множестве зависимостей в семействе б (Р) . Реальная картина регулирования без учета запаздывания иллюстрируется сплошной ломанной линией б(1), При использовании карбюратора только в точках 1", 2 ф и Зф осуществляется коррекция.Если в карбюраторе, кроме основной системы жиклеров, применен дополнительный управляемый электронной системой жиклер, то, как это отражено на фиг. 3, карбюратор настраивается на более бедную, чем требуется смесь, а дополнительный управляемый жиклер обогащает ее в точках, соответствующих опорным значениям, до бь соответствующего режиму эффективного обеднения смеси, при котором д. = д.,.Если в карбюраторе применяется только управляемый жиклер, то он настраивается на более богатую, чем требуется смесь, а управляющими сигналами перекрывают жиклер, обеспечивая в точках, соответствующих опорным значениям, необходимое обеднение смеси.В случае импульсной работы управление жиклерами производят изменением скважности, т. е, посредством широтно-импульсной модуляции.Упрощенная функциональная схема (фиг. 4) поясняет принцип действия соответствующего устройства, при этом например, рассматривается система, при помощи которой можно оптимизировать поочередно один из трех выходных параметров: удельный расход топлива д = де-, максимальную мощность двигателя Хе = Мемаки минимальный относительный уровень окислов азота в отработавших газах 1 Ч О = М Ох к при этом для оптимизации первого выходного параметра в качестве регулируемого параметра используют цикловой расход топлива, второго - угол опережения зажигания, третьего - количество рециркулируемых отработавших газов,В состав устройства входит датчик нагрузки 4 (датчик разрежения в задроссель. ном пространстве, характеризующего нагрузку), измеритель продолжительности обо5 10 15 ротов коленчатого вала 5, датчик частоты вращения коленчатого вала 6, вычислитель текущего значения нестабильности 7, формирователь опорного уровня нестабильности 8, вычислитель разности между текущим значением и опорным уровнем нестабильности 9, формирователь 10 управляющего сигнала по нестабильности, формирователь положительного 11 и отрицательного 12 порогов разности между текущим значением и опорным уровнем нестабильности, коммутатор скоростных режимов 13, переключатель выходных оптимизируемых параметров 14, формирователь опорных значений регулируемых параметров 15, формирователь управляющих сигналов по частоте и нагрузке 16.Измерителем 5 измеряют продолжительность каждого оборота коленчатого вала, в вычислителе текущего значения нестабильности 7 производят вычитание из продолжительности каждого оборота продолжительности соседнего, т. е. производят вычисление текущей нестабильности как разности продолжительности двух последовательных оборотов, причем из большего значения вычитают меньшее.Датчиками 6 и 4 производят измерение соответственно частоты вращения и нагрузки, значения которых поступают на формирователь опорного уровня 8 и формирователь опорных значений 15.Формирователь опорного уровня нестабильности 8 содержит три постоянных запоминающих устройства - ПЗУ, в каждом из которых реализовано семейство экспериментальных зависимостей ЛТ(Р), полученных для разных фиксированных значений частоты вращения и = сопМ.Различие между этими ПЗУ заключается в том, что в каждом из них реализованы указанные зависимости, полученные экспериментальным путем при оптимизации одного из трех выходных параметров: удельного расхода топлива д. = д" максимальной мощности двигателя Х. = Яе и уровя окисло азоа МО= ХО".,Опорный уровень нестабильности формируется при помощи того ПЗУ, которое соответствует оптимизируемому выходному параметру, причем выбор используемого ПЗУ осуществляется сигналом, поступающим на формирователь 8 с переключателя оптимизируемых выходных параметров 14. Благодаря этому, в формирователе 8 по частоте и нагрузке задают (формируют) опорный уровень нестабильности, соответствующий оптимизируемому выходному параметру. В вычислителе 9 вычисляют разность между текущим значением и опорным уровнем нестабильности, а в формирователе 10 формируют управляющий сигнал, требуемый для соответствующего регулируемого параметра в установившихся скоростных режимах. 20 25 Зо 35 40 45 50 55 Для выявления скоростных режимов двигателя в формирователях положительного и отрицательного порогов 11 и 12 формируют положительный и отрицательный пороги, разности между текущим значением и опорным уровнем нестабильности, соответствующие выбранному оптимизируемому параметру, причем это соответствие обеспечивается сигналом, поступающим на формирователь 8 с переключателя оптимизируемых параметров 14.С указанными порогами в формирователях 11 и 12 сравнивают вычисленную в вычислителе 9 разность между текущим значением и опорным уровнем нестабильности.Если эта разность в течение не менее трех последовательных оборотов сохраняет знак и выходит за область, ограниченную порогами (отрезки 11 и 1 Ч на фиг. 2), то скоростной режим принимают за неустановившийся. В этом случае под воздействием сигнала с формирователей порогов 11 и 12 коммутатор 13 пропускает в последующие цепи управления сигналы с формирователя опорных значений регулируемых параметров 15 и блокирует эти цепи от воздействия формирователя 10.Формирователь опорных значений регулируемых параметров 15 содержит три ПЗУ, в каждом из которых реализовано семейство экспериментальных зависимостей одного из регулируемых параметров от нагрузки двигателя Р, полученное для разных фиксированных значений частоты вращения п = сопэ 1 при оптимизации одного из перечисленных выше выходных параметров, соответствующего указанному регулируемому параметру. При этом использование того или иного ПЗУ определяется выбором оптимизируемого выходного параметра сигналом с переключателя 4, поступающего на формирователь 15.По частоте и нагрузке, величины, которых поступают в формирователь 15 с датчиков 6 и 4 соответственно, при помощи выбранного ПЗУ определяют опорные значения регулируемого параметра, соответствующие выбранному оптимизируемому параметру.По этим значениям в формирователе 16 формируют управляющий сигнал для воздействия на исполнительный элемент регулятора. Формирование управляющего сигнала производят по градуировочным кривым, связывающим действительные значения регулируемого параметра с величиной управляющего сигнала, при этом управляющий сигнал приводит действительные значения регулируемого параметра к его опорным значениям при помощи воздействия на соответствующий исполнительный элемент. Использование требуемого исполнительного элемента и соответствующих цепей формирователя 16 определяется выбранным ПЗУ.1218163 9 а;рд льье.лчльс 7 /7 ь 50 ьа алголь.ог ФЫ 7Ф Составители В.Техред И. 15 ересТираж 524И Государственногоделам изобретений иМосква, Ж - 35, РаушП Патент, г. Ужгоро Ищенко1(орректор д. 311 одинсноеомитета СССРоткрытийк а я на 6., д. 4/5д, ул Проектная, 4 Л. Лвраменко17/45ВНИИПпо113035,Филиал ПП Редак Заказ мо косо Если не выполняется любое из перечисленных выше условий результата сравнения разности между текущим значением и опорным уровнем нестабильности с упомянутыми порогами (отрезки 1, 1 П, Ч на фиг. 2), то скоростной режим принимают за установившийся и формируют по разности между текущим значением и опорным уровнем нестабильности, соответствующим выбранному оптимизируемому параметру управляющий сигнал на устранение этой разности. В этом случае коммутатор 3 под воздействием формирователей 11 и 12 пропускает в последующие цепи управления сигналы с формирователя 10 и блокирует этин5 цепи от воздеиствия формирователя опорных значений регулируемых параметров 15. Сформированный в формирователе по разности между текущим значением и опорным уровнем нестабильности управляющий сигнал, который повторяется в формирователе 16, действует на устранение этой разности, Устранение разности происходит потому, что ис 1 юлнительный элемент так воздействует на регулируемый параметр, что текущее значение нестабильности стремится к опорному уровню нестабильности.Переключателем 14 выбирают для оптимизации чередующиеся в процессе эксплуа;ации выходные параметры, Их выбор зависит от условиЙ эксплуатации.Использование способа регулирования позволит повысить экономичность двигателя и снизить токсичность отработавших газов в различных условиях эксплуатации.
СмотретьЗаявка
2820797, 20.09.1979
НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ И ЭКСПЕРИМЕНТАЛЬНЫЙ ИНСТИТУТ АВТОМОБИЛЬНОГО ЭЛЕКТРООБОРУДОВАНИЯ И АВТОПРИБОРОВ
БОРОЗДИН ЕВГЕНИЙ МИХАЙЛОВИЧ, НАБОКИХ ВЛАДИМИР АНДРЕЕВИЧ, РЕГЕЛЬСОН ЛЕВ МОИСЕЕВИЧ, ЧЕРНЯК БОРИС ЯКОВЛЕВИЧ
МПК / Метки
МПК: F02D 33/00
Метки: внутреннего, двигателя, параметров, сгорания
Опубликовано: 15.03.1986
Код ссылки
<a href="https://patents.su/6-1218163-sposob-regulirovaniya-parametrov-dvigatelya-vnutrennego-sgoraniya.html" target="_blank" rel="follow" title="База патентов СССР">Способ регулирования параметров двигателя внутреннего сгорания</a>
Прибор для измерения мгновенных значений расхода топлива

Номер патента: 115679
Опубликовано: 01.01.1958
МПК: G01F 1/06, G01F 1/10, G01P 5/06
Метки: значений, мгновенных, прибор, расхода, топлива
...крь(льчатка, а такж( фотоэлектрическлй преобр а зова тел 1, и (та гн ито 57 ндук 17 ион(ь:и измеритель, приводимый в ,17 ействие (;инхронным гистерезисным электродвигателем, Все это обеспечивает линсйну:о шкалу приора и высоку 1 О точность (измерс-Я .7113 чертеже 770 казан 7 77 р 57 нц(7. циальная схема 1;рибора.Крыльчаткапри свооодном вращении в потоке кидкости пересекает сзоимн лоагтями световые лучи, падающие от осветителей 2 на фотосопротивления 3. Возни:а 1 О 1 ццс им 1:, л сы тока, проходя предварительное усиление в бло ах ., формпрованце в фазовраща-елях 5 и оконча.ельпое усиление (1 б-,с(;,ах 7 " о(тупа 1 от 11 а измеритель 7 с синхронн 1 м гистерезис 7 ь(м .лектродвигателем. Ц р 1 о 7 д измерени мгновеин;(х зняен 777 й расхода...
Компенсатор для измерения напряжений

Номер патента: 319904
Опубликовано: 01.01.1971
Авторы: Барабащук, Подгурский, Чигирин
МПК: G01R 17/00, G01R 19/00
Метки: компенсатор, напряжений
...4 и выходной нормализатор б на схему 9 сравнения, уравновешивается опорным напряжением 11 спри входном сигнале постоянного и переменного тока и напряжением с выхода схемы 8 анализа напряжения сети при определении перемещений,Погрешность измерения перемещения из-за нестабильности напряжения первичной сети устраняется благодаря тому, что выпрямленное напряжение сети, поступающее из схемы 15 и устанавливаемое на определенный уровень нормализатором 16, сравнивается с измеряемым напряжением в схеме 9 сравнения (в качестве опорного).Компенсатор с автоматизированной подачей сигнала с контролируемого объекта состоит из схемы 20 выделения колебаний сети, напряжение которого в противофазе с измеряемым напряжением поступает на схему 21...
Способ регулирования подачи топлива в двигатель внутреннего сгорания с байпасным воздушным каналом холостого хода

Номер патента: 1731972
Опубликовано: 07.05.1992
Авторы: Гирявец, Муравлев, Теремякин
МПК: F02M 41/00
Метки: байпасным, внутреннего, воздушным, двигатель, каналом, подачи, сгорания, топлива, хода, холостого
...хода регулируемого сечения с помощью регулятора 6, электромагнитную форсунку 7 для подачи топлива во впускнойили в приращениях 40 50 55 трубопровод, датчик 8 угловых импульсов для измерения частоты вращения коленчатого вала 9 двигателя и датчик 10 положения дроссельной заслонки 3, которые подключены к входам электронного блока 11 управления, к выходам 12 и 13 которого подключены соответственно регулятор 6 и электромагнитная форсунка 7. Регулятор 6 выполнен в виде электромеханического быстродействующего устройства, на подвижном элементе которого закреплен золотник, с помощью которого изменяется проходное сечение воздушного байпасного канала холостого хода. Блок 11 управления (фиг. 2) состоит из формирователя 14 сигнала угловых...
Регулятор подачи топлива в двигатель

Номер патента: 200965
Опубликовано: 01.01.1967
МПК: F02C 9/26
Метки: двигатель, подачи, регулятор, топлива
...пока не откроется проточка во втулке б. После этого давление в полости б падает, и движение поршня прекращается.Если поршень 1 находится в крайнем левом 30 полокении, то полость б через проточку в200965 Ф Рлр 7 амуупра 5 пяющемц КпВРООИПупрадлйаЦеиУ Составитель М. Миримскии Редактор Н. Корченко Техред Т. П. Курилко Корректоры: Г. И. Плешакова и С. ф. Гоптаренкоаказ 3187/13 Тираж 535 ПодписноеЦНИИПИ Комитета по делам изобретепий и открытий при Совстс Министров СССР Москва, Центр, пр, Серова, д. 4 афин, пр. Сапунова,штоке и отверстие во втулке соединяется со сливом, давление в ней меньше, чем в полости а, и поршень 1 перемещается вправо до тех пор, пока втулка 5 не прикроет отверстие в сливе. Изменение положения поршня 2 приводит к...
Регулятор постоянного расхода топлива в двигатель

Номер патента: 284513
Опубликовано: 01.01.1970
Авторы: Артемьев, Егоров, Левшин, Макаров
МПК: F02C 9/26
Метки: двигатель, постоянного, расхода, регулятор, топлива
...приведена схема подачи топлива в КРД с применением предлагаемого регулятора.Топливо из емкости 1 под вытесняющим давлением баллона 2 поступает в полость Л регулятора. К корпусу 4 жестко прикреплена опора 5 с уступами б. На опоре установлена пластина 7 с толщиной на порядок больше, чем толщина мембраны в известных регуляторах. Через плоский клапан 8 топливо поступает по каналу 9 в двигатель. Необходимый расход поддерживается путем дросселирования отверстия пластиной 7, которая в зависимости от перепада давления на регуляторе прогибается и меняет свою жесткость, так как меняется точка опоры незакрепленного ее конца. При увеличении перепада жесткость пластины увеличивается, так как уменьшается ее длина до точек опоры, сечение уменьшается, и...
Предыдущий патент: Свободнопоршневой двигатель внутреннего сгорания
Следующий патент: Блок цилиндров двигателя внутреннего сгорания
Случайный патент: Гидравлический переключатель подачи жидкости