Система определения параметров взаимного положения судов при траверзной передаче груза в море на ходу
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
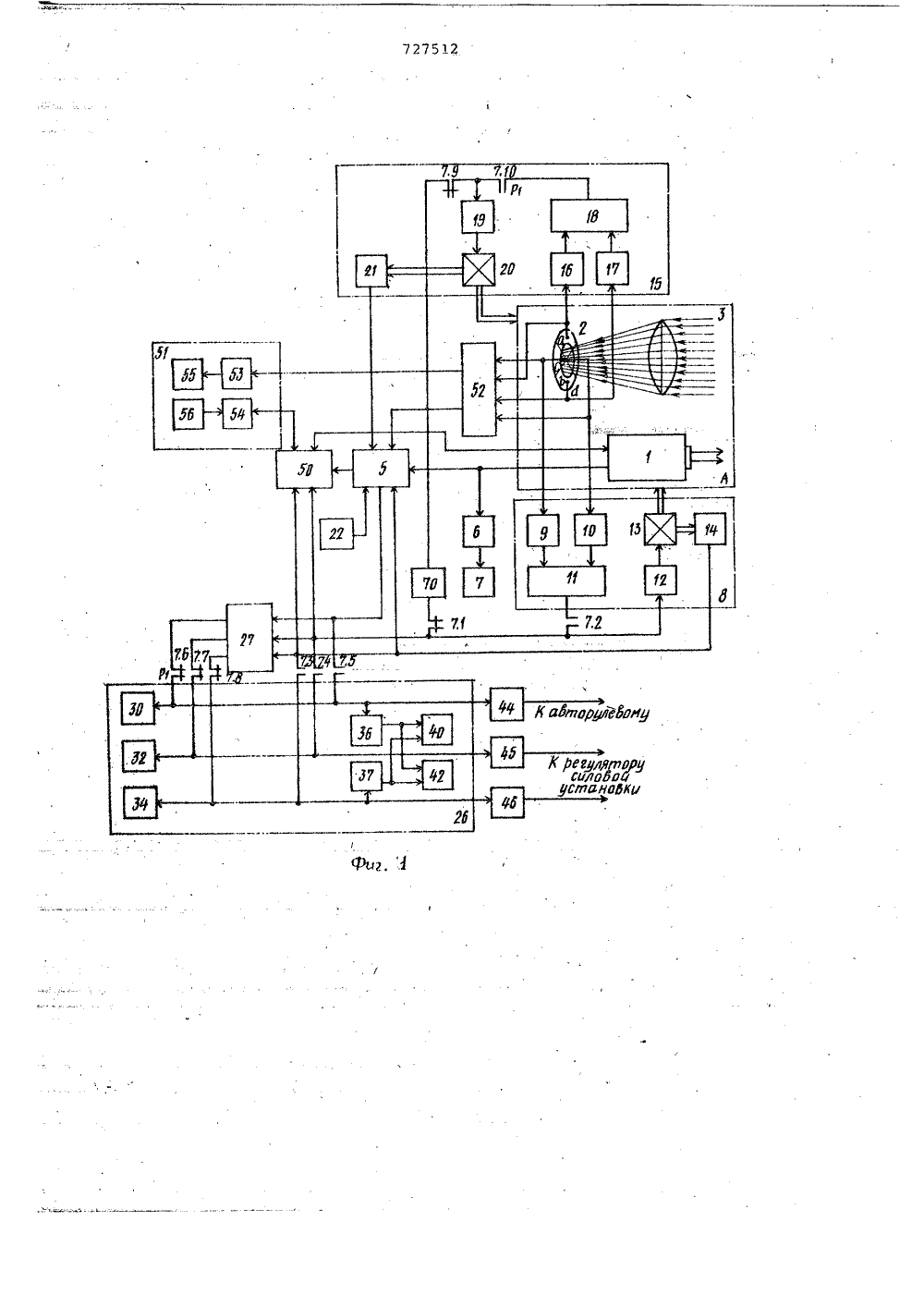
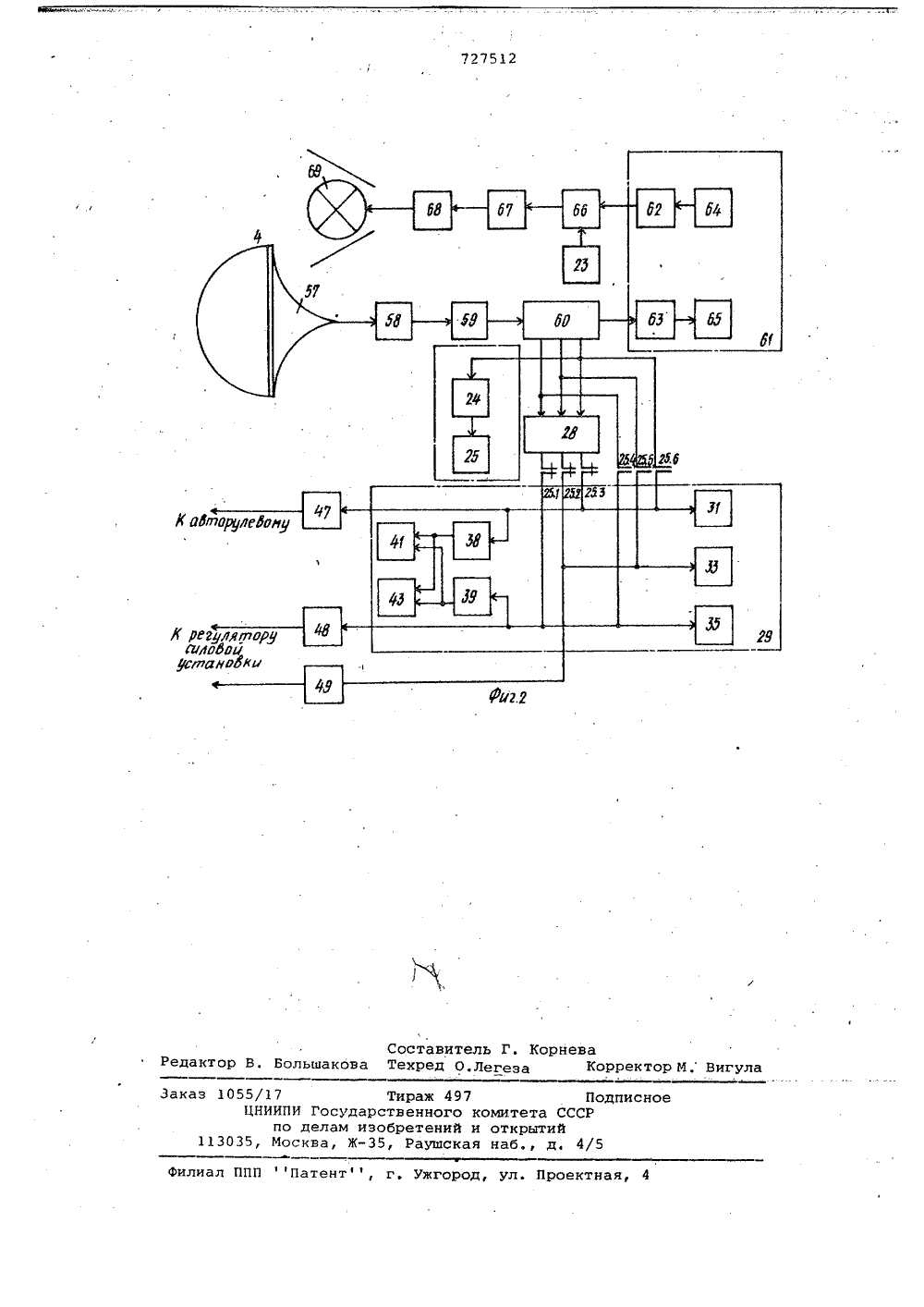
Союз Советскик Социалистических Республик: В 63 В 27/18 с присоединением заявк (23) ПриоритетОпубликовано 15048ъ осударственный комнте СССР по делам изобретений н открытнй фата опубликования описания 15,0(72) Авторы изобретени Завирухо,Н. Демидович и Е.М. Павлов 1) Заявите ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ВЗАИМНОГОИЯ СУДОВ ПРИ ТРАВЕРЗНОЙ ПЕРЕДАЧЕГРУЗА В МОРЕ НА ХОДУ2 4) СИСТЕМА ПОЛОЖтение относится к технике взаимного положения двух объектов, а именно судов, ствующих при траверэной грузов. Изоб измерен подвижны взаимод передачтеоихусту Известна система определения параметров взаимного положения судов при траверзной передаче груза в море на ходу, содержащая устройства измерения расстояния между судами, взаимного продольного смещения судов, вертикального отклонения мер- ной линии от перпендикуляра к диаметральной плоскости разгружаемого судна, датчики качки взаимодействующих судов, соединенные с суммирующим блоком, выход которого связан с индикаторным блоком (1). стной системы ежность работы,сбоями в работе ной линии связи ми системы, уста-, 2 ужаемом и прини том указанныйтся наиболее суучае, когда в каприменяется не 3 м на ройом све ди- орогоНедостатком изв ляется низкая на вызываемая текущим из-за нарушения ме между полукомплект новленными на разгр мающем судах. При э недостаток проявляе щественно в том сл честве линии связи механическая, а например, волноваялиния связи,Цель изобретения - повышение надежности системы,Цель достигается тЕм, что сис,ма снабжена установленными на обсудах и подключенными к выходамройств измеренйя расстояния междсудами пороговыми устройствами среле на их выходах и блоками памяти, включенными через контакты релепороговых устройств в цепь связисуммирующего и индикаторных блоков.На Фиг. 1 изображена функциональ 5 ная схема полукомплекта раэгружаемо-го судна; на фиг. 2 - функциональная схема полукомплекта принимающего судна.Система включает в себя устройстО во измерения расстояния между судамивыполненное на светодальномере 1(Фиг. 1), установленном на головкенаведения разгружаемого судна, снабженной Фотодиодом 2 и оптическим5 элементом 3 и оптически связанным сним отражателем 4, установленнопринимающем судне (Фиг, 2). Устство измерения расстояния выходтодальномера 1 электрически сое0 нено с суммирующим блоком 5 и п727512 Линия связи между судами полукомплекта разгружаемого судна (Фиг. 1) сосодт иэ блока 50 уплотнения, соединенного своими входами с выходом ,суммирующего блока 5, с электрическими выходами устройства 8, с переговорным устройством 51, а выходом - с входом светодальномера 1 устройства еб измерения расстояния между судами, из блока 52 разделения, входы которого соединены с секторами фотодиода 2, а выходы - с суммирующим блоком 5 и переговорным устройством 51. 5 ВЮЭЩФВФВМВя." ймФмм; ,=., .1 ео . вым устройством б с подключенным наего выходе реле 7 с контактами 7,17.10. В систему входит также устройство 8 йзмерения взаимного продольного смещения судов. Оно состоитиз усилителей 9, 10, выходы которыхподключены к входам сравнивающегоблока 11, который через контакт 7.2реле 7 соединен с электродвигателем12. Последний выходным валом соединенс входом понижающего редуктора13, к которому механически крепитсядатчик 14 смещения отслеживающихдвижений головки устрэйств.К выходам фотодиода 2 подключено,также устройство 15 измерения вертикального отклонения мерной линии 15от перпендикуляра к диаметральной "пМОСкостй разгружаемого судна, которое по своей структуре аналогичноустройству 8 и содержит усилители16 и 17, сравнивающий блок 18, электродвигатель 19, редуктор 20 и датчик21 смещения.К одним входам суммирующего блока5 подключены датчик 22 качки разгру жаемо 1 о судна и через линию связи датчик 23 (фиг, 2) качки принимающего 25судна. Выход суммирующего блока 5йбдйЖчен"через линию связи-к порого "вбму устройству ПУ 24 принимающего -"полукомплекта с подключенным к еговыходу реле 25, а также с индикатор- ЗОным блоком 26 через блок 27 памятииконтакты 7,6-78 реле 7, а такжечерез линию связи - с блоком 28 памяти и через контакты 25.1-25.6 реле25 - с индикаторным блоком 29 принимающего судна (фиг. 2). Индикаторные блоки 26 и 29 содержат индикаторы 30 и 31 расстояния, индикаторы 32, 33 скоростй смещения 40 и индикаторы 34, 35 смещения, Параллельно индикаторам 30, 31 и 34, 35 подключены пороговые устройства 36, 37 и 38, 39, соединенные своими вы- .ходами с устройствами звуковой 40 и 41 и световой 42, 43 сигнализации. 45 Выходы индикаторных блоков соединены с согласующими устройствами 44, 45, 46 (Фиг. 1) и 47, 48, 49 (фиг, 2), Эти устройства служат для передачи соответствующей информации к регу ляторам силовой установки и авторулевому судов. Всостав перегонорного устройства51 входят два усилителя низкой частоты 53, 54, соединенные соответственно с громкоговорителем 55 и микрофоном 56.В полукомплекте принимающего судна (Фиг. 2) предусмотрен световод57, оптически соединяющий отражатель4 с фотоэлектронным умножителем 58.Выход умножителя 58 соедйнен черезусилитель 59 с блоком 60 разделения.Выходы блока 60 соединены через контакты 25.4-25.6 реле 25 с индикаторным блоком 29, с блоком 28 памяти,с пороговым устройством 24, с переговорным устройством 61, которое состоит из усилителей 62, 63 и связанных с ними соответственно микрофона64 и громкоговорителя 65.Выходусилителя 62 соединенсблоком 66 уплотнения, второй входкоторого соединен с датчиком 23 качки, а выход - с усилителем 67 поднесущих, который соединен с модулятором 68, подключенном к источнику69 монохроматического света.для осуществления сканирования го-ловки наведения в полукомплекте раз- .гружаемого судна (фиг. 1) установлен программный блок 70 поиска, который через контакты 7,1 и 7.9 реле7 соединен с электродвигателями 12и 19 устройств 8 и 15.Система работает следующим образом.Излучение источника 69 монохроматического света принимающего полукомплекта фокусируется оптическимэлементом 3 на секторах фотодиода2 головки йаведения. С секторов Фотодиода 2 электрические сигналы поступают на входы устройств 8 и 15которые ориентируют головку наведения строго на источник 69.Положение головки нанедения регистрируется датчиками 14 и 21 смещения,сигналы с которых поступают н суммирующий блок 5. Туда же поступаютсигналы с выхода светодальномера1 устройства измерения расстояниямежду судами и с датчиков 22 и 23качки,В суммирующем блоке 5 происходитмасштабирование сигналов и их алгебраическое суммирование, В результате этого на выходе блока 5 формируется электрический сигнал, несущий информацию о истинном текущем значении расстояния между судами измеренного по линии перпендикуляра к диаметральной плоскости разгружаемогосудна. Сигналы о взаимном продольном смещении и скорости смещениясудов Формируются на выходах сравни вающего блОка 11 и датчика 14 смещения. Эти информационные сигналы поступают в индикаторные блоки 26 и 29,а также н блоки 27, 28 памяти. Сигналы расстояния и смещения поступаюттакже на пороговые устройства 36, 37, 38, 39, которые при выходе измеряемого параметра за границу допустимого срабатывают и включают устройства звуковой 40, 41 и световой 42, 43 сигнализации. 5Взаимосвязь между полукомплектами системы осуществляется следующим образом. В полукомплекте разгружаемого .судна информационные сигналы, а также сигнал с переговорного устрой- О ства 51 поступают в блок 50 уплот 1 нения. Суммарный информационный сигнал с блока 50 поступает на вход светодальномера 1, где щодулирует луч источника излучения светодальномера.15Часть энергии луча, попадающего на отражатель 4 возвращается обратно к светодальномеру 1, где участвует в формировании информационного сигнала о расстоянии между судами., 2 О Другая часть энергии луча передается световодом 57 для преобразования и усиления на умножитель 58 и усилитель 59. Усиленный сигнал поступает в блок 60 разделения, где происходитдемодуляция и разделение 1 полезной информации. С выхода блока 60 сигналы в соответствии с их назначением поступают на индикаторный блок 29, блок 28 памяти и переговорное устройство 61 принимающего судна.Для передачи информации с принимаю щего судна на передающий сигналы с датчика 23 качки и переговорного устройства 61 поступают в блок 66 З 5 уплотнения, с которого сформирован-. ный суммарный информационный сигнал после усиления усилителем 67 поднесущих подводится к модулятору 68 для модуляции несущей источника 69 моно О хроматического света. В полукомплекте раэгружаемого судна этот сигнал с фотодиода 2, кроме вышеуказанного, поступает в блок 52 разделения, Фуйкциональное назначение которого аналогично блоку 60 принимающего полу- комплекта. С выхода блока 52 сигналы качки принимающего судна поступают в суммирующий блок 5, а телефонной связи - в переговорное устройство 51.При рассогласовании головки наведения с источником 69 монохроматического света или, что одно и то же, луча светодальномера 1 с отражателем 4 нарушается связь между полу комплектами. При этом на выходе устройства измерения расстояния(светодальномера 1) пропадает информационный сигнал о расстоянии, что приводит к переключению порогового устройства б, которое обесточивает реле 7. Реле 7 своими контактами на время отсутствия сигнала со светодальномера 1 подключает к индикаторному блоку 26 блок 27 памяти, где хранится последнее действительное.:значение текущей инФормации о взаимном положении судов, отключая от индикаторного блока другие источники информацииВ полукомплекте принимающего судна подключение блока 28 памяти к индикаторному блоку 29, а также отключение от последнего блока 60 осуществляется контактами реле 25.Управление работой реле 25 производится пороговым устройством 24, которое срабатывает от сигнала о расстоянии между судами, поступающего с блока 60 разделения.Сканирование головки наведения по заданной программе с целью поиска, захвата источника 69 света принимающего полукомплекта производится сигналами программного блока 70 поиска, которые поступают в устройства 8 и 15.Формула, йзобретенцяСистема определения параметроввзаимного положения судов при траверзной передаче груза в море находу, содержащая устройство измеренйя расстояния между судами,взаимного продольного смещения судов,вертикального отключения мерной линииот перпендикуляра к диаметральнойплоскости раэгружаемого судна, датчики качки взаимодействующих судов,соединенные с суммирующим блоком,выходы которого связаны с индикаторными блоками, о т л и ч а ю щ а я -с я тем, что,с целью повышения надежности системы, она снабжена установленными на обоих судах и подключен-,ными к выходам устройств Измерениярасстояния между судами пороговымиустройствами с реле на их выходах иблоками памяти включенными через контакты реле пороговых устройств в цепьсвязи суммирующего и индикаторныхблоков.Источники информации,принятые во внимание при экспертизе1. Авторское свидетельство СССРР 428978, кл. В 63 В 27/18, 05.04.71.727512 ставитель Г. Корнев хред О.Легеза Со аольшакова Те Корректор МВигула Редактор илиал ППП Патент, г, Ужгород, Ул. Проектная, 4 Заказ 1055/17 Тираж 497 ЦНИИПИ Государственного к по делам изобретений и 113035, Москва, Ж, Раушская
СмотретьЗаявка
2026992, 27.05.1974
ПРЕДПРИЯТИЕ ПЯ А-1097
ЗАВИРУХО ВИТАЛИЙ ДМИТРИЕВИЧ, ДЕМИДОВИЧ ВЛАДИМИР НИКОЛАЕВИЧ, ПАВЛОВ ЕВГЕНИЙ МИХАЙЛОВИЧ
МПК / Метки
МПК: B63B 27/18
Метки: взаимного, груза, море, параметров, передаче, положения, судов, траверзной, ходу
Опубликовано: 15.04.1980
Код ссылки
<a href="https://patents.su/5-727512-sistema-opredeleniya-parametrov-vzaimnogo-polozheniya-sudov-pri-traverznojj-peredache-gruza-v-more-na-khodu.html" target="_blank" rel="follow" title="База патентов СССР">Система определения параметров взаимного положения судов при траверзной передаче груза в море на ходу</a>
Устройство для передачи груза между судами в море

Номер патента: 552237
Опубликовано: 30.03.1977
Авторы: Веселков, Заец, Полищук, Резчик, Стернин, Хононов
МПК: B63B 27/10
Метки: груза, между, море, передачи, судами
...и на опускание груза связаны соответственно со входами элементов ИЛИ 10, 11, вьторых подключены через задающийраспределительному механизму 13,ющему гидроцилиндром 5. Датчикиремещений представляют собой, например, акселерометры.Устройство работает следующим образом.При наличии колебаний нока стрелы крана, вызванных качкой передающего судна и сложными перемещениями принимающего судна, состоящими из вертикальных, продольных и поперечно-горизонтальных составляющих, на выходе датчиков 7 и 8 будут вырабатываться аналоговые сигналы соответствующих знаков (+ или - ) и амплитуд, которые поступают на вход формирователя 9 сигналов, где они суммируются, усиливаются и подвергаются дискретизации с формированием сигнала прямоугольной формы,...
Устройство для передачи грузов между судами

Номер патента: 439438
Опубликовано: 15.08.1974
Авторы: Бородин, Касьянов, Маслов, Рогулин, Тимошенко
МПК: B63B 27/22
Метки: грузов, между, передачи, судами
...суда,пйраллельпым к рсом, сб;1 ИРкаотся нй рстояние, близкое к рабочему, и уравпивсвою скорость. За борт судна снабжения оЗО скают гндродипампческос сопротивлениеприкрепленное к свободному концу несущего каната 1, и, стравливая несущий канат через стопор 6, выводят гидродинамическое сопротивление в положение подводного буксирования. После этого несущий канат фиксируют стопором 6 Суда сходятся на расстояние мень. ше рабочего, и на принимающем судне в точке 2 крепится поданный с судна снабжения конец несущего каната. После закрепления конца несущего каната на принимающем судне слабину в несущем канате выбирают за счет отпускания стопора 6, так как под воздействием буксируемого гидродинамического сопротивления несущий канат...
Устройство для передачи грузов между судами на ходу

Номер патента: 455038
Опубликовано: 30.12.1974
Авторы: Борщевский, Касьянов, Маслов, Тимошенко
МПК: B63B 27/22
Метки: грузов, между, передачи, судами, ходу
...не позволяет производить тр редачу грузов между судном бо измещения и малым судном, та случае на волнении моря возника опоркидывация малого судна.Цель изобретения - упроще ции устройства, снижение его сто 11 455038стоянии телонапример пидродинамическое крыло или систему крыльев, обеспечивающее постоянное усилие натяжения рабочего каната 1 необходимое для поддержания подвешенного груза,Устройство работает следующим образом.При передаче грузов траверзным способом суда, идя параллельным курсом, сближаются на необходимое расстояние и уравнивают свою скорость. Конец поданного с иередающего судна рабочего каната 1 пропускают через каиатный стопор 4 и через блок 3, после чего, зажав канат 1 стопором 4, к свободному концу каната крепят...
Устройство для передачи груза между судами в море

Номер патента: 543545
Опубликовано: 25.01.1977
Авторы: Полищук, Резчик, Стернин, Хононов
МПК: B63B 27/08
Метки: груза, между, море, передачи, судами
...13 вырабатывают сигналы, пропорциональные продольным перемещениямточек, расположенных в носовой и кормовойчастях палубы принимающего судна 22,Описанное устройство для передачи груза Лмежду ошвартованными судами в море работает следующим образом,При вертикальных перемещениях палубыпоинимаюшего судна 22 и соответственногибких связей 11, 12 и 13 все три тахогенеЮратора 5, 6 и 7 вырабатывают сигналы одинаковой э,д.с. и полярности, которые поступают на вход логических элементов И-НЕ 14и ИЛИ-НЕ 15, При такой комбинации сигналов формирователь 16 выдает управляютсигнал, который, пройдя интегратор 17, усилитель 18 и задатчик 19, воздействует нараспределительный механизм 20. Последнийсрабатывая, направляет рабочую жидкость,в ту или ичую полость...
Устройство для передачи грузов между передающим и принимающим судами

Номер патента: 592664
Опубликовано: 15.02.1978
Автор: Седов
МПК: B63B 27/08
Метки: грузов, между, передачи, передающим, принимающим, судами
...новый канат 34 с подвешенным грузом 35,Устройство работает следующим образом.После закрепления конца каната 2 за палубу 3 принимающего судна включается на выбирание каната 2 приводной двигатель 7. После выборки слабины и намотки заданного числа витков каната 2 на барабан автоматическис помощью конечного выключателя (на черт.не показано) отключается двигатель 7, накладывается тормозной шкив 5 и освобождаетсятормозная муфта 13, Дальнейшее движениебарабана 1 в ту или другую сторону происходит под действием палубы 3 принимающегосудна и гидромотора 15 с гидроаккумулятором 16. Когда палуба 3 при качке идет вниз,барабан 1 .вращается в сторону травления каната 2; когда палуба принимающего судна прикачке идет вверх гидромотор 15 с...
Предыдущий патент: Водонепроницаемое уплотнение проема платформы судового подъемника
Следующий патент: Судно для сбора нефти с поверхности воды
Случайный патент: Устройство для поворота транспортируемых предметов