Привод ножа режущего аппарата
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
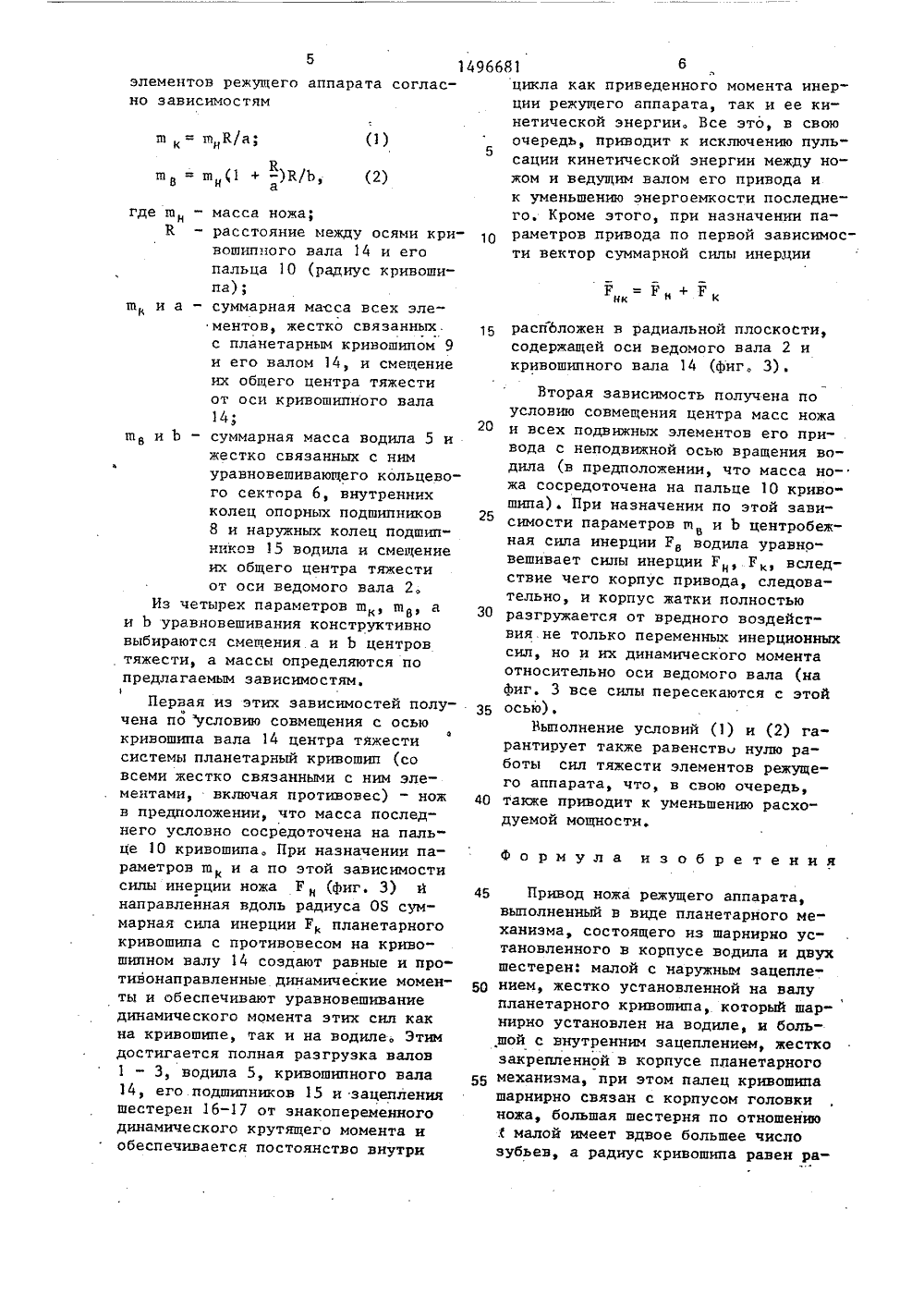
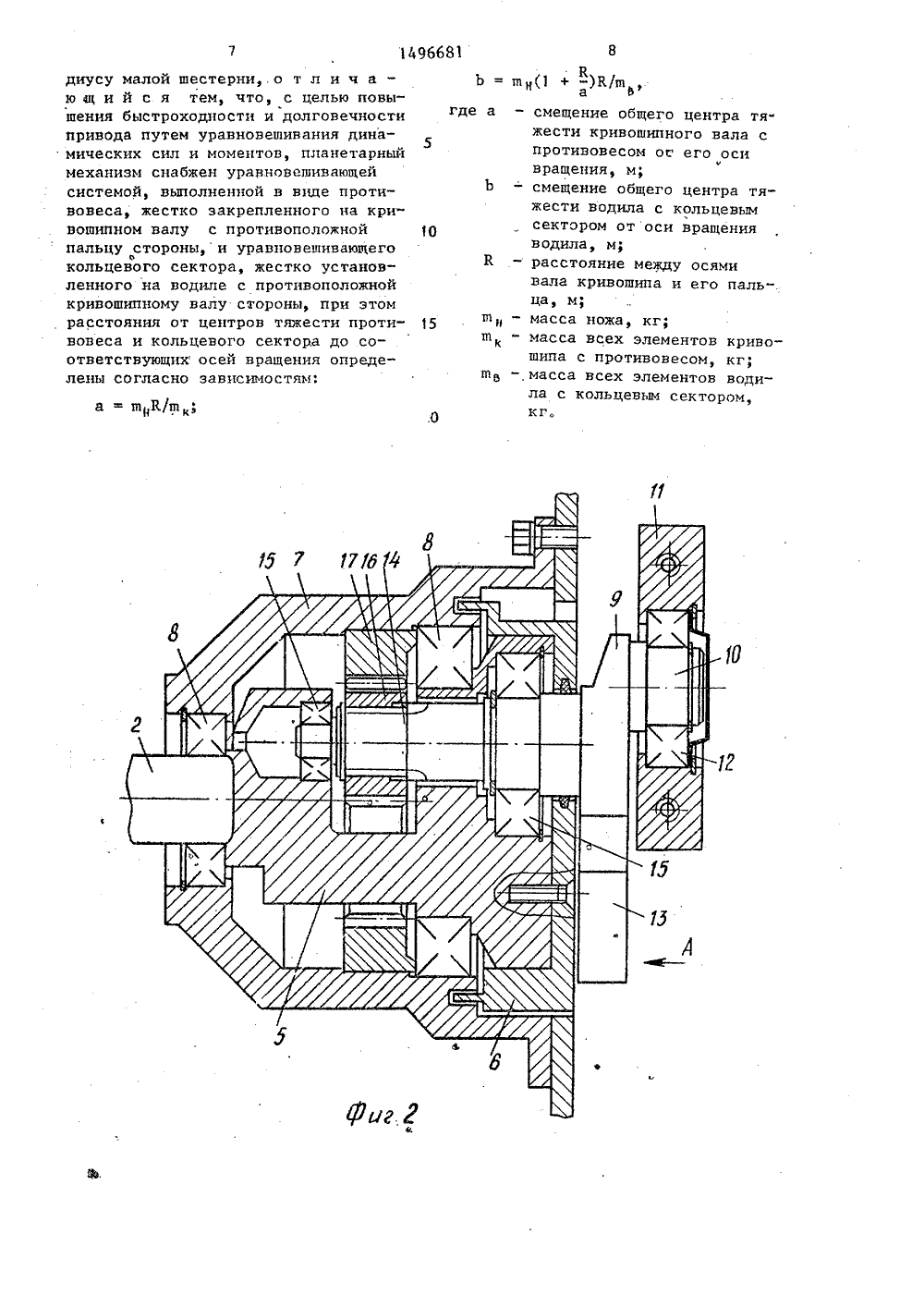
ОЮЗ СОЕЕТСНИХ ЦИАЛИСТИЧЕСН ИХСПУБЛИН(19) О 1) 1) 4 А 01 1) 34/30 1 ЛИ 1:.13 М 3М 1 Б)тгО ;1:;ЮИ с" "/:) 1;:. Д ОПИСАНИЕ ИЗОБРЕТЕНК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ етельс 1) 34/3 ОСУДАРСТВЕННЫЙ НОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТНРЫТИЯМПРИ ГННТ СССР(71) Ереванский политехнический институт им. К. Маркса, Научно-производственное объединение по сельскохозяйственному машиностроению "ВИСХОМ" и Бердянское производственноеобъединение по жаткам(56) Авторское свид тво СССР,У 128677, кл. А 01 О, 1959. 4) ПРИВОД НОЖА РЕЖУЩЕГО АППАРА(57) Изобретение относится к сельскохозяйственному машийостроению, вчастности к режущим аппаратам уборочных сельскохозяйственных машин.Цель изобретения - повышение быстроходности и долговечности привода путем уравновешивания динамических сили моментов. Режущий аппарат содержит двойной универсальный шарнир ссоосно установленными ведущим 1 иведомым 2 валами, связанными междусобой промежуточным валом 3 с вилками 4, расположенными в одной плоскости. Водило 5 жестко связано с ве3 149668 домым валом 2 и кольцевым уравновешивающим сектором 6 и шарнирно установлено в корпусе 7 посредством опорных подшипников 8. Планетарный кривошип 9 с пальцем 10 шарнирно связан с корпусом головкиножа посредством подшипников 12 и снабжен противове" сом 13, жестко установленным на кривошипе. Кривошипный вал установлен в подшипниках водила ведомого вала и несет жестко установленную на нем малую шестерню 16, обкатывающуюся внутри зубчатого венца большой шестерни 17. Сектор 6 и корпус 7 вы полцены соответственно с кольцевыми выступами и канавками, образующими 1 4лабиринт. Ход Ь ножа, радиус К криво- шипа и радиусы начальных окружностей шестерни 16 и большой шестерни 17 связаны равенствами: Ь = 4 К = 4 К1 б2 К . При работе данного привода равномерное вращение вала 1 передается валу 2 и водилу 5. Шестерня 16, ведомая водилом и вщаимодействующая с шестерней 17, передает кривошип- ному валу 14 равномерное вращение относительно вращающегося водила 5. При этом уравновешивающие элементы механизма обеспечивают разгрузку элементов привода от динамических реакций, уменьшают виброактивность и энергоемкость привода. 3 ил.Изобретение относится к сельскохозяйственному машиностроению, в частности к режущим аппаратам уборочных сельскохозяйственных машин.Целью изобретения является повышение быстроходности и долговечности привода ножа путем уравновешивания динамических сил и моментов.На фиг. 1 представлена.кинематическая схема привода ножа; на фиг. 2 - планетарный механизм с планетарнь 1 м кривошипом; на фиг. 3 - вид А на фиг. 2 с инерционными силами.Привод ножа режущего аппарата содержит двойной универсальный шарнир с соосно установлеиными ведущим 1 и ведомым 2 валами, связанными между собой посредством.промежуточ" ного вала 3 с вилками 4, расположенными в одной плоскости, водило 5, жестко связанное с ведомым валом и кольцевым уравновешивающим сектором 6 и поворотно установленное в корпу" се,7 посредством опорных подшипников 8, и планетарный кривошип 9 с пальцем 10, шарнирно связанным с корпусом 11 головки ножа посредством подшипника 12, и противовес 13, жестко установленный на кривошипе,Кривошипный вал 14 установлен в подшипниках 15 водила параллельно ведомому валу 2 и несет жестко установленную на нем малую шестерню 16, обкатывающуюся внутри зубчатого венца, большой шестерни 17., жестко установленной в корпусе 7 соосно подшипникам 8. Кольцевой сектор 6 и корпус 7 выполнены соответственно скольцевыми выступами.и канавками, образующими лабиринт, предотвращающий загрязнение.Ход Ь ножа, радиус К кривошипаи радиусы начальных окружностей ма-.лой 16 и большой 17 шестерен связаны равенствами30Ь = 4 К = 4 К 16 - 2 К 1,Режущий аппарат работает следующим образом.35Равномерное вращение ведущего вала 1 с частотой двойных ходов ножа посредством двойного универсального шарнира передается ведомому валу 2 и 40 водилу 5. Шестерня 16, ведомая водилом и взаимодействующая с шестер" ней 17, передает кривошипному валу 14 равномерное вращение в подшипниках 15 относительно вращающегося водила.При этОм В силу принятых соотношений (К,= 2 Р -" 2 К) угловая скорость кривошипа 9 равна и противоположно направлена угловой скорости водила 5, а центр пальца 10 кривошипа совместно с корпусом 11 головки ножа движется возвратно-поступательно и обеспечивает ход Ь = 4 К последнего.Массы подвижных относительно корпуса частей привода ножа и расположение их центров тяжести устанавливаются по условию полного уравновешивания динамических сил и моментов(2) 45 50 55 элементов режущего аппарата согласно зависимостям где щ - масса ножа;К - расстояние между осями кривошипного вала 14 и егопальца 10 (радиус кривошипа);щ и а - суммарная масса всех элекментов, жестко связанных.с планетарным кривошипом 9и его валом 14, и смещениеих общего центра тяжестиот оси кривошипного вала14;щв и Ъ - суммарная масса водила 5 ижестко связанных с нимуравновешивающего кольцевого сектора 6, внутреннихколец опорных подшипников8 и наружных колец подшипников 15 водила и смещениеих общего центра тяжестиот оси ведомого вала 2.Из четырех параметров шк, щв, а и Ъ уравновешивания конструктивно выбираются смещения а и Ь центров тяжести, а массы определяются по предлагаемым зависимостям.Первая из этих зависимостей получена по условию совмещения с осью кривошипа вала 14 центра тяжести системы планетарный кривошип (со всеми жестко связанными с ним элементами, включая противовес) - нож в предположении, что масса последнего условно сосредоточена на пальце 10 кривошипа. При назначении параметров тпк и а по этой зависимости силы инерции ножа Р н (фиг. 3) й направленная вдоль радиуса ОБ суммарная сила инерции Р планетарного кривошипа с противовесом на кривошипном валу 14 создают равные и противонаправленные динамические моменты и обеспечивают уравновешивание динамического момента этих сил как на кривошипе, так и на водиле. Этим достигается полная разгрузка валов 1 - 3, водила 5, кривошипного вала 14, его подшипников 15 и зацепления шестерен 16-17 от энакопеременного динамического крутящего момента и обеспечивается постоянство внутри 15 20 25 30 35 40 цикла как приведенного момента инерции режущего аппарата, так и ее кинетической энергии, Все это, в своюочередь, приводит к исключению пульсации кинетической энергии между ножом и ведущим валом его привода ик уменьшению энергоемкости последнего. Кроме этого, при назначении параметров привода по первой зависимости вектор суммарной силы инерции расположен в радиальной плоскости,содержащей оси ведомого вала 2 икривошипного вала 14 (фиг, 3).Вторая зависимость получена поусловию совмещения центра масс ножаи всех подвижных элементов его привода с неподвижной осью вращения водила (в предположении, что масса ножа сосредоточена на пальце 10 криво"шипа). При назначении по этой зави"симости параметров щв и Ь центробежная сила инерции Р водила уравновешивает силы инерции Ги, Г, вследствие чего корпус привода, следовательно, и корпус жатки полностьюразгружается от вредного воздейст"вия.не только переменных инерционныхсил, но и их динамического моментаотносительно оси ведомого вала (нафиг. 3 все силы пересекаются с этойосью),Выполнение условий (1) и (2) гарантирует также равенство нулю работы сил тяжести элементов режущего аппарата, что, в свою очередь,также приводит к уменьшению расходуемой мощности,Формула изобретения Привод ножа режущего аппарата, выполненный в виде планетарного механизма, состоящего из шарнирно установленного в корпусе водила и двух шестерен: малой с наружным зацеплением, жестко установленной на валу планетарного кривошипа, который шарнирно установлен на водиле, и большой с внутренним зацеплением, жесткозакрепленной в корпусе планетарного механизма, при этом палец кривошнпа шарнирно связан с корпусом головкиножа, большая шестерня по отношению,т малой имеет вдвое большее числозубьев, а радиус кривошипа равен ра1496 б 81 Ь = ш(1 + -)К/шК а где а 15 яш а = шЕ/ш; диусу малой шестерни, о т л и ч а - ю щ и й с я тем, что, с целью повыщения быстроходности и долговечности привода путем уравновешивания динамических сил и моментов, планетарный механизм снабжен уравновешивающей системой, выполненной в виде противовеса, жестко закрепленного на кри" вошипном валу с противоположной пальцу стороны, и уравновешивающеговкольцевого сектора, жестко установленного на водиле с противоположной кривошипному валу стороны, при этом расстояния от центров тяжести противовеса и кольцевого сектора до соответствующих осей вращения определены согласно зависимостям:- смещение общего центра тя"жести кривошипного вала спротивовесом ог его осивращения, м;смещение общего центра тяжести водила с кольцевымсектором от оси вращенияводила, м;- расстояние между осямивала кривошипа и его паль-.ца, м;- масса ножа, кг;- масса всех элементов кривошипа с противовесом, кг;в ,масса всех элементов водила с кольцевым сектором,кг,1 496681 Вид,У фиг. Составитель И. Козловедактор О. Спесивых Техред М.Дидык Корректор оиэводственно-издательский комбинат "Патент", г. Ужгор л. Гагарина, 101 Заказ 4346/2ВНИИПИ Государственного коми113035, Моск ираж 621 Подписноеета по изобретениям и открытиям при ГКНТ СССР а, Ж, Раушская наб д. 4/5
СмотретьЗаявка
4316372, 31.08.1987
ЕРЕВАНСКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. К. МАРКСА, НАУЧНО-ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ ПО СЕЛЬСКОХОЗЯЙСТВЕННОМУ МАШИНОСТРОЕНИЮ "ВИСХОМ", БЕРДЯНСКОЕ ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ ПО ЖАТКАМ, Г. БЕРДЯНСК
ДЖАВАХЯН РАЗМИК ПАТВАКАНОВИЧ, АВДЕЕВ АРКАДИЙ ВИКТОРОВИЧ, ВОРОБЬЕВ ВИКТОР КОНСТАНТИНОВИЧ, КУДИНОВ ФЕОДОР ФЕОДОРОВИЧ, АРТЮХИН ВЛАДИМИР ФОМИЧ, АКОПДЖАНЯН ЗАВЕН АРАРАТОВИЧ, КАВТОРИН СЕРГЕЙ ВАСИЛЬЕВИЧ, ГАСПАРЯН КАРЕН ВОЛОДЯЕВИЧ
МПК / Метки
МПК: A01D 34/30
Метки: аппарата, ножа, привод, режущего
Опубликовано: 30.07.1989
Код ссылки
<a href="https://patents.su/5-1496681-privod-nozha-rezhushhego-apparata.html" target="_blank" rel="follow" title="База патентов СССР">Привод ножа режущего аппарата</a>
Механизм двухскоростного привода вала отбора мощности сельскохозяйственного трактора

Номер патента: 523816
Опубликовано: 05.08.1976
Авторы: Подкидыш, Стецко, Стринадко, Трофимович
МПК: B60K 17/28
Метки: вала, двухскоростного, механизм, мощности, отбора, привода, сельскохозяйственного, трактора
...2 связана с водилом 3 и солнечной шестерней 4.Водило 3 жестко связано с валом 5 отбора,мощности и барабаном 6 гормоза 7, Солнечная шестерня 4 жестко связана с барабаном 8 тормоза 9, а через зубчатый венец,осуществляется рычагом управления 13,Работает механизм следующим образом.Крутящий момент от двигателя поступаегна шестерню 1. Если рычаг 13 находитсяв нейтральном положении 1, то крутящиймомент на валы 5 и 12 не передается,При нахождении рычага управления 13 вположении /7 тормоз 7 удерживает от вращения водило Э и жестко связанный с нимвал 5 отбора мощности, Крутящий момент, Лакида,ович ррект з 4938 392 ЦИНИПИ Государст ИО, дела 113035, Москва, Тираж 901енного комитет изобретений 35, Раушска Подписноеовета Министров СССкрытийб., д. 4/5...
Механизм переключения привода вязального вала и игольчатого привода пресса для тюков

Номер патента: 969198
Опубликовано: 30.10.1982
МПК: A01D 59/00
Метки: вала, вязального, игольчатого, механизм, переключения, пресса, привода, тюков
...начало с началом уплотнения материала, а конец с прохождением поводка под роликом заделки. Пределы поворота рычага запырающей планки, снабженного роликом, рассчитаны так, чтобы они превышали толщину сегмента запирающей планки и прилегающего ролика.Такая компоновка дает ту выгоду, что ролик рычага запирающей планки после прохождения мимо сегмента запирающей планки, снабженной наклонной набегания, освобождает зацепление поворотом в сторону стопора переключения и в результате этого поворота попадает во внутреннюю часть сегмента запирающей планки. Для последующего рабочего оборота вязального вала в любом случае обеспечено четкое зацепление. Предотвращаются остановка игл в прессовальном канале и происходящее за этим разрушение, включая...
Механизм привода вращения валов с гибкой передачей

Номер патента: 181935
Опубликовано: 01.01.1966
МПК: F16H 7/02, F16H 7/04, F16H 7/06
Метки: валов, вращения, гибкой, механизм, передачей, привода
...валов и угла между осями вапе пр ло исываемого испособлес ведущит у 1 установлен соединен повод 4, при этом оси и пальца, и пов ия вокруг оси п палец 2, с ок 3, снаб-, цапф пердок может альца. На фиг. 1 изображена схема опмеханизма; на фиг. 2 - схема пния, соединяющего ведущий шкиввалом.На ведущем валкоторым шарнирноженный цапфамипендикулярны к оссовершать колебан г;,Ведущий шкив 5 смонтирован в подшипни-ках б, которые крепятся к станине 7, и шарнирно соединен с поводком 3, связывающимего через палец 2 с ведущим валом 1. Веду 5 щий шкив может также совершать колебаниявокруг оси цапф поводка,На ведомом валу 8 жестко крепится ведомый шкив 9, связанный с ведущим шкивом 5ременной передачей 10.10 При вращении вала 1 палец 2...
Колесная пара с валом тягового привода для железнодорожного локомотива

Номер патента: 458474
Опубликовано: 30.01.1975
Авторы: Бондаренко, Забродин, Каменев, Крузе, Нестрахов, Никишин, Решетов, Суржин, Шацилло
МПК: B61C 9/44
Метки: валом, железнодорожного, колесная, локомотива, пара, привода, тягового
...вала привода.Цель изобретения - обеспечение свободного перемещения колесной пары во всех направлениях относительно вала тягового при вода,Это достигается тем, чт раженная со стороны колеса, на т Трехповодковая муфта состоит из шести пальцев 4 и трех тяг 5. Оси пальцев расположены параллельно оси колесной пары. Три пальца равномерно расположены на окружности заданного диаметра и впрессованы в отверстия трубы вала, а остальные три также расположены равномерно на окружности такого же диаметра, но впрессованы в отверстия ступицы колеса. Пальцы, расположенные на трубе вала и ступице колеса, попарно между собой соединены тягами, в проушины которых впрессованы шарниры 6. Тяги, шарнирно- соединенные с пальцами, обеспечивают свободное во...
Магнитная муфта для привода вертикального вала герметичного аппарата

Номер патента: 635569
Опубликовано: 30.11.1978
Авторы: Андреев, Бобоедов, Веруга, Кондрашов, Сигов
МПК: H02K 49/04
Метки: аппарата, вала, вертикального, герметичного, магнитная, муфта, привода
...2, жестко соединенную с валом 7 в осевом направлении. Герметизированцый вал 7 установлен на радиальных подшипниковых опорах 8 и 9. Одна из опор 8 находится в верхней части экрана 5 и герметизируется съемной крышкой 10. Другая опора 9 размещена в съемном стакане 11 на днище аппарата и герметизируется также съемной крышкой 12. Опоры 8 и 9 снабжены фиксирующими фланцами 13, размещенными с наружной стороны муфты. Концы герметизированного вала 7 снабжены хвостовиками 14, имеющими, например, конусную форму, для установки на них удлинителей 15 для радиальной фиксации вала 7 с внутренней полумуфтой 2 в рабочем положении. Сочленение вала 7 с удлинителем 15 может быть осуществлено также с помощью разъемного соединения, выполненного на...
Предыдущий патент: Привод двухножевого режущего аппарата уборочной машины
Следующий патент: Привод ножа режущего аппарата
Случайный патент: Установка для изготовления полимерных изделий