Стенд для усталостных испытаний цепных передач
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
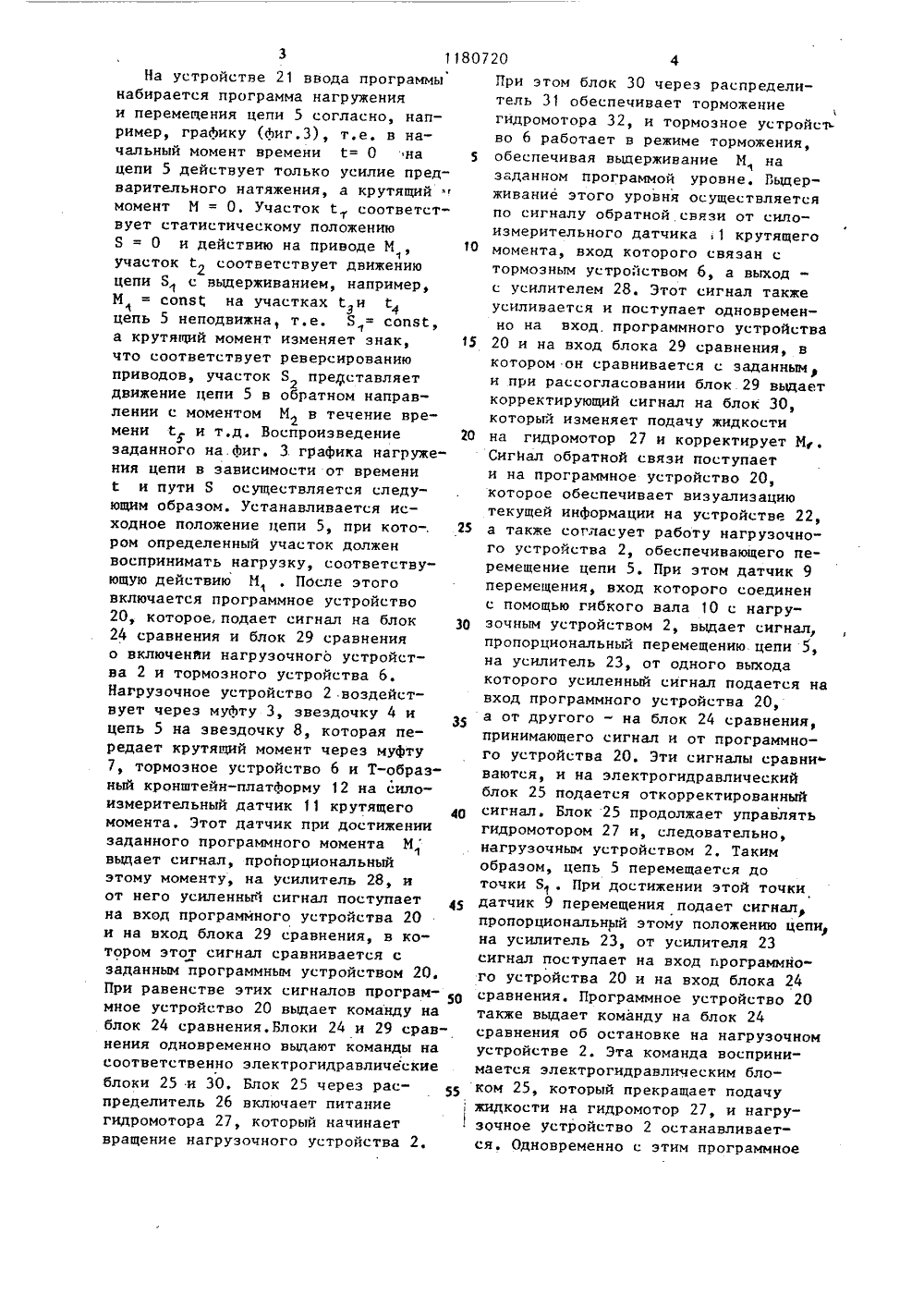
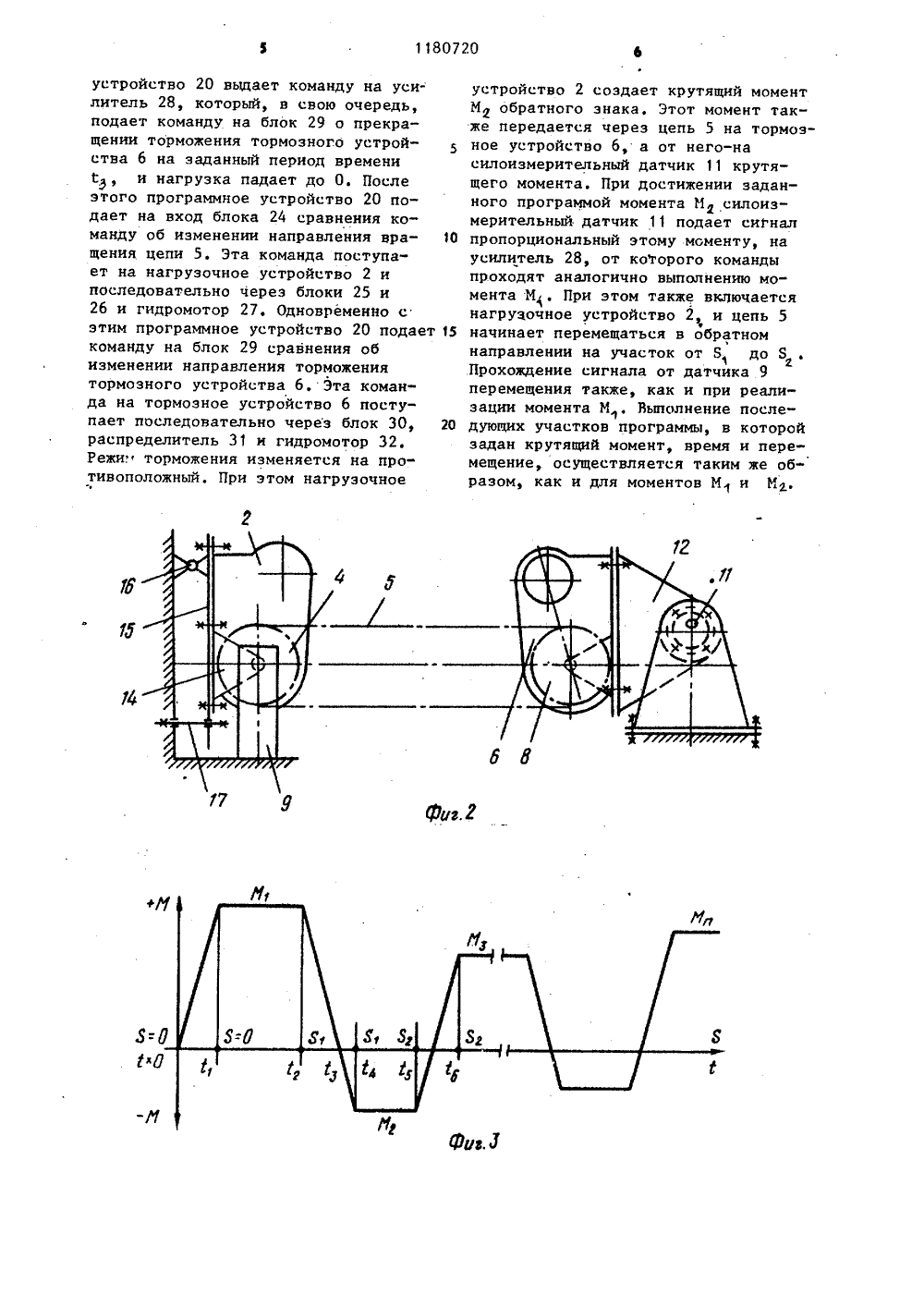
(5)4 С 01 И 13/ ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТИЙОПИСАНИЕ ИЗОБРЕТЕНК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ юл. Рф 35в и И.В.Иаповал,801180720 станину, нагрузочное и тормозноеустройства, установленные на платформах, шарнирно связанных со станиной, .закрепленные на валах нагрузочногои тормозного устройств звездочки,предназначенные под испытуемую цепь,силоизмерительный датчик, связанныйсо станиной и с платформой, о тл и ч а ю щ и й с я тем, чтосцелью приближения условий и 1.пытанийк эксплуатационным, стенд снабжендатчиком перемещения цепи, связаннымс валом нагруэочного устройства, двумя следящими системами, одна из которых соединена с датчиком перемещенияцепи, а другая - с силоиэмерительнымдатчиком, и соединяющим их междусобой программным устройством.2. Стенд по и. 1, о т л и ч а - ю щ и й с я тем, что нагрузочное и тормозное устройства представляют собой реверсивные гидромоторч,11807 03, Стенд по п.1, о т л и ч аю щ и й с я тем, что силоизмеритель ный датчик выполнен в виде торсионного элемента.1Изобретение относится к испытательной технике и может быть использованодля усталостных испытаний цепных пере-,дач,Пель изобретения - приближение условий испытаний к эксплуатационным.На фиг, 1 показана схема стенда,план; на фиг. 2 - вид А на фиг. 1;на фиг. 3 - график примерной реализуемоч программы стенда; на фиг, 4 - 10блок-схема автоматической системыуправления стендом.Стенд состоит из основания 1, накотором установлены нагрузочноеустройство 2, соединенное через,муфту 3 с валом ведущей звездочки 4,испытываемой цепи 5, тормозногоустройства 6, соединенного черезмуфту 7 с ведомой звездочкой 8,датчика 9 перемещения, соединенного через гибкий вал 10 со звездочкой 4, силоизмерительного датчика 11 крутящего момента, соединенного через Т-образный кронштейнплатформу 12 со станиной тормозногоустройства 6 и автоматической системы 13 управления,Нагрузочное устройство 2 вместес корпусом 14 ведущей звездочки 4закреплено на единой базе - платформе 15, установленной на шарнирах16 и на регулируемых тягах 17.Нагрузочное 2 и тормозное бустройства представляют собой ревер"сивные гидромоторы, а еилоизмери- З 5тельный датчик 11 выполнен в видеторсионного элемента.Система 13 автоматического управления состоит из двух следящихсистем (фиг,4), обозначенных общими 40позициями 18 и 19, программногоустройства 20 с устройством 21 вводапрограммы и. устройством 22 отображения информации,Первая следящая система 18 состоиМ 5из последовательно соединенных уси 2лителя 23, блока 24 сравнения, электрогидравлического .блока 25, распре-, делителя 26, гидромотора 27 и нагрузочного устройства 2. При этом один вход системы соединен с датчиком 9 перемещения, а другой командный вход соединен с выходом программного устройства 20. Таким образом, образуется система задания перемещения любой величины, вводимой в эту систему от программного устройства 20.Вторая следящая система 19 состоит из последовательно соединенных усилителя 28,блока 29 сравнения,электрогидравлического блока 30, распределителя 31, гидромотора 32 и тормозного устройства 6. При этом один вход этой системы соединен с силоизмерительным датчиком 11 крутящего момента, а другой командный вход соединен с другим выходом программного устройства 20. Таким образом, образуется система задания крутящего момента любой величины, вводимой в эту систему от программного устройс".тва 20Стенд работает следующим образом,Рассмотрим реализацию программы изменения нагрузок в зависимости от перемещения цепи.На фиг. 3 обозначены:М " крутящий момент на силоиз 1мерительном датчике 11;Я, - величина перемещения. цепи 5;,С - время перемещения цепи 5;Вначале производится установка нагрузочного 2 и тормозного 6 уст" ройств, звездочек 4 и 8 и их корпусов 14, цепи 5, датчиков 9 и 11, С помощью регулируемых тяг 17 про" изводят напряжение цепи 5, при этом платформа 15 поворачивается относительно шарниров 16, обеспечивая требуемое натяжение цепи 5, после которого тяги 17 фиксируются, например, контргайками.15 55 3 1180На устройстве 21 ввода программынабирается программа нагруженияи перемещения цепи 5 согласно, например, графику (фиг.3), т.е. в начальный момент времени С= 0 на 5цепи 5 действует только усилие предварительного натяжения, а крутящиймомент И = О. Участок Ст соответствует статистическому положениюЯ = 0 и действию на приводе М 10участок С соответствует движейиюцепи Я с вьдерживанием, например,М = сопзС на Участках С ицепь 5 неподвижна, т.е. Я = сопзСУа крутящий момент изменяет знак,что соответствует реверсированиюприводов, участок Я представляет2движение цепи 5 в обратном направлении с моментом М 2 в течение времени С и т,д. Восйроизведение20заданного на.фиг. 3. гРафика нагруже"ния цепи в зависимости от времении пути Я осуществляется следующим образом. Устанавливается исходное положение цепи 5, при кото-. 25ром определенный участок долженвоспринимать нагрузку, соответствующую действию М . После этоговключается программное устройство20, которое, подает сигнал на блок24 сравнения и блок 29 сравненияо включении нагрузочного устройства 2 и тормозного устройства 6,Нагрузочное устройство 2 воздействует через муфту 3, звездочку 4 и35цепь 5 на звездочку 8, которая передает крутящий момент через муфту7, тормозное устройство б и Т-образный кронштейн-платформу 12 на силоизмерительный датчик 11 крутящегомомента, Этот датчик при достижениизаданного программного момента Мвьдает сигнал, пропорциональныйэтому моменту, на усилитель 28, иот него усиленный сигнал поступаетна вход программного устройства 20и на вход блока 29 сравнения, в котором этот сигнал сравнивается сзаданным программным устройством 20.При равенстве этих сигналов програм 50мное устройство 20 вьдает команду наблок 24 сравнения. Блоки 24 и 29 сравнения одновременно выдают команды насоответственно электрогидравлическиеблоки 25 и 30. Блок 25 через распределитель 26 включает питаниегидромотора 27, который начинаетвращение нагрузочного устройства 2. 720При этом блок 30 через распределитель 31 обеспечивает торможение гидромотора 32, и тормозное устройст во б работает в режиме торможения, обеспечивая выдерживание М на заданном программой уровне. Вьдерживание этого уровня осуществляется по сигналу обратной связи от силоизмерительного датчика 1 крутящего момента, вход которого связан с тормозным устройством 6, а выходс усилителем 28. Этот сигнал также усиливается и поступает одновременно на вход, программного устройства 20 и на вход блока 29 сравнения, в котором он сравнивается с заданным Ф и при рассогласовании блок 29 вьдает корректирующий сигнал на блок 30, которьгй изменяет подачу жидкости на гидромотор 27 и корректирует Мр. Сигнал обратной связи поступает и на программное устройство 20, которое обеспечивает визуализацию текущей информации на устройстве 22, а также согласует работу нагрузочного устройства 2, обеспечивающего перемещение цепи 5. При этом датчик 9 перемещения, вход которого соединен с помощью гибкого вала 10 с нагрузочным устройством 2, вьдает сигнал, пропорциональньгй перемещению. цепи 5, на усилитель 23, от одного выхода которого усиленный сигнал подается на вход программного устройства 20, а от другого - на блок 24 сравнения, принимающего сигнал и от программного устройства 20. Эти сигналы сравни ваются, и на электрогидравлический блок 25 подается откорректированный сигнал, Блок 25 продолжает управлять гидромотором 27 и, следовательно, нагрузочным устройством 2. Таким образом, цепь 5 перемещается до точки Я . При достижении этой точки датчик 9 перемещения подает сигнал пропорциональный этому положению цепи на усилитель 23, от усилителя 23 сигнал поступает на вход программного устройства 20 и на вход блока 24 сравнения. Программное устройство 20 также выдает команду на блок 24 сравнения об остановке на нагрузочном устройстве 2. Эта команда воспринимается электрогидравлическим блоком 25, который прекращает подачу жидкости на гидромотор 27, и нагрузочное устройство 2 останавливается. Одновременно с этим программноеустройство 20 выдает команду на усилитель 28, который, в свою очередь, подает команду на блок 29 о прекращении торможения тормозного устройства 6 на заданный период времении нагрузка падает до О. После этого программное устройство 20 подает на вход блока 24 сравнения команду об изменении направления вращения цепи 5. Эта команда поступает на нагрузочное устройство 2 и последовательно через блоки 25 и 26 и гидромотор 27, Одновременно с этим программное устройство 20 подает команду на блок 29 сравнения об изменении направления торможения тормозного устройства 6. Эта команда на тормозное устройство 6 поступает последовательно через блок 30, распределитель 31 н гидромотор 32. Режи. торможения изменяется на противоположный. При этом нагрузочное устройство 2 создает крутящий моментМ 2 обратного знака. Этот момент также передается через цепь 5 на тормозное устройство 6, а от него-насилоизмерительный датчик 11 крутящего момента. При достижении заданного программой момента М силоизмерительный датчик 11 подает сигнал 10 пропорциональный этому моменту, наусилитель 28, от коТорого командыпроходят аналогично выполнению момента М. При этом также включаетсянагрузочное устройство 2 и цепь 5 15 начинает перемещаться в обратномнаправлении на участок от Б до 8аПрохождение сигнала от датчйка 9перемещения также, как и при реализации момента М, Выполнение после дующих участков программы, в которойзадан крутящий момент, время и перемещение, осуществляется таким же образом, как и для моментов М 1 и М.1180720Составитель О.КлимовПушненкова Техред М,Кузьма Корректор В.СиницкаяактЗаказ 5911/39 Тираж 896 Подписно ВНИИЛИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж, Раушская наб.," д. 4/5 й Филиал ППП "Патег, Ужгород, ул. Проектная, 4
СмотретьЗаявка
3703501, 21.12.1983
ПРЕДПРИЯТИЕ ПЯ А-3395
МУРАТОВ ВИКТОР ВАСИЛЬЕВИЧ, ШАПОВАЛ ИВАН ВЛАДИМИРОВИЧ
МПК / Метки
МПК: G01M 13/02
Метки: испытаний, передач, стенд, усталостных, цепных
Опубликовано: 23.09.1985
Код ссылки
<a href="https://patents.su/5-1180720-stend-dlya-ustalostnykh-ispytanijj-cepnykh-peredach.html" target="_blank" rel="follow" title="База патентов СССР">Стенд для усталостных испытаний цепных передач</a>
Устройство трансляции сигнала в рельсовой цепи

Номер патента: 1041377
Опубликовано: 15.09.1983
Авторы: Козлов, Кравцов, Сироткин, Степенский, Сурменков
МПК: B61L 23/16
Метки: рельсовой, сигнала, трансляции, цепи
...накопления,связанный с входом ключа разряда, снабжено коммутирующим блоком, управляющий вход которого подключен к выходуключа разряда, а управляемый - к линиипитания, а выход соединен с входом питающего блока, при этом управляющие входыключей заряда и разряда соединены соответственно с прямым и инверсным выходамирелейного блока,На чертеже представлена блок-схема35предлагаемого устройства,Рельсовые линии 1 и 2 разделены изолирующими стыками 3 и подключены соответственно к релейному 4 и питающему 5блокам устройства трансляции 6. Прямой7 и инвесрный 8 выходы релейного блока 4 40подключены соответственно к управляющему входу 9 ключа заряда 10 и к управляющему входу 11 ключа разряда 12, Ключзаряда 10 по управляемому входу 13 соединен с...
Устройство трансляции сигнала в рельсовой цепи

Номер патента: 1276550
Опубликовано: 15.12.1986
Авторы: Аркатов, Кравцов, Мухин, Попов, Степенский
МПК: B61L 23/16
Метки: рельсовой, сигнала, трансляции, цепи
...линии 1 инверсный выход 6путевого приемника 4, воздействуяна управляющий вход 8 ключа разряда 10, обеспечивает подключение управляемого входа 12 ключа 10 разряда к управляющему входу 13 блока 3 10коммутации и к обмотке возбужденияреле 14, При этом за счет разрядаэнергии, аккумулированной в блоке 11накопления, возбуждается реле 14 фиксации, замыкается его фронтовой контакт 20 и реле 14 фиксации через выпрямитель 15 становится на самоблокировку от линии 16 через свой фронтовой контакт 20. Одновременно блок11 накопления воздействует через 20ключ 10 разряда на управляющий вход13 блока коммутации 3 на время разряда энергии блока накопления, Приэтом управляемый вход 21 блока 3 коммутации, на который через фронтовойконтакт 20 подано...
Устройство формирования сигнала отсчета для дифференциального кодера изображений

Номер патента: 906033
Опубликовано: 15.02.1982
Автор: Сергеев
МПК: H04N 7/42
Метки: дифференциального, изображений, кодера, отсчета, сигнала, формирования
...блоки9-20 вычисления модуля разности сигналов соответственно; первый, второй,третий,и четвертый сумматоры 21,22, 23 и 24 соответственно: блок 25сравнения, четыре ключевых элемента 26, 27, 28 и 29.Устройство работает следующимобразом,На вход первого блока задержки 1поступают отсЧеты видеосигнала. Свыходов всех блоков задержки 1 - 8снимаются значения отсчетов, задержанные соответственно на один такт,на (М) такт, на М тактов, на(2 И+1) такт. Пусть изображение задано квадратной сеткой отсчетов з(в,п),где в - номер отсчета в строке(по строкам) и выполнения Функциональных преобразований,в блоках9-20 на выходе первого сумматора 21имеет сигналУ 1з(в+1) и - 1) з(в)п - 1) ++з(й, и -1)-з(в, и)1 (1)на выходе второго сумматора 22у=з (в),п...
Устройство приема сигнала ответа абонента

Номер патента: 1158016
Опубликовано: 30.04.1988
Автор: Меламуд
МПК: H04M 3/02
Метки: абонента, ответа, приема, сигнала
...батареи и шину 11 вьзывного сигнала,определяют напряжение нала на входе порогов учетом допустимых отк ния на шине вызывногоном сопротивлении утечки и минимальном сопротивлении шлейфа линии, номеньше напряжения вызывного сигналана входе блока б при снятой микроте 5лефонной трубке, минимальном напряжении на шине вызывного сигнала, бесконечном сопротивлении утечки и макси"мальком сопротивлении шлейфа линии.В блоке 6 сравнивается пороговое 10напряжение с выхода делителя 5 с напряжением вызывного сигнала, прошедшимпо цепи посылки вызова.До ответа абонента в абонентскомпереключателе 1 производится периодическое подключение проводов 1 и 8шлейфа лилии к датчику 3 на время паузы между вызывными посылками или к блоку 2 на время вызывных...
Устройство формирования сигнала изображения

Номер патента: 1443204
Опубликовано: 07.12.1988
Авторы: Афанасьев, Балягин, Кириллов, Стаценко
МПК: H04N 3/14
Метки: изображения, сигнала, формирования
...первом выходе блока 3сравнения установится состояние логического нуля (фиг, бн, период ТЗ),а на втором и третьем выходах блока О 13 сравнения в момент с (фиг. б,м, о, период ТЗ) установится состояние логической единицы. На первомвыходе формирователя 18 сохранитсясостояние логического нуля (фиг.7 е, ,15 период ТЗ), на его третьем выходеустановится состояние логическойединицы (фиг. 7 б, период ТЗ), ана втором выходе формирователя 18в момент времени с (фиг. 7 в, пе риод ТЗ) установится состояние логического нуля. Напряжение на выходе первого управляемого источника14 напряжения не изменится (фиг,7 ж,период ТЗ), а напряжение на выходеЕсли в течение следующего кадра количество импульсов, поступивших на первый вход блока 13 сравнения, больше...
Предыдущий патент: Валоповоротное устройство
Следующий патент: Стенд для испытания передач
Случайный патент: Автоматическая сцепка