Способ управления процессом торможения автомобиля
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 912570
Автор: Гецович


Текст
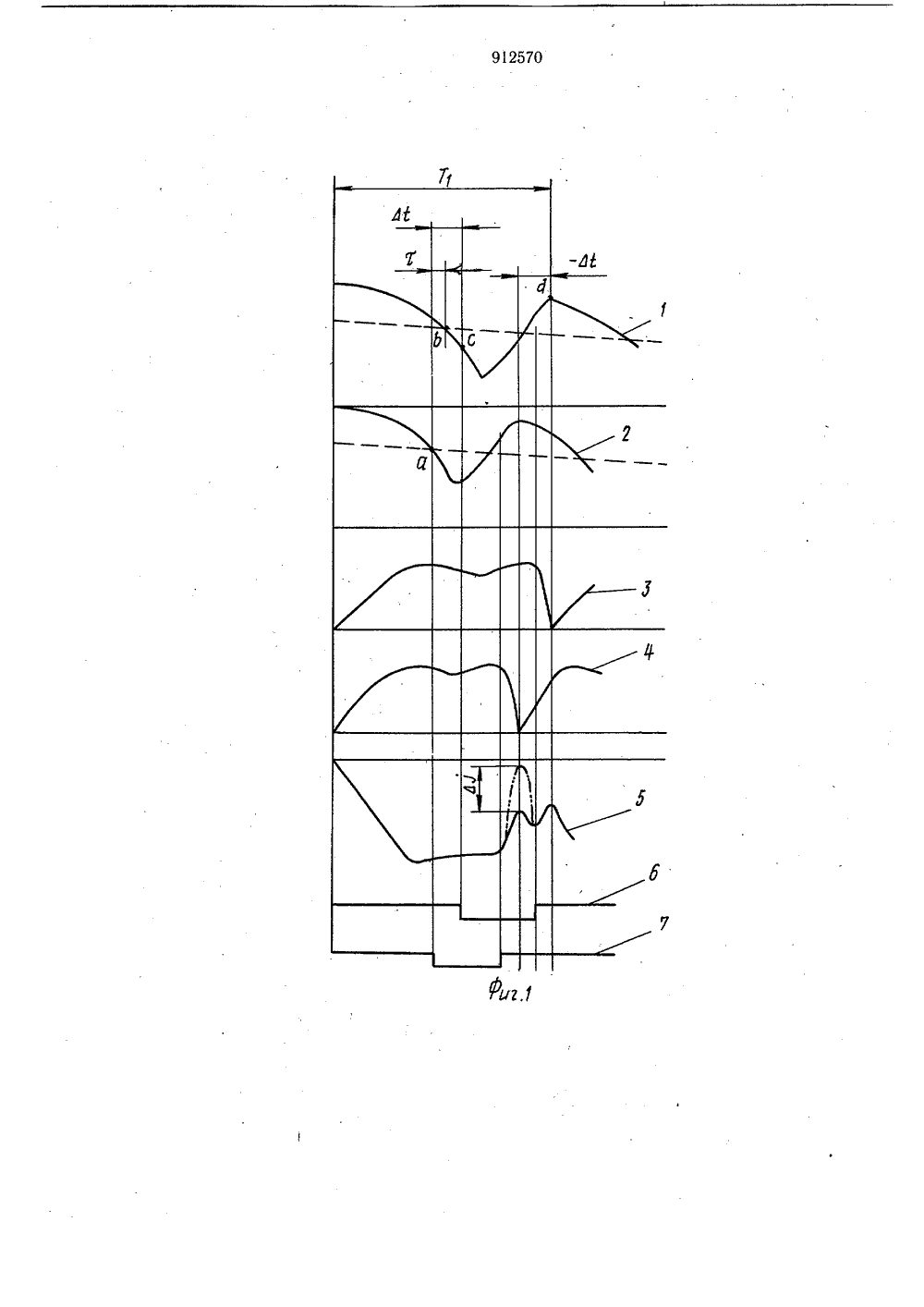
ОП И(:АНИЕ Союз Советских Социалистических Республик ТЕЛЬ СТВУ АВТОРСКОМУ 61) Дополни22) Заявленоприсоединен23) вт. свид-ву -51) МПриоритет -Опубликовано 15.03.82. БюллетеньДата опубликования описания 25.03.82 3) УДК 629.11 -59(088.8)в делам изоаретеиий и открытий. 2) Авторизобретения Гецови рьковский автомобильно-дорожный им. Комсомола Украины 1) Заявите(54) СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ ТОРМОЖЕНИЯ АВТОМОБИЛЯдостигается тем, чтрастормаживают спо отношению к наколес задней оси,задают пропорционриода процесса.ина задержки и псоотношени.ем о колеса передзадержкой во чалу расторма а величину за ально длитель Цель ней оси времени живания 15 держки ности пе Велич связаны= (0,10,4) де ЬФ держки;есса.ода измеряют на ко - величинаТ - период п Длительность и ах задней оси. Изобретение относится к способам и устройствам автоматического управления процессом торможения автомобиля, предотвращающим блокировку колес.Наиболее близким из известных технических решений является способ управления процессом торможения автомобиля, заключающийся в периодическом растормаживании колес при выявлении начавшегося их блокирования и повторном их затормаживании после разблокирования, причем растормаживание колес разноименных осей производится неодновременно 1.Однако в указанном способе промежуток времени между растормаживанием осей определяется временем переключения управляющего блока от датчика и модулятора одной оси к датчику и модулятору другой оси. Величина этого промежутка времени - 10с. Такая величина разновременности растормаживания осей не обеспечивает снижения амплитуды пульсаций суммарной тормозной силы. Увеличение же указанного промежутка времени может привести к снижению качества регулирования из-за позднего выявления блокирования и разблокирования колес. Поэтому способ не может обеспечить приемлемои комфортабельности движения при торможении, Кроме того, известный способ не предотвращает опережающего растормаживания колес передней оси и запаздывания растормаживания задней оси, что приводит к временной потере устойчивости автомобиля против заноса.Цель изоретения - повышение комфортабельности движения и устойчивости автомобиля против заноса.модулятору давления передней оси (линия 6),командного сигнала модулятору давления задней оси (линия 7) (пунктиром обозначены пороговые значения угловых скоростей колес, при достижении которых подают командный сигнал на растормаживание); на фиг. 2 - графики изменения угловых.скоростей передних и задних колес. (кривые 8 и 9) и командного сигнала модулятору дав. ления задней оси (линия 10) в течение всего процесса торможения; на фиг, 3 - уп 20 равляющие блоки передней 11 и задней 12 осей, модуляторы давления передней 13 и задней 14 осей, блок измерения длительности периода 15 и блок 16 задержки командного сигнала. ИПри торможении управляющие блоки 11 и 12 определяют момент достижения какимлибо параметром, по которому оценивается динамическое состояние колеса, порогового значения и подают командный сигнал моду-. лятором давления на растормаживание. Командные сигналы поступают в блок 16, который пропускает командный сигнал блока 12 к модулятору 14 без задержки, а командный, сигнал блока 11 - с задержкой М. Требуемая величина Ы зависит от многих параметров - коэффициентов сцепления колес с опорной поверхностью, вертикальных реакций на колесах, темпа повышения приводного давления и т. д. Учет всех этих величин значительно усложняет реализацию эф зю способа. Эти же параметры определяют дли. 40тельность цикла (период) процесса, что позволяет с достаточной точностью задавать ве-,личину Ь 1 в долях длительности периода,Коэффициент пропорциональносги между этими величинами лежит в пределах 0,1,0 4 и для различных моделей автомобилей может быть различным. Поэтому он подлежит экспериментальному определению при разработке противоблокировочной системы дляконкретной модели автомобиля. Разновременность начала блокирования колес передней и задней осей, как правило, существенно меньше, чем Ы (величина). Командные сигналы от управляющих блоСущность данного способа иллюстрируется графиками изменения параметров (фиг. 1 и 2) и блок-схемой (фиг. 3).На фиг. 1 показаны графики изменения за один цикл Т угловой скорости колес передней оси (кривая 1), угловой скорости колес задней оси (кривая,2), тормозной силы, создаваемой колесами передней оси (кривая 3), тормозной силы, создаваемой колесами задней оси (кривая 4), продольного замедления автомобиля (кривая 5),1 С командного сигнала управляющего блока ков 11 и 12 поступают к блоку 16 с разно- временностью Ъ (т. а и т. в на фиг. 1). Если растормаживание колес обеих осей начать без задержки, то тормозные силы будут снижаться на колесах практически одновременно, а замедление автомобиля будет изменяться так, как показано штрих- пунктирной линией на фиг. 1. Задержка командного сигнала по предлагаемому способу на величину И обеспечивает смешение начала растормаживания в т. с. Вследствие этого колеса передней оси достигают полного растормаживания (т, д) на величину "Ь 1 позже, чем колеса задней оси, К этому времени колеса задней оси уже находятся в стадии затормаживания, Это обеспечивает снижение амплитуды пульсации суммарной тормозной силы, что приводит к.снижению амплитуды пульсаций замедления автомобиля на величину Ь 1. Снижение амплитуды пульсаций замедления автомобиля повышает комфортабельность движения.Опережающее расторм аж ивание колес задней оси обеспечивает устойчивость автомобиля против заноса.Формула изобретения1. Способ управления процессом торможения автомобиля, заключающийся в периодическом растормаживании колес при выявлении начавшегося их блокирования и повторном их затормаживании после разблокирования, причем растормаживание колес разноименных осей производят неодновременно, отличающийся тем, что, с целью по. вышения комфортабельности движения и устойчивости автомобиля против заноса, колеса передней оси растормаживаются с задержкой во времени по отношению к началу растормаживания колес задней оси, а величину задержки задают пропорционально длительности периода процесса.2. Способ по п. 1, отличающийся тем, что величина задержки и период процесса связаны соотношениемЮ = (0,10,4)Т,где Ь -величина задержки;Т -период процесса.3. Способ по пп. 1 и 2, отличающийсятем, что длительность периода измеряют наколесах задней осиИсточники информации,принятые во внимание при экспертизе1. Патент США3905653, кл. 303/21,1975.Составитель С. Макаров едактор М, Келемеш Техред А. Бойкас Корректо аказ 1284/26 Тираж 715 Подписи ВНИИПИ Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж - 35, Раушская наб., д. 4/5 филиал ППП Патент, г, Ужгород, ул. Проектная, 4
СмотретьЗаявка
2960815, 15.07.1980
ХАРЬКОВСКИЙ АВТОМОБИЛЬНО-ДОРОЖНЫЙ ИНСТИТУТ ИМ. КОМСОМОЛА УКРАИНЫ
ГЕЦОВИЧ ЕВГЕНИЙ МОИСЕЕВИЧ
МПК / Метки
МПК: B60T 8/06
Метки: автомобиля, процессом, торможения
Опубликовано: 15.03.1982
Код ссылки
<a href="https://patents.su/4-912570-sposob-upravleniya-processom-tormozheniya-avtomobilya.html" target="_blank" rel="follow" title="База патентов СССР">Способ управления процессом торможения автомобиля</a>
Устройство для монтажа дисковых колес на автомобилях

Номер патента: 1667629
Опубликовано: 30.07.1991
Автор: Роберт
МПК: B60B 29/00
Метки: автомобилях, дисковых, колес, монтажа
...на фиг, 12. За счет искривления и наклонного положения монтажного рычага 2 на наклонной плоскости известным образом возникает горизонтальная составляющая силы, которая способна оказать влияние на насадку коле. са.5 10 15 20 25 30 35 40 45 50 зывает вдоль шейки 11, причем процессумонтажа не мешает возможный перекосмежду монтажным рычагом 2 и втулкой 1,У известных монтажных рычагов в этомположении (фиг, 9) существует опасность того. что огранка 1 О выйдет из зацепления с 55 Устройство работает следующим образом,;Монтажные рычаги 2 вводятся в отверстия свободно прислоненного колеса 19 и путем простого надвигания выполняют по- движное соединение с втулками 1, посаженными на болты 4 для крепления колеса. За счет поднятия монтажного рычага 2...
Противоблокировочная пневматическая тормозная система задних колес трехосного автомобиля

Номер патента: 962057
Опубликовано: 30.09.1982
МПК: B60T 8/02
Метки: автомобиля, задних, колес, пневматическая, противоблокировочная, тормозная, трехосного
...для предотвращения растормаживания колес при полной из остановке.Противоблокировочная система пневматических тормозов трехосного автомобиля работает следующим образом.При воздействии водителя на тормозную педаль срабатывает датчик 7 стоп- сигнала и нормально закрытый ключ 6 переводится в режим замкнутого состояния. В процессе затормаживания автомобиля задние колеса 12 блокируются неодновременно, что обусловлено различием нормальных реакций или эффективноСтью действия тормозов вследствие влияния причин технологического или эксплуатационного характера. Юз любого из контролируемых колес вызывает срабатывание датчика динамического состояния 4 или 5, и на выходе соответствующего индикатора 3 нуля появляется сигнал блокирования. Благодаря...
Прибор для проверки передних осей автомобилей при их ремонте

Номер патента: 80253
Опубликовано: 01.01.1949
Автор: Купчик
Метки: автомобилей, осей, передних, прибор, проверки, ремонте
...цередн)х с,ей автомобилей, применены дополИтсльные ножевые линейкг с грг)дуировяцпыц гцкг)гЛ)и и 1)ейсмусы устаЯвлцваемые ца подуц)кях росс)р.На чертеже изображен общий вид описвС.Ого прибора.Трбк 1 и 1 а пртб)г)ра снабжена лву 151 1 оротки:и лцнейк;)ми 2 с зяостЛС 1 Пь:."и кон 1 ями - -НО)кяти. Прсднязп 1 ецц 1.и дгя коит 1 эоля при работе с устянов:,1 ецными рейсмусями 3 правильности Оложеция рессорных подушек разл)и)ных марок автомобилей.Г,о несовпадению лицейк; 2 с острием 4 установочцг)го рсйсмуса 3 Опрсдел 5 ют дефомании Оси Б Горизонтальнои плоскости.В пел:х тниверсяльпостг)риборя пред,смот)ецио гелсскоциеское соедицсциг трубок 1 и 1 а с установкой цх цо контрольпо черте 5, с послед к)цИм закреплением зажимом 6.стацовоппс 1 е...
Стенд с четырьмя домкратами для проверки и правки балок передних осей автомобилей

Номер патента: 124690
Опубликовано: 01.01.1959
Автор: Темпов
МПК: G01B 5/30, G01M 17/007
Метки: автомобилей, балок, домкратами, осей, передних, правки, проверки, стенд, четырьмя
...стенда,Пяты неподвижных домкратов 8 упираются в опоры 12, жестко соединенные при помощи сварки со станиной стсидя. В центре стенда расположена растяжка 3, закрепляемая на балке при помощи ооъсмпого хомута 14. Стенд оснащен двумя стойками 15 с отвесом 16 и шкалой 7, двумя поворотными кулаками 18 и четырьмя трсшеточпыми ключаъи для домкратов. 111 кал 5 17 иа стойке 15 проградуирована в системе полярных координат, что удобно для записи как величины деформации, так и ее напраВлепи 5. Ограни 1 еииы 11 В центре Н 1 кяль 1 прямоугольник представляет собой поле допускои,;1 редусмотрениых заводским чертском на балку, По размерам, материалу и обработке нижняя часть каждой стойки 15 точно соответствует поворотному шкворню балки передней оси...
Механизм выключения задних рессор трехосного автомобиля с переводом на жесткое соединение рамы через средний и задний мосты с колесами автомобиля

Номер патента: 100595
Опубликовано: 01.01.1955
Автор: Ожерельев
МПК: B60G 1/02, B60G 25/00
Метки: автомобиля, выключения, жесткое, задний, задних, колесами, механизм, мосты, переводом, рамы, рессор, соединение, средний, трехосного
...и вертикальный разрез ролика серьги.Механизм выключения задних рессор трехосного автомобиля выполнен с обычным креплением блокирующей балансирной балки 1 на задней рессоре посредством стремянок, Блокирующая балансирная балка 1 имеет на.концах шарнирно укрепленные стопорные серьги 2, имеющие форму двуплечих рычагов. В проушине нижнего конца каждой серьги посредством пальца 3 укреплен бочкообразный ролик 4. На верхнем конце серьги шарнирно укреплена вилка Б, навернутая на штангу б привода, которая шарнирно соединена со штоком поршня рабочего цилиндра 7 привода двухстороннего действия. Рабочий цилиндр 7 укреплен па блокирующей балансирной балке 1. Крюки 8 жестко прикреплены к кронштейнам кожухов среднего и заднего мостов автомобиля. На...
Предыдущий патент: Устройство для управления электромагнитным тормозом
Следующий патент: Ручной привод для избирательного торможения колес транспортного средства
Случайный патент: Емкость для хранения и транспортировки агрессивных жидкостей