Способ формирования управляющегосигнала b релейно импульсныхсистемах управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
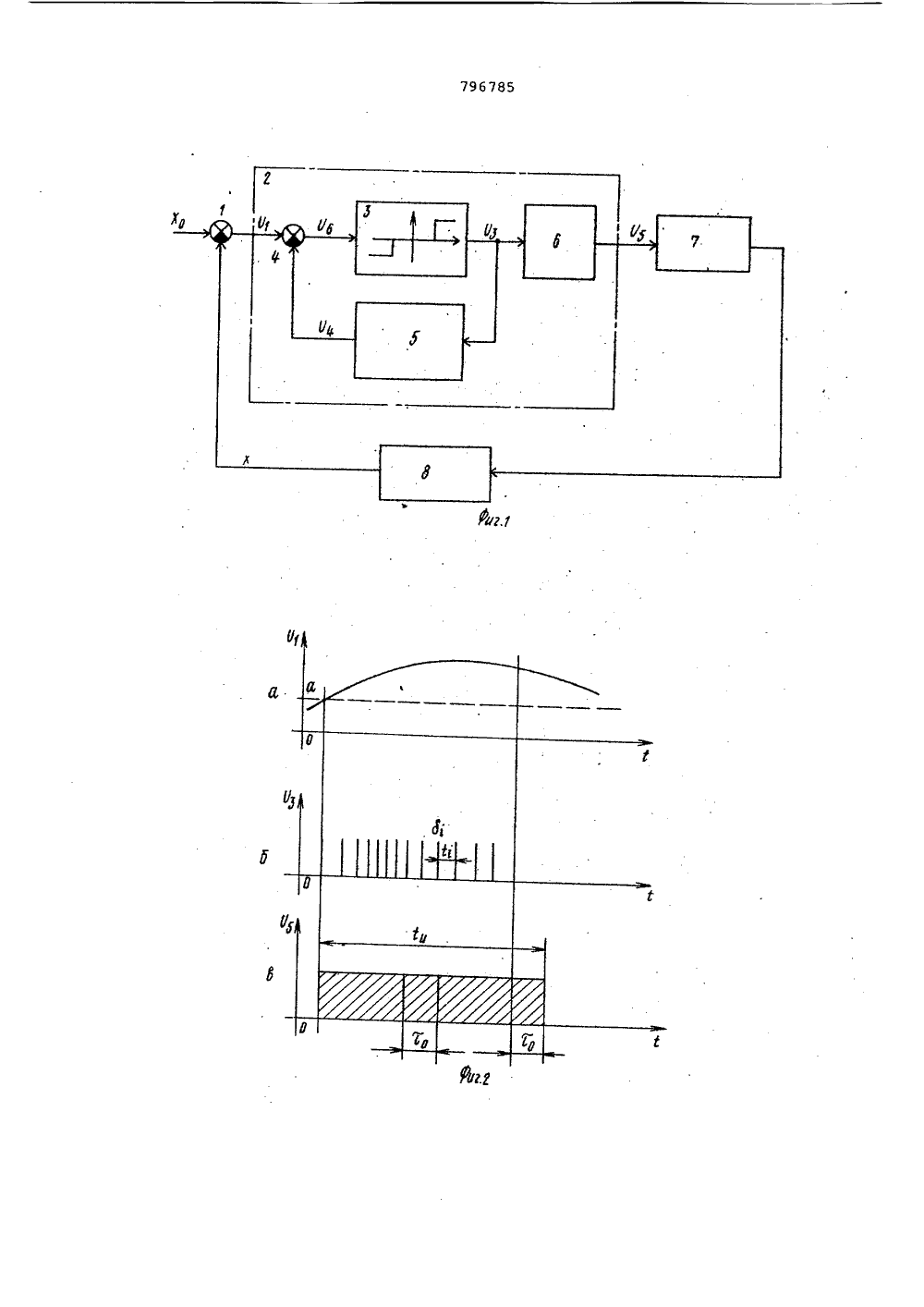
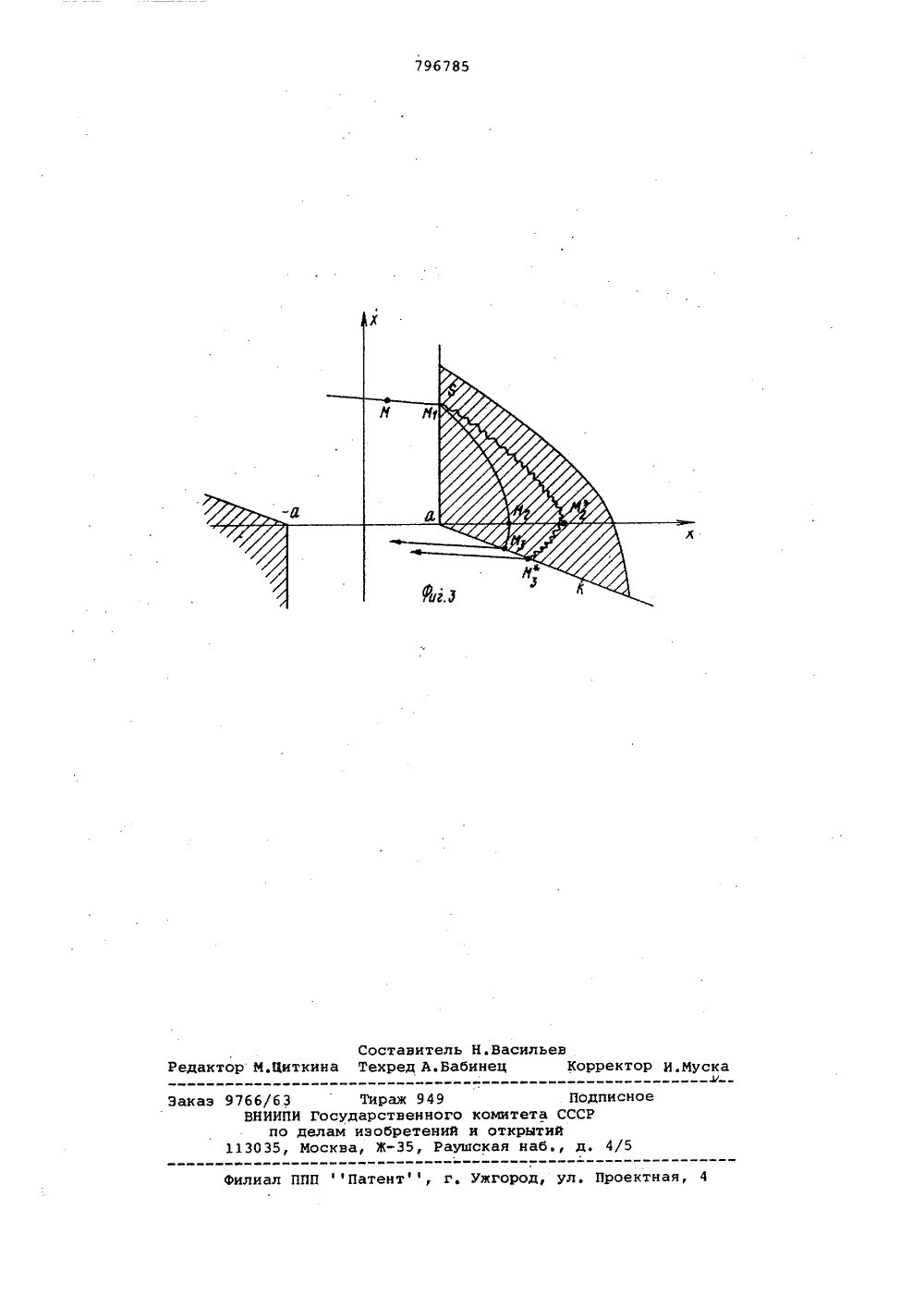
Союз Советских Социалистических республик(51)М. Кл з с присоединением эаявки йо С 05 В 11/01 ГосуаарствеииыЯ комитет СССР ио Делам изобретеииЯ и открытиЯ(23) Приоритет Опубликовано 1%01.81. Бюллетень ЙЯ 2 Дата опубликования описания 15.0 181(54) СПОСОБ ФОРМИРОВАНИЯ УПРАВЛЯЮЩЕГОСИГНАЛА В РЕЛЕЙНО-ИМПУЛЬСНЫХ СИСТЕМАХУПРАВЛЕНИЯ Изобретение относится к техникеформирования управляющих сигналов всистемах управления и регулирования,в частности в системах, в которых могут существовать скользящие режимы.Известны способы формирования управляющего сигнала, основанные наформировании импульсного сигнала впроцессе отработки ошибки управленияв скользящем режиме 1. 10Недостатком укаэанных способов является большое время управления ибольшое перерегулирование по Фазовымкоординатам, обусловленное прерыванием управляющего сигнала в скользящем режиме управления,Цель изобретения - уменьшение времени управления при одновременномуменьшении перерегулирования.20Поставленная цель достигается тем,что, начиная с момента возникновенияимпульсного сигнала за счет созданияскользящего режима при управлении,Формируют непрерывный управляющий 25сигнал, причем формирование непрерывного сигнала прекращают в момент превышения временным интервалом междусоседними импульсными сигналами некоторой, наперед заданной и опреде ляемой требуемыми характеристиками переходного процесса, величины,На фиг. 1 приведена блок-схема системы управления; на фиг. 2 - эпюры сигналов в системе; на фиг. 3 пред" ставлен Фазовый портрет системы управления.Система управления (фиг. 1) со-. держит измеритель 1 сигнала ошибки управления, выход которого соединен с Входом релейно-импульсного регулятора 2. Релейно-импульсный регулятор 2 содержит релейный элемент (РЭ) 3, охваченный цепью инерционной обратной связи через сумматор 4 и инерционное звено 5. Выход РЭ 3 соединен с входом формирователя 6 управляющего сигнала, выход которого является выходом релейно-импульсного регулятора 2, к которому подсоединены входы исполнительных органов 7 объекта управления 8.На Фиг. 2 обозначено: ось абсцисс - текущее время ; ось ординат - эпюры сигналов в соответствующих точках блок-схемы (фиг. 1).На фиг. 3 обозначено: ось абсцисс- величина ошибки управления х (при хо = О); ось ординат - величина скорости ошибки управления х; М - поло 796785жение изображающей точки на фаэовой траектории; а, -а - границы зоны нечувствительности системы; Я - область существования скользящего режима.Суть способа состоит в следующем.При достижении увеличивающимся сигналом ошибки управления границы зоны нечувствительности в системе формируется передний фронт релейного непрерывного управляющего аигнала, и начинается управление в скользящем режиме, При этом, начиная с момента образования импульсного сигнала,созданного вследствие управления в скользящем режиме, формируют непрерывный сигнал. Непрерывный сигнал заканчивается в момент времени, при котором 15 временной интервал между соседними импульсными сигналами превышает некоторую заданную величину Го.Пример реализации способа в системе управления при входном сигнале 2 О хо = О представлен ниже.;Пусть в некоторый момент времени сигнал 0, поступающий от линейного датчика - измерителя 1 сигнала ошибки управления, по величине меньше 25 уровня срабатывания а. РЭ 3 и имеет тенденцию к увеличению (сигнал Б( на фиг, 2 а). Укаэанной величине со" ответствует положение точки М на фазовой плоскости (фиг. 3). В описанной ситуации релейно-импульсный регулятор 2 находится в исходном состоянии: РЭ 3 выключен, выходной сигнал 04 инерционного звена 5 равен нулю (в качестве инерционного звена рассматривается апериодическое зве- З 5 но). При увеличении сигнала х (а, следовательно, и О при У = о, срабатывает РЭ 3, и на входы формирователя управляющего сигнала и инерционного звена 5 начинает поступать сиг О нал Н (выходной сигнал РЭ) . Выходным сигналом звена 5, который имеет нарастающий характер при включении РЭ 3, произвоцится компенсация сигнала О, и если темп изменения последнего меньше скорости нарастания сигнала Б 4, то РЭ 3 выключается через время, определяемое только его запаздыванием (временным или пространст" венным гистерезисом), В идеальном случае РЭ переключается мгновенно. О В течение времени включения РЭ на его выходе формируется одиночный импульс Д (фиг, 2 б) бесконечно малой длительности. Импульс д преобразуется формирователем 6 управляющего сигнала 55 в импульс фиксированной длительности Со (фиг. 2 в) .Выходной сигнал РЭ 3 в области скользящего режима Я представляет собой последовательность импульсов сГ, частота которых определяется параметрами сигнала х и его производной х и параметрами апериодического звена 5. Если после включения РЭ 3 времямежду двумя соседними импульсами Д 1 меньшего, то выходной сигнал формирователя 6 управляющего сигнала является непрерывным.В соответствии с приведенной выше логикой функционирования регулятора 2 изображающая точка при управлении объектом второго порядка (представляемым двумя инерционными звеньями) может иметь участки фазовой траектории типа участка М - М- М 3, на котором в точке М( производится включение исполнительных органов 7, а в точке М- их отключение (фиг. 3).Любая другая фазовая траектория с прерыванием управляющего сигнала эа счет создания скользящего режима при управлении имеет большую протяжен- ность по координате х, т.е.м"хм 1 и по координате х, т;е.)к,г )хм(.й Так как время действия управления, необходимое для перемещения изображающей точки из положения М( на линию выключения К зависит от положения точки М 3 на ней, то время действия управления с прерыванием управляющего сигнала всегда больше времени релейного непрерывного управления.Формула изобретенияСпособ формирования управляющего сигнала в релейно-импульсных системах управления, заключающийся в том, что в зависимости от ошибки управления формируют импульсный управляющий сигнал путем создания скользящего режима, отличающийся тем, что,с целью уменьшения времени управления при одновременном уменьшении перерегулирования, начиная с момента возникновения импульсного сигнала, формируют непрерывный управляющий сигнал, причем формирование непрерывного сигнала прекращают в момент превышения временным интервалом между импульсными сигналами некоторой, наперед заданной и определенной требуемыми характеристиками переходного процесса, величины.Источники информации,принятые во внимание при экспертизе1. Уткин В.И. Скользящие режимы иих применения в системах с переменнойструктурой. М., Наука, 1974,с. 13.796785 Составитель Н.ВасильевРедактор М.Яиткина Техред А.Бабинец Корректор И,М ое Эакав ПП Патент, г. Ужгород, ул. Проектная,или 766/6 3 Тираж ВНИИПИ Государствпо делам изобре 13035, Москва, Ж-З Подпикомитета СССРи открытийская наб., д, 4 949 ен ного тений 5, Рауш
СмотретьЗаявка
2376537, 22.06.1976
ПРЕДПРИЯТИЕ ПЯ В-2572
БИЧУЦКИЙ АЛЕКСАНДР ЯКОВЛЕВИЧ, ЛЕДЕНЕВ ГЕННАДИЙ ЯКОВЛЕВИЧ
МПК / Метки
МПК: G05B 11/01
Метки: импульсныхсистемах, релейно, управляющегосигнала, формирования
Опубликовано: 15.01.1981
Код ссылки
<a href="https://patents.su/4-796785-sposob-formirovaniya-upravlyayushhegosignala-b-relejjno-impulsnykhsistemakh-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Способ формирования управляющегосигнала b релейно импульсныхсистемах управления</a>
Способ определения переходной характеристики системы автоматического регулирования с релейным выходным звеном

Номер патента: 484504
Опубликовано: 15.09.1975
МПК: G05B 23/00
Метки: выходным, звеном, переходной, релейным, системы, характеристики
...переходной характеристики линейной части системы без отключения релейного звена. Это достигается тем, что ца вход системы подают дополнительный сигнал, меньший единичного, а единичный оцгпал подают по окончании переходного процессавызванного дополнительным сигналом.На фиг. 1 изображена блок-схема устройства для определения переходной характеристики линейной части системы, реализующего предлагаемый способ; ца фиг. 2 покаНа сумматор 4 подают от еполнительный сигнал х , ревыражением х , = п,х, гдцпепт, мецьший единицы, х, - ед 15 сигнал.После того, как счтстема придет в установившийся режим, на нее скачком подается сигнал хг Одновременно этот сигнал поступает в измеритель 5, который с этого момента 20 начинает отсчет времени. Через...
Преобразователь дельта-модулированного сигнала в сигнал с импульсно-кодовой модуляцией

Номер патента: 1128385
Опубликовано: 07.12.1984
Авторы: Брунченко, Власюк, Охинченко
МПК: H03K 13/24
Метки: дельта-модулированного, импульсно-кодовой, модуляцией, сигнал, сигнала
...с шиной 3 синхронизации, выходы реверсивного счетчика 1 являются выходом 4 устрой ства, счетчик 5, первый и второй Р- триггеры 6 и 7, элемент 8 ИСКЛЮЧАЮЩЕЕ ИЛИ-НЕ, первый и второй логические блоки 9 и 10, причем шина 3 синхронизации соединена с входом счетчика 5 и входами синхронизации первого и второго 2 -триггеров 6 и 7, авыход старшего разряда реверсивногосчетчика 1 подключен к первому входупервого логического блока 9, к первому входу элемента 8 ИСКЛЮЧАЮЩЕЕИЛИ-НЕ и к входу первогоЮ -триггера6, выход которого соединен с вторымвходом элемента 8 ИСКЛЮЧАЮЩЕЕ ИЛИ-НЕ,выход которого подключен к входуустановки в "0" счетчика 5, а выходсчетчика 5 - к первому входу второгологического блока 10, выход которого соединен с 3 -входом второго...
Преобразователь дельта-модулированного сигнала в сигнал с импульсно-кодовой модуляцией

Номер патента: 1216831
Опубликовано: 07.03.1986
Авторы: Савельев, Строд, Хофмаркс
МПК: H03M 7/36
Метки: дельта-модулированного, импульсно-кодовой, модуляцией, сигнал, сигнала
...когда на первый вход анализатора 2 полярности поступает нулевая пачка импульсов при наличии высокого логического уровня на втором входе анализатора полярности), то сигналявляется инверсным по отношению к сигналу 3 . На втором выходе анализатора 2 полярности при этом присутствует высокий логический уровеньПоскольку в общем случае частоты дискретизации ДМ и ИКМ сигналов различны, то для формирования выходно 12168311, Преобразователь дельта-модулированного сигнала в сигнал с импульс но-кодовой модуляцией, содержащий реверсивный счетчик, блок управления и триггеры задержки, входы которых подключены к выходам соответствующих разрядов реверсивного счетчика, первый и второй входы которого соединены с соответствующими выходами блока...
Измеритель временного положения импульсных сигналов

Номер патента: 454531
Опубликовано: 25.12.1974
Авторы: Власова, Лебедев, Михайлов
МПК: G04F 11/08
Метки: временного, измеритель, импульсных, положения, сигналов
...подключен к ударному колебательному звену, выход которого соединен через нуль-индикаторный каскад с входом цифрового измерительного устройства.На чертеже приведена блок-схетеля. Измеритель временного пол пульсных сигналов содержит бл ющий видеосигналы 1, пороговь ударное колебательное звено 3, ния колебаний 4, нуль-индикато 5 и цифровое устройство 6.Измеритель работает следующ Видеосигнал с блока 1 поступает на пороговый каскад 2, который выделяет его из сопровождающих, но меньших по уровню помех и побочных составляющих. Выделенный ви деосигнал возбуждает колебания в колебательном звене 3. Измеряя фазу возникших колебаний по моменту первого прохождения через нуль при помощи нуль-индикаторного каскада 5 с задержкой в пол-периода...
Устройство для определения временного положения импульсных сигналов

Номер патента: 640350
Опубликовано: 30.12.1978
Авторы: Антонюк, Вуколиков, Журавин, Семенов
МПК: G08C 19/12
Метки: временного, импульсных, положения, сигналов
...детектор 2, дпфферспцирующий блок 3, формрова)ель 4 пмп.)ьсов. гснсратор 5 пилообразного папряжспп)я. Олок 6 памяти, допочндительный ппковь:и детектор 7, триггср 8, элемент И 9.Устройство работает следующим образом,640350 Формула изобретения- Я Составитель Н. Лысенкоедактор И. Грузова Техред С. Антипенко Корректор Л. Котова аказ 2362/15 Изд.807 Тираж 721 НПО Государственного комитета СССР по делам изобретений и о 113035, Москва, Ж-З 5, Раушская наб., д. 4/5 Подписноеытий пография, пр. Сапунова,3По переднему фронту стробирующего импульса пиковый детектор 2 обнуляется, а триггер 2 принимает состояние О. Если в течение длительности стробирующего импульса входной сигнал не появляется на 5 входе устройства, то на выходе блока 1...
Предыдущий патент: Устройство блокировки электри-ческих нагрузок
Следующий патент: Регулятор
Случайный патент: Катализатор полимеризации 3, 3-бис-(хлорметил) оксациклобутана