Система регулирования
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
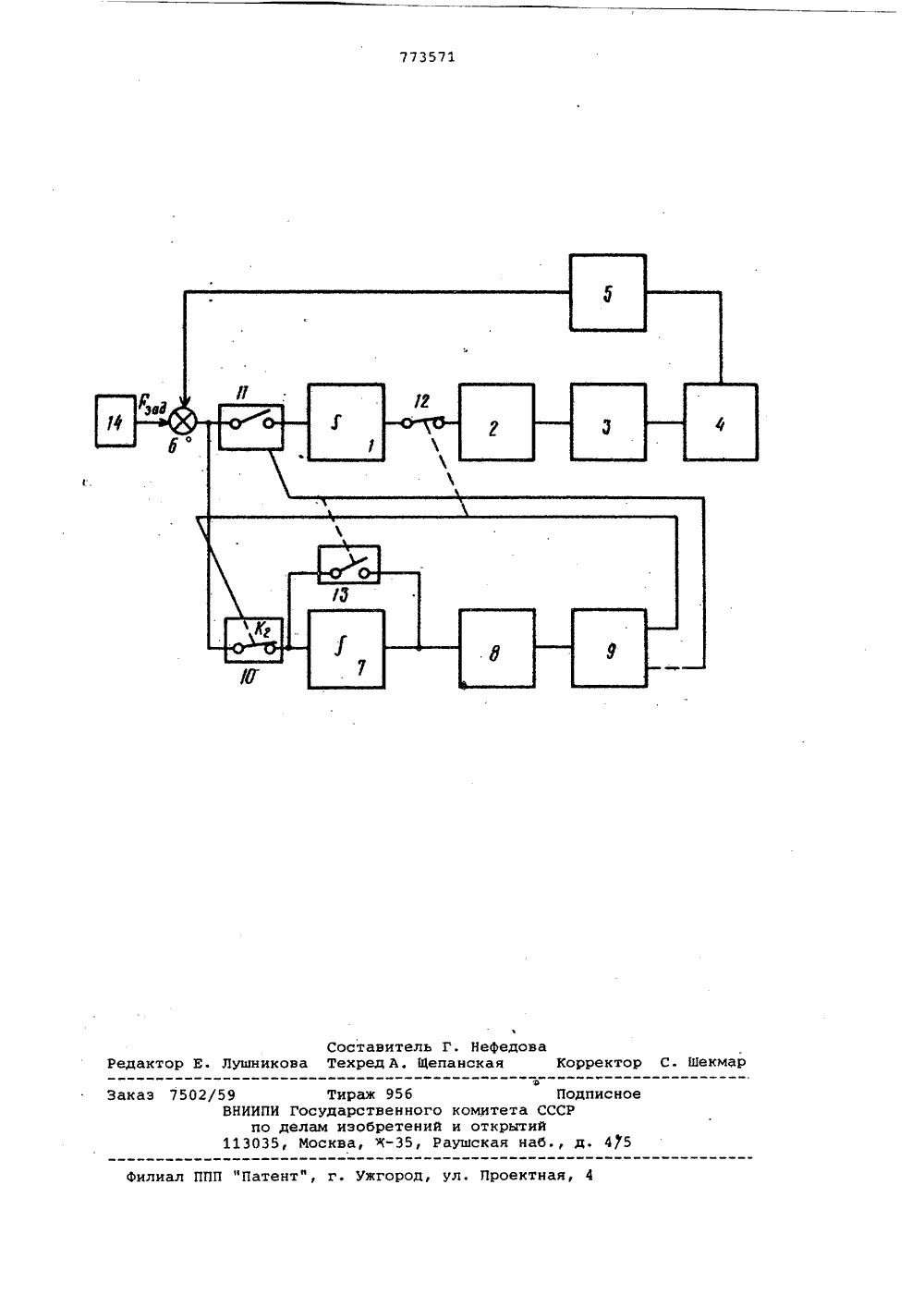
Союз Советских Социалистических РеспубликОПИСАНИЕ ИЗОБРЕТЕНИЯ оп 773571 К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ(22) Заявлено 12,0279 (21) 2723532/18-24с присоединением заявки йо(51)М. Кл.з С 05 В 11/01 Государственный комитет СССР по делам изобретений н открытий(088,8) Дата опубликования описания 231080(54) СИСТЕМА РЕГУЛИРОВАНИЯ Изобретение относится к автоматике и может быть использовано при создании систем регулирования объектами, имеющими существенные нелинейности или в случае, когда исполнительные органы системы относятся к классу существенно нелинейных устройств.Известны системы регулирования состоянием объекта по отклонению,в состав которых входят чувствительньй элемент (датчик регулируемого параметра), задатчик регулируемой ве. личины, сравнивающее устройство,усилитель разности сигналов чувствитель ного элемента и задатчика, исполнительное устройство, которое,воздействуя на объект регулирования, сводит к ничтожно малой величине разность сигналов датчика и задатчика 113 . 20 Такие системы регулирования функционируют в случае, когда объект регулирования и исполнительное устройство имеют квазилинейные характерис тики, При значительных нелинейностях у объекта регулирования или исполнительного устройства получить устойчивую работу системы при заданных высоких точностных показателях 30 весьма затруднительно, а в некоторых случаях и принципиально невозможно. Наличие существенных нелинейностей резко усложняет проектирование и реализацию систем регулирования и заставляет вводить специальные нелинейные корректирующие устройства,практическое выполнение которых: вызывает значительные трудности. Кроме того, динамические характеристики такой системы даже в случае квазилинейности ее будут неудовлетворительны.Наиболее близкой по технической сущности к предлагаемой является система регулирования, содержащая первый интегратор, формирователь временных интервалов, элемент сравнения первый вход которого подключен к задатчику, а второй вход, через последовательно соединенные чувствительный элемент и объект регулированияк выходу управляемого фаэосдвигающего элемента 21.Недостатком данной системы является трудность обеспечения устойчивости при работе ее исполнительного органа в широком диапазоне изменения Фазы управляющих сигналов при требуемых точностных показателях.Это обусловлено существенными нелинейностями характеристики исполнительного органа.Цель изобретения - повышение устойчивости системы.Цель достигается тем, что в известную систему регулирования введены запоминающий элемент, второй интегратор, пороговый элемент и четыре ключа, первые входы первого и второго ключей соединены с выходом элемента сравнения, вторые входы - соответственно с первым и вторым выходами формирователя временных интервалов, ко входу которого подключен через последовательно соединенные пороговый элемент и второй инегратор выхода первого ключа, выход второго ключа соединен через первый интегратор с первым входом третьего ключа,. второй вход которого подключен ко второму входу первого ключа, а выход - через запоминающий элемент ко входу управляемого Фазосдвигающего элемента, первый и второй входы четвертого ключа соединены соответственно с выходом первого ключа и со вторым входом второго ключа, а.выход с выходом второго интегратора.На чертеже изображена Функциональная схема системы регулирования.Система содержит первый интегратор 1, запоминающий элемент 2, управляемый фазосдвигающий элемент 3, объект 4 регулирования, чувствительный элемент 5, элемент б сравнения второй интегратор 7, пороговый элемент 8 формирователь временных интервалов 9, первый, второй, третий и четвертый ключи 10, 11, 12 и 13.(управляемые синхронно), задатчик 14.Система работает следующим образом.Пусть в какой-либо момент времени состояние объекта и регулированияотличается от заданного, при этомпервый и третий ключи 10 и 12 замкнуты, Тогда на выходе первого интегратора 1 будет постоянный по величине сигнал, который через запоминающий элемент 2 подан на управляемой Фазосдвигающий элемент 3. Так как управляющее напряжение управляемого фазосдвигающего элемента 3 имеет постоянную величину, то Фазовый сдвиг также остается постоянным и состояние объекта 4 регулирования не меняется. Сигнал, характеризующий егО, с выхода чувствительного элемента 5 подается на сравнивающий элемент б, на который также подан сигнал от задатчика 14, задающий состояние объекта4 регулирования. Разность этих сигналов (сигнал ошибки) через замкнутый первый ключ 10 подается на вход второго интегратора 7, имеющего небольшую постоянную времени. Под влиянием ее сигнал на выходе второго интегратора 7 непрерывно нарастает и в какой-то момент становится равным60 65 меньшую, чем в предыдущем цикле. Изменение управляющего сигнала происходит скачком в момент окончания временного интервала.По мере того, как состояние объекта 4 регулирования приближается к заданному, увеличиваются промежутки времени между подключением первого сигналу, при котором срабатывает пОроговый элемент 8, который включаетформирователь временных интервалов9, При его включении второй и четвертый ключи 11 и 13 замыкаются, а первый и третий ключи 10 и 12 размыкаются. При этом сигнал на выходе запоминающего элемента 2, сигнал управляемого .Фазосдвигающего элемента 3 исостояние объекта регулирования ос Е таются неизменными. Замкнувшийся чет.вертый ключ 13 закорачивает второйинтегратор 7, возвращая его в исходное нулевое состояние. Сигнал ошибкитеперь через замкнутый второй ключ11 подается на вход первого интегра 15 тора 1, имеющего значительно большуюпостоянную времени, по сравнению с постоянной времени второго интегратора 7. Поэтому его выходной сигнал за тот же промежуток времени изменя О ется во много раз медленнее, чем увторого интегратора 7. За промежутоквремени, определяемый формирователем временных интервалов 9, сигнал на выходе первого интегратора 1 изменяется на небольшую величину. При этом состояние объекта 4 регулирования остается неизменным. По окончании временного интервала, формирователь временного интервала 9 выключается, второй и четвертый ключи 11 и 13 размыкаются, а первый и третий ключи 10и 12 заьккаются. При замыкании третьего ключа 12 сигнал на выходе запоминающего элемента 2 скачком изменяется, принимая то значение, котороебыло на выходе первого интегратора1 в момент окончания временного интервала. Соответственно изменяетсясигнал управляемого фазосдвигающегоэлемента 3 и состояние объекта 4 ре гулирования, Это приводит к уменьшению сигнала ошибки, снимаемого с выхода элемента б сравнения, которыйтеперь снова начнет заряжать конденсатор (на чертеже не показан) второго интегратора 7, Так как теперь сигнал ошибки меньше, то промежутоквремени, в течение которого сигнална выходе второго интегратора, 7 достигнет уровня срабатывания порогоо вого элемента 8, становится большепредыдущего. По достижении сигналана выходе второго интегратора 7 уровня срабатывания. порогового элемента8, последнее включает формировательвременного интервала 9 и все процес-сы повторяются, Так как сигнал ошибки уменьшился, то сигнал первого интегратора 1 изменился на величину, 773571интегратора 1 к выходу элемента сравнения (к сигналу ошибки) и уменьшается величина изменения выодного сигнала первого интегратора 1 за каждый цикл подключения его к выходу элемента б сравнения (к сигналуошибки), В итоге через некоторое количество циклов состояние объекта 4 регулирования приблизится к заданному и будет колебаться вблизи его с погрешностью, определяемой параметрами системы. При возмущающем воздействии на объекте 4 регулирования появится сигнал ошибки, который быстро заряжая конденсатор второго интегратора 7 начинает подключать первый интегратор 1 к элементу б сравнения с частотой, уменьшающейся по мере приближения состояния объекта 4 регулирования к заданному.Так как воздействие на объект 4 регулирования осуществляется скачком в момент времени замыкания третьего ключа 12 и система в этот момент является разомкнутой, вопроса обеспечения устойчивости в системах малого быстродействия практически не возникает, даже при наличии значительных нелинейностей. Это является следствием временного разделения моментов формирования сигнала и его воздействия на рбъект регулирования. Система, по существу, в любой момент времени оказывается разомкнутой, что обеспечивает ее абсолютную устойчивость при устойчивости отдельных звеньев.При резких увеличениях быстродействия системы переходные процессы в объекте регулирования могут оказать существенное влияние на процессы формирования управляющего сигвала и даже привести к потере устойчивости. Однако, и в этом случае обеспечение устойчивости ее решается значительно проще и легче даже при наличии существенных нелинейностей,чем в известных системах аналогичногоназначения. Формула изобретения5Система регулирования, содержащая первый интегратор, формировательвременных интервалов, элемент срав-.нения, первый вход которого подклю чен к задатчику, а второй вход -через последовательно соединенныедатчик и объект регулирования к выходу управляемого фазосдвигающегоэлемента, о т л и ч а ю щ а я с ятем, что, с целью повышения устойчивости системы, она содержит запоминающий элемент, второй интегратор,пороговый элемент и четыре ключа,первые входы первого и второго ключей соединены с выходом элемента20 сравнения, вторые входы - соответственно с первым и вторым выходами формирователя временных интервалов,ковходу которого подключен через последовательно соединенные пороговыйЯ элемент и второй интегратор выходапервого ключа, выход второго ключасоединен через первый интегратор спервым входом третьего ключа, второйвход которого подключен ко второмувходу первого ключа, а выход - череззапоминающий элемент ко входу управляемого фазосдвигающего элемента,первый и второй входы четвертого клю.ча соединены соответственно с выходом первого ключа и со вторым входомвторого ключа, а выход - р выходомвторого интегратора.Источники информации,принятые во внимание при экспертизе1. Макаров И.М. Менский Б,М. Ли 40 нейные автоматические системы, М.,"Машиностроение", 1977, с. 9, рис.14.2. Лвторское свидетельство СССРР 541154, кл. 6 05 0 23/29,18.03.75,773571 Составитель Г. Нефедовадактор Е. Лушникова Техред А, Щепанская Шекмар ррек огЛ 9 Тираж 956 ВНИИПИ Государственного комитета С по делам иэобретений и открытий 113035, Москва, Я, Раушская наб
СмотретьЗаявка
2723532, 12.02.1979
УФИМСКИЙ АВИАЦИОННЫЙ ИНСТИТУТ ИМ. ОРДЖОНИКИДЗЕ
ГУСЕВ ВЛАДИМИР ГЕОРГИЕВИЧ, ФОКИН АНАТОЛИЙ НИКОЛАЕВИЧ, МИРИН АЛЕКСАНДР НИКОЛАЕВИЧ, ЛУКЬЯНОВ ВЛАДИМИР ЯКОВЛЕВИЧ, ВАЛИТОВ КАМИЛЬ МУЗГАТОВИЧ
МПК / Метки
МПК: G05B 11/01
Метки:
Опубликовано: 23.10.1980
Код ссылки
<a href="https://patents.su/4-773571-sistema-regulirovaniya.html" target="_blank" rel="follow" title="База патентов СССР">Система регулирования</a>
Устройство для оценки отношения корреляционных моментов второго и первого порядков

Номер патента: 1244678
Опубликовано: 15.07.1986
МПК: G06G 7/19
Метки: второго, корреляционных, моментов, отношения, оценки, первого, порядков
...процессов х.) и у1 с 1 1,К - -Т1с 1 ь 1 ь- ЮОгде р - ноРмиРованная взаимокор.реляционная функция процессов.Целью изобретения является повышение точности устройства,Параметр К является самостоятельной характеристикой форм взаимокорреляционной функции р) . Кроме того,если у с) . -) и ) х с - и) йи, т . е . ее.оляется выходом линейного звена с импульсной характеристикой Ь(о), топодставляя, производя замену перемен.ных, можно показать, чтоМг Ь) Мо(Ь) Мг(х)К = +ЖМ,(Ь) ЙО) М,(х)где М (Ь) = и"Ь(ц)йгг, - моменты имипульсной характеристики;1;:М(х) =1К (т)ДФ - момент корре)оляционной функции Квходного проацесса х,Таким образом, имеется воэможностьоценивать параметр линейного звена,что весьма важно при диагностике, ресурсных испытаниях,...
Цифровой демодулятор сигналов фазоразностной модуляции первого и второго порядка

Номер патента: 1838884
Опубликовано: 30.08.1993
Авторы: Горляковский, Крутов, Тримайлов
МПК: H04L 27/22
Метки: второго, демодулятор, модуляции, первого, порядка, сигналов, фазоразностной, цифровой
...6 и фазоцифровой дискриминатор 7,Текущие значения фазы сигнала с выхода фазоцифрового преобразователя 3 поступают на одни входы первого и второго компенсирующего сумматора 8 и 12, На другие входы компенсирующего сумматора 8 и входы умножителя 11 на два поступает корректирующий код, вырабатываемый в кольце фазовой автоподстройки, С выхода умножителя 11 на два удвоенная величина корректирующего кода поступает на сооответствующие входы второго компенсирующего сумматора 12.Такое подключение сумматоров 8 и 12 к выходам усреднителя 6 приводит к тому, что значение корректирующего кода, суммирующееся с текущим значением фазы сигнала во втором компенсирующем сумматоре 12, будет в два раза больше, чем значение корректирующего кода,...
Способ уравновешивания сил и моментов инерции первого и второго порядков в двухтактных двенадцатицилиндровых двигателях внутреннего горения

Номер патента: 58578
Опубликовано: 01.01.1940
Автор: Ярин
МПК: F16F 15/24
Метки: внутреннего, второго, горения, двенадцатицилиндровых, двигателях, двухтактных, инерции, моментов, первого, порядков, сил, уравновешивания
...параллельных рядов цилиндров двенадцатицилиндрового двухтактного двигателя внутреннего горения установлены параллельно, а колена расположены под углами 60 друг к другу и в таком порядке, при котором моменты инерции первого порядка полностью уравновешиваются (фиг. 1).Оба вала синхронно вращаются в одну и ту же сторону, причем один вал должен опережать другой с относительным сдвигом фаз вращения на 90Прп этом двигатель будет полностью уравновешен включительно до сил и моментов инерции второго порядка.В самом деле, величина момента второго порядка поступательно движущихся частей, связанных с любым коленчатым валом по Зассу може быть построена так, как показано на схеме фиг. 2.Здесь ОА - некоторый вектор, вращающийся в плоскости вращения...
Способ уравновешивания сил и моментов инерции первого и второго порядка в двухтактных двигателях внутреннего горения

Номер патента: 59024
Опубликовано: 01.01.1941
Автор: Ярин
МПК: F16C 3/20, F16F 15/24
Метки: внутреннего, второго, горения, двигателях, двухтактных, инерции, моментов, первого, порядка, сил, уравновешивания
...двигателям с числом цилин-дров в каждом ряду более шести., В каждом ряду цилиндров с числом их, равным 6+ 4 п, где п - любое положительное целое число, отличное от нуля, коленчатый вал можно выполнить состоящим по длине из двух имеющих равные углы между коленами одинаковых участков, повернутых один относительно другого на 180(например, десятиколенчатый вал с порядком колен 1, 1 Х, 11, Ч 1, Ч, Ч 1, Ч, Ч 11, 11, Х). При применении такого вала в однорядном двигателе могут остаться неуравновешенными только моменты второго порядка потому, что инерционные силы уравновешиваются в пределах каждой половины вала, а моменты центробежных сил и сил первого порядка в пределах всего вала, так как одна половина вала повернута на 180 относительной...
Способ уравновешивания сил и моментов инерции первого и второго порядка в н-образных двигателях

Номер патента: 59150
Опубликовано: 01.01.1941
Автор: Ярин
МПК: F16F 15/28
Метки: второго, двигателях, инерции, моментов, н-образных, первого, порядка, сил, уравновешивания
...в противопо-ичем угол с 1, обра п охо я ей че езр д щ р яжести противовесов А и Б ного из валов, с плоскостью, ей через оси цилиндров в данный момент, должен быть абсолютной величине углу а лоскостью, проходящей через рядка в Н-обрамя параллельно ми с помощью чаю щи йся расположены нных валов. дву- вала- тлиовесы оренх двигателях с сположеннымиивовесов, о что противих концах к центры т и ось од проходящ каждый равен помежду п протем, обо Предлагаемьвания сил ивого и второгодвигателях сположеннымитивовесов заклтивовесы распцах коренныхНа чертежевалов с протсхему располодвух валах.Пусть К - Лчатых вала Нположенные вих оси враще 1собой. центры тяжести противовесов А и Б и ось другого вала с плоскостью, проходящей через оси...
Предыдущий патент: Устройство для управления электроприводами
Следующий патент: Устройство для формирования программы управления обработкой детали
Случайный патент: Нижняя опора шпинделя хлопкоуборочного аппарата