Устройство для записи программы управления промышленным роботом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
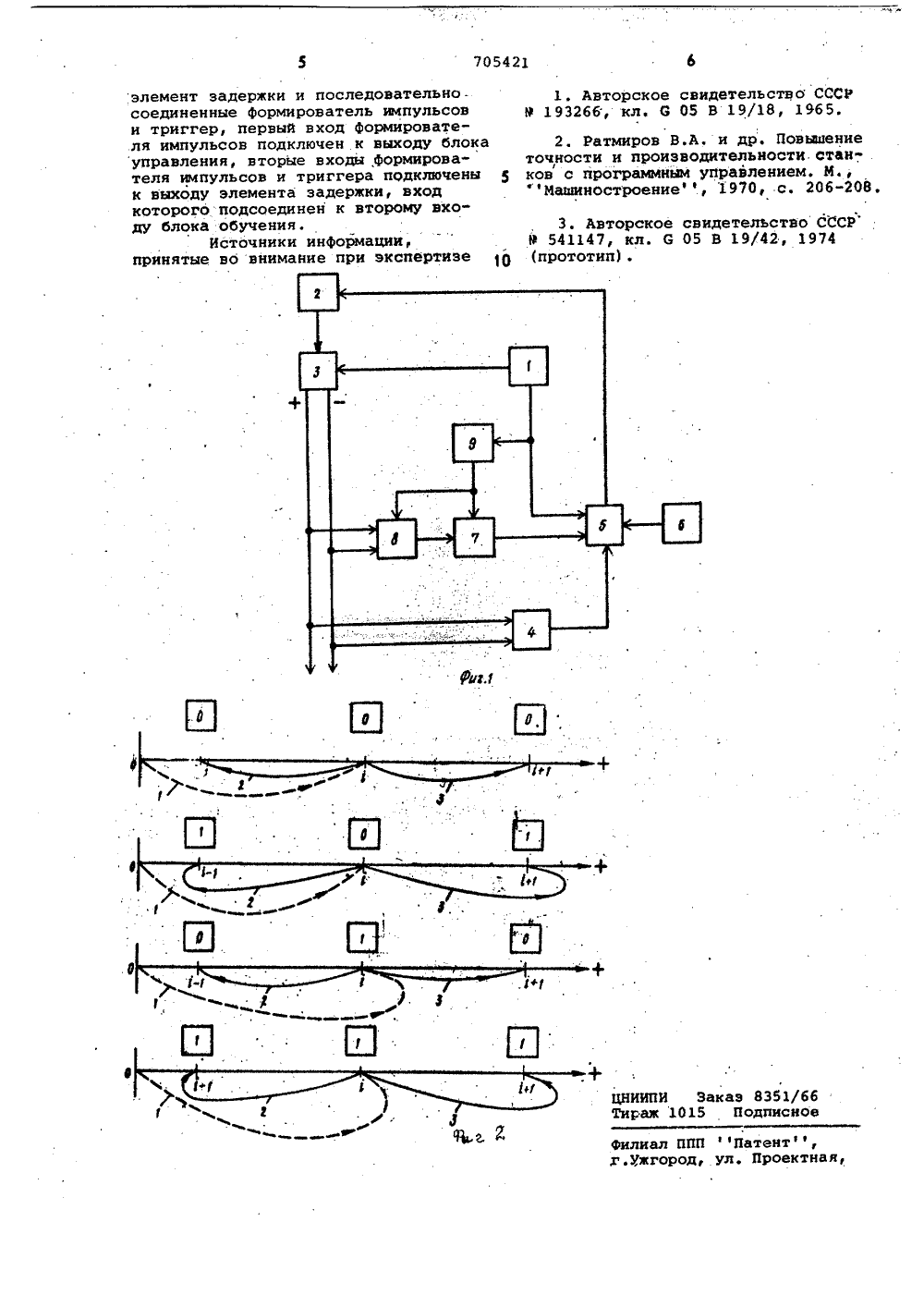
ОПИСАНИЕ ИЗОБРЕТЕНИЯ Сефз СоветскихСоциалистическихРеспублик К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ(22) Заявлено 230977 (21) 2534941/18-24 с присоединением заявки йо(23) Приоритет 6 05 В 19/18 В 25 У Я/00 Государственный комитет СССР ио Мелам изобретений и открытий(71) Заявитель Киевский институт автоматики им. ХХУ съезда КПСС(54) УСТРОЙСТВО ДЛЯ ЗАПИСИ ПРОГРАММЫ УПРАВЛЕНИЯ ПРОМЫШЛЕННЫМ РОБОТОМ Изобретение относится к области автоматизации в машиностроении и может быть использовано в системах управления роботами для записи программы.В станках с программным управлением широко применяются устРойства компенсации погрешности,.вызываемой износом инструмента. 10Известно устройство для компенсации износа инструмента в системах программного управления фрезерными станками, содержащее счетчики-нако,пители, устройство сравнения, долговременное запоминающее устрой" ство, устройство распределения выходных импульсов и сумматор 1. В указанном устройстве осуществляется сложение с командными импульсами20 дополнительной последовательности импульсов, формируемой по результату измерения износа инструмента.Недостатком известного устройства являются недостаточные техноло" гические возможности, поскольку оно не позволяет осуществлять компенса" цию знакопеременной погрешности, возникающей эа счет люфта в механизмах робота в процессе позиционирования рабочего органа при записи программы по методу обучения тот точки к точке, который преимущественно используется в промышленттых роботах.Известно также устройство, содержащее отдельную систему воспроизведения коррекции; записанной на допол:нительной дорожке магнитной ленты (2).Данному устройству присущ тот же недостаток, и, кроме того, оно отличается сложностью, поскольку содержит дополнительный канал управления двигателем коррекции. Наиболее близким к изобретению является устройство для программного управления, содержащее устройство обучения, подключенное к устройству управления, а также логическое запоминающее устройство, соединенное с устройством управления (31. Устройство обеспечивает запись в запоминающее устройство величин приращений в интервалах между точками позиционирования рабочего органа.Недостатком устройства является невысокая точность записи, поскольку при позиционировании рабочего органа в циклах записи не учитывается знаио"переменная погрешность, возникающаяиз-за люфта в механизмах робота.Целью изобретения является повышение точности. устройства.Поставленная цель достигаетсятем,что в устройство введены элементзадержки и последовательно соединейные Формирователь импульсов и триггер, первый вход. формирователя импульсов подключен к выходу блока управления, вторые входы формировате 1 я импульсов и триггера подключенык выходу элемента задержки, входкоторого подсоединен к второму входублока обучения.На фиг 1 изображена блок-схемаустройства для записи программы упРавления промцшленйым роботом;-наФиг. 2 иэображены траектории переме-.щения рабочего органа в ( -ю точкуи возможные случаи его последующегоперемещения в (1 + 1) -ю или в (-1) -ю 20"точкй.Устройство содержит блок 1 обученияи"запоминающий блок 2, которые йодключены,к блоку 3 управления. Выходыблока 3 управления через реверсивныйсчетчик 4 соединены с сумматором 5,к которому подключены, регистр б памятии блок 1 обучения. Выход сумматорасвязан с запоминающим блоком 2. Триггер 7 подключен через Формирователь 308 импульсов к выходу блока 3 управления, а его выход связан с сумматором,Выходы сброс триггера 7 и Формирова-теля 8 импуяьсов через элемент 9 за- .держки соединен с блоком 1 обучения. 35устройство для записи программы.работает следующим образом.В процессе обучения робота привоздействии оператора через блок1 обучения на блок 3 управлЕния с выхода- последнего поступают импульсына приводы координат робота. Эти импульсы поступают также на входы реверсивного счетчика 4 и триггера 7.Смысл Работы УстРойства для записи 45программы сводится к тому, чтопо окончании процесса позиционирования вкаждой точке в запоминающем блоке 2с выхода сумматора 5 записываютсялибо только импульсы, накопленные вреверсивном счетчике .4, либо.к нимдобавляется дополнительное постоянное число импульсов,храняющееся врегистре б памяти и соответствующее средней величине люфта в диапазонеперемещений по данной оси координат. Триггер 7 работает таким образом, что добавлениемимпульсов изрегистра б йамяти к импульсам реверсивного счетчика 4 осуществляется,только в тех точках, направлениепоследнего перемещения в котобыхпри позйционировании не совпадает снаправлением перемещения в интерва- ле между данной и предыдущей точками. На Фиг. 2 циФрами 1 и 0 над точ 65 ками позиционирования рабочего органа обозначено состояние триггера 7 по окончании цикла позиционирования перед подачей команды на занесение результата перемещения в запоминающий блок 2. Триггер 7 устанавливается вместе с формирователем 8 импульсов в нулевое состояние по окончании каждого цикла позиционирования по сигналу записи с блока 1 обучения, поступающему через элемент 9 задержки. Он изменяет свое состояние только при изменении направления перемещения по цанной координате, такой режим рабо Фы обеспечивается Формирователем 8 импульсов. Запись результата суммирования в запоминающий блок 2 по окончании цикла позиционирования в очередной точке осуществляется по сигналу от блока 1 обучения. По этому сигналу результат перемещения рабочего органа, накойленный в реверсивном счетчике 4, передается в сумматор 5 где в" зависимости от наличия сигнала на выходе триггера 7 к этому результату может добавляться или не добавляться содержимое регистра б памяти.Таким образОм, в процессе обучения робота после позициоиирования в каждой очередной точке осуществляется запись в запомйнающий блок 2, поступающей в сумматор. 5 из реверсивного счетчика 4 информации о перемещении между точками с учетом величины люфта по каждой коордийате. За счет этого при воспроизведений записанной программы обеспечивается более высокая точность перемещения рабочего органа, поскольку на его положении не будет сказываться знакопеременная погрешность, возникающая при позиционировании из-за наличия люфта в механизмах робота.Техйико-экономическая эффективность выразится прежде всего в повышении качества сварных соединений за счет повышения точности записи и воспроизведения программы. формула изобретенияУстройство для записи программы управления промышленным роботом, со держащее регистр памяти, блок обуче. ния и последовательно соединенные запоминающий блок, блок управления, реверсивный счетчйк и сумматор, выход которого подклкиен к входу запоминающего блока, первый и второй выходь блока обучения подсоединены к вторым входам блока управления и сумматора соответственно, третий вход сумматора подсоединен к выходу регистра памяти, о т л и ч а ю щ е е-с я тем, что, с цельюповышения точности устройства, в него введеныавев П Патенте,ул. Проектная,Фили у.уж элемент задержки и последовательно соединенные формирователь импульсов и триггер, первый вход формировате.ля импульсов подключен к выходу блока управления, вторые входы формирователя импульсов и триггера подключены 5 к выходу элемента задержки, вход которого подсоединен к второму входу блока обучения.Источники инФормации,принятые во внимание при экспертизе 1. Авторское свидетельство СССР9 193266,кл. 6 05 В 19/18, 1965. 2. Ратмиров В.А. и др, Повышениеточности и производительности. стан- .
СмотретьЗаявка
2534941, 23.09.1977
КИЕВСКИЙ ИНСТИТУТ АВТОМАТИКИ ИМ. ХХУ СЪЕЗДА КПСС
СЕРГАЦКИЙ ГЕОРГИЙ ИВАНОВИЧ, ЛИХОШВА АЛЕКСАНДР СЕМЕНОВИЧ, ЛИНКИН ГЕННАДИЙ АНДРЕЕВИЧ
МПК / Метки
МПК: B25J 9/16, G05B 19/406, G05B 19/423
Метки: записи, программы, промышленным, роботом
Опубликовано: 25.12.1979
Код ссылки
<a href="https://patents.su/3-705421-ustrojjstvo-dlya-zapisi-programmy-upravleniya-promyshlennym-robotom.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для записи программы управления промышленным роботом</a>
Устройство для контроля записи информации в блоках памяти

Номер патента: 723675
Опубликовано: 25.03.1980
Авторы: Бигун, Литвиненко
МПК: G11C 29/00
Метки: блоках, записи, информации, памяти
...10,Информация, подлежащая записи, поступает на шины Ввод числа, откуда она подается на вход ОЗУ и напервые входы схемы сравнения 2. Счи-25танная информация с выходов ОЗУ подается на клеммы Вывод числаи навторые входы схемы сравнения 2.Устройство работает с едующим образом. 30При подаче сигнала на шину Запрос запускается формирователь записи 10, По переднему фрочту сигналас выхода формирователя записи 10 запускается Формирователь интервала. записи 6, длительность импульса которого определяет число возможных циклов записи (при условии появлениясигнала сбоя на выходе схемы сравнения 2) и через элемент ИЛИ 3, Формирователь считывания 4. Сигнал с 40выхода элемента ИЛИ 3 поступает нашину Запись ОЗУ,После записи числа, поступающегона вход ОЗУ...
Устройство для контроля записи информации в блоках памяти

Номер патента: 949720
Опубликовано: 07.08.1982
Авторы: Губский, Дзагнидзе, Слесарь
МПК: G11C 29/00
Метки: блоках, записи, информации, памяти
...7, то по первому синхроимпульсу 17 записи в регистры 1 и 435В режиме считывания информационныевходы регистров 1 и 4 подключены к входу адреса устройства. Таким образом, по синхроимпульсам считывания на адресные входы блока 2 и накопителя 5 подаются оди 4 о наковые, а не смещенные, как в режимезаписи, адреса, по которым на информационном выходе устройства появляются записанные в блоке 2 коды, отмеченные в случае неверной записи логической 1 в контрольном разряде.Таким образом, при использовании коммутатора 3, регистра 4 и триггера 8 появляется возможность при записи сместить адреса накопителя 5 относительно адресов блока 2. Это дает возможность при применении контрольного считывания производить запись одного слова за время, равное времени...
Устройство для контроля записи информации в блоках памяти

Номер патента: 1076954
Опубликовано: 28.02.1984
Автор: Дзагнидзе
МПК: G11C 29/00
Метки: блоках, записи, информации, памяти
...для установки устройства при включении питания, управляющие выходы 29 - 3 устройсгва, предназначенные для вывода импульсов Выбор кристалла ОЗУ и сигна.20лов управления коммутатором 3 соответственно. управляющие выходы 32 - 34 устройтва, предназначенные для вывода импульсов Запись, синхроимпульсов и им.пульсов Отказ соответственно, управляю 11 е выходы 35 и 36 устройства, предназначенные для вывода сигнала установки накопителя 5 и сигнала считывания соответственно и адресный выход 37 устройства и вход 38 накопителя 5. На фиг. 2 изображены синхроимпульсы на выходе 33 уст ройства, сигналы установки на входе 11,импульсы считывания на выходе 36, сигналы установки накопителя 5 на выходе 35, А, - А адреса на выходе 37 устройства (где и -...
Способ и устройство для магнитной записи телевизионных программ

Номер патента: 122302
Опубликовано: 01.01.1959
Автор: Гликлих
Метки: записи, магнитной, программ, телевизионных
...осуществляют по строкам со скоростью телевизионной развертки. После окончания записи телевизионного полукадра трубкой 1 управляющий триггер б, срабатывающир от полукадрового синхросигнала, переключает на запись трубку 2, а трубку 1 на считывание.При этом триггер 7, срабатывающий от триггера б, переключает цепь видеосигнала с управляющего электрода трубки 1 на управляющий электрод трубки 2.Трубку 1 при этом переключают на работу в режиме медленной развертки от генератора строк 8 и генератора кадров 9.Генератор строк 8 синхронизируется от строчного генератора 4, частота которого уменьшается в десять раз делителем 10 (при десяти записывающих головках) .Генератор кадровой развертки 9 имеет ступенчатую развертку. Ступеньки с амплитудой,...
Устройство программного управления ходом подвижного органа

Номер патента: 1096629
Опубликовано: 07.06.1984
Автор: Бумагин
МПК: G05G 21/00
Метки: органа, подвижного, программного, ходом
...установленную на подвижном органе плиту с прямоугольными пазами и размещенными на ней упорами с механизмами зажима упоров, упоры выполнены с одной стороны с консолью, пазы на плите выполнены сквозными, а каждый механизм зажима упора выполнен в виде неравноплечего коромысла со 40 скосами и опорной гранью, сопряженной с плитой со стороны, противоположной упору, и двух винтов, размещенных в пазу и сопряженных с упорами и коромыслом, причем один из 45 винтов установлен в отверстии меньшего плеча коромысла и ввернут в упор, а другой установлен в отверстии в консоли упора и ввернут в большее плечо коромысла.50На фиг. 1 изображено предлагаемое устройствд, вид спереди, на фиг.2 - разрез А-А на фиг. 1; на фиг. 3 вид Б на фиг, 2 на фиг. 4 -...
Предыдущий патент: Пневматическое регулирующее устройство
Следующий патент: Устройство для контроля времени срабатывания пневмореле времени
Случайный патент: Устройство для вибрационной очистки трубчатых поверхностей теплообмена