Устройство для вычисления тригонометрических функций
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 696476
Авторы: Волковыский, Титов

Текст
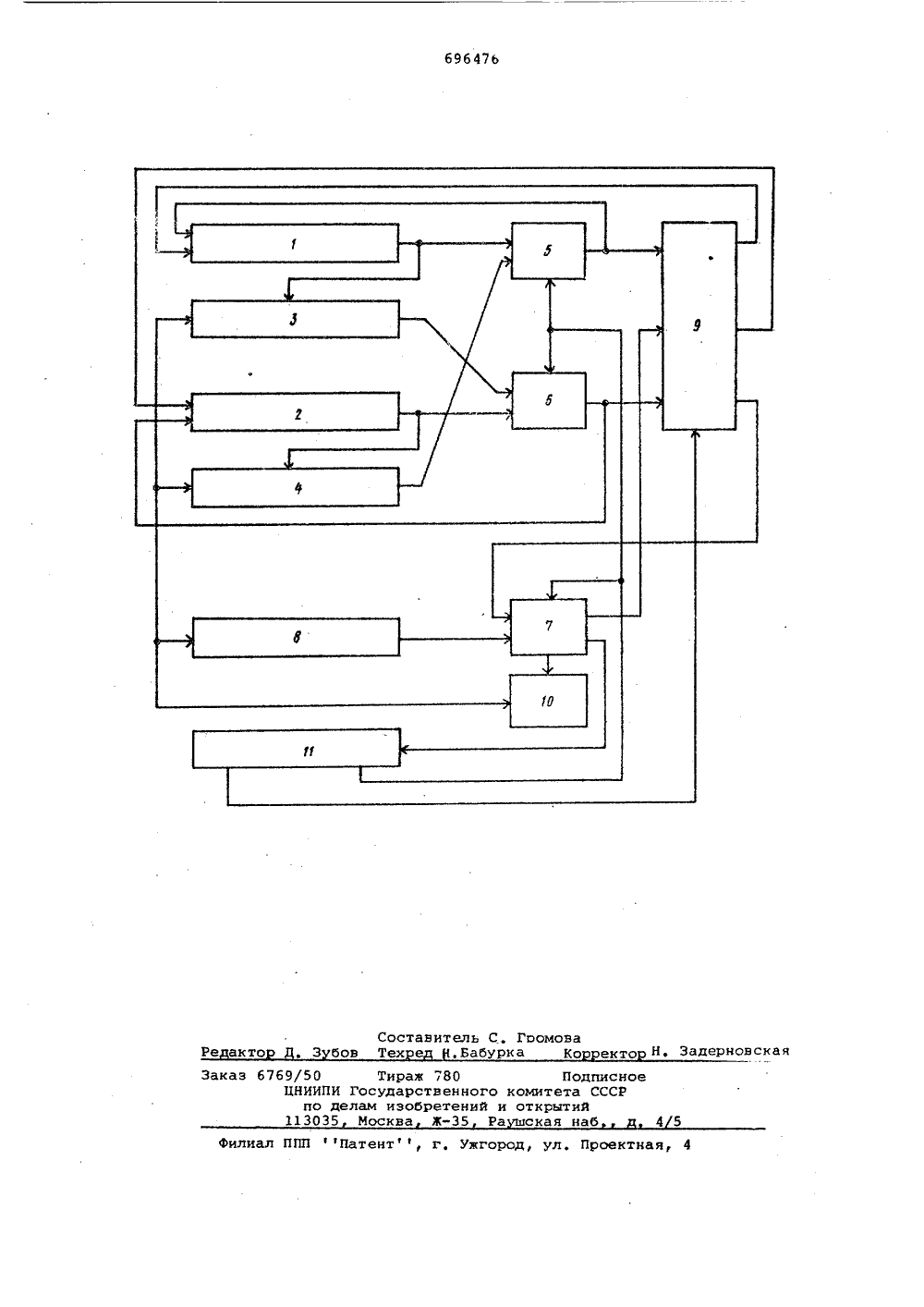
ВЙСАп Сокп СоветскихСоциалистическихРеспублик щ 696476 К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ(22) ЗаЯвлено 01.03.77(21) 2459334/18-24 (51) М, Кл. с присоединением заявки Мо(23) Приоритет 606 Г 15/34 Государственный коинтет СССР но делан изобретениИ и открытий(72) Авторы изобретения О.А. Титов и В,Л. Волковыский Рязанский радиотехнический институт(54) УСТРОЙСТВО ДЛЯ ВЫЧИСЛЕНИЯ ТРИГОНОМЕТРИЧЕСКИХ ФУНКЦИЙИзобретение относится к областивычислительной техники и может бытьиспользованопри построении цифровыхвычислительных машин, а также в качестве самостоятельного устройства,например, при решении задач навигации.Известное устройствО для вычисления тригонометрических функций обладает низкой скоростью вычислений,чтоделает его неприменимым при решениинавигационных задач в реальном масштабе времени (11,Наиболее близким по техническойсущности к предложенному изобретениюявляется устройство, содержащее дварегистра координат, два сдвигателя,блок управления, два сумматора координат и сумматор аргумента, блок памяти, выход которого подключен к первому входу сумматора аргумента, кпервым входам сумматоров координатподключены выходы соответствующихрегистров координат, ко второму входу первого сумматора координат под"ключен выход первого сдвигателя, ако второму входу второго сумматоракоординат подключен выход второгосднигателя, выходы первого и второго регистров координат подключены к первым входам второго и первого сдвигателей,соответственно 21Это устройство обеспечивает более высокую скорость вычислений, но все же его быстродействие является недостаточньщ, Во-первых, количество итераций не зависит от величины аргумента,Во многих случаях, в частности, при малых приращениях аргумента не все итерации являются необходимыми, При этом независимость числа итераций от величины приращения приводит к по" тере быстродействия, Во-вторых, после выполнения итераций модуль вектора увеличится, в результате чего требуется соответствующая коррекция результатов вычислений.Цель изобретения - повышение быстродействия,Поставленная цель в устройстве достигается тем, что в него введены дешифратор и блок экстраполяции, к первому входу которого подключен первый выход сумматорааргумента, а ко второму входу - выход первого сумматора координат и первый вход перного регистра координат, к третьему входу - выход второго сумматора координат и пернчй вход второго регистра координат, к четвертому нходурегистров 1, 2 и сумматора 7 передаются на выход устрой тва и в блокэкстраполяции, где участвуют в нычислении следующих экстраполированныхзначений координат и угла. Использование новых элементов - дешифратораи блока экстраполяции позволяет исключить ненужные итерации в обработке заданных аргументов, устранитьоперацию коррекции результата и, какследствие этого, увеличить быстродействия устройства,Формула изобретения первый выход блока управления, кпервому выходу - второй вход первого регистра координат, ко второмувыходу - второй вход второго регистра координат, а к третьему выходувторой вход сумматора аргумента,третий вход которого соединен со вторымвыходом блока управления, и третьимивходами сумматоров координат, второйвыход - со входом блока управления,а третий выход - со входом дешифратора, выход которого соединен со нходом блока памяти и вторыми входамисдвигателей,На чертеже представлена блок-схе.ма устройства, 15Устройство для вычисления тригонометрических функций содержит регистры координат 1, 2, сдвигатели 3, 4,сумматоры координат 5,6, сумматор 7аргумента, блок 8 памяти, блок 9 экс Отраполяции, дешифратор 10, блок 11управления,Устройство работает следующим образом.В блоке экстраполяции 9 хранятся 25значения координат и угла, соответствующие некоторому количеству предшествующих положений вектора.В блоке производится вычисление экстраполированных значеиий коордийат и угла вектора, Окоторые заносятся в регистры 1,2 исумматор 7, причем н сумматор записьпроисходит с инверсией знака. Далеена вход сумматора 7 поступает коднового значения аргумента, и в сумматоре образуется разность действительного и экстраполированного значений аргумента.Дешифратор 10 определяет номернаибольшей угловой константы н этойразности и выдает соответствующийсигнал на сдвигатели 3 и 4 и в блок8 памяти, По сигналам с блока 11 происходит передача содержимого регистров 1 и 2 на первые входы сумматоров5 и 6. Одновременно с этим содержимое регистров 1, 2 передается на входы сдвигателей 3, 4, выходы которыхсоединены со вторыми входами сумматоров б и 7. Величина сдвига определяется состоянием выходных шин дешифратора 10. На сумматорах 5, б производится сложение или вычитание кодов взависимости от состояния знаковогоразряда сумматора 7, который анализируется блоком 11. Полученные значения передаются из сумматоров 5 .и бв регистры 1 и 2, Одновременно с этимпроизводится выборка угловой константы из блока 8 в сумматор 7, где вы"числяется новое значение разности.Затем дешифратор 10 определяет номерследующей угловой. константы и произ"водится вычисление новых значенийкоординат и угла,После выполнения необходимого числа итераций результаты вычислений из Устройство для вычисления тригонометрических функций, содержащеедва регистра координат, два сдвигателя, блок управления, два сумматоракоординат и сумматор аргумента, блокпамяти, выход которого подключен кпервому входу сумматора аргумента,кпервым входам сумматоров координатподключены выходы соответствующихрегистров координат,. ко второму входу первого сумматора координат подключен выход первого сдвигателя, ако второму входу второго сумматоракоординат подключен выход второгосднигателя, выходы первого и второго регистров координат подключены кпервым входам второго и первого сдвиателей,соответстненно,о т л и ч а ющ е е с я тем,что,с целью понышениябыстродействия, н него введеныдешифратор и блок экстраполяции,к первому входу которого подключенпервый выход сумматора аргумента,ако второму входу - выход первогосумматора координат и первый нходпервого регистра координат, к третьему входу - выход второго сумматора координат и первый вход второгорегистра координат, к четвертому входу - первый выход блока управления,к первому выходу - нторой вход первого регистра координат, ко второмувыходу " второй вход второго регистра координат, а к третьему выходувторой вход сумматора аргумента,третий вход которого соединен со вторымвыходом блока управления, и третьими входами сумматоров координат, второй выходсо входом блока управления, а третий выход - со входом дешифратора, выход которого соединенсо входом блока памяти и вторымивходами сдвигателей.Источники информации,принятые во внимание при экспертизе1. Малая универсальная вычислительная машина фНаири-Кф. Техническое описание ПЫ 1. 700.000.ТО,часть 1 У, 1970.2. Оранский А.М. Быстррдействующее устройство для вычисления синусно-косинусных функций. Вестник БГУ,Минск, 1969, сер. 1, В 3 (прототип).696476 69/50 Тираж 780 ПодписЦНИИПИ Государственного комитета СССпо делам изобретений и открытий213035 Москва ЖРа ская наб ка Пате Филиа г, Ужгород, ул. Проектная,Составитель С Гоомовато . 3 бов Тех е ,Бабурка Ко екто Н, Задерновская
СмотретьЗаявка
2459334, 01.03.1977
РЯЗАНСКИЙ РАДИОТЕХНИЧЕСКИЙ ИНСТИТУТ
ТИТОВ ОЛЕГ АЛЕКСАНДРОВИЧ, ВОЛКОВЫСКИЙ ВЛАДИМИР ЛЬВОВИЧ
МПК / Метки
МПК: G06F 15/34
Метки: вычисления, тригонометрических, функций
Опубликовано: 05.11.1979
Код ссылки
<a href="https://patents.su/3-696476-ustrojjstvo-dlya-vychisleniya-trigonometricheskikh-funkcijj.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для вычисления тригонометрических функций</a>
Сумматор слагаемых аргумента периодической функции
Номер патента: 617775
Опубликовано: 30.07.1978
Автор: Абрамович
МПК: G06G 7/14
Метки: аргумента, периодической, слагаемых, сумматор, функции
...4 суммирующего усилителя. Тем самым обеспечивается переключение знака дополнительного сигнала на входе суммирующего усилителя 1 при переходе выходного напряжения сумматора за пределы полупериода какого-либо знака, а поскольку абсолютная величина дополнительного сигнала также соответствует полупериоду (за счет подбора величины сопротивления резисторов 4), то значение выходного сигнала У изменяется сразу на величину одного периода.Фазировка элементов сумматора такова, что внешние контуры (усилитель - компаратор - переключатель) образуют отрицательную обратную связь, а внутренние контуры (компаратор переключатель) - положительнуюю.Таким образом, автоматически, в зависимости от суммы исходных сигналов, определенное число...
Линейно-круговой интерполятор

Номер патента: 555381
Опубликовано: 25.04.1977
Автор: Кошкин
МПК: G05B 19/18, G05B 19/4103
Метки: интерполятор, линейно-круговой
...блоков ключей 3 и 4.Каждый импульс, поступивший на входыключей, вызывает суммирование текущихзначений фукций Х;=РсоаЧ; иУ; =Яби 9;, хранимых в реверсивных счетчиках 1 и 2, с содержимым сумматоров 5 и 6, в которых накапливаются значения интегралов функций4 ЬИсеЕЮвЮ и рыл дир вычисляемые в лисирет-ЕЕ9 н Чнном цифровом виде как сумма текущих значений функций Х = Х(Я и У = У(ф) при единичных приращениях аргумента, т.е, когдаимеет место );,= ф;+160 Импульсы переполнения сумматоров 5и 6 являются выходными импульсами интерполятора по первому и второму выходу,соответственно, причем каждый импульспереполнения сумматора 5 подсчитываетсясчетчиком 10 и уменьшает на "1" текущеезначение функции 38 щ) хранимой в реверсивном счетчике 2, В то же...
Устройство для автокорреляционного приема сигналов с фазоразностной модуляцией первого порядка

Номер патента: 1363518
Опубликовано: 30.12.1987
Авторы: Барбанель, Чистяков, Щелкунов
МПК: H04L 27/227
Метки: автокорреляционного, модуляцией, первого, порядка, приема, сигналов, фазоразностной
...и (или) длительности задержки первойлинии и задержки,При этом во второй квадратурной ветви с помощью перемножителя 3 и интегратора 7 вычисляется скалярное произведение сигналов хи 1 1 зг.ап 1, . = зпа Т40 Далее это напряжение преобразуется в цифровую форму в блоке 13 формирования сигналов управления и поступает на второй (управляющий) вход управляемого фазовращателя 1, с помощью которого выставляются фазовые соотношения перемножаемых в перемножителях 2 и 3 сигналов так, чтобы обеспечивалось максимальное значение напряжения на входе порогового блока 8. С выхода порогового блока 8, осуществляющего функцию определения знака сигнала на его входе, положительные и отрицательные импульсы (в соответствии со знаком косинуса первой...
Адаптивный регулятор с регулируемой обратной связью

Номер патента: 1287104
Опубликовано: 30.01.1987
Авторы: Алиев, Бабаев, Джафаров
МПК: G05B 13/00
Метки: адаптивный, обратной, регулируемой, регулятор, связью
...на выходе которого формируетСя сигнал, равный с. /(.Е+оС). Этотсигнал поступает на первый вход усилителя 22 с переменной структурой.На основе выходного сигналаз 1 дп (й 8) блока изменения структуры, поступающего на второй вход 10усилителя 22 с переменной структурой, на усилителе 22 устанавливается коэффициент усиления, равныйЧ (при Г я0) или "0" при Е дО,На выходе усилителя с переменнойструктурой 22 формируется автоматически изменяемая часть коэффициентаусиления регулятора К, равнаяМ (6) Е /(Ы +с), которая поступает на второй вход первого блока 2012 умножения основного контура.В контуре обратной связи на основе выходного сигнала прямой цепи регулятора П(г) и сигналов контураадаптации Ф и 1 е Формируются сигналы ж(С), у (й), у (-1) в...
Устройство для поиска дефектов логических блоков

Номер патента: 1605237
Опубликовано: 07.11.1990
Авторы: Белков, Братальский
МПК: G06F 11/22
Метки: блоков, дефектов, логических, поиска
...в блоках 1 и 1и режим начальной установки в триггерах 3 и 3. Начинается рабочий цикл устройства. Счетчик ч по импульсам 9 пересчитывает адреса на адресных входах блоков 1 1 и 1. В каждом такте производится чтение из блоков 1и 1 и одновременно поступает информацйя с щупов 7и 7. Соответствующие данные сравниваются на схемах 2 и 2 сравнения. При отсутствии сбоев сравнение происходит в каждом такте, триггеры ошибок не срабатывают, индикаторы не35 загораются. Циклы контроля проходят непрерывно до тех пор, пока не появит-. ся случайный сбой. В момент появления сЬоя на выходе одной из схем 2, 240 появится сигнал несравнения, который по ближайшему импульсу 9 захлопнется в соответствующий триггер 3, 3 ошибки и появится на индикационном...
Предыдущий патент: Перестраиваемый цифровой фильтр
Следующий патент: Многоканальный адаптивный коррелометр
Случайный патент: Захват для переноса слоя кирпича на печную вагонетку