Способ автоматического контроля и оценки состояния пути
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки



Текст
О П И С А Н И Е (11159994ИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз Советских Социалистических.06.7 явки М с присоединением Государственный комитет Совета Министров СССР(088.8) елам изобретени открытий писания 07.03.78 45) Дата опубл ования(72) Авторы изооретения котков, Г. А. КеренД. Кондрашов Росланас, К. С. Исаев, Ю, М В. Х. Лохматый-Будовский кий ордена Ленина институ транспорта им, акад. В(1) Заявител енингр ОЦЕНКИ 4) СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОСОСТОЯНИЯ ПУТИ рельсовоОНЕНИЯ О 1 трических попсреч51 НИЯ откл геоме утп в плане При контроле и оценке состо го пути измеряются, например условного нуля следующих параметров пути: положения п ном уровне, положения пути в колеи, коротких просадок.На чертеже показано устро ющес предлагаемый способ. еализу во Изобретение предназначено для использования на транспорте, например в путеизмерительиых вагонах при автоматическом контроле, классификации и оценке неисправностей рельсового пути.Известно путеизмерительное устройство, реализующее оценки состояния рельсового пути, в котором производятся измерения параметров датчиком, сигналы с которого подаются на преобразователь аналог - код и в цифровод кода поступают в фильтр, где обрабатываются в соответствии с требуемым алгоритмом и передаются в блок пороговых элементов, сравниваются с кодами, которые соответствуют степеням отклонений от нормы по измеряемому параметру пути. 1 осле нахождения степени отклонений от нормы определяется штраф в баллах, которые передаются в счетчик и суммируются 1.Известно также устройство, в котором ре 20 ализуется аналогичныи предлагаемому способ автоматического контроля и оценки состояния пути, основанный на измерении его параметров и преобразовании в код сигналов от датчиков параметров, последующем вводе кодированных значений измеряемых параметров в электронную вычислительную машину (ЭВЧ) и их обработке 2.Основным недостатком известных способов является постоянство по пути периодичности 3 преобразования в код и ввода в ЭВМ сигналов, характеризующих значения измеряемых параметров, при этом период выоирается в предположении постоянства статистических характеристик измеряемых параметров, что снижает точность контроля.Целью изобретения является повышение точности контроля. Это достигается тем, что преобразование в код и взод в вычислительную машину сигналов от датчиков параметров производят периодично по характеристикам измеряемых параметров в соответствии со скоростью движения путеиз мерительного транспортного средства, а команды на преобразование сигналов от датчиков параметров посылают на вход блока аналогоцифровых преобразователей после проезда участков пути, соответствующих периодам измерения параметров, в зависимости от сравнения их значений с значениями порогов функции ба,1 льной оценки пути.Блок 1 датчиков параметров задает значения измеряемых параметров в аналоговом виде, например возвратно-поступательное движение тросов измерительной системы прсобразуется во врагцательное движение вала, 5 которое служит выходом блока датчиков пара метров.Блок 2 аналого-цифровых преобразователей служит для преобразования аналоговых сигналов, характеризующих значения измеря емых параметров в код, например, для преобразования угла поворота вала в код. Кроме информационных входа и выхода, к которым подключены соответственно выход блока 1 датчиков и вход ЭВМ 3, блок 2 оборудован 15 управляющим входом, к которому подключен один из выходов ЭВМ 3.Бортовая ЭВМ 3 осуществляет прием измерительной информации и управляющих воздействий с пульта управления, классифика О цию неисправностей и оценку состояния пути в баллах, подготовку и выдачу информации на регистрацию. Кроме того, ЭВМ 3 оценивает скорость движения путеизмерителя и текущие характеристики измеряемых параметров, на основе которых определяет необходимую периодичность и последовательность преобразования и ввода в ЭВМ 3 измерительной информации, и в соответствии с этим вырабатывает управляющие сигналы, которые с вы- ЗО хода ЭВМ подключены к управляющему входу блока 2 преобразователей.Регистрирующие приборы 4 осуществляют регистрацию результирующей информации, например, на печатном бланке и перфоленте,Датчик 5 скорости, выполненный, например, в виде осевого фотоэлектрического датчика, вырабатывает импульсы, частота следования которых пропорциональна скорости движешгя путеизмерителя, и подключен к ЗВМ 3.Пульт 6 управления подключен к ЭВМ и служит для оперативного вмешательства в ход вычислительного процесса, например для ввода информации, влияющей на оценку состояния пути в баллах.45Последовательность работы по предлагаемому способу осуществляется по пунктам а, б, в, г, д, е, ж, 3.а. ЭВМ 3 принимает от датчика 5 скорости сигнал о проходе путеизмерителем элементарного участка пути, переходит к п. б.б. ЭВМ анализирует, пройден ли участок пути, соответствующий установленному для данного параметра периоду дискретизации. Если участок еще не пройден, то переходят к п. в., а если пройден, то к п. д.в. Увеличивают на единицу номер параметра и проводят, существует ли параметр с таким номером. Если существует, то возвращается к п. б., если не существует, то к п. г.г, Номер параметра определяют равным единице. Анализируют значение скорости движения путеизмерителя. Если скорость меньше некоторого порогового значения Р то устаповленные периоды дискретизации парамст ров (по пути) уменьшают на М и переходят к п. а., в противном случае переходят к п. а. без изменения периодов дискретизации.д. ЗВМ 3 вырабатывает управляющий сигнал на преобразование в код и ввод в ЭВМ сигнала, характеризующего значение параметра, для которого истек период дискретизации, и переходит к п. е.е. ЭВМ 3 определяет наличие ошибок в принятом коде, например, с использованием контроля кода по модулю два и дополнительной проверкой на допустимость величины отклонения принятого кода от кода, поступившего в предыдушнй период, При наличии ошибки повторяют п. д. с тем же номером параметра (повторное преобразование и ввод данного параметра), При получении и ошибок подряд устанавливают бесконечный период дискретизации данного параметра (обход неисправного измерительного канала) и переходят к п. в.При отсутствии ошибки переходят к п. ж.ж. ЭВМ 3 обраоатывает поступающий код параметра в соответствии с принятой методикой контроля и оценки состояния рельсового пути и вычисляет текущие корреляционные или спектральные характеристики данного параметра, например текущее среднее значение модуля первых разностей, в зависимости от которых назпачают период дискретизации данного параметра по пути, и переходит к п, з.з, ЗВМ 3 определяет отклонение принятого для нее кода от границы соответствующей функции балльной оценки. Если это отклонение меньше ЛЙ, то уменьшают период дискретизации данного параметра па ЛЯ, и переходят к п. в. В противном случае переходят к п. а.Устройство, осуществляющее предлагаемый способ, работает следующим образом.Сигналы датчика 5 скорости, подключенного к ЗВМ 3, обрабатываются в последней с целью определения необходимости преобразования в код и ввода в ЭВМ значений тех или иных параметров от блока 1 датчиков. Если период (по пути) обработки данного параметра истекает, то на управляющий вход блока преобразователей 2 подается команда на преобразование и ввод в ЭВМ данного параметра.Код, определяющий значение измеряемого параметра, поступает в ЭВМ. Принятый в ЭВМ 3 код параметра обрабатывается в соответствии с принятой методикой контроля и оценки состояния пути. Результаты обработки регистрируются на приборах блока 4, а сам ход обработки данного параметра может быть оперативно скорректирован с использованием пульта б управления, подключенного к ЭВМ 3.Затем определяются текущие характеристики измеряемого параметра и с учетом последних, а также значения скорости движения путеизмсрителя назначается периодичность (по595194 15 Составитель И. Старшов Текред А. Камышникова орректоры: Е. Хмелеваи Л Котова Редактор Т. ГоряЗаказ 183/13 Подписно в 655Министров Стипаб., д. 45 7 Тир о комитета Совета изобретений п откр Ж, Раушская Изд. Ъв 2 Государственно по делам 113035, Москва, НП. Сапунов ипография,пути) преобразования в код и ввода в ЭВМ сигналов от датчика параметра.После этого производится анализ необходимости преобразования в код и ввода в ЭВМ значений последующих параметров, работа 5 устройства при этом аналогична вышеописанному,Использование предлагаемого способа позволяет повысить достоверность результатов обработки путеизмерительной информации 10 и тем самым повысить объективность оценки работы подразделений, занятых текущим содержанием пути, и обоснованность планирования мероприятий по ремонту пути. фор мула изобретения Способ автоматического контроля и оценки состояния пути, основанный на измерении его параметров и преобразовании в код сиг палов от датчиков параметров, последующем вводе кодированных значений измеряемых параметров в электронную вычислительную машину и их обработке, отличающийся тем, что, с целью повышения точности контроля, преобразование в код и ввод в вычислительную машину сигналов от датчиков параметров производят периодично по характеристикам измеряемых параметров в соответствии со скоростью движения путепзмерительного транспортного средства, а команды на преобразование сигналов от датчиков параметров посылают на вход блока аналого-цифровых преобразователей после проезда участков пути, соответствующих периодам измерения параметров, в зависимости от сравнения их значений с значением порогов фнкции балльной оценки пути.Источники информации,принятые во внимание прп экспертизе1, Авторское свидетельство СССР%438748, кл. Е 01 В 35/00, 12.07.72.2. Ма 11 эа 1 гас 1 деогпе 1 гуапа 1 узег. 1,а 11 Епрпеег 1 по 1 п 1 егпа 11 опа 1, 1974, Кв 2, 74 - 77.
СмотретьЗаявка
2370451, 04.06.1976
ЛЕНИНГРАДСКИЙ ОРДЕНА ЛЕНИНА ИНСТИТУТ ИНЖЕНЕРОВ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА ИМ. АКАДЕМИКА В. Н. ОБРАЗЦОВА
РОСЛАНАС ВЛАДИМИР СТАНИСЛАВОВИЧ, ИСАЕВ КОНСТАНТИН СЕРГЕЕВИЧ, ЩЕКОТКОВ ЮРИЙ МИХАЙЛОВИЧ, КЕРЕНЦЕВ ГАРИЙ АЛЕКСАНДРОВИЧ, ЛОХМАТЫЙ-БУДОВСКИЙ ВСЕВОЛОД ХАИМОВИЧ, КОНДРАШОВ ГЕННАДИЙ ДМИТРИЕВИЧ
МПК / Метки
МПК: B61K 9/08
Метки: оценки, пути, состояния
Опубликовано: 28.02.1978
Код ссылки
<a href="https://patents.su/3-595194-sposob-avtomaticheskogo-kontrolya-i-ocenki-sostoyaniya-puti.html" target="_blank" rel="follow" title="База патентов СССР">Способ автоматического контроля и оценки состояния пути</a>
Устройство для контроля движения транспортных средств

Номер патента: 1345227
Опубликовано: 15.10.1987
Авторы: Доровских, Кожухов, Люханов, Малхов, Рубненков
МПК: G08G 1/00
Метки: движения, средств, транспортных
...блока индикации, выходы дешифратора кода маршрутных датчиков соединены с соответствующими входами дешифратора направления движения и первыми входами коммутатора, выходы которого соединены с соответствующими третьими входами соответствующих регистров сдвига, первые и вторые выходы дешифратора направления движения соединены соответственно с четвертым и пятым входами формирователя импульсов сдвига и вторым и третьим входами коммутатора, блок согласования, первый и второй выходыкоторого соединены соответственно с первым входом блока приема и разде 25 денных от данного маршрутного датчи- ка фиксированных отрезков пути. С выхода дешифратора 16 кода маршрутных датчиков информация поступает на входы дешифратора 18 направления движения и...
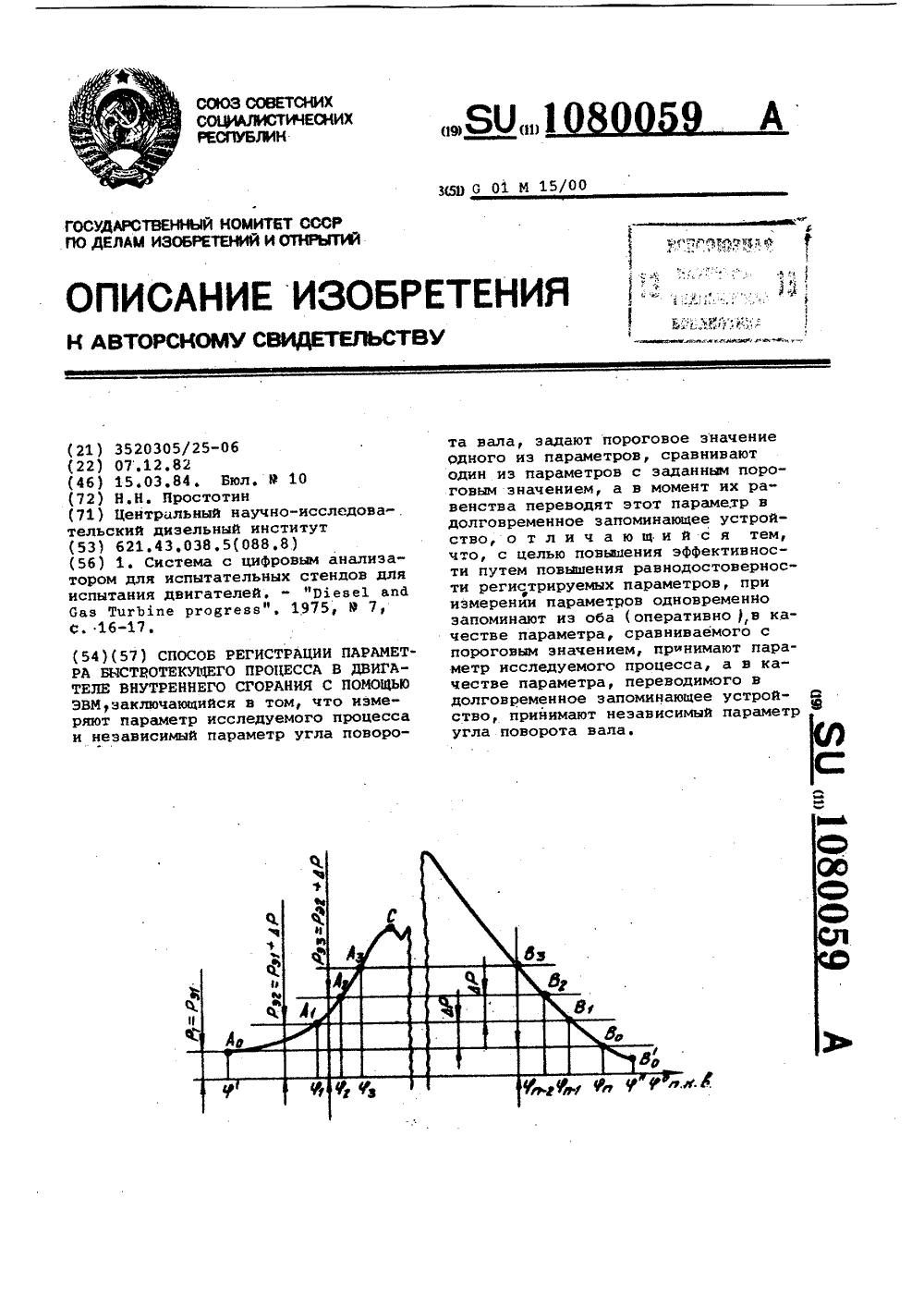
Способ регистрации параметра быстротекущего процесса в двигателе внутреннего сгорания с помощью эвм
Номер патента: 1080059
Опубликовано: 15.03.1984
Автор: Простотин
МПК: G01M 15/00
Метки: быстротекущего, внутреннего, двигателе, параметра, помощью, процесса, регистрации, сгорания, эвм
...п о ероцесса отоб- занного процесса, причем полученражает последний с переменной поугл Уное при этом значение Р присваиуглу погрешностью, Кроме того внеобнео ходимость достаточно по бФ вается некоторой переменной выполи дробного няющей функции начальной эталонРописания наиболее динамических фраг- ной величины, т,е, Р -ф Рментов исследуемого процесса вынуждай, . е 1 Э 1ет устанавливДалее осуществляется асинхронга д 0 1 О 55 ное измерение параметра Р с максиавливать малые значения шадо , п,к,н, вследствие ченаименее динамичные агментыд вие чего магьно возможным быстродействие мфр менты оказы- и реализацией операции дающейваются представленными излишне поробно сод" возможность постоянно контролирос меньшей погрешностью т евать знак...
Способ регулировки параметров поплавкового акселерометра с фотоэлектрическим датчиком угла

Номер патента: 1840669
Опубликовано: 20.09.2008
Авторы: Вовк, Григорьев, Юрасов
МПК: G01P 21/00
Метки: акселерометра, датчиком, параметров, поплавкового, регулировки, угла, фотоэлектрическим
Способ регулировки параметров поплавкового акселерометра с фотоэлектрическим датчиком угла путем выбора положения его узлов и элементов, отличающийся тем, что, с целью упрощения регулировки, перемещением излучателя устанавливают нуль датчика угла в отсутствии модулятора, заливают акселерометр рабочей жидкостью и по смещению нуля датчика угла судят о возможности дальнейшей регулировки акселерометра без заливки его рабочей жидкостью.
Имитатор ошибок двоичных кодов параметров
Номер патента: 767744
Опубликовано: 30.09.1980
МПК: G06F 1/02
Метки: двоичных, имитатор, кодов, ошибок, параметров
...ошибок двоичных кодов параметров работает следующим образом.По сигналу от блока синхронизации 1 в преобразователе 5 осуществляется считывание из источника случайных величин на специальный приемный регистр кода случайного числа, а в преобразователе 6 - считывание на свой приемный регистр кода максимальной ошибки Ьхи,с параметра, который может быть задан вручную или от ЦВМ.Двоичный код случайного числа характеризует собой случайные числа в диапазоне значений от О до 1, т. е. диапазон значений случайного числа от О до 1 выражается множеством двоичных чисел ЧО, 1, 22 , где ив разрядность кода случайного числа, С помощью дешифратора и элементов ИЛИ диапазон двоичных чисел кода случайного , числа разбивается в...
Устройство для определения параметров рабочего места и оценки позы оператора

Номер патента: 982653
Опубликовано: 23.12.1982
Автор: Рябцев
МПК: A61B 5/10
Метки: места, оператора, оценки, параметров, позы, рабочего
...(не показано) устанавливают в основное положение,. Устройство устанавливают на пол над сиденьем симметрично относительно проекции центра радиусов зоны расположения органов управления или вершины угла зоны зрительного наблюдения, Для этого измерительную телескопическую линейку 5 опускают по телескопической стойке 1 до совмещения конца линейки 5, выдвинутой на расстояние 450 мм от точки А и установки шкалы,7 на деление 270 и фиксируют ее в этом положении. Каретку 3 устанавливают на телескопической стойке 1 при показании деления 180 на шкале 4 и фиксируют в этом положении. После выполнения указанных установок производят горизонтирование и юстировку устройства по уровням 9 с перемещением всего устройства так, чтобы осевая линия...
Предыдущий патент: Наливная труба железнодорожного вагона
Следующий патент: Кузов автобуса с задним расположением двигателя
Случайный патент: Устройство для простановки стержней и сборки безопочных форм