Нелинейное корректирующее устройство
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1481706
Авторы: Ерчиковский, Зайденберг, Матюшенко, Рабинович



Текст
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСКИХРЕСПУБЛИК А 1 0 4 С 05 В 5 00 ОПИСАНИЕ ИЭОБРЕТЕНИА ТЕСНОМУ СИДТЛС(71) Государственный научно-исследовательский институт цветных мета лов(56) Авторское свидетельство СССР У 409122, кл. С 05 В 11/01, 1971.Авторское свидетельство СССР 9 289392, кл. С 05 В 5/01, 1968.Нелинейные корректирующие устро ства в системах автоматического уп равления. /Нод ред. Ю,И.Топчеева. М.: Машиностроение, 1971, с. 25-27 табл.1.5, и, 2. Изобретение относится к средствам коррекции систем автоматического управления и может найти применение в химической, металлургической, уголь. ной промышленности, а также в промьппленности строительных материалов и производства минеральных удобрений, например, при обогащении руды на горно-обогатительных фабриках.Цель изобретения - повышение качества регулирования устроНа фиг. показана блокройства в составе системы ния; на фиг.2 - временные проясняющие принцип действ ства и его влияния на сис(54) НЕЛИНЕЙНОЕ КОРРЕКТИРУЮЩЕЕ УСТРОИСТВО (57) Изобретение относится к средствам коррекции систем автоматического управления и может найти применение в химической, металлургической, уголь" ной промьппленности, а также в промышленности строительных материалов и производства минеральных удобрений, например, при обогащении руды на горно-обогатительных фабриках. Целью изобретения является повышение качества регулирования устройства. Для этого сигнал ошибки регулирования дифференцируется, ограничивается и умножается на модуль сигнала ошиб-ки регулирования. Результат проведения суммируется с сигналом ошибки регулирования. 2 ип. Устройство содержит объект 1 регулирования с запаздыванием, датчик 2,задатчик 3, блок 4 сравнения, дифференциатор 5, ограничитель 6, умножитель 7, блок 8 выделения модуля, сумматор 9, регулирующий блок 10 и исполнительное устройство 11, .нелинейноекорректирующее устройство 12,На фиг.1 и 2 приняты обозначения:х - сигнал ошибки регулирования; хвыходной сигнал дифференциатора 5;Х - выходной сигнал ограничителя 6;Е - выходной сигнал умножителя 7;У - выходной сигнал сумматора 9; 1 -выходной сигнал регулирующего блока;У - выходной сигнал исполнительного1481706 20 30 50 устройства;- коэффициент передачи ограничителя 6.Нелинейное корректирующее устройство в составе системы работает сле 5 дующим образом,Выходной сигнал объекта 1 регулирования измеряют датчиком 2, выходной сигнал которого сравнивают с сигналом задатчика 3 в блоке 4 сравнения, 10 Сигнал ошибки регулирования с выхода блока сравнения поступает на вход дифференциатора 5, в котором формиру. ется производная х от ошибки регулирования, 15Этот сигнал поступает на вход ограничителя 6, выходной сигнал которого равенх при 1 х 6 А; Х= А при х)А;-.А при х- -А, (1) где- коэффициент передачи ограничителя 6,.Полученный сигнал Х умножают в умножителе 7 на сигнал, пропорцио нальный сигналу модуля ошибки регулирования и полученный в блоке 8 выделения модуля, и формируют на выходе умножителя 7 сигнал Е, который равенЕ = Р Х х, где Р ) О. (2)Полученный сигнал Е и сигнал ошибки регулирования х суммируют на сум" маторе 9, выходной сигнал которогоу=х+Е подают на вход регулирующего 35 блока 10, который Формирует сигнал управления 11 и в качестве которого может быть использован, например, ПИ - регулирующий блок,Выходной сигнал У блока 10 пре образуется исполнительным устройством 11 в сигнал У, который воздействует на объект 1 регулирования,На фиг,2 представлены временные диаграммы выходного сигнала корректирующего устройства 12 при различных значениях коэффициента передачиВ случае (кривая У ) при движении системы от положенияравновесия (знаки сигналов х и Х совпадают) со скоростью, превышающейно модулю уровень ограничения А, навход регулирующего блока 10 подаютудвоенный сигнал ошибки регулирования, а при движении системы к положению равновесия со скоростью, превышающей по модулю уровень ограниченияА, сигналов на вход регулятора 10не подают.В случае выполнения (3) уровеньограничения А задает ту скорость движения объекта 1 к положению равновесия, при превышении которого осуществляют "полунепрерывное" управление,т.е. размыкают систему регулированияпри движении ее к положению равновесия,При движении системы со скоростью,меньшей по модулю скорости, задаваемой уровнем ограничения А, коэффициент усиления сигнала ошибки регулирования, подаваемого на регулирующийблок 10, увеличивают при движении отположения равновесия и уменьшают придвижении системы к положению равновесия на величину, пропорциональнуюх= --1 тем самым корректируяА фдвижение системы в зависимости отскорости ее движения,Таким образом, за счет указанныхотличительных особенностей выполнения нелинейного корректирующегоустройства система приф 5 ретает новоесвойство изменять закон регулирования в зависимости от скорости движения объекта: при скоростях, превышающих скорость, задаваемую уровнемА ограничения, имеет место "полунепрерывное" управление, а при скоростях, меньших этого уровня, сигналуправления корректируется в зависимости от скоростей движения объекта,и за счет этого повышается качестворегулирования,формула изобретения Нелинейное корректирующее устройство, содержащее сумматор, соединенный первым входом с входами дифференциатора и блока выделения модуля, подключенного выходом к первому входу умножителя, соединенного выходом с вторым входом сумматора, о т л ич а ю щ е е с я тем, что, с целью повышения качества регулирования устройства, в нем дополнительно установлен ограничитель, соединенный входом с выходом дифференциатора, а выходом - с вторым входом умножителя.
СмотретьЗаявка
4294376, 06.08.1987
ГОСУДАРСТВЕННЫЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ ЦВЕТНЫХ МЕТАЛЛОВ
РАБИНОВИЧ ИЛЬЯ ИОЙЛИКОВИЧ, МАТЮШЕНКО ВАДИМ ВАДИМОВИЧ, ЕРЧИКОВСКИЙ РОАЛЬД ГЕОРГИЕВИЧ, ЗАЙДЕНБЕРГ ИОСИФ ШУЛИМОВИЧ
МПК / Метки
МПК: G05B 5/00
Метки: корректирующее, нелинейное
Опубликовано: 23.05.1989
Код ссылки
<a href="https://patents.su/3-1481706-nelinejjnoe-korrektiruyushhee-ustrojjstvo.html" target="_blank" rel="follow" title="База патентов СССР">Нелинейное корректирующее устройство</a>
Система определения параметров взаимного положения судов при траверзной передаче груза в море на ходу

Номер патента: 727512
Опубликовано: 15.04.1980
Авторы: Демидович, Завирухо, Павлов
МПК: B63B 27/18
Метки: взаимного, груза, море, параметров, передаче, положения, судов, траверзной, ходу
...переговорным устройством 61, которое состоит из усилителей 62, 63 и связанных с ними соответственно микрофона64 и громкоговорителя 65.Выходусилителя 62 соединенсблоком 66 уплотнения, второй входкоторого соединен с датчиком 23 качки, а выход - с усилителем 67 поднесущих, который соединен с модулятором 68, подключенном к источнику69 монохроматического света.для осуществления сканирования го-ловки наведения в полукомплекте раз- .гружаемого судна (фиг. 1) установлен программный блок 70 поиска, который через контакты 7,1 и 7.9 реле7 соединен с электродвигателями 12и 19 устройств 8 и 15.Система работает следующим образом.Излучение источника 69 монохроматического света принимающего полукомплекта фокусируется оптическимэлементом 3 на секторах...
Система привода дополнительных движений на прессах

Номер патента: 887267
Опубликовано: 07.12.1981
МПК: B30B 15/00
Метки: движений, дополнительных, прессах, привода
...автоматизации. Зтот распределительный вал посредством установочного дискового кулачка и системы свободного хода и торможения приводит в действие подающие валики для осуществления продольного перемещения и посредством кулачкового механизма с регулируемой длиной шага осуществляет поперечное движение подающих валков. С помощью расположенной на распределительном валу эксцентриковой шайбы через тяговый рычажный механизм и коленчатый рычаг приводятся в действие ножницы для обрезки на скрап.На фиг. 1 показана система, вид спереди; на фиг. 2 - то же, вид сбоку; па фиг. 3 - 5 - другие варианты расположения указателя положения шатуна и распределительных кулачков.Система привода дополнительных движений содержит устройство управления,...
Устройство для определения положения границ объекта

Номер патента: 1703968
Опубликовано: 07.01.1992
Автор: Буров
МПК: G01B 21/00
Метки: границ, объекта, положения
...35 40 45 50 55 ривода 7, оптическая длина одного плеча интерферометра 9 совершает колебания с частотой сигналов генератора 2 (фиг. 2), Амплитуда этих колебаний такова, что в одном крайнем положении отражателя в зоне щели диафрагмы 15 получают максимум интерференционного поля, а в другом крайнем положении - минимум. При перемещении объекта в зоне щели диафрагмы 15 появляются движущиеся в противоположных направлениях изображения границы объекта, а на выходе фотоприемника 16 появляются сигнал, из которого фильтром 19 выделяется участок гармонических колебаний и эти колебания симметрируются относительно нулевого уровня (фиг, 2),Индикаторы 3 и 21 нуля формируют короткие прямоугольные импульсы при переходе гармонических сигналов на их входах...
Устройство для коррекции положения изображения объекта
Номер патента: 1785015
Опубликовано: 30.12.1992
Автор: Ефимов
МПК: G06K 9/36
Метки: изображения, коррекции, объекта, положения
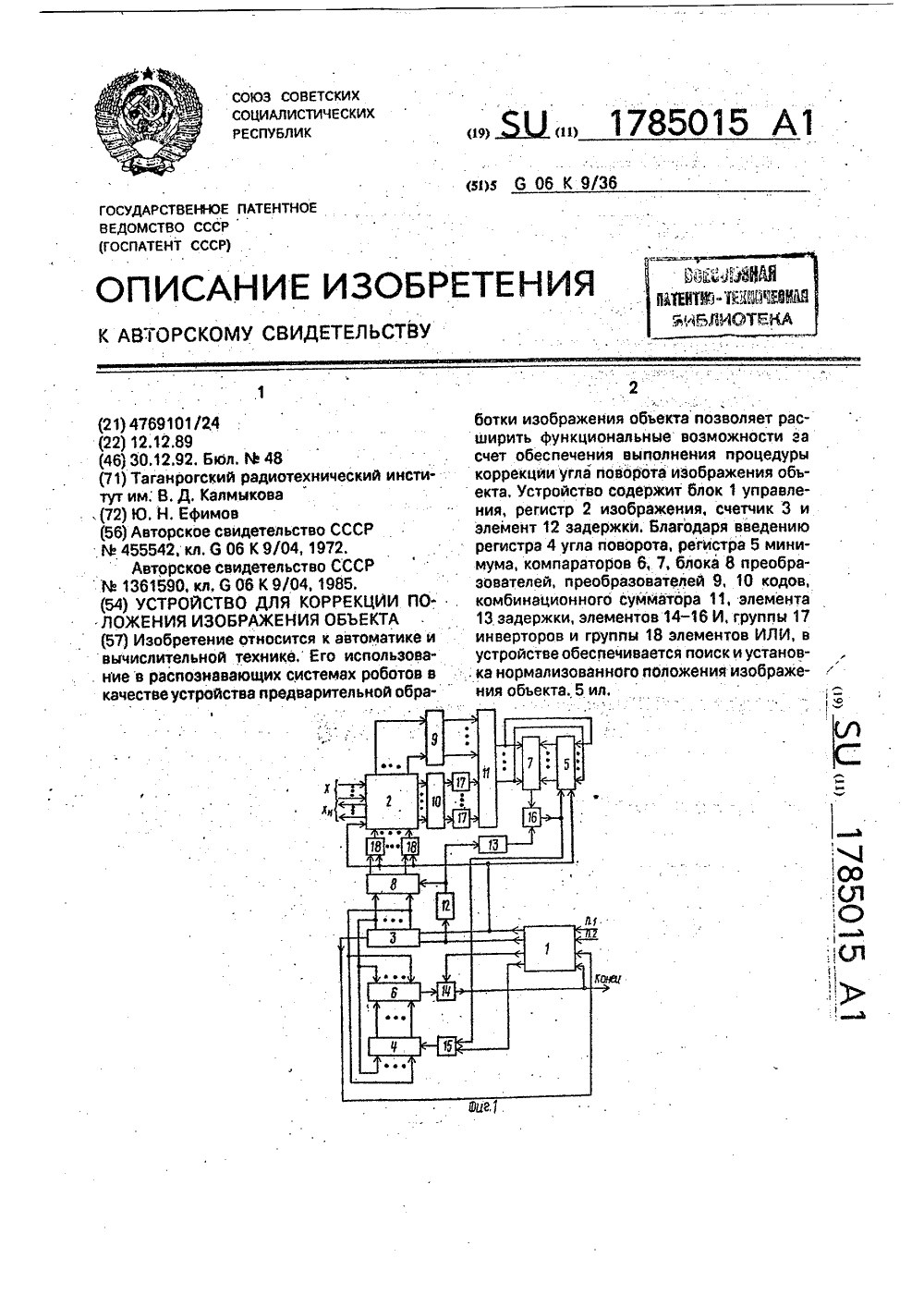
...1) число преобразуется в разность Пвах-ПВ, где образом, на выходе сумматора 11 (фиг, 1) формируется текущее значение функции ф(а)=Пг+Ппх - ПВ, зависящее от угла поворота а. Положение изображения, при кото10 20 25 мального значения функции ф(а) в регистр 5 (фиг, 1). Одновременно этот же сигнал поступает на первый вход второго элемента И 15(фиг. 1), открытый по второму 30 40 разрядов К первого счетчика 3 (фиг. 1) зависит от числа разрядов внешнего кольцевого сдвигового регистра, образованного в регистре изображения. Число же разрядов этого регистра равно ближайшему большому целому к произведению д В, где В - радиус внешней окружности, равный половине размера растра. Таким образом, размерность К первого счетчика определяется соотношением...
Датчик положения светящегося объекта

Номер патента: 1200120
Опубликовано: 23.12.1985
Авторы: Барышников, Козырев, Колычев
МПК: G01B 21/00
Метки: датчик, объекта, положения, светящегося
...импульсы, поступающиена тактирующие входы последовательныхрегистров 6-8 и счетный вход счетчика 14. Период следования импульсовс управляемого генератора 13 равенвременной задержке оптического сигнала между соседними светопроводящими жгутами волоконно-оптического преобразователя 2 55 Изобретение относится к измерительной технике и может быть использовано для измерения углового положения протяженных и точечных импульсно светящихся объектов, например,в системах оптической локации исвязи,Цель изобретения - расширениефункциональных возможностей за счетопределения положения протяженногосветящегося объекта.На фиг.1 представлена функциональная схема датчика; на фиг,2 и 3временные диаграммы работы датчика1при точечном и протяженном...
Предыдущий патент: Пневматическое устройство для сигнализации изменения давления
Следующий патент: Регулятор для объектов с запаздыванием
Случайный патент: Способ закрепления песков