Манипулятор
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки



Текст
(51) 4 В 25 3 9/00 ОПИСАНИЕ ИЗОБРЕТЕНИЯ К А ВТОРСКОМУ СВИДЕТЕЛЬСТВУ 7 ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИЙ(71) Запорожский автомобильный заводКоммунар(57) Изобретение относится к области машиностроения и предназначено для автоматизации технологических процессов снятия, переноса и установки деталей на станки для дальнейшей их обработки. Цель изобретения состоит в снижении динамических нагрузок путем уменьшения массы подвижных частей конструкции. Манипулятор содержит вторую зубчатую рейку 20, жестко закрепленную на приводной стойке 4. Блок зубчатых колес 18 и 19 шарнирно установлен на штоке силового цилиндра 5 вертикального перемещения руки. Движение кулисы 15 через первую дополнительную рейку6 передается зубчатому колесу 18. Зубчатое колесо 19, поворачиваясь на тот же угол и взаимодействуя с второй дополнительной рейкой 20, поднимает шарнирный параллелограммный механизм на нужную высоту. 2 ил.Изобретение относится к машиностроению, преимущественно к робототехнике, и предназначено для автоматизации технологических процессов снятия, переноса и установки деталей на станки для дальнейшей их обработки,Цель изобретения - снижение динамических нагрузок путем уменьшения масс подвижных частей конструкции.На фиг. 1 изображена кинематическая схема манипулятора; на фиг, 2 - его расчетная схема.Манипулятор содержит силовой цилиндр 1 плоскопараллельного перемещения руки 2, являющейся звеном шарнирного параллелограммного механизма, зубчато-реечную передачу, рейка 3 которой жестко свя зана со штоком силового цилиндра 1 плоскопараллельного перемещения руки, установленного на приводной стойке 4. Последняя смонтирована на штоке силового цилиндра 5 вертикального перемещения руки. Приводная стойка 4 жестко связана с несущим звеном 6 параллелограммного механизма. Зубчатое колесо 7 приводной зубчато-реечной передачи установлено на оси одного из шарнирнов несущего звена 6 параллелограммного механизма.Манипулятор содержит цепную передачу,звездочки которой установлены на осях шарниров несущего звена 6, при этом одна звездочка 8 жестко соединена с зубчатым колесом 7 приводной зубчато-реечной передачи, а другая звездочка 9 жестко связана с кривоЗо шипом 10 кулисного механизма. Между Дополнительная зубчато-реечная передача имеет блок зубчатых колес, шарнирно установленный на штоке силового цилиндра 5 вертикального перемещения руки,Кулиса 15 посредством рейки 16 соединена с зубчатым колесом 18 блока колес, а зубчатое колесо 19 этого блока находится в зацеплении с второй дополнительной рейкой 20, неподвижно соединенной с приводной стойкой 4.Манипулятор работает следующим образом,50 собой звездочки 8 и 9 соединены цепью 11.Звено 12 параллелограм много механизма неподвижно соединено с зубчатым колесом 7 приводной зубчато-реечной передачи, а звено 13 параллелограммного механизма -- З 5 со звездочкой 9 цепной передачи. Ползун 14 установлен в прямолинейной кулисе 15, причем кривошип 10 смонтирован в ползуне с регулируемым радиусом. Манипулятор имеет дополнительную зубчато-реечную передачу, первая дополнительная рейка 16 которой жестко связана с одной стороны с кулисой 15, а с другой - со штоком дополнительного силового цилиндра 17 (уравновешивающего механизма), Корпус дополнительного силового цилиндра 1 неподвижно сое динен с приводной стойкой 4. В исходном положении по команде из системы управления не показана) рабочая среда, например сжатый воздух, подается в поршневую полость силового цилиндра 1 плоскопараллельного движения руки 2, а его шток, жестко связанный с рейкой 3, поворачивает зубчатое колесо 7 на определенный угол . На этот же угол поворачиваются звенья 12 и 13 параллелограммного механизма, звездочки 8 и 9 и кривошип 10 кулисного механизма, при этом наличие цепной передачи предотвращает снижение точности позиционирования в мертвой точке. Рука 2 совершает плоскопараллельное движение, величина вертикальной составляющей определяется по формулеН= К(1 - соыр),где К - длина звена 13 параллелограммногомеханиза.При повороте кривошипа 10 на угол ср кулиса 5 совершает подъем на высоту Ь= =г(1 - сояр), где г - длина кривошипа 10.Движение кулисы 15 через первую дополнительную рейку 16 передается зубчатому колесу 18, шарнирно закрепленному на штоке 5 цилиндра вертикального перемещения. Второе колесо блока колес 19, поворачиваясь на тот же угол и взаимодействуя с дополнительной рейкой 20, поднимает шарнирный параллелограммный механизм на высотугвГ 8где г8 и г 19 - радиусы соответствующих колес.Но подъем параллелограммного механизма на Н вызовет дополнительное перемещение кулисы, которая в свою очередь вновь через блок зубчатых колес 19 и 18, шарнирно установленных на штоке, передает перемещение на приводную стойку 4. Г 1 ри этом шарнирный параллелограмм поднимается на высотуН -Н 1 илиН 2= ( - ) иГ 18Суммарное поступательное перемещение приводной стойки 4 вместе с шарнирным параллелограмм ным механизмом и кулисой при первоначальном повороте зубчатого колеса 7 на угол , складываясь из п таких перемещений, представляет собой выражение:Н У (139)лДля обеспечения технологических операций в труднодоступных узких зонах и рука 2, и деталь, установленная в захватах руки, совершают строго прямолинейное поступательное перемещение, что достигается равенством вертикальной составляющей плоско- параллельного движения руки и суммарного12699943поступательного перемещения приводнойстойки 4, т.е. формула изобретения щим образом: Г 18К гг -Г 19118 или --- Г 19 1 х г 18 0+4 Рве 2Составитель И. ЬакулиниТехред И. Верее Корректор Т. КолеТираж 1031 11 олпис 1 и 1 еВНИИПИ Государственного комитета СССРпо делам изобретений и открнтий113035, Москва, Ж - 35, Рау шока я. нао., д 45Филиал ППП Патенть, г. Ужгород, ул. Проектная, 4 Реда к тор М. Келем еш Заказ 6082/12 Н= Н или Н - 11( ")"тГ Г 18 Подставляя значения Н и Г 1, получаемследующее выражение:К (1 - созгг) = г (1 соД) Х " илиЯ(Г 19) л4:1 г 18 Правая часть выражения представляет собой убывающую геометрическую прогрессию, первый член и знаменатель которой равны - , а сумма определяется следуюГ 19Г 18 Рука 2, совершая строго прямолинейно- поступательное движение, доставляет деталь в необходимую технологическую зону. Для досылки детали непосредственно в установочное место технологического оборудования или извлечения ее из этого установочного места необходимо осуществить определенное дополнительное перемещение, для чего предназначен силовой цилиндр 5. Последний срабатывает после поступления команды из системы управления (не показана) и поднимает манипулятор на эту дополнительную высоту. Таким образом, для обеспечения прямолинейного перемещения руки необходимо выполнение указанного соотношения размеров зубчатых колес блока, Это соотношение близко к единице, что приводит к значительному уменьшению габаритов и металлоемкости дополнительной зубчато-реечной передачи и всего манипулятора в целом. 5 10 15 20 25 30 35 40 Манипулятор, содержащий руку, являющуюся звеном шарнирного параллелограммного механизма, кинематически связанного с кулисным механизмом, силовые цилиндры плоскопараллельного и вертикального перемещения руки, приводную стойку, установленную на штоке силового цилиндра вертикального перемещения руки и жестко связанную с несущим звеном параллелограмм- ного механизма, приводную зубчато-реецную передачу, рейка которой жестко связана со штоком силового цилиндра плоскопараллельного перемещения руки, установленного на приводной стойке, а зубчатое колесо приводной зубчато-реечной передачи установлено на оси одного из шарниров несущего звена параллелограммного механизма, цепную передачу, звездочки которой установлены на осях шарниров несущего звена, при этом одна из звездочек жестко связана с зубчатым колесом приводной зубчато-реецной передачи, а другая звездочка - с криво- шипом кулисного механизма, причем два других параллельных звена параллелограмм- ного механизма связаны соответственно с зубчатым колесом приводной зубцато-реечной передачи и со звездочкой цепной передачи, также жестко связанной с криво- шипом кулисного механизма, кроме того, он снабжен дополнительной зубчато-реечной передачей, включающей блок зубчатых колес, дополнительную зубчатую рейку, выполненную на ц 1 токе дополнительного силового цилиндра, установленного на приводной стойке, при этом его шток жестко связан с кулисой и размещен в направляющей, закрепленной на приводной стойке, отличаюиийся тем, цто, с целью снижения динамических нагрузок, он дополнительно снабжен второй зубчатой рейкой, жестко установленной на приводной стойке, а блок зубчатых колес шарнирно закреплен на штоке силового цилиндра вертикального перемещения, при этом обе дополнительные зубчатые рейки кинематически связаны посредством блока зубчатых колес.
СмотретьЗаявка
3847691, 23.01.1985
ЗАПОРОЖСКИЙ АВТОМОБИЛЬНЫЙ ЗАВОД "КОММУНАР"
СНИСАРЬ АНАТОЛИЙ ПЕТРОВИЧ, МЕЛЬНИК АЛЕКСАНДР ВСЕВОЛОДОВИЧ
МПК / Метки
МПК: B25J 9/00
Метки: манипулятор
Опубликовано: 15.11.1986
Код ссылки
<a href="https://patents.su/3-1269994-manipulyator.html" target="_blank" rel="follow" title="База патентов СССР">Манипулятор</a>
Силовая зубчатая передача смешанного зацепления

Номер патента: 1663283
Опубликовано: 15.07.1991
Авторы: Журавлев, Иванов, Иофис, Любанов, Полтавский
МПК: F16H 55/08
Метки: зацепления, зубчатая, передача, силовая, смешанного
...в силовых зубчатых передачах. Целью изобретения является повышение нагруэочной способности путем устранения геометрического концентратора напряжений в средней части по высоте зуба. В передаче смешанного зацепления, содержащей колеса, боковые профили зубьев которых включают переходные эвольвентные участки между точками 4 - 5, 8 - 9 вблизи полюса зацепления, участки Между точками 5 - 6, 9 - 10 профилей зубьев на головке и/или/ нв ножке между точками 3 - 4, 7 - 8 выполнены с кривизнами того же знака, что и сопряженные с ними части переходных участков, 1 ил. Участки профилей между точками 5-6,- 10, зубьев на головке и (или) на ножке между точками 3 - 4, 7 - 8 выполнены с кривизнами того же знака, что и сопряженные с ними части...
Способ испытания силовых зубчатых передач в замкнутом контуре

Номер патента: 1076799
Опубликовано: 28.02.1984
Авторы: Ефимов, Короткевич, Лабко, Стефанович
МПК: G01M 13/02
Метки: замкнутом, зубчатых, испытания, контуре, передач, силовых
...1.Стенд содержит основание 1, опоры2 и 3 которого предназначены дпязакрепления выходных (тихоходных) валов 4 и 5 испытуемой передачи, например, ведущего моста,Упругий элемент 6, выполненный,например, в виде торсионного вала сошлицами, предназначен дпя установкитребуемой жесткости соединения входного (быстроходного) вала 7 передачис ее корпусом 8, Упомянутое соединение осуществлено с помощью закрепленного на корпусе 8 передачи двуплечегорычага 9, снабженного подшипниковымиопорами 10 - 13, в которых соответственно помещены упругий элемент 6и кулачок 14. На шлицах упругого элемента 6 установлен рычаг-копир 15,,связанный с кулачком 14, который, всвою очередь, соединен с валом электродвигателя 16, установленным на двуплечем рычаге 9,...
Стенд для испытания силовых зубчатых передач

Номер патента: 1303873
Опубликовано: 15.04.1987
Авторы: Гоман, Ефимов, Короткевич, Лабко
МПК: G01M 13/02
Метки: зубчатых, испытания, передач, силовых, стенд
...нагружения в процессе испытаний обеспечивается изменением масс реверсивного преобразователя 18, редуктора 17 и закреп" ленных на нем грузов 19, а также изменением положения центра тяжести в горизонтальной плоскости (момента инерции), участвующей в колебательном процессе массы - корпуса 9 испытуемой передачи. Для этого включением реверсивного электродвигателя 18 приводят во вращение гайку, которая, взаимодействуя с винтом 16, перемещает реверсивный электродвигатель 18, редуктор 17 и установленные на нем грузы 19 вдоль направляющей 15. При удалении реверсивного электродвигателя 18 и редуктора 17 от корпуса 9 испытуемой передачи момент инерции последней увеличивается, что в свою .очередь уменьшает собственную частоту всей колебательной...
Способ испытания силовых зубчатых передач
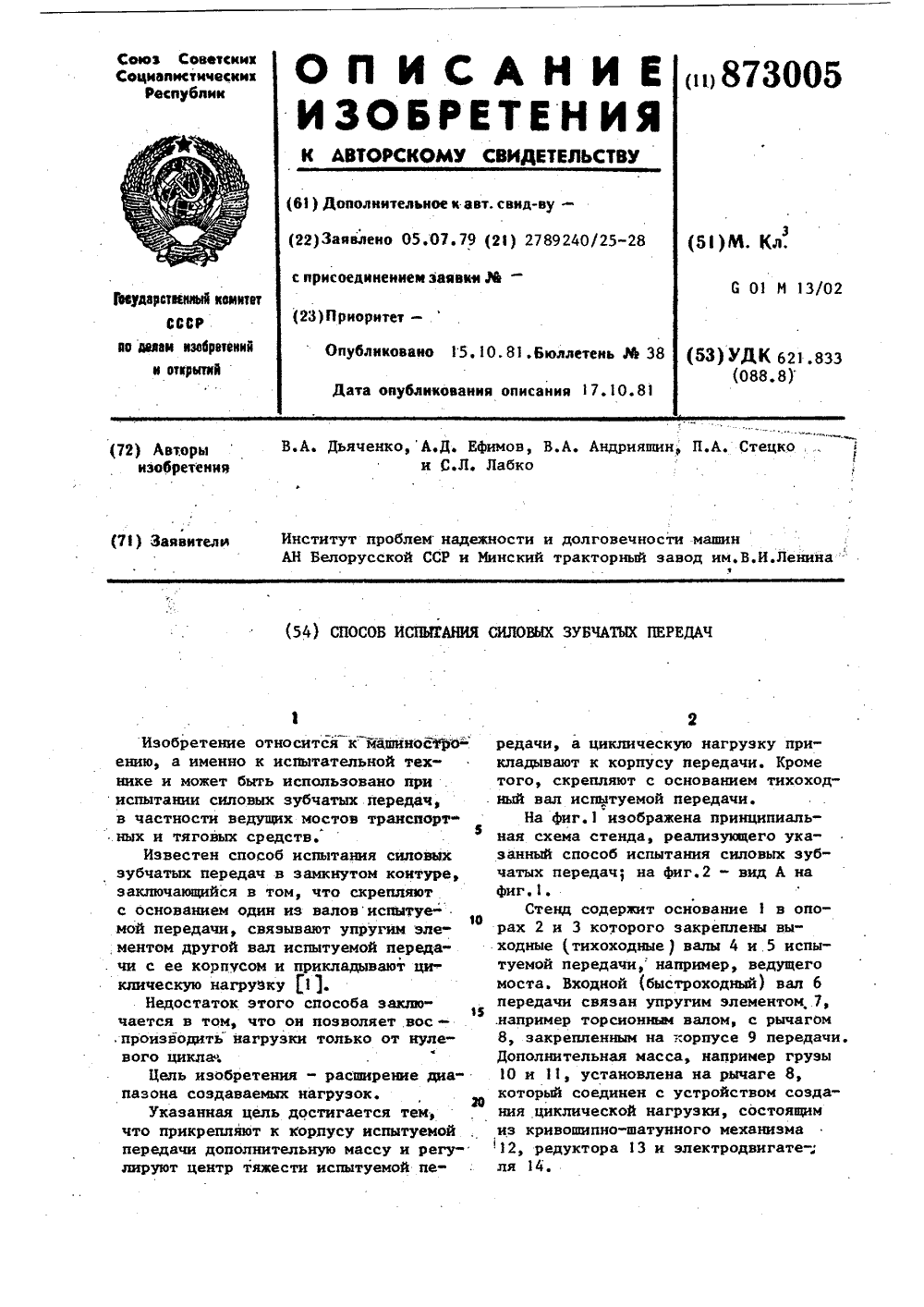
Номер патента: 873005
Опубликовано: 15.10.1981
Авторы: Андрияшин, Дьяченко, Ефимов, Лабко, Стецко
МПК: G01M 13/02
Метки: зубчатых, испытания, передач, силовых
...10 и 11.Асимметричность цикла нагружения задают предварительной закруткой и за-. мыканием силового контура упругим элементом 7, статический крутящий момент которого уравновешивают опрокидывающим моментом, приложенным к корпусу передачи который создается расположением его центра тяжести в горизонтальной плоскости, проходящей через оси защемленных валов 4 и 5, и регулировкой его положения грузами 10 и 11.Вращением электродвигателя 14, через редуктор 13 и кривошипно-шатунный механизм 12, задают колебательвые движения рыча 1 у 8, которые на валах 4 и 5 преобразуются в циклические колебания первоначально заданного статического крутящего момента, Колебания крутящего момента от валов 4 и 5 через испытуемую передачу, ее входной вал 6, упругий...
Стенд для испытания силовых зубчатых передач

Номер патента: 1114911
Опубликовано: 23.09.1984
Авторы: Ефимов, Короткевич, Лабко, Стефанович
МПК: G01M 13/02
Метки: зубчатых, испытания, передач, силовых, стенд
...связиведомого вала испытуемой передачис опорой.На фиг. 1 изображен стенд, общийвид, на фиг.2 - вид А на фцг.1.Стенд содержит основание 1,размещенные на нем опоры 2 и 3, рычаг 4 с установленными на нем грузами 5 и 6, соединенный с опорами 2 и 3 посредством полых шарниров 7 и 8, например, горизонтальных платформу 9 с жестко прикрепленной к ней корпусом (це показан) испытуемой передачей, например,коническо-цилиндрическим редуктором 10, и нагружающее устройство,состояшее из кривошипно-шатунногомеханизма 11, редуктора 12 и электродвигателя 13. Платформа 9 связана срычагом 4 регулировочными вицтами 14, с гомощью которых выставленотребуемое расстояние платформы 9 отплоскости рычага 4. Ведомый (тихоходный) вал 15 испытуемого редуктора 10 жестко...
Предыдущий патент: Исполнительный орган манипулятора
Следующий патент: Способ контроля наличия детали в механизмах захвата робота
Случайный патент: Скруббер