Пропорционально-интегрально-дифференциальный регулятор
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
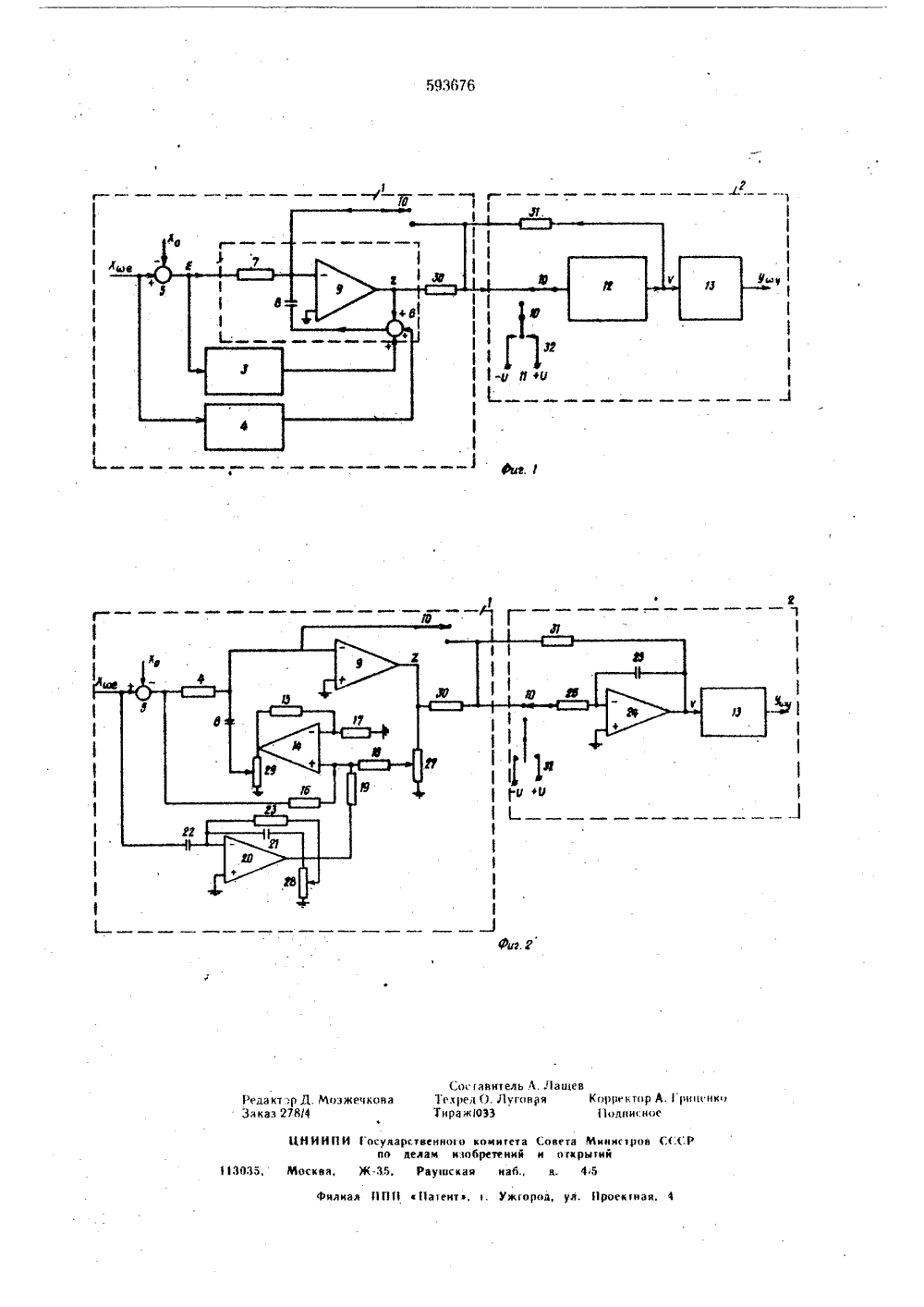
О Л И С А Й И Е ц в 93676ИЗОБРЕТЕИ ИЯ Союз Соеетсииз Социалистицескии Республик1715681/18-246,11. 1970 23) Прио Государственньй квинтет Совета Мнннстроо СССР оо делам нзобретенко н открогтнй(72) Авторы изобретени ье сгриятиематики и Помиака",Иностранное пре словы Институт Ауто(ПНР)) ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНО-ДИффЕРЕНЦ 3 АЛЬНЫЙ РЕГУЛ ЯТОР 5Изобретение относится к области автоматического управления и может быть использовано при совместной работе в ПВМ с непосрелственным цифровым управлением.Известны регуляторьг, имеюгцие пропорцио. нально-интегрируюгций блок, последовательно соединенный с интегрирующим блоком, Интегрирующий блок обеспечивает реализацию пропорционально. интегрально-дифференциальной (ПИД) функций обгцей схемы и одновременно предназначен лля ручного управления, что , обеспечивает переход с автоматического управления на ручное и обратно, без возмуьцений и без дополнительных операций. Нелостатком известного регулятора является низкая псмехозагцищенность, вход, интегрируюьцего блока должен быть вцсокоомнцм, что 1 рулно обеспечить при совмещении функций блока управления и динамического блока в одном конструктивном блоке.,Наиболее близким. техническим решением к данному изобретению является пропорционально-интегрально-дифференциальный регулятор, содержагций днтегрируюший блок; соединенный со входом исполнительного элемента, переключатель, источник постоянного напряжения, первый сумматор, вход которого соединен с лиффереицирукпцпм блоком, а выюд . со вхо.дом пропорционального блока и первым элементом обратной связи, соелпнеиньм с усили 1 елем и через второй элсмеггг обратной связи свыходом второго суммагора, входы которогосоелинень с выходами нропорцигнал ьного идифференцируюшего блоков и усилителя 2.елостатком известипо регулятора являегся низкая помехоустойчивость, взаим 1 завгимость динамических параметров лифференирования, интегрирования и пропорцнональнпд,ействия при их настройке, а также необхолимость предварительной ус 1 агговки потенциомегра ручного управления на значение, сзотиетсгвующее величине угравляк)гцего сигнала авгматического управления в момент переходаавтоматического режима на ручной.Цель изобретения заключается в повышениинадежности работы регулятора.Указанная цель достигается тем, что ре у.лятор содержит последовательно соедин. нньцтретий и четвертый элементы обраггюйня и.выход усилителя через третий элемент обратш йсвязи и переключатель подключен к вход;иусилителя и интегрирукпцего блока. а ч р зчетвертый элемент обратной связик гпгххзуинтегрируюпего блока, связанного г игточпиком постоянного напряжения.На фиг. 1 изображена структурная схемарегулятора; на фиг, 2 представлен пример технического осуществлении регулятора.Регулятор состоит из пропорционально днф.ференциального (ПИЛ) блока и блока 2 ручного управления, 5Блок 1 (ПИЛ) состоит из пропорционального блока 3, дифференцирующего блока 4, первого сумматора Ь, второго сумматора 6, первогоэлемента 7 обратной связи, второго элемента8 обратной связиусилителя 9,Блок 2 ручного управления состоит из пере.ключателя 10, источника1 постоянного напря.жения интегрирующего блока 2, исполнительного элемента 13.Второй сумматор 6 состоит из усилителя14 и резисторов 15 - 19,1Лифференцирувщий блок 4 состоит.из усилителя 20, конденсаторов 21 и 22 и резистора.23. в качестве элементов обратной:связи.Интегрирующий блок 2 состоит из усилителя 24, конденсатора 25 и.резистора 26;Потенциометры 97,. 28, 29 служат для установки динамических параметров регулятора.В состав регулятора входят третий и четвер.тый элементы обратной связи - резисторы 30,31 и кнопка 32 ручного управления.Устройство работает следующим образом.Входной сигнал; регулятора Х, подается надифференцирующийблок 4:и на сумматор 5,где он сравнивается с. заданным значением Х,Ошибка регулирования Е иодается на пропор.циональный блок 3 и.иапервый. элемент обратной связи 7.30.Выходной сигнал усилителя 9, являющийсявыходным сигналом ПИЛ блока 1, подаетсячерез резистор 30 на вход лока 2 ручногоуправления и на сумматор 6, на вход которого кроме выходного сигнала. в подается также сигнал с дифференцирующего блока 4 и с зпропорционального блока 3, Выходной сигналЧ интегрирующего блока 12, пропорциональныйвыходному сигналу Х ПИЛ блока 1, преобразуется в выходных цепях исполнительного элемента.13 в нормализованный выходной сигналрегулятора У ,40В ручном режиме управления статическаяобратная связь, осуществленная резисторами30 н 31, через переключатель 10 отключается отвхода интегрирующего блока 12.Ручное управленив осуществляется посредством кнопки 32 ручного управления, с помощью которой ня вход интегрирующего блокаГ 2 подается постоянный сигнал 13 соответствующего знака, вызывающий изменение значениявыходного сигнала регулятора. Для обеспечения перехода без возмущений с режима ручного управления на автоматичес. кий необходимо, чтобы выходной сигналЛ ПИД блока 1 во время ручного управления был ра. вен выходному сигналу Ч интегрирующего блока 2. Это достигается благодаря охвату усилителя 14 сумматора 6,статической обратной. связьо с помощью тех же резисторов 30 и 31,Переход без возмущений с автоматического режима управления на ручной осуществляется благодаря применению при ручном управлении интегрирующего блока 2, который запоминает последнее значение напряжения автоматического управления перед переходом на ручное управленив,Регулятор позволяет простым способом без возмущений и без дополнительных операций переходить с автоматического управления на ручное и обратно и осуществляет автомати. ческое переключение одного или нескольких регуляторов, что особенно важно.для того, чтобы не допускать отсутствия напряжения питания в схемах управленйя цифровой машиной,Формула изобретенияПропорционально-интегрально.дифферен.циальный регулятор, содержащий интегрирующий блок,.соединенный со входом исполнительного элемента, переключатель, источник постоянного напряжения, первый сумматор, вход которого соединен с дифференцирующим блоком,а выход - со входом пропорционального блокаи первым элементом обратной связи, соединенным с усилителем и через второй элемент обратной связи - с выходом второго сумматора, входы которого соединены с выходами пропорционального и дифференцирующего блоков и усилителя, отличающийся тем, что, с целью повышения надежности регулятора, он содержитпоследовательно соединенные третий и четвертый элементы обратной связи, выход усилителячерез третий элемент обратной связи и переключатель подключен к входам усилителя иинтегрируюгцего блока, а через четвертый элемент обратной связи - к выходу интегрирующего блока, связанного с источником постоянного напряжения,Источники информации, принятые во внима.ние прн экспертизе:1. Баранчук Е. И. Проектирование и настройка электронных регуляторов, Машгиз,1963.2. Авторское свидетельство СССР298923,кл, б 05 В 1/00, 966.Сон гавнтель А. ЛаТекред О. Луп 1 вряТиражОЭЗ твенногоелам изо миге етени соская а яиал И ПИ к Пагеи город, уд. Ироекгная. 4 едактзр Л. Мозжечковааказ 2784 ЦНИИПИ Государпо д ЗОЗ 5, Москва, Ж З 5,Советаи откр К орре к гор А. 1 рн н нодннсное Министров С(:СР гий 5
СмотретьЗаявка
1715681, 15.11.1971
ПЕТР ЯБЛОНЬСКИ, ЗБИГНЕВ ПЬЕТРУСИНЬСКИ
МПК / Метки
МПК: G05B 11/36
Метки: пропорционально-интегрально-дифференциальный, регулятор
Опубликовано: 15.02.1978
Код ссылки
<a href="https://patents.su/3-593676-proporcionalno-integralno-differencialnyjj-regulyator.html" target="_blank" rel="follow" title="База патентов СССР">Пропорционально-интегрально-дифференциальный регулятор</a>
Устройство для селекции сигналов обратной связи регуляторов тока реверсивного тиристорного преобразователя

Номер патента: 1072201
Опубликовано: 07.02.1984
Автор: Базилевский
МПК: H02M 1/08
Метки: обратной, преобразователя, реверсивного, регуляторов, связи, селекции, сигналов, тиристорного
...10 и 11 управляются с помощью двух идентичных двухконтурных регуляторов 13 и 14 тока. Регулятор 13 включает внешний контур, состоящий из усилителя 15 сигнала ошибки между заданным током моста и сигналом обратной связи и интегратора 16, и внутренний контур пропорциональное звено 17. Регулятор 14 имеет аналогичную структуру и содержит усилитель 18, интегратор 19 и пропорциональное звено 20.Для выравнивания нагрузок мостов 1 и 2, 3 и 4 регулирования тока преобразователя в целом входы 21 и 22 регуляторов 13 и 14 объединены и соединены с общим источником 23 задающего сигнала, а на другие входы 24 и 25 подаются сигналы обратной связи по току.Сигналы обратных связей формируются следующим образом: вначале сигналы шунтов 26 и 27 усиливаются...
Блок оптической связи логических блоков для запоминающего устройства

Номер патента: 1603401
Опубликовано: 30.10.1990
Автор: Вербовецкий
МПК: G06E 1/02
Метки: блок, блоков, запоминающего, логических, оптической, связи, устройства
...вход которого располагается в передней фокальыой плоскости этих объективов и является входом узла 3. На выходе каждого объектива первой группы располагается второй поликубический мультипликатор, на выходах которого установлена вторая группа1 объективов, образующая с первой телескопические системы, каждый объектив второй группы связан с входом тре01 6Оптические сигналы с выхода корректирующего узла 2 поступают на вход узла 3 мультиплицирования пучков и размножаются таким образом, чтобы они при сутствовали одновременно на всех его К-ых выходах,Таким образом, на любой 1-й вход одновременно всех К-ых блоков В может поступать оптический сигнал от любого 1-го выхода блока А. При этом топология связи блока А с блоками В может...
Регулятор с упругой обратной связью

Номер патента: 97782
Опубликовано: 01.01.1954
Автор: Вернер
МПК: G05B 11/16, G05D 23/275
Метки: обратной, регулятор, связью, упругой
...Р 1, Р управляемой дроссельным клапаном .0 посредством рычагов, связанных с кольцевыми весами % Кольцевые весы п 2 снабжены поплавком Я, опущенным в колено В 2 заполненной жидкостью 13-образной трубки Е и уравновешены грузом о; они оборудованы также контактами А и К, включающими или выключающими вспомогательное устройство, состоящее из реле Я и электродвигателя М, приводящего в действие передачи 61 и 62Колена В 1 и В 2 У-образной гибкой трубки подвешены на блоках и могут подниматься или опускаться в зависимости от направления вращения электродвигателя М. В гибкой трубке Е, соединяюц 1 ей обао Юо 97782 Москва. Стандартгвз. 1954 г колена, имеется дроссельное сужение с,При изменении перепададавления Ьр кольцевые весы Р 1 и рычаг Р...
Устройство подавления акустической обратной связи

Номер патента: 902220
Опубликовано: 30.01.1982
МПК: H03J 5/24
Метки: акустической, обратной, подавления, связи
...усилителя 6, выходы вторых ключей 12 - к второму входу сумматора 2, а выходы третьих ключей 13 - к объединенным вторым входам фазового детектора 5 и дифференциального усилителя 6.Устройство подавления акустической обратной связи работает следующим образом.Включение его в звукоусилительную систему производится в разрыв между выходом микрофонного усилителя и входом усилительно-акустической установки. В исходном состоянии после включения источников питания устанавливается единица на первом выходе регистра 8 сдвига, соответствующем первому блоку 4 режекторного фильтра.Триггеры 19 включены так, что единица на их выходе единицы устанавливается в момент перехода напряжения на их входах с уровня единицы в уровень нуля. Поэтому триггеры 19 всех...
Система управления с координатно-параметрической обратной связью

Номер патента: 1126927
Опубликовано: 30.11.1984
Авторы: Емельянов, Коровин, Сизиков, Цветкова
МПК: G05B 13/02
Метки: координатно-параметрической, обратной, связью
...первыеусилители с входами второго сумматораи через соответствующие модульныеэлементы - с входами втсрых усилителей, выходы которых соединены ссоответствующими входами первогосумматора, выход второго сумматорасоединен с входом релейного элемента, введен инерционный фильтр, подключенный входом к выходу релейногоэлемента, а выходом - к второму входу умножителя,Нэ фиг.1 дана схема, поясняющаяпредложенную систему на фиг.2схема автоматического управления,На фиг,1 приняты следующие обозначения: 1 - объект управления,2 - задэтчик с выходным сигналом(Ф) гО, 3 - регулятор контура координатной обратной связи (КОС),формирующий управление О-,),ц - задатчик координатно-параметрическойобратной связи (КУОС) с выходнымсигналом и., 5 - регулятор...
Предыдущий патент: Шахматные часы
Следующий патент: Устройство для воспроизведения сигналов времени
Случайный патент: Управляющее устройство