Устройство для программного управления промышленным роботом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
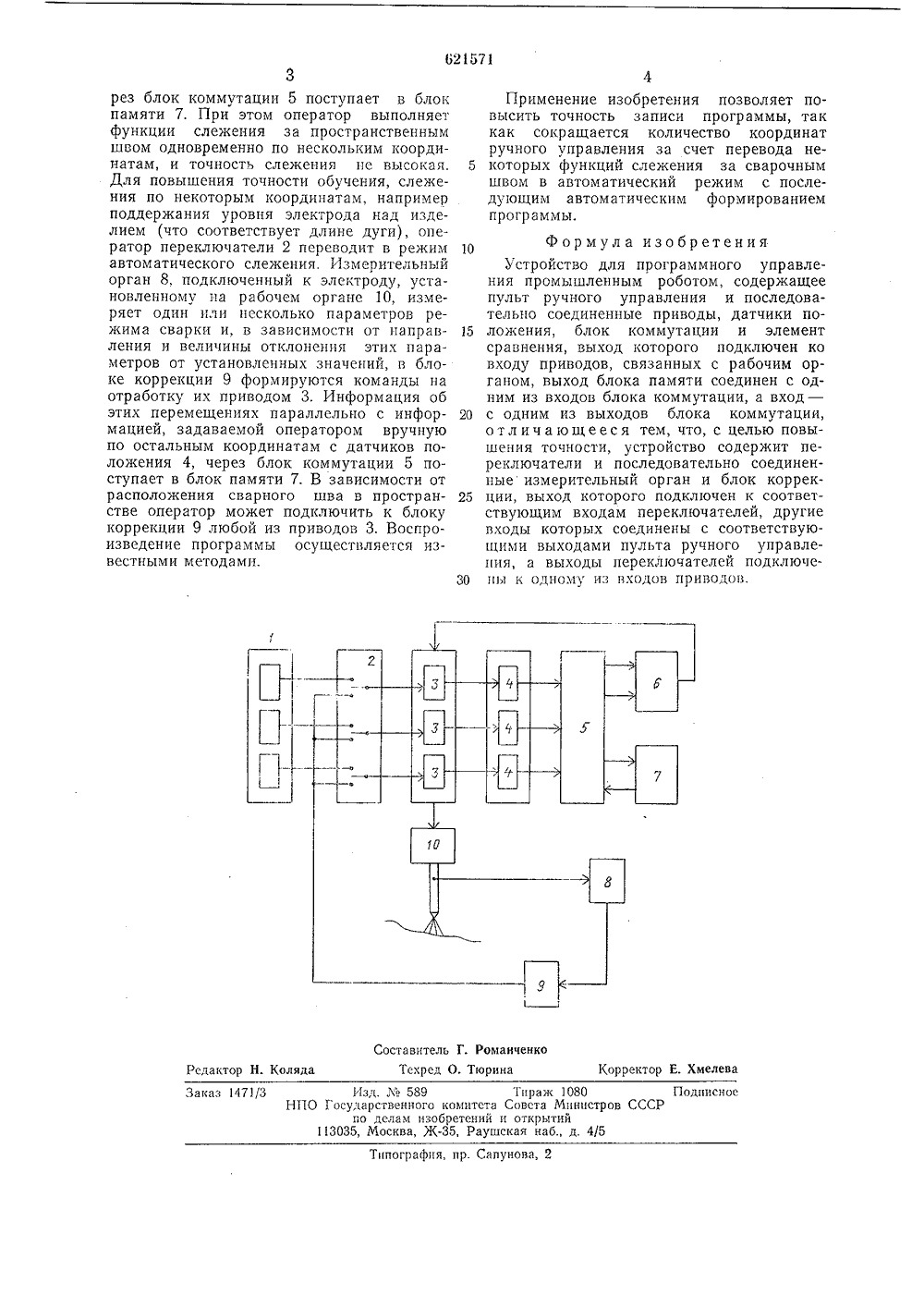
Союз Советских Социалистических Реснублик) Приоритет Государственный комитет Совета Министров СССР(53) УДК 62-50(0 до делам изобретенийи открытий2) Авторы изобретения Г. И, Сергацкий, В. С. Федоров и Г. А, ЛинкинКиевский институт автоматики имени 25 съезда КП(71) Заявит 54) УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕ ПРОМЪШЛЕННЪМ РОБОТОМ Изобретение относится к области программного управления мпогокоординатными устройствами и может быть использовано при создании систем управления движением рабочего органа промышленного робота, например, при дуговой сварке.Известное устройство для программного управления промышленным роботом, содержащее запоминающее устройство, блок коммутации, блок сравнения, приводы, датчики положения и рабочий орган, обладает низкой точностью записи программы.Наиболее близким к изобретению техническим решением является устройство, содержащее пульт ручного управлениия и последовательно соединенные приводы, датчики положения, блок коммутации и элемент сравнения, выход которого подключен ко входу приводов, связанных с рабочим органом, выход блока памяти соединен с одним из входов блока коммутации, а вход в с одним из выходов блока коммутации,Недостатком этого устройства является низкая точность записи программы, так как оператору необходимо корректировать рабочий инструмент одновременно по нескольким управляемым координатам.Целью изобретения является повышение точности устройства. Для этого устроиство дополнительно содержит переключатели и последовательносоединенные измерительный орган и блоккоррекции, выход которого подключен к5 соответствующим входам переключателей,другие входы которых соединены с соответствующими выходами пульта ручногоуправления, а выходы переключателей подключены к одному из входов приводов.10 На чертеже представлена блок-схемапредлагаемого устройства,Оно содержит пульт ручного управления1, переключатели 2, приводы 3, датчикиположения 4, блок коммутации 5, элемент15 сравнения 6, блок памяти 7, измерительный орган 8, блок коррекции 9 и рабочийорган 10.Устройство работает следующим образом.Запись программы осуществляется припомощи ручного управления, преимущественно дистанционного, в процессе сварки,одновременно по нескольким координатам.При обучении оператор, манипулируя рукояткой на пульте ручного управления 1,через переключатели 2, подает команды наприводы 3, которые перемещают рабочийорган 10, на конце которого закрепленсварочный электрод, Информация об этих30 перемещениях с датчиков положения 4 чеТираж 1080итста Совета Министрсний и открытийРаушская наб., д. 4/5 Изд Ла 589 НПО Государственного коь по дслам пзобре 113035, Москва, Жаказ 1471/3 ПодписноеСССР Типография, пр. Сапунова,рез блок коммутации 5 поступает в блок памяти 7. При этом оператор выполняет функции слежения за пространственным швом одновременно по нескольким координатам, и точность слежения пе высокая. 5 Для повышения точности обучения, слежения по некоторым координатам, например поддержания уровня электрода над изделием (что соответствует длине дуги), оператор переключатели 2 переводит в режим 10 автоматического слежения, Измерительный орган 8, подключенный к электроду, установленному на рабочем органе 10, измеряет один нли несколько параметров режима сварки и, в зависимости от направ ления и величины отклонения этих параметров от установленных значений, в блоке коррекции 9 формируются команды на отработку их приводом 3. Информация об этих перемещениях параллельно с инфор мацией, задаваемой оператором вручную по остальным координатам с датчиков положения 4, через блок коммутации 5 поступает в блок памяти 7. В зависимости от расположения сварного шва в простран стве оператор может подключить к блоку коррекции 9 любой из приводов 3. Воспроизведение программы осуществляется известными методами.30 Применение изобретения позволяет повысить точность записи программы, так как сокращается количество координат ручного управления за счет перевода некоторых функций слежения за сварочным швом в автоматический режим с последующим автоматическим формированием прогр аммы. Формула изобретенияУстройство для программного управления промышленным роботом, содержащее пульт ручного управления и последовательно соединенные приводы, датчики положения, блок коммутации и элемент сравнения, выход которого подключен ко входу приводов, связанных с рабочим органом, выход блока памяти соединен с одним из входов блока коммутации, а вход - с одним из выходов блока коммутации, отличающееся тем, что, с целью повышения точности, устройство содержит переключатели и последовательно соединенные измерительный орган и блок коррекции, выход которого подключен к соответствующим входам переключателей, другие входы которых соединены с соответствующими выходами пульта ручного управления, а выходы переключателей подключены к одному из входов приводов.
СмотретьЗаявка
2458939, 01.03.1977
КИЕВСКИЙ ИНСТИТУТ АВТОМАТИКИ ИМ. 25 СЪЕЗДА КПСС
СЕРГАЦКИЙ ГЕОРГИЙ ИВАНОВИЧ, ФЕДОРОВ ВАЛЕРИЙ СЕРГЕЕВИЧ, ЛИНКИН ГЕННАДИЙ АНДРЕЕВИЧ
МПК / Метки
МПК: B25J 9/00
Метки: программного, промышленным, роботом
Опубликовано: 30.08.1978
Код ссылки
<a href="https://patents.su/2-621571-ustrojjstvo-dlya-programmnogo-upravleniya-promyshlennym-robotom.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для программного управления промышленным роботом</a>
Устройство для контроля неодновременности коммутации релейных блоков

Номер патента: 1166066
Опубликовано: 07.07.1985
Автор: Широков
МПК: G05B 23/02
Метки: блоков, коммутации, неодновременности, релейных
...соответственно первого и второго триггера, введены блок сложения по модулю два и блок задержки, подключенный входом к выходу первого элемента И, а выходом - к первым входам второго и третьего элементов И, соединенных вторыми входами с выходом блока сложения по модулю два, подключенного первым входом к входу первого элемента НЕ и к третьему входу второго элемента И, а вторым входом - к входу второго элемента НЕ и к третьему входу третьего элемента И.На фиг, 1 представлена функциональная схема устройства; на фиг, 2принципиальная схема одного из вариантов блока задержки; на фиг. 3 - график зарядки конденсатора блока задержки и импульса на выходе этого блока.Устройство содержит релейные блоки 1 и 2, раэновременнрсть срабатывания...
Устройство для контроля и коммутации резервных блоков

Номер патента: 1252782
Опубликовано: 23.08.1986
Авторы: Курочкин, Лещенко, Смирнов
МПК: G06F 11/10, H05K 10/00
Метки: блоков, коммутации, резервных
...сигнала ца выходе 13 блока и дальнейшие переключения сч.тчикон блокируются.Рассмотрим работу блока 7 управления. В исходном состоянии сигналом цдчдльцой установки триггер 36 устанавливается в состояние 1 , в результате разблокируется элемент И 34 и разрешается выдача стробов С цд выход 14 блока управления. Элемент И 38 блокирован цулевнм сигндлом с инверсного выхода триггерд 36. Нд фиг.4 показано распределение фронтов и периодов следования импульсов С и С 2, Длительность импульсов С выбирается достаточной дпя завершения переходных процессов в блоках 1 - 3 и элементах формирования контрольных сигналов длительность строба С 2 - достаточной для переключения коммутаторов и выработки контрольных сигналов, Интервал , выбирается достаточным для...
Устройство контроля координатных соединителей в блоке коммутации

Номер патента: 1575323
Опубликовано: 30.06.1990
Авторы: Бебрис, Володенок, Сидяков, Силантьев
МПК: H04M 3/22
Метки: блоке, коммутации, координатных, соединителей
...первый и второй блоки 3 и 4 управления, первый и второй блоки 5 и 6 отключения, состоящие из элементов И 7, блок 8 задержки, блоки 9 смещения и блок 10 коммутации, образованный элементами 11 коммутации, состоящими из диода 12 и реле 13.Устройство контроля контактных соединителей в блоке коммутации работает следующим образом.В исходном состоянии на управляю- . щий вход устройства поступает напряжение, соответствующее логическому нулю, первый и второй блоки 3 и 4 закрыты и через элементы 11 ток не протекает. Для включения элементов 11, обеспечивающих санкционированное соединение, на вход устройства подается логическая единица на вторые информационные входы первого и второго блоков 5 и б, состоящих из элементов И 7, и на управляющий вход...
Блок переключателей с индикацией положения каждого переключателя

Номер патента: 691949
Опубликовано: 15.10.1979
Авторы: Бульбочка, Смирнов, Шаталов
МПК: H01H 21/36
Метки: блок, индикацией, каждого, переключателей, переключателя, положения
...1 показана кинематическая схема предлагаемого блока переключателей; , на фиг. 2 схематически изображен элементпредлагаемого блока в разрезе.В блоке переключателей на валу 1, имеющем винтовую нарезку, установлена каретка 2 с возможностью ее перемещения вдоль упомянутого вала по его винтовой 2 нарезке. На неподвижную ось 3 свободнонасажены роторы 4, 5 переключателей, выполненные в виде шестерен с установленными на них щетками (не показано). На каж69949 Формула изобретения Фиг,ф здый ротор насажен циферблат 6 для индикации положения каждого переключателя.На печатных платах 7, 8 размещены неподвижные контакты и схемные элементы.На валу 9 подвижно установлен связанныйс кареткой 2 кулачок 10 с воэможностьюперемещения вдоль этого вала. Осевые...
Устройство для моделированияэлектронных cxem

Номер патента: 813440
Опубликовано: 15.03.1981
Авторы: Болотов, Велигурский, Волошаненко, Домбровский, Новиков
МПК: G06N 7/08
Метки: моделированияэлектронных
...регистра 12в сумматоры 14 - 14,в исходном состоянииустановки. Число, записанное в регистре 12в дополнительном коде, определяет интервал времени моделирования, передачи в сумматоры 14, - 14 . чисел (по команде отработки интервала) из соответствующихсчетчиков 111 - 11 где они суммируютсяс числом, занесенным ранее из регистра 12.При этом возможны две ситуации.а) Число в регистре 12 больше числа водном из счетчиков 11, - 11 . В этом елучае сумма этих чисел будет меньше нуляи на выходе знакового разряда этого сумматора 14 выработается сигнал, запрещающий прохождение импульсов от генератора9 на соответствующий реверсивный счетчик 16. Этот же сигнал поступает на элемент 15 И и сигнализирует об окончании работы данного преобразователя...
Предыдущий патент: Устройство для программного управления промышленным роботом
Следующий патент: Кисть промышленного робота
Случайный патент: Многодисковая фрикционная муфта