Суярко
Устройство управления

Номер патента: 1262496
Опубликовано: 07.10.1986
Авторы: Павлов, Решетников, Суярко, Тимонькин, Ткаченко, Харченко
МПК: G06F 9/22
...состояние триггеры 5 и 6 (фиг. 1).Через элемент И 7 с выхода генератора 4 синхроимпульсов начинают поступать тактовые импульсы заданной частоты. Они поступают на первый вход синхронизации блока 3 коммутации и счетный вход счетчика 2. После записи в счетчик 2 первого импульса появляется единичный сигнал на его выходе 20. 5 10 15 20 25 30 35 40 45 50 55 Когда в счетчик 2 запишется К, импульсов (К - коэффициент пересчета), происходит выдача сигнала переполнения на выходе 19, По этому сигналу срабатывает следующий разряд счетчика 2 и далее работа продолжается до тех пор, пока на выходе 22 блока 3 коммутации не появится сигнал, который поступает в блок 1 и произ. водит останов или перезапуск схемы. Это происходит следующим образом....
Устройство для контроля двух импульсных последовательностей

Номер патента: 1257649
Опубликовано: 15.09.1986
Авторы: Павлов, Суярко, Тимонькин, Ткаченко, Харченко
МПК: G06F 11/16
Метки: двух, импульсных, последовательностей
...устройства в работу - установку триггера 2 в единичное состояние.Пусть первым поступает импульсна вход 10 устройства (см.фиг,2).Этот импульс проходит через открытые 5элементы И 4 и 6 на вход Б триггера1 и устанавливает его в единичноесостояние. Одновременно этот импульспроходит через элемент ИЛИ 8 на синхровход триггера 1 и объединенные1 О3- и С-входы триггера 2. По заднемуфронту этого импульса триггер 2 переключается в единичное состояние исвоими выходными сигналами закрываетэлементы И 6, 7, разрешает работутриггера 1 по счетному входу (подавединичный сигнал на входы Л и К триггера 1) и открывает коммутатор 3. Переключения триггера 1 по заднемуфронту этого импульса не происходит,так как в момент окончания импульсана входах 3 и К...
Устройство для контроля и управления

Номер патента: 1255997
Опубликовано: 07.09.1986
Авторы: Павлов, Решетников, Суярко, Тимонькин, Ткаченко, Харченко
МПК: G05B 23/02
...проходящим через элемент И 16, отключаются исполнительные устройства, и триггер8 вновь устанавливается в единичноесостояние, Далее устройство работает аналогично.В ходе функционирования устройства осуществляется контроль величины Т и правильности реакции объектана сформированное управляющее воздействие,Блок 4 контроля реакций обеспечивает подсчет числа импульсов, поступающих от объекта контроля после выдачи управляющего воздействия и контроль соответствия их полярности сформированному управляющему воздействию. Этот блок работает следующим образом (фиг.5 и 6). После поступ ления единичного сигнала на вход синхронизации в счетчик 54 по импульсу, сформированному одновибратором 58, заносится код о величине 7, поступающий на входы...
Устройство для контроля и управления технологическим процессом

Номер патента: 1241198
Опубликовано: 30.06.1986
Авторы: Власенко, Кокорев, Павлов, Суярко, Тимонькин, Ткаченко, Харченко
МПК: G05B 23/02
Метки: процессом, технологическим
...исчезновения сигнала"Запись Ко. " на инверсном выходетриггера 16 в счетчике 2 формируетсячисло, пропорциональное величине те,Код числа, пропорциональный тек,поступает на входы делителя 8, опре 1241198деляя его коэффициент деления. Делитель 8 производит умножение величины Ктек нат. е, определяет 8 (см, формулу 2). Операция умножения производится аналогично описанной для делителя 6.Импульсы свыхода делителя 8 пос-. тупают через элемент 24 ИЛИ на суммирующий вход счетчика 3. На вычи тающий вход счетчика 3 через делитель 13,элементы 25 ИЛИ,21 И поступают импульсы от датчика линейных перемещений правильной машины, количество которых пропорционально величине Й .Про хождение импульсов на вычитающий вход счетчика 3 через элемент 24 ИЛИ...
Цифровое устройство для программного управления

Номер патента: 1149220
Опубликовано: 07.04.1985
Авторы: Павлов, Решетников, Суярко
МПК: G05B 19/18
Метки: программного, цифровое
...схема Формирователяимпульсов; на фиг. 3 - зависимостьамплитуды аналогового сигнала А навыходе преобразователя код - аналогот рассогласования по перемещению 8пропорциональному разности числа задающих импульсов и числа импульсовобратной связи. Устройство содержит блок 1 зада"ния программы, .формирователь 2 импульсов, сумматор Э,. дешифратор 4, делители 5-10, первые и вторые элементы И 11-13 и 14-1 б первый 17 и второй 18 элементы ИЛИ и реверсивный счетчик 19 импульсов, преобразователь 20 код - аналог, усилитель 21 электродвигатель 22 постоянного тока И датчик 23 перемещения (обратной связи).Формирователь 2 импульсов фиг.2) содержит счетчик 24 импульсов, блок 25 совпадения, генератор 26 импуль" сов ключ 27,3 1149Устройство работает...
Устройство для программного управления подачей длинномерного материала в рабочую зону обрабатывающей машины

Номер патента: 1092482
Опубликовано: 15.05.1984
Авторы: Белов, Кокорев, Павлов, Суярко
МПК: G05B 19/00
Метки: длинномерного, зону, обрабатывающей, подачей, программного, рабочую
..."Запись"; на Фиг.4 временные диаграммы изменения скорости обрабатьвающего материала,Устройство для программного управления подачей длинномерного материала в рабочую зону обрабытывающей машины содержит задатчик 1 величины подачи, реверсивный счетчик 2командный блок 3, привод 4, состоящий из усилительно-преобразовательного каскада 5 и двигателя 6 с датчиком 7 тока, датчик 8 величины подачи с мерительным роликом 9, взаио О действующим с материалом 10 (полосой или лентой), блок 11 возведенияв квадрат, источник 12 напряжения,величина которого пропорциональна,квадрату номинального тока,двигателя, блок 13 сравнения, интегратор 14,уль-орган 15, элемент И 16. Двигатель 6 связан с подающими валками 17и 8, у которых установлен исполнительный...
Устройство для поддержания постоянной скорости резания при торцевой обработке

Номер патента: 1054020
Опубликовано: 15.11.1983
Авторы: Павлов, Суярко
МПК: B23Q 15/10
Метки: обработке, поддержания, постоянной, резания, скорости, торцевой
...движения, электропривод 2 подач 10 15 20 25 30 35 40 45 50 55 режущего инструмента и блок 3 управления скоростью резания, включающий задатчик 4 скорости резания, преобразовательный каскад 5 и датчик 6 положения инструмента.Преобразовательный каскад 5 выполнен в виде последовательно включенных цифро-аналогового преобразователя 7, вход которого подключен к выходу задатчика 4 скорости резания, формирователя 8 сигнала управления и эмиттерного повторителя 9.Формирователь 8 сигнала управления выполнен на резисторах 10 - 17, включенных в цепь нагрузки цифро-аналогового преобразователя 7 параллельно друг другу через электронные ключи 18 - 25, цепи управления которых подключены к датчику 6 положения инструмента, жестко связанного с механизмом...
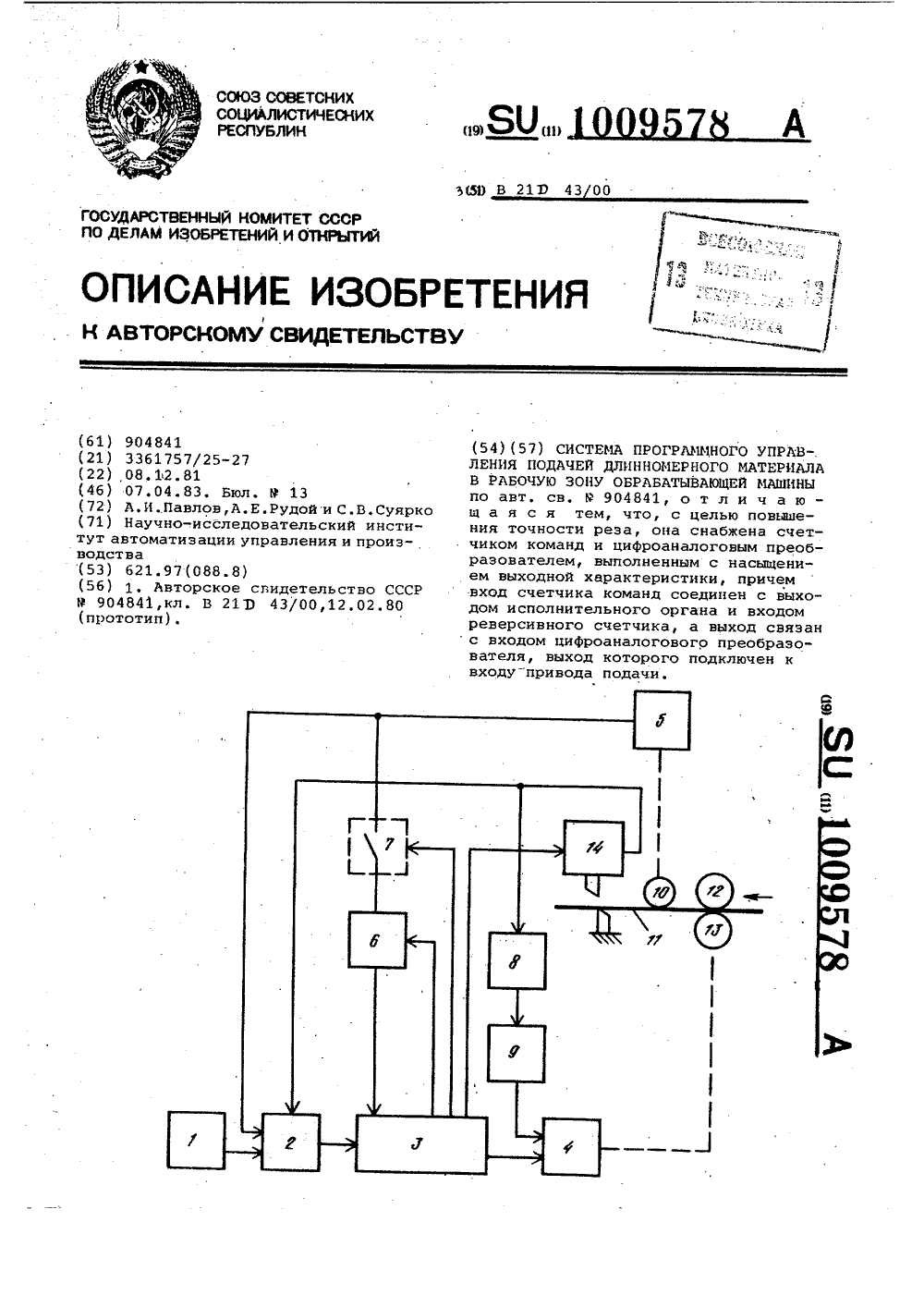
Система программного управления подачей длинномерного материала в рабочую зону обрабатывающей машины
Номер патента: 1009578
Опубликовано: 07.04.1983
МПК: B21D 43/00
Метки: длинномерного, зону, обрабатывающей, подачей, программного, рабочую
...(задающего напряжения), поступающего на привод 4 подачи в фуикции остатка пути отработки после ф-го количества срабатываний,исполнительного органа обрабатывающей машины, выбирается такой, чтобы при максимальном тормозном моменте двигателя привода 4 и минимальном приведенном маховом моменте отработка заданного размера производилась беэ превышения установленной погрешности отработки (ЬЬ).В процессе отработки первоначальной заготовки зависимость задающего напряжения в функции остатка пути будет смещена (по сравнению с аналогичной зависимостью при отработке И -ой заготовки по оси ординат вниз (т.е. в сторону уменьшения). Величина этого смещения выбирается такой, чтобы при минимальном тормозном моменте двигателя привода 4 подачи и...
Система погрузки и выгрузки грузов для летательного аппарата

Номер патента: 726787
Опубликовано: 15.01.1983
Авторы: Богайчук, Золотаренко, Иванов, Савчук, Сердечный, Суярко
МПК: B64D 9/00
Метки: аппарата, выгрузки, грузов, летательного, погрузки
...на крайних откидныхбалках. 5На фиг. 1 изображена система погрузки и выгруэкц грузов, вид сверху; на фиг. 2 - сечение А-А на фиг. 1; на фиг, 3 - летательный аппарат с Установленной на нем системой погрузки и выгрузки грузов, поперечный разрез; на фиг. 4 - привод с гибким тяговым органом и обводными и направляющими блоками; на фиг. 5 - захват гибкого 15тягового органа. Система погрузки и выгрузки грузовсодержит шарнирно связанные с полом 1 летательного аппарата 2 откидные балки 3, несущие секции роликсвых дорожек 4 и боковых рельсов 5 с замками б, привод 7 с гибким тяговым органом 8 и захватом 9 для груза 10. Кроме того, на откидных балках 3 установлены секции направляющих 11 для гиб кого тягового органа 8, установлейныемежду...
Система программного управления механизмом подачи токарного станка

Номер патента: 972474
Опубликовано: 07.11.1982
Авторы: Павлов, Суярко
МПК: G05B 19/26
Метки: механизмом, подачи, программного, станка, токарного
...Командный блок 3 вы рабатывает команды для управления процессом перемещения механизма подачи, обеспечивая преобразование цифрового сигнала, поступающего из рассогласователя 2, в аналоговый для управления при 45 водом 4 подачи. Датчик 5 величины перемещения вырабатывает сигнал, пропорциональный величине перемещения механизма подачи, и подает его в рассогласователь 2, который работает в режиме вычитания50 и на выходе имеет число, соответствующее оставшемуся пути. Если это число стано-; вится равным нулю, командный блок 3 вырабатывает сигнал на отключение привода 4 подачи.55При нагреве обрабатываемого изделия 7 его общая длина увеличивается, что вызывает смещение пиноли 14 на некоторую формула изобретения Система программного управления...
Устройство для поддержания постоянной скорости резания при торцовой обработке изделий на станках

Номер патента: 963806
Опубликовано: 07.10.1982
Авторы: Павлов, Суярко
МПК: B23Q 15/10
Метки: обработке, поддержания, постоянной, резания, скорости, станках, торцовой
...скорости11 и тахогенератора 9 подается на вход ЗО силового усилителя 12, выход которо;о20 25 30 35 подключен к якорным зажимам электродвигателя главного двцжсцця 10, обеспечцвакщего через редуктор 13 вращательное движение цлацшайбс 14 и обрабатываемому изделию 15.Г 1 араллельцо к якорю тахогенератора 9 обратной связи подключен потенциометр 16, выход которого черкез диод 17 соединен с обмоткой возбуждения 8 тахогенератора 9. Диод 18 включен в цепи выхода усилителя 7, причем встречно с диодом 17,При уменьшении диаметра обработки, контролируемого датчиком положения 4, уменьшается выходной слгнал преобразовательного каскада 6, а следовательно, и выходной ток усилителя 7, т, е. ток в обмотке возбуждения 8 тахогенератора 9. Это...
Система программного управления подачей длинномерного материала в рабочую зону обрабатывающей машины
Номер патента: 904841
Опубликовано: 15.02.1982
Авторы: Павлов, Покровский, Суярко, Тищенко
МПК: B21D 43/00
Метки: длинномерного, зону, обрабатывающей, подачей, программного, рабочую
...управления приводом подающего органа работает следующим образом.Задатчиик 1 величины подачи подает сигнал, содержащий информацию о величине подачи материала 9, в реверсивный счетчик 2. 10Цифровой сигнал из реверсивного счетчика 2 поступает в блок управления 3. Блок управления 3 преобразует цифровой сигнал в аналоговый, который поступает в привод 4. Привод 4 приводит в движение подающие валки 10 и 11, которые перемещают материал 9 (полосу или ленту) на шаг Т подачи в рабочую зону ножниц 12. Ролик 8 при взаимодействии с материалом 9 вращается и приводит в движение датчик 5 величины подачи. Датчик 5 величины подачи вырабатывает сигнал, пропорциональный углу поворота ролика 8, и подает его в реверсивный счетчик 2, который работает в...
Система программного управления подачей длинномерного материала
Номер патента: 665289
Опубликовано: 30.05.1979
Авторы: Павлов, Суярко, Тищенко
МПК: G05B 19/26
Метки: длинномерного, подачей, программного
...материала 10.Регулируемый привод 4 подачи при подо мощи валков 11 и 12 отрабатывает задан3ное перемещение обрабатываемого матерна. ла, в результате чего приводится во вращение ролик 13, а следовательно, датчик 5 величины подачи,Сигналы от датчика 5 поступают на вычитающий вход основного реверснвшн о счетчика 2.После отработки заданной величины подачи командный блок 3 вырабатывает сигналы на замыкание ключевого устройства 7 и с определенной выдержкой времени на срабатывание ножниц 9. Этим выявляется величина перебега обрабатываемого материала. При появлении такого перебега на вычитающий вход дополнительного реверсивного счетчика 6 подается информация о величине перебега. Таким образом, к началу следующего раза в дополнительном...
Устройство для программного управления пружинонавивочной машиной

Номер патента: 554916
Опубликовано: 25.04.1977
Авторы: Власенко, Суярко, Тищенко
МПК: B21F 35/00
Метки: машиной, программного, пружинонавивочной
...в регистре 13 основной памяти(при навивке первой пружины в регистре13 записан "О") заданию в задатчике 7длины передних крайних витков ца вы".Одеблока 12 возникает импульс переноса, который совместно с соответствующим сигналом)блока синхронизации 3, включает шаговыйпривод 11 механизма шагообраэования. Механизм шаговой лапки начинает вводитьсяс определенным отставанием, Навиваются1Передние переходные витки, Отставание механизма шаговой лапки фиксируется конечным выключателем 20 исходного положения механизма шаговой лапки, Величинаотставания (текушая ошибка) вычисляетсяв блоке 12 и запоминается в регистре 14вспомогательной памяти,При равенстве суммы текущего размераи числа в регистре 13 основной памятисумме заданий длины передних крайних...
Устройство для поддержания постоянной скорости резания при торцевой обработке изделий на станках

Номер патента: 540720
Опубликовано: 30.12.1976
Авторы: Борденко, Дубров, Павлов, Суярко
МПК: B23Q 5/10
Метки: обработке, поддержания, постоянной, резания, скорости, станках, торцевой
...постоянная. Анализируя выражения (1) и (2), приходим к выводу, что при соблюдении пропорциональ(2) ной зависимости между обрабатываемым диаметром Й и потоком возбуждения тахогенератора Ф, скорость резания о будет пропорциональная Е а так как Е, остается неизменной (в связи с постоянным задающим напряжением), скорость резания также не будет изменяться.Для компенсации нелинейности кривой намагничивания тахогенератора при линейных характеристиках преобразовательного каскада б и усилителя 7 во входной цепи последнего включен источник постоянного напряжения, выделяемого на части резистора 16, действующего встречно с сигналом управления, поступающим от преобразовательного каскада 6,На фиг. 2 представлены совмещенные характеристики кривой...
Устройство для программного управления станком

Номер патента: 504178
Опубликовано: 25.02.1976
Авторы: Белов, Борденко, Кокарев, Суярко, Тищенко
МПК: G01R 31/28, G05B 19/406, G05B 23/02 ...
Метки: программного, станком
...Блок контроляобратной связи содержит две зарядные емкости, одна из которых соединена черезключ с выходом первого блока дифференцирования и через диод со входом регуляторатока разряда, а другая емкость соединеначерез второй ключ с выходом второго бло504178. Тираж ФУ И Государственного ко по делам изобр 5, Москва, Ж, Раушет сигналов, т.е. обратная связь по положению отсутствует. В подобной ситуации цепь блоков 8,103.1 блокируется цепью блоков 15,12,10. Нуль-орган 13 удерживает ключ 5 в замкнутом состоянии. Величину ем кости 17 выбирают такой, чтобы она не разрядилась до уровняОпри выборке люфта. При появлении импульсов обратной связи начинается периодический процесс заряда-разряда емкости 16, и привод продолжа й ет работать.Зашита от...
Индуктивный датчик

Номер патента: 135371
Опубликовано: 01.01.1961
Автор: Суярко
Метки: датчик, индуктивный
...от известных закл 1 очается в том, что для устранения люфтов применен моментный двигатель, встроенный в датчик, а первичная обмотка, уложенная в пазы статора, является обшей для датчика и двигателя.На чертеже изображен описываемый прибор.Между статором 1 датчика установлен статор 2 моментног двигателя. В пазы всех трех статоров заложена общая трехфазная первичная обмотка 3. На статоры датчика намотаны отдельные вторичныебмотки 4, которые используются для генерирования числа импульсов. пропорциональных углу перемещения вала 5 ротора 6. На вал датчика между его роторами устанавливается дополнительньш ротор 7 момент- ного двигателя, В зависимости от конкретных требовачнй к габаритам датчика и форме механической характеристики...
Устройство для автоматического регулирования электропривода

Номер патента: 127735
Опубликовано: 01.01.1960
Авторы: Суярко, Тупицин
МПК: H02P 5/06
Метки: электропривода
...5 оченную по известной схеме динамичсского моста стабилизации, содержащего сопротивлеп 5 1 СД, 2 СД и 1 СП.. гя улучшения динамических свойств системы регулировки путеослабления действия гибкой отрицательной обратной связи при резких возмущениях в системе обмотка ОС шунтирована нелинейным сопротивлеиисм С 11, величина которого уменьшается при увеличении приложе:1- ного напряжения. Аналогичное действис может быть получено присоединением параллельно стабилизирующей обмотке ОС известного узла отсечки, состоящего из потенциометра 2 СП и комплекта вентГей ВТ, В оооих случаях при больших,рассоглясовяниях напряжения ток в стаби,НзируОцс Й ОбОткс ОС будет незначительным, так как избыточная егоЛо 127735 часть оудет отводиться 11 елинейным...
Устройство для управления периодической подачей

Номер патента: 126714
Опубликовано: 01.01.1960
Авторы: Маевский, Суярко
МПК: B23D 7/00
Метки: периодической, подачей
...к очередному счету.Если по какой-либо причина счетный узел своевреме:шо цс сработал (например, поломка переключателя ПК, то прекращение подачи будет осуществляться уже це в функции пути, а в функции времени зя счет возрастания потенциала ца смкостп С временного узла. Таким образом, счетный узел устройства оперативный, а временной узел - защитный.Изменение величины подачи досгигается одновременным из Нс;- ем положения потенциометра П, и сопротивления Р 1, которые управляются одной рукояткой и одновременно настраивают и счетный и врсмсцОй узлы на новую подачу. В пслях повышения надежности схемы рслс П работает на отключение.В предлагаемом устройстве вместо контактного псрсключи сля ПК м 05 кет Оь ь также использОВяц и бесконтактный...