Устройство для измерения массы нетто
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1502964
Авторы: Головач, Руденко, Токарчук, Храковский







Текст
(19) (11)4 С 01 С 19/02 ГОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТНРЫТИПРИ П(НТ СССР ОПИСАНИЕ ИЗОБРЕТЕНИ оиэводс и 1Месов,вы% 3 щй ю А ВТОРСКОМУ СВИДЕТЕЛЬСТВ(56) Шварцман Г.М. Пртво древесностружечных пл 1976, с. 311.Авторское свидетельство СССР )(ф 792083, кл. С 01 С 9/02, 1979.(54) УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАССЫНЕТТО(57) Изобретение относится к весоиз мерительной технике и может бытьиспользовано при производстве древесностружечных плит и для автоматиэа"ции технологических процессов в промышленности. Целью изобретения является повышение надежности и удобстваэксплуатации. Устройство содержитплатформу 1, соединенный с ней силоизмерительный датчик 2, кодовые знаки в виде меток 5 и 6, блок 7 управления с вычислительным блоком 10,выполненным в виде микроЗВМ, блввода массы, генератор 12 импульдатчики ввода 16, движения 17 ихода 18 поддона, формирователи 21и 22 сигналов, счетчики 23 и 24 меток и ориентировщик. 1 з.п. ф-лы,5 нл,3 1502964Изобретение относится к весоизмерительной технике, в частности кустройствам, в которых определяетсямасса движущегося объекта, и можетбыть использовано при производстведревесностружечных плит,Целью изобретения является повышение надежности и .Удобства эксплуатации. 10На фиг. 1 изображено взаимноерасположение элементов устройствадля определения массы стружечногопакета на поддоне, на фиг. 2 - принцип, положенный в основу устройства 15для определения массы стружечногопакета на поддонеф, на фиг. 3 - блоксхема блока ввода массы, на фиг. 4 -принципиальная электрическая схемаблока ввода массы, на фиг. 5 - кинематическая схема ориентировщика.Устройство для измерения массынетто стружечного пакета на поддонесодержит горизонтальную платформу 1,соединенный с ней с оизмерительньй 25датчик 2, кодовое приспособление 3,включающее нанесенные на поддоне 4метки калибровочную 5 и веса 6, блок7 управления, включающий коммутаторы8 и 9, вычислительное устройство 10, 30выполненное в виде микроЭВМ, блок 11ввода массы, содержащий генератор 12импульсов, логические элементы И13-15, датчики ввода 16, движения17, выхода 18 поддона, а также датчики калибровочной 19 и весовой 20 меток, формирователи 21 и 22 сигналови счетчики 23 и 24 меток, причем выходы датчиков 19 и 20 меток подключены к вторым входам формирователей 21 щи 22 сигналов меток, кроме того, сих первыми входами связан выход датчика 16 ввода поддона, а выход датчика 17 движения соединен с вторым входом первого элемента И 13, первый 45вход которого соединен с выходомгенератора 12 импульсов, а выход первого элемента И 13 соединен с вторыми входами второго 14 н третьего 1 Ьэлементов И, первые входы которыхподключены к выходам формирователей21 и 22 сигналов меток, а выходыформирователей 21 и 22 сигналов меток подсоединены к входам счетчиков23 и 24 меток, причем выходы последних соединены с информационными входами первого коммутатора 8 блока 7 управления, адресные входы которогосоединены с соответствующими выходами вычислительного устройства 10 (микроЗВМ), один из входов которого связан с выходом датчика 18. выхода поддона, а еще один вход вычислительного устройства 10 соединен с вторым коммутатором 9 блока 7 управления.Ориентнровщик 25 выполнен в виде каретки 26 с установленными на ней роликами 27 и 28 и блоком 29 датчиков, причем каретка 26 соединена через ось 30 и пружину 31 с одним концом стержня 32, второй конец которого через вторую ось 33 и пружину 34 соединен со струбциной 35, с которой связан ограничитель 36 поворота стержня 32.Устройство работает следующим образом.При движении поддона 4 по конвейерной линии он подходит к ориентировщику 25 и соприкасается с роликами 27 и 28. В результате соприкосновения с роликами 27 и 28 каретка 26 устанавливается параллельно боковой кромке поддона 4.При смещении поддона 4 перпендикулярно его продольной оси в горизонтальной плоскости стержень 32, пово-рачиваясь вокруг оси 33, обеспечивает отслеживание .положения кромки поддона.При перекосе поддона 4 в горизонтальной плоскости относительно продольной оси каретка 26 поворачивается вокруг оси 30, сохраняя занятое положение относительно кромки поддона 4.Пружины 31 и 34 обеспечивают соответственно возврат каретки 26 и стержня 32 в исходное состояние.Струбцина 35 совместно с болтами 37 и 38 предназначена для быстрого закрепления ориентировщика на установочном месте.Таким образом, в результате совместной работы элементов ориентировщика 25 блок 29 датчиков с датчиками 16, 19 и 20 находятся в строго заданном положении относительно кромки и нижней плоскостч поддона 4, 1После ориентирования относительно поддона 4 срабатывает датчик 16 ввода поддона, подготавливая формирователи 21 и 22 сигналов для приема соответствующей информации.Прн дальнейшем движении поддона 4 в зоне действия датчика 19 появляется калибровочная метка 5. Датчик 1930 К 21иК( кф Кй где и Ри макс Ри мин 2 Я 5 15формирует сигнал с появлением калибровочной метки 5. Этот сигнал, сформированный формирователем 21, поступает на первый вход схемы И 13, навторой вход которой с генератора 12импульсов поступает серия импульсов,частота которых прямо пропорциональна скорости движения поддона 4.От момента появления сигнала метки 5 калибровочной и до момента исчезновения сигнала наличия поддона сдатчика 16 с выхода первой схемы И13 на вход первого счетчика 23 поступают калибровочные импульсы, числокоторых и( устанавливается в соответствии с диапазоном возможных изменений веса поддонаР макс Ри мингде ДР- диапазон изменения весаподдона;Р - максимально возможный весьоксподдона;Р - минимально возможный весМИИподдона.В свою очередь, имеется прямо пропорциональная эависимисоть между весом поддона Р и расстоянием от калибровочной метки 5 до конца поддона 4:и ( кгде К- коэффициент пропорциональности, устанавливающий прямую зависимость между мернойдлиной на поддоне и диапазоном изменения веса поддона,1 - расстояние от калибровочнойметки до конца поддона,Отсюда очевидна зависимость междудиапазоном возможного изменения весаподдона Ь Ри числом импульсов икгенератора 12Кгде К - коэффициент пропорциональТности,и - количество калибровочныхкимпульсов.Из изложенного следует зависимость После прекращения подачи импульсов от генератора 12 на вход счетчика 23 последний хранит информацию о 02964 6количестве калибровочных импульсовв параллельном двоично-десятичномкоде.5При дальнейшем движении поддона4 в зоне действия датчика 20 появпоявляется метка 6 веса поддона. Датчик 20, формирователь 22, схема И 13разрешают поступление импульсов ге нератора 12 на вход счетчика 24 весового. Импульсы генератора 12 поступают на вход счетчика 24 до момента выхода поддона иэ зоны действиядатчика 16 наличия поддона.15 Таким образом, прекращение подачиимпульсов с генератора 12 на входысчетчиков 23 и 24 происходит одновременно.Счетчик 24 также хранит информа цию о количестве импульсов, принятыхот генератора 12 с момента появленияметки 6 веса. Информация в счетчике24 также хранится в параллельномдвоично-десятичном коде.25 Для определения веса поддона используется информация, накопленнаяв счетчиках 23 и 24 калибровочноми весовом. Вес поддона вычисляетсяна микроЭВМ 10 по формуле ЬРР = Р иек где Р - искомый вес поддона,Р - максимально возможный весМОФ35 поддона;ЬР - постоянная, определяющаядиапазон возможных изменений веса поддона,и - количество калибровочныхк40 импульсов,и - количество весовых импульВсов,Информация и к и иВ соответственно от счетчиков 23 и 24 в двоично 45 десятичном коде по программе вводится в микроЭВМ 1 О.После ввода информации о численных значениях ик, и в микроЭВМ 1 Опо последней из приведенных формулпроизводятся вычисления,в результате которых получается искомый веснетто поддона Р. Вес нетто поддона Р, полученный в результате вычисления, записывает" ся в специальную ячейку памяти микро- ЭВМ 10 для производства дальнейших вычислений по определению массы нетто стружечного пакета.15 ЬРн 1 лгде Р - вес нетто стружечного панчкета,Р - вес брутто стружечного паБкета с поддоном;Р - нес поддона фактический,вГенератор 12 импульсов (фнг, 4)представляет собой импульсный тахогенератор, частота следонания импульсов которого прямо пропорциональнаскорости движения поддона 4. Микросхема ДД 1 (К 17 ЛИ 1) включает в себялогические элементы И 13-15. ЭлементыК 1, К 4, ЧР 1, Ч 1, К 6, К 7, ЧТ 1, К 8составляют Формирователь 21 сигналов 455055 Ввод информации со счетчиков 23 и 24 производится н двоично-десятичном коде поочередно. Очередность ввода определяется коммутатором 8, который по команде от микроЭВМ 1 О подключает сначала выходы счетчика 23, а затем - выходы счетчика 24.Коммутатор 9 так же, как и коммутатор 8 управляется микроЭВМ 10 и предназначен для формирования команд переключения микроЭВМиз режима ввода цифровой информации в режим ввода аналоговой информации. Цифровая информация принимается со счетчиков 23 и 24, аналоговая информация - с силоизмерительного датчика 2 о весе брутто стружечного пакета.Таким образом, коммутатор 8 факти" чески определяет порядок обмена ин формацией с внешними устройствами, относительно к микроЭВМ 10, а коммутатор .9 определяет вид информации, поступающей на входы микроЭВМ 10, цифровой или аналоговый. 25После определения веса поддона 4 по команде от датчика 18 выхода поддона из зоны блока 11 ввода массы поддона производится взвешивание стружечного пакета брутто. При этом 30 пакет стружечный, находящийся на поддоне 4, транспортером (не обозначен) перемещается на горизонтальную платформу 1, соединенную с силоизмерительным датчиком 2, откуда информация о весе брутто стружечного пакета н аналоговом виде поступает на вход микроЭВМ 1 О.Таким образом, получив информацию о весе брутто стружечного пакета с 40 поддоном 4 и, сохранив информацию о фактическом весе поддона 4 микроЭВМ 10 вычисляет вес нетто стружечного пакета: датчика калибровочной метки. Элементы К 2, К 5, ЧП 2, Ч 2, К 9, К 10, ЧТ 2,К 11 составляют формирователь 22 сигналов датчика весовой метки,Датчики ввода поддона 16 метки калибровочной 19 и метки веса 20 представ-"ляют собой бесконтактные инфракрасные датчики. Датчик 17 движения поддона связан с движущимся поддономили с пускателем привода конвейераи на контакт Х 1:8 А выдает потенциал,разрешающий по входу 3 микросхемыДД 1 передачу импульсов с генератора12 на входы 4 и 11 микросхемы ДД 1.С выходов элементов И 14 и 15 (контакты 6 и 9 микросхемы ДД 1) сериикалибровочных и весовых импульсовпоступают на соответствующие счетчики 23 и 24, Последние и коммутаторы8 и 9 блока управления представляютсобой известные цифроные устройства, изготовленные на основе микросхем серии К 172 и К 561, К 512.Устройство для определения массы стружечного пакета на поддоне позволяет без установки вторых весов определить вес нетто стружечного пакета, необходимый для регулиронания поступающей массы дренесно-клеевой композиции при производстве древесностружечных плит. Однако данное устройство может найти применение для определения массы тары движущихся объектов, при автоматизации ряда других технологических процессов.Формула изобретения1. Устройство для измерения массы нетто, содержащее грузоприемную платформу с силоизмерительным датчиком, подвйжный поддон с кодовыми знаками, блок ввода массы тары, включающий два счнтывателя кода, два счетчика и логический элемент И, к первому входу которого подключен генератор импульсов, и вычислительный блок, о т л и ч а ю щ е е с я тем, что, с целью повышения надежности и удобства эксплуатации, в него введены ориентировщик, датчик скорости, связанный с поддоном, два датчика положения, два дополнительных логических элемента И, два формирователя сигналов и два коммутатора, при этом ныход датчика скорости подключен к второму входу элемен 9 1502964 та И, первый датчик положения и считыватели кода установлены на ориентировщике последовательно по ходу поддона, а второй датчик положения - на выходе блока ввода массы тары, выход первого датчика положения соединен с первыми входами формирователей сигналов, вторые входы которых подключены к выходам соответствующих О считывателей кода, а выходы - к первым входам второго и третьего элементов И соответственно, вторые входы которых объединены и соединены с выходомпервого элемента И, а выходы - 15 с информационными входами первого коммутатора, адресный вход которого объединен с адресным входом второго коммутатора и соединен с соответст 10вующим выходом вычислительного блока, к соответствующим входам которого подключены выход силоизмерительного датчика, выход второго датчика положения и выходы коммутаторов, причем кодовые знаки выполнены в виде цвух меток, нанесенных на продольной кромке поддона.2. Устройство по п. 1, о т л нч а ю щ е е с я тем, что в нем ориентировщик выполнен в виде рычага, каретки с двумя роликами, установленной на оси на одном конце рычага, струбцины с ограничителем поворота, установленной на другом конце рычага, и двух пружин, первые концы которых связаны с рычагом, а вторые - с кареткой и струбциной соответственно..Рогулич Техред М,Дидцк Корректор О.Ципл ак рак ЬЬ Заказ 507 одписное и ГКНТ СССР ВНИИПИ Государственного комитета по изобретениям и открыти 113035, Москва, Ж, Раушская наб д. 4/ оизводственно-издательский комбинат "Патент", г, Узгород, ул. Гагарина, 101
СмотретьЗаявка
4342361, 14.12.1987
УКРАИНСКОЕ НАУЧНО-ПРОИЗВОДСТВЕННОЕ ДЕРЕВООБРАБАТЫВАЮЩЕЕ ОБЪЕДИНЕНИЕ
РУДЕНКО ВАЛЕРИЙ ФЕДОРОВИЧ, ГОЛОВАЧ ВАЛЕНТИН МИХАЙЛОВИЧ, ХРАКОВСКИЙ АНАТОЛИЙ ИОСИФОВИЧ, ТОКАРЧУК НИКИФОР АРТЕМОВИЧ
МПК / Метки
МПК: G01G 19/02
Опубликовано: 23.08.1989
Код ссылки
<a href="https://patents.su/7-1502964-ustrojjstvo-dlya-izmereniya-massy-netto.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для измерения массы нетто</a>
Устройство для ввода информации в память микроэвм с общей шиной

Номер патента: 1290336
Опубликовано: 15.02.1987
Авторы: Астахов, Вашутин, Красильщиков, Лукьянов, Лунин, Рогожин, Стамболи, Тяпкин, Шкондин
МПК: G06F 13/00
Метки: ввода, информации, микроэвм, общей, память, шиной
...ДЗП через 400 нс ОЗУ формирует задний фронт сигнала ОТВ, ко 1торый, воздействуя на блок 3 управления, завершает цикл обмена, При появлении нового запроса на обмен информацией цикл записи повторяется,Блок 3 управления также работает в соответствии с временными диаграммами на фиг. 4. Согнал ГТ, указывающий на то, что данные и адреса готовы для передачи в микроЭВМ, ин 3 1290336сигналов (ОБМ, ОТВ, ДЗП), По окончании передачи информационного мас"сива устройство ввода информации впамять микроЭВМ формирует признакокончания обмена, инициирующий запуск процессора микроЭВМ на продолжение выполнения рабочей программы.При этом устройство прямого доступа в память микроЭВМ переходит в режим ожидания, запрещающий любой вид 10обмена с ОЗУ....
Древесной массы при изготовлении древесно-стружечных плит

Номер патента: 169241
Опубликовано: 01.01.1965
Авторы: Гельман, Дмитриев, Солечник, Тупицин, Эльберт
МПК: B27N 3/02
Метки: древесно-стружечных, древесной, изготовлении, массы, плит
...увеличение их количества имеет решающее значение для равномерного распределения и нанесения на стружку и для повышения водостойкости плит.В связи с тем, что дисперсцость распыла 25 зависит в первую очередь от отношения расходов парафина и воздуха и физических свойств парафина; вязкости, поверхностного натяжения, плотности, рекомендуется следующий режим. 30 Температура парафина должна быть 80 - 90 С. При этой температуре наблюдается наибольшее снижение вязкости и достигается уменьшение средцего объемно-поверхностного диаметра частиц парафина с 78 .ик прн 60 С до 44 як при 90 С (при отношении расходов парафина ц воздуха 0,22 кг/кг). Температура распыляющего воздуха в форсунке должна быть 130 - 150 С, а давление - 2,5 - 3,0 атм.Отношение...
Устройство для подачи на вход измерительной схемы сигналов постоянного тока с нескольких датчиков

Номер патента: 121682
Опубликовано: 01.01.1959
Автор: Шекриладзе
МПК: G08C 19/02, H03K 17/20
Метки: вход, датчиков, измерительной, нескольких, подачи, постоянного, сигналов, схемы
...датчиков. Катушки каждого следующего генератора сдвинуты относительно соответствующих катушек предыдущего генератора на 120, соединены между собой параллельно и вместе с включенными последовательно с ними диодами Дл, - Лд а - ДА з, Ды - Ль.а - Дъ з и т. д. образуют трехфазный выпрямитель, пающий на выходе напряжение Ье. Генераторы Ги Уз создают синусоидально изменяющееся напряжение. Генератор Г, имеет полоса специальной формы, которые обеспечивают получение провала на положительной полуволне.Напряжение бснимаемое с каждого трехфазного вьраспределяется между двумя сопротивлениями Р, и Р 2, созд121682 падения напряжения У, и У. Напряжение У выше входного напряжения У подаваемого от соответствующего датчика, в результате чего у диода Д...
Устройство для ввода в микроэвм дискретных сигналов
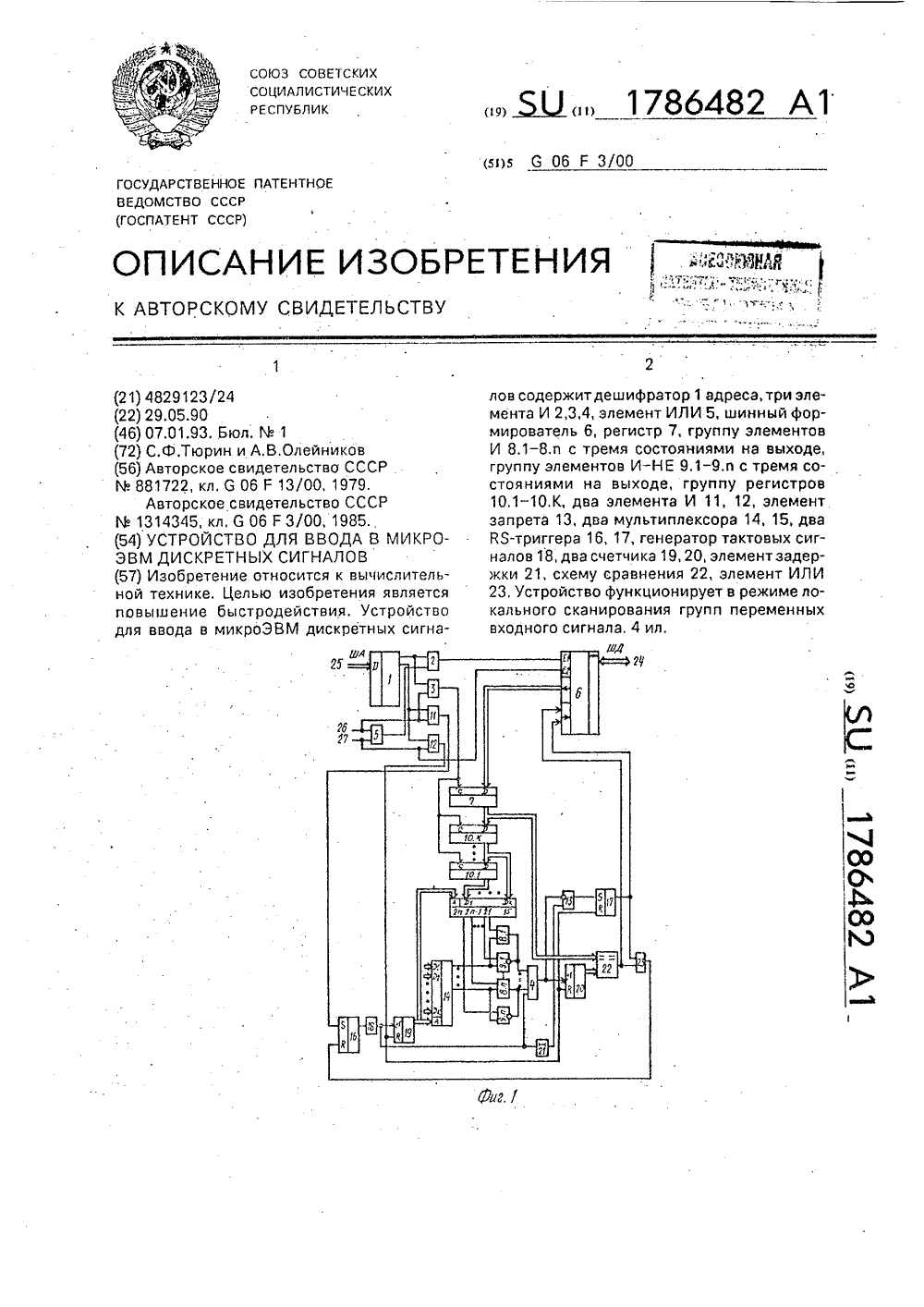
Номер патента: 1786482
Опубликовано: 07.01.1993
МПК: G06F 3/00
Метки: ввода, дискретных, микроэвм, сигналов
...этого по переднему фронту первого импульса с выхода элемента И 3 переписывается в регистр 10.К группы, предыдущее содержимое регистра 10.К группы при этом переписываетсянего из которых соединен с выходом первого ВЯ-триггера, вход установки в единицу которого соединен с выходом четвертого элемента И, первый и второй входы которого соединены соответственно со вторым вы- ходом дешифратора адреса и вторым входом первого элемента ИЛИ, первый вход которого соединен с первым входом пятогб элемента И, выход которого соединен со входами обнуления первого и второго счетчиков и входом установки в ноль второго ВЯ-триггера, вход установки в единицу которого соединен с выходом элемента запрета, управляющий вход которого соединен с выходом третьего...
Датчик импульсов к счетчику автоматической топливораздаточной колонки

Номер патента: 281049
Опубликовано: 01.01.1970
МПК: G07F 13/02, G07F 15/04
Метки: автоматической, датчик, импульсов, колонки, счетчику, топливораздаточной
...работает следующим образом. Приводной вал 4 при помощи шестеренной передачи 17 и 18 получает вращение от вала 19, связанного со счетчиком жидкости колонки, и при помощи блоков шестерен 5 и б, соответствующих данной цене топлива, передает вращение посредством накидных шестерен 11, скользящих шестерен 9 и 10 и шпонок 12 солнечным колесом 7. Сателлит 8 осью, являющейся одновременно водилом выходногоф23авала 15, суммирует их вращение и передаетэту сумму на выходной вал, который кулачком2 воздействует на контакт 8. Механизм пересчета преобразует обороты вала счетчикажидкости, пропорциональные количеству проходящего через колонку топлива, в обороты,пропорциональные стоимости этого топливапри данной его цене,Отношение диаметров шестерен в...
Предыдущий патент: Датчик весового дозирования
Следующий патент: Виброметр
Случайный патент: Центробежная муфта