Зевообразовательный механизм к мшгозевному ткацкому станку
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 483467
Авторы: Дитер, Карл-Хайнц, Райнер, Рюдигер
Текст
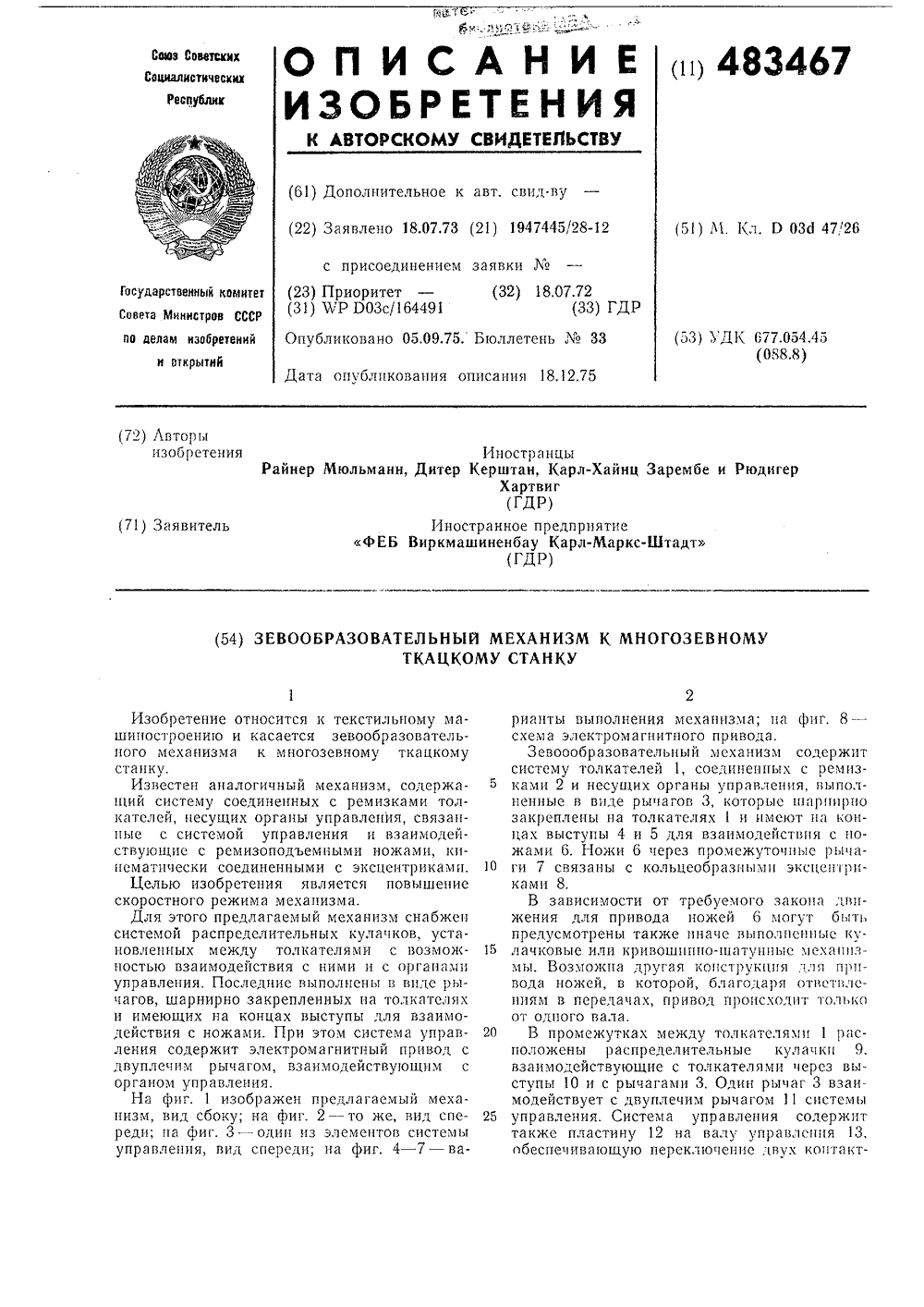
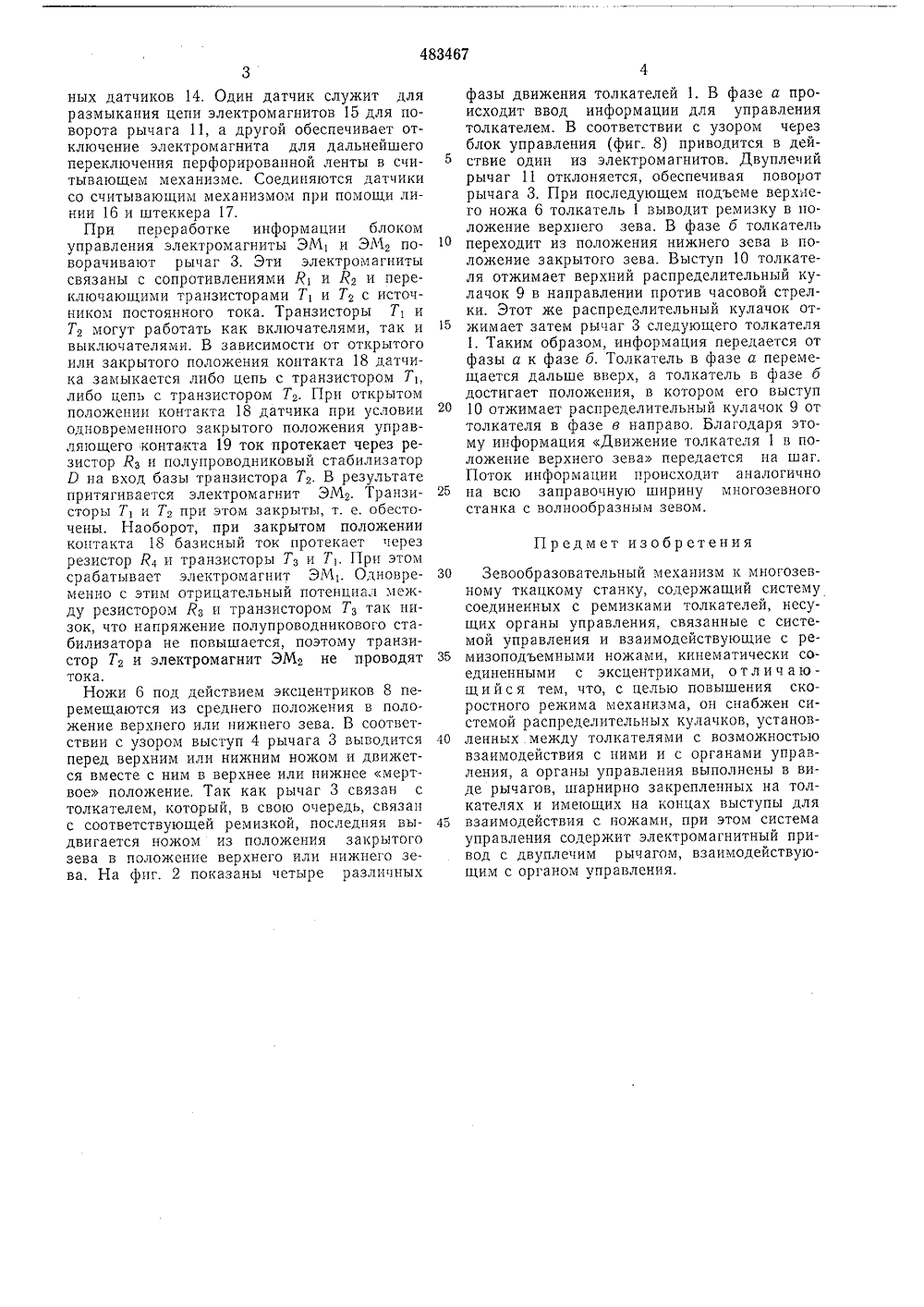
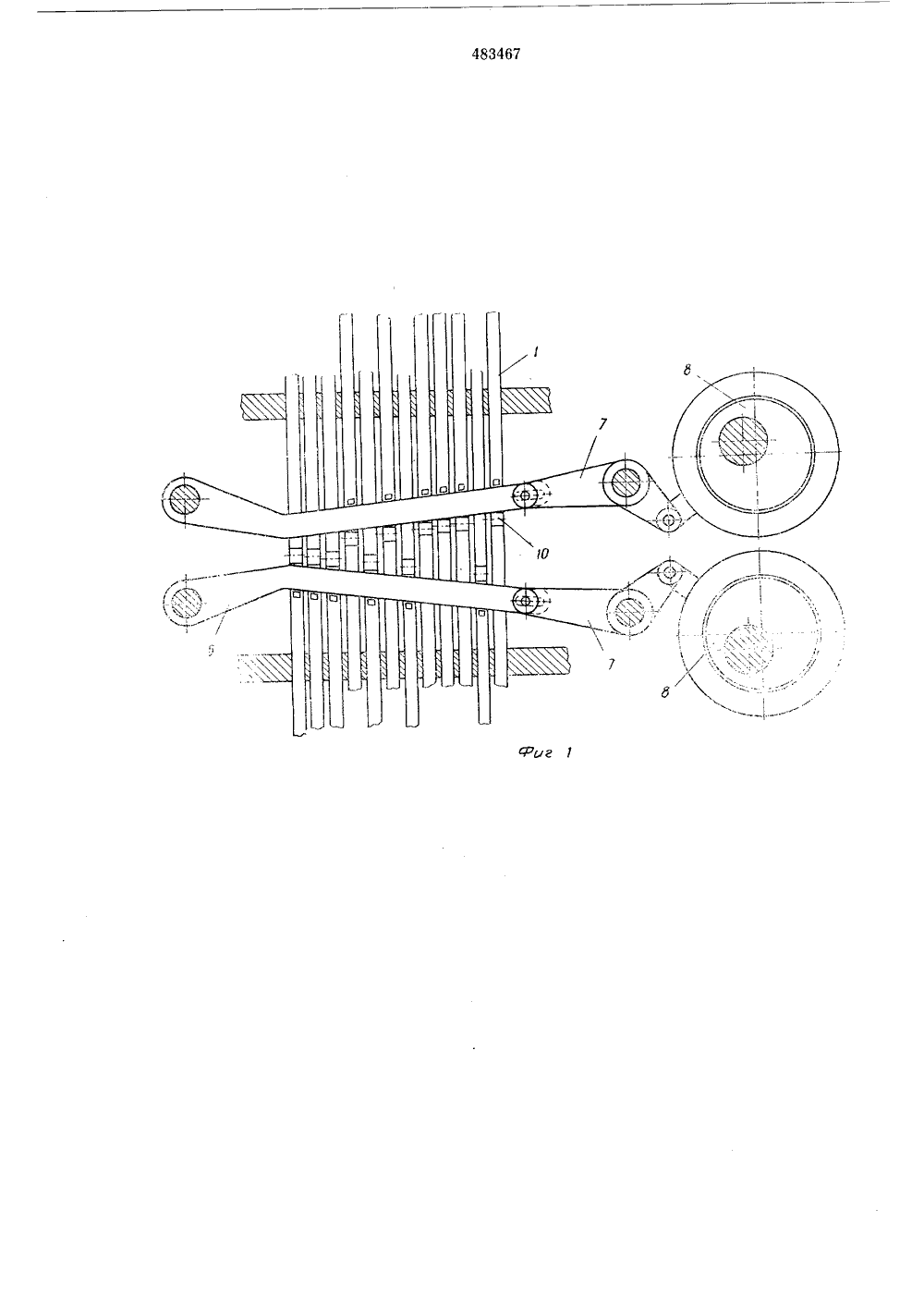
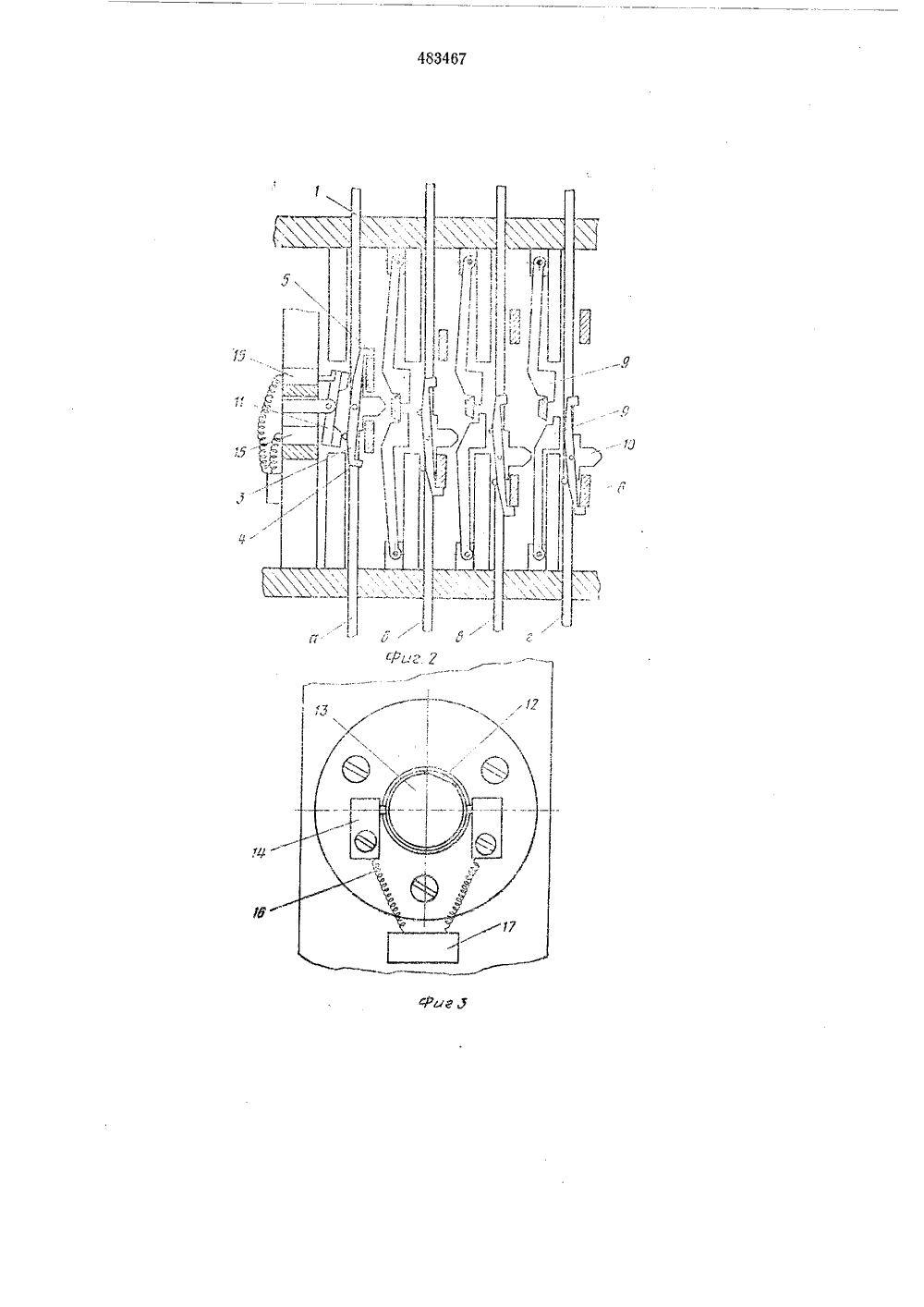
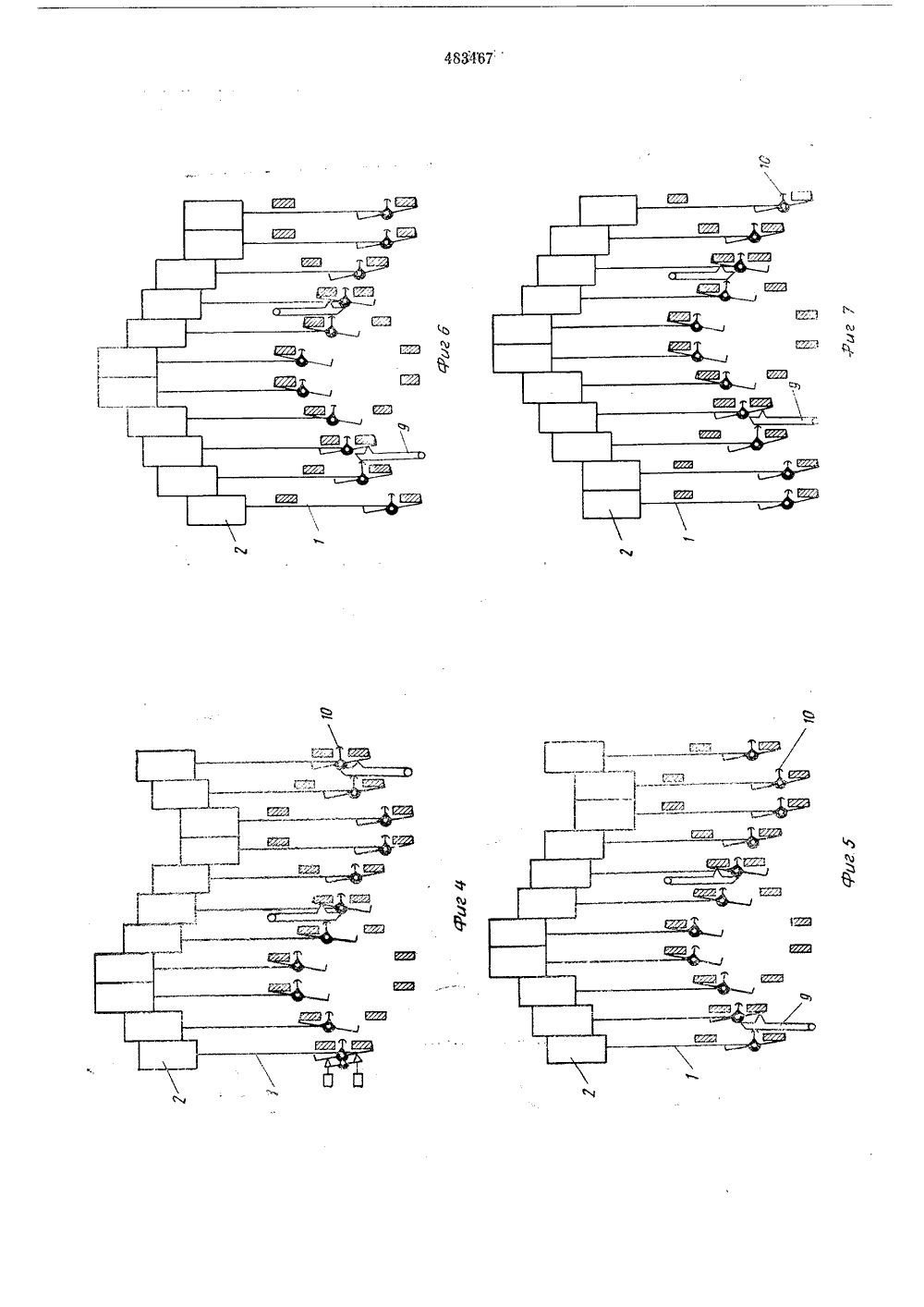
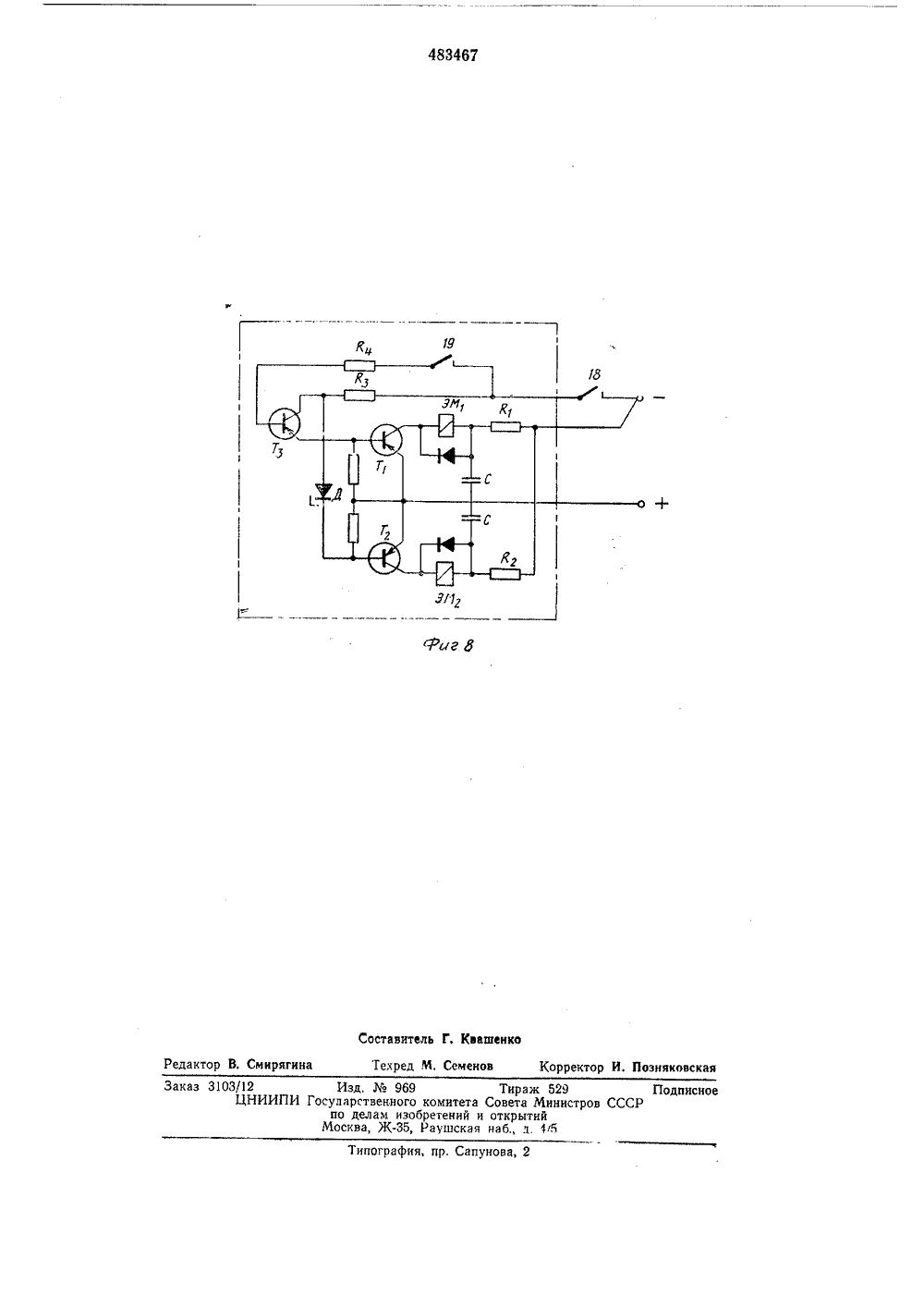
(31) ЮР 003 с/164491 Государственнык комитет Совета Министров СССР по делам изобретенийи открытий 53) УДК 677Опубликовано 05,09.75, Бюллетеньа опубликования описания 18.12,75 72) Авторы изобретения Иностранцы ер Керштаи, Карл-Хайн Хартвиг Иностранное предприятие Б Виркмашиненбау Карл-Марк) ЗЕВООБРАЗОВАТЕЛЬНЫЙ МЕХАНИЗМ К МНОГОЗЕВНОМУ ТКАЦКОМУ СТАНКУ Изобретение относится к текстильному машиностроению и касается зевообразовательного механизма к многозевному ткацкому станку.Известен аналогичный механизм, содержащий систему соединенных с ремизками толкателей, несущих органы управления, связанные с системой управления и взаимодействующие с ремизоподъемными ножами, кинематически соединенными с эксцентриками,Целью изобретения является повышение скоростного режима механизма.Для этого предлагаемый механизм снабжен системой распределительных кулачков, установленных между толкателями с возможностью взаимодействия с ними и с оргапамн управления. Последние выполнены в виде рычагов, шарнирно закрепленных на толкателях и имеющих на концах выступы для взаимодействия с ножами. При этом система управления содержит электромагнитный привод с двуплечим рычагом, взаимодействующим с органом управления.На фиг. 1 изображен предлагаемый механизм, вид сбоку; на фиг. 2 - то же, вид спереди; па фиг, 3 - один из элементов системы управления, вид спереди; на фиг. 4 - 7 - варианты выполнения механизма; на фпг. 8 - схема электромагнитного привода.Зевоообразовательный механизм содержитсистему толкателей 1, соединенных с ремиз ками 2 и несущих органы управления, выполненные в виде рычагов 3, которые шарнирно закреплены на толкателяхи имеют на концах выступы 4 и 5 для взаимодействия с ножами 6. Ножи 6 через промежуточныс рыча ги 7 связаны с кольцеобразными эксцентриками 8.В зависимости от требуемого закона движения для привода ножей 6 могут быть предусмотрены также иначе выполненные ку лачковые или кривошипно-шатунные механизмы, Возможна другая конструкция для привода ножей, в которой, благодаря ответвлениям в передачах, привод происходит только от одного вала.20 В промежутках между толкателямн 1 расположены распределительные кулачки 9, взаимодействующие с толкателями через выступы 10 и с рычагами 3. Один рычаг 3 взаимодействует с двуплечим рычагом1 системы 25 управления. Система управления содержиттакже пластину 12 на валу управления 3, обеспечивающую переключение двух контакт5 1 О 15 20 25 зо 35 4 О 45 ных датчиков 14. Один датчик служит для размыкания цепи электромагнитов 15 для поворота рычага 11, а другой обеспечивает отключение электромагнита для дальнейшего переключения перфорированной ленты в считывающем механизме, Соединяются датчики со считывающим механизмом при помощи линии 16 и штеккера 17.При переработке информации блоком управления электромагниты ЭМи ЭМ, поворачивают рычаг 3. Эти электромагниты связаны с сопротивлениями Я, и Р, и переключаюцими транзисторами Т 1 и Тг с источником постоянного тока. Транзисторы Т, и Т могут работать как включателями, так и выключателями. В зависимости от открытого или закрытого положения контакта 18 датчика замыкается либо цепь с транзистором Т либо цепь с транзистором Т. При открытом положении контакта 18 датчика при условии одновременного закрытого положения управляющего контакта 19 ток протекает через резистор Я и полупроводниковый стабилизатор й на вход базы транзистора Т, В результате притягивается электромагнит ЭМ. Транзисторы Т, и Т при этом закрыты, т. е. обесточены. Наоборот, при закрытом положении контакта 18 базисный ток протекает через резистор Р и транзисторы Т, и Ть При этом срабатывает электромагнит ЭМ,. Одновременно с этим отрицательный потенциал между резистором Я, и транзистором Т, так низок, что напряжение полупроводникового стабилизатора не повышается, поэтому транзистор Т, и электромагнит ЭМ не проводят тока.Ножи 6 под действием эксцентриков 8 перемещаются из среднего положения в положение верхнего или нижнего зева. В соответствии с узором выступ 4 рычага 3 выводится перед верхним или нижним ножом и движется вместе с ним в верхнее или нижнее мертвое положение. Так как рычаг 3 связан с толкателем, который, в свою очередь, связан с соответствующей ремизкой, последняя выдвигается ножом из положения закрытого зева в положение верхнего или нижнего зева, На фиг. 2 показаны четыре различных фазы движения толкателей 1. В фазе а происходит ввод информации для управления толкателем. В соответствии с узором через блок управления (фиг 8) приводится в действие один из электромагнитов. Двуплечий рычаг 11 отклоняется, обеспечивая поворот рычага 3. При последующем подъеме верхнего ножа 6 толкатель 1 выводит ремизку в положение верхнего зева. В фазе б толкатель переходит из положения нижнего зева в положение закрытого зева. Выступ 10 толкателя отжимает верхний распределительный кулачок 9 в направлении против часовой стрелки. Этот же распределительный кулачок отжимает затем рычаг 3 следующего толкателя 1. Таким образом, информация передается от фазы а к фазе б. Толкатель в фазе а перемещается дальше вверх, а толкатель в фазе б достигает положения, в котором его выступ 10 отжимает распределительный кулачок 9 от толкателя в фазе в направо. Благодаря этому информация Движение толкателя 1 в положение верхнего зева передается на шаг, Поток информации происходит аналогично на всю заправочную ширину многозевного станка с волнообразным зевом. Предмет изобретения Зевообразовательный механизм к многозевному ткацкому станку, содержащий систему соединенных с ремизками толкателей, несущих органы управления, связанные с системой управления и взаимодействующие с ремизоподъемными ножами, кинематически соединенными с эксцентриками, о т л и ч а ю - щ и й с я тем, что, с целью повышения скоростного режима механизма, он снабжен системой распределительных кулачков, установленных между толкателями с возможностью взаимодействия с ними и с органами управления, а органы управления выполнены в виде рычагов, шарнирно закрепленных на толкателях и имеющих на концах выступы для взаимодействия с ножами, при этом система управления содержит электромагнитный привод с двуплечим рычагом, взаимодействующим с органом управления,483467 Составитель Г, Квашенко Техред М. Семенов Редактор В. Смирягина Корректор И, Позняковская Типография, пр. Сапунова, 2 Заказ 3103/12 Изд,969 Тираж 529 Подписное ЦНИИПИ Государственного комитета Совета Министров СССР по делам изобретений и открытий Москва, Ж, Раушская наб., д, 4 В
СмотретьЗаявка
1947445, 18.07.1973
ФЕБ ВИРКМАШНЕБАУ КАРЛ-МАРКСШТАДТ
РАЙНЕР МЮЛЬМАНН, ДИТЕР КЕРШТАН, КАРЛ-ХАЙНЦ ЗАРЕМБЕ, РЮДИГЕР ХАРТВИГ
МПК / Метки
МПК: D03D 47/26
Метки: зевообразовательный, механизм, мшгозевному, станку, ткацкому
Опубликовано: 05.09.1975
Код ссылки
<a href="https://patents.su/6-483467-zevoobrazovatelnyjj-mekhanizm-k-mshgozevnomu-tkackomu-stanku.html" target="_blank" rel="follow" title="База патентов СССР">Зевообразовательный механизм к мшгозевному ткацкому станку</a>
Тормоз для вагона однорельсовой железной дороги на столбах

Номер патента: 22045
Опубликовано: 31.08.1931
Автор: Волковский
МПК: B61B 13/04, B61C 13/08, B61H 1/00
Метки: вагона, дороги, железной, однорельсовой, столбах, тормоз
...положение стержня б, регулируемое тягой 11, удерживает колодки от соприкосновения с колесами. тормоза для вагон Тормоз для вагона одно рельсовой железной дороги на столбах состоит из двух колодок, подвешенных у колес двух осей тележки с внутренней стороны междуосного пространства к нижним концам двуплечих рычагов, верхние концы которых соединяются с концами горизонтальных ветвей Т-образного поворотного стержня, Средняя вертикальная ветвь зтого стержня соединяется гибкой тягой и с оттягивающей его в противоположную тяге сторону пружиной. Натяжение тяги вручную или притяжение пружины поворачивает Т-образный стержень и вызывает нажим колодок на колеса,На чертеже фиг. 1 изображает вид бокового тормоза; фиг. 2 - вид его спереди; фиг. 3 -...
Устройство для осевой регулировки положения и фиксации верхнего валка в клети обжимного стана

Номер патента: 1733138
Опубликовано: 15.05.1992
Автор: Сафронов
МПК: B21B 31/18
Метки: валка, верхнего, клети, обжимного, осевой, положения, регулировки, стана, фиксации
...нажимного устройства клети путем уменьшения износа стержней и подушек - достигается тем, что в устройстве для осевой регулировки положения и фиксации верхнего валка в клети обжимного стана, содержащем прижимные планки, смонтированные на станине клети, направляющие стержни с лысками, установленные в цилиндрических вертикальных пазах подушек валков симметрично осям валка и клети, и средства крепления прижимных планок, пазы и стержни подушек выполнены длиной, соизмеримой с высотой подушек, и снабжены планками износа, установленными на лысках стержней с зазором по отношению к поверхности подушек, обращенной к пружинным планкам,На фиг.1 показано закрепление стержней и планок износа на верхней подушке, общий вид; на фиг.2 - сечение А - А на...
Устройство для определения положения границы фаз при выращивании кристаллов вертикальной направленной кристаллизацией расплава

Номер патента: 485761
Опубликовано: 30.09.1975
Автор: Карпов
МПК: B01J 17/06
Метки: вертикальной, выращивании, границы, кристаллизацией, кристаллов, направленной, положения, расплава, фаз
...вера кристаллизации и тепрого соответствуют темации и теплопроводности щества.(22) Заявлено 04.01.74 (21) 1982949/23-26 ата опубликования описания 24.12.75 Изобретение относится к области выращивания кристаллов и может быть использовано при исследовании процесса направленной кристаллизации для подбора оптитальных параметров режима,В известном устройстве, позволяющем определить положение границы фаз при помощи подвижно установленного по длине ампулы щупа, герметизация внутреннего объема ампулы при необходимости создания высоких давлений и температур затруднительна.,Целью изобретения является обеспечение ВОЗможности определения положения границы фаз в герметичной ампуле с контролируемой газовой средой.Предложенное устройство отличается...
Подъемный механизм двухподъемной жаккардовой машины с открытым зевом

Номер патента: 643089
Опубликовано: 15.01.1979
Авторы: Антониус, Вольфганг, Гюнтер
МПК: D03C 3/08
Метки: двухподъемной, жаккардовой, зевом, механизм, открытым, подъемный
...перекрывает отверстие 31, то плоская пружина 30 изгибается и через смещающуюся втулку 29 переводит крючок 16 в крайнее правое положение, а если отверстие 31 свободно, то пружина 30 концом входит в него дальше, и крючок 16 остается в крайнем левом положении, Перемещение крючка 16 из крайнего правого положения осуществляется пружиной 36 и ножом 15, взаимодействующим с захватывающим элементом 18 крючка 16, а при последующем выпрямлении пружины 30 крючок переводится внизу в крайнее левое положение, при этом захватывающий элемент 21 крючка 16 входит в зацепление с выступом 24 опоры 22, Захватывающий элемент 17 выполнен длиннее элемента 18 для того, чтобы крючок 16, находящийся вверху в крайнем левом положении, при прогнутой пружине 30 мог...
Устройство для выделения импульсов углового положения вала и верхней мертвой точки двигателя внутреннего сгорания
Номер патента: 984255
Опубликовано: 20.03.2000
МПК: F02P 5/145
Метки: вала, верхней, внутреннего, выделения, двигателя, импульсов, мертвой, положения, сгорания, точки, углового
1. Устройство для выделения импульсов углового положения вала и верхней мертвой точки двигателя внутреннего сгорания, содержащее задатчик импульсов, приемную головку сигналов углового положения вала и верхней мертвой точки, делители напряжения и формирователи сигналов, отличающееся тем, что, с целью повышения надежности, устройство снабжено пиковым детектором, а формирователи сигналов выполнены в виде первого и второго компараторов, причем вход детектора подключен к первому входу компаратора и через делитель напряжения - к второму входу второго компаратора и соединен с выходом приемной головки, а выход детектора соединен с первым входом второго компаратора и через делитель напряжения - с...
Предыдущий патент: Устройство для очистки от пуха текстильных машин
Следующий патент: Механизм контроля уточных нитей на бесчелночном ткацком станке
Случайный патент: Резервированное запоминающее устройство