Система управления выносными опорамифу. д i. -i. -—-•
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 422681
Авторы: Вуст, Изобретени, Лов, Пахомов, Писарев, Улитенко, Федоров, Филоненко, Щедровицкий

Текст
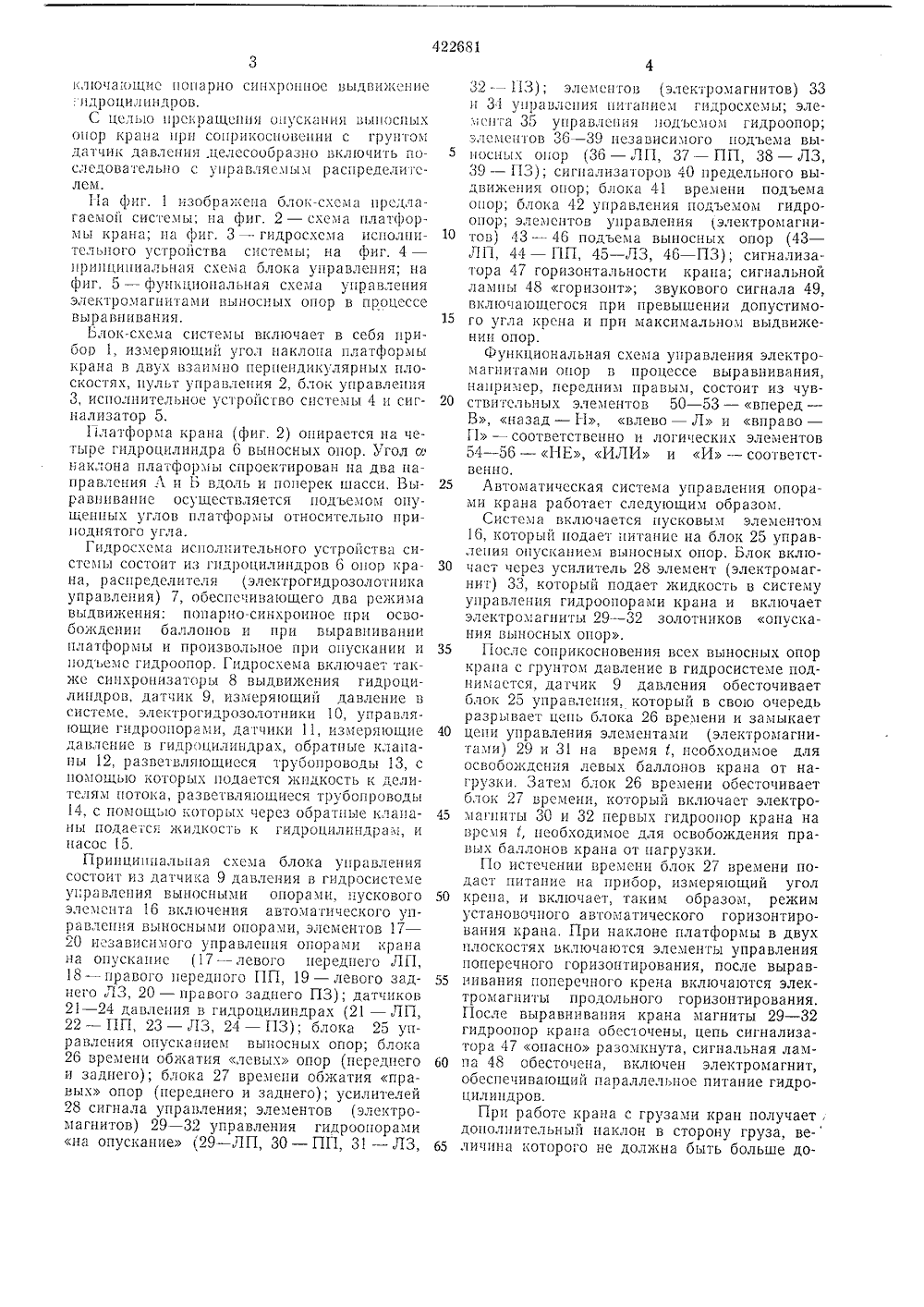
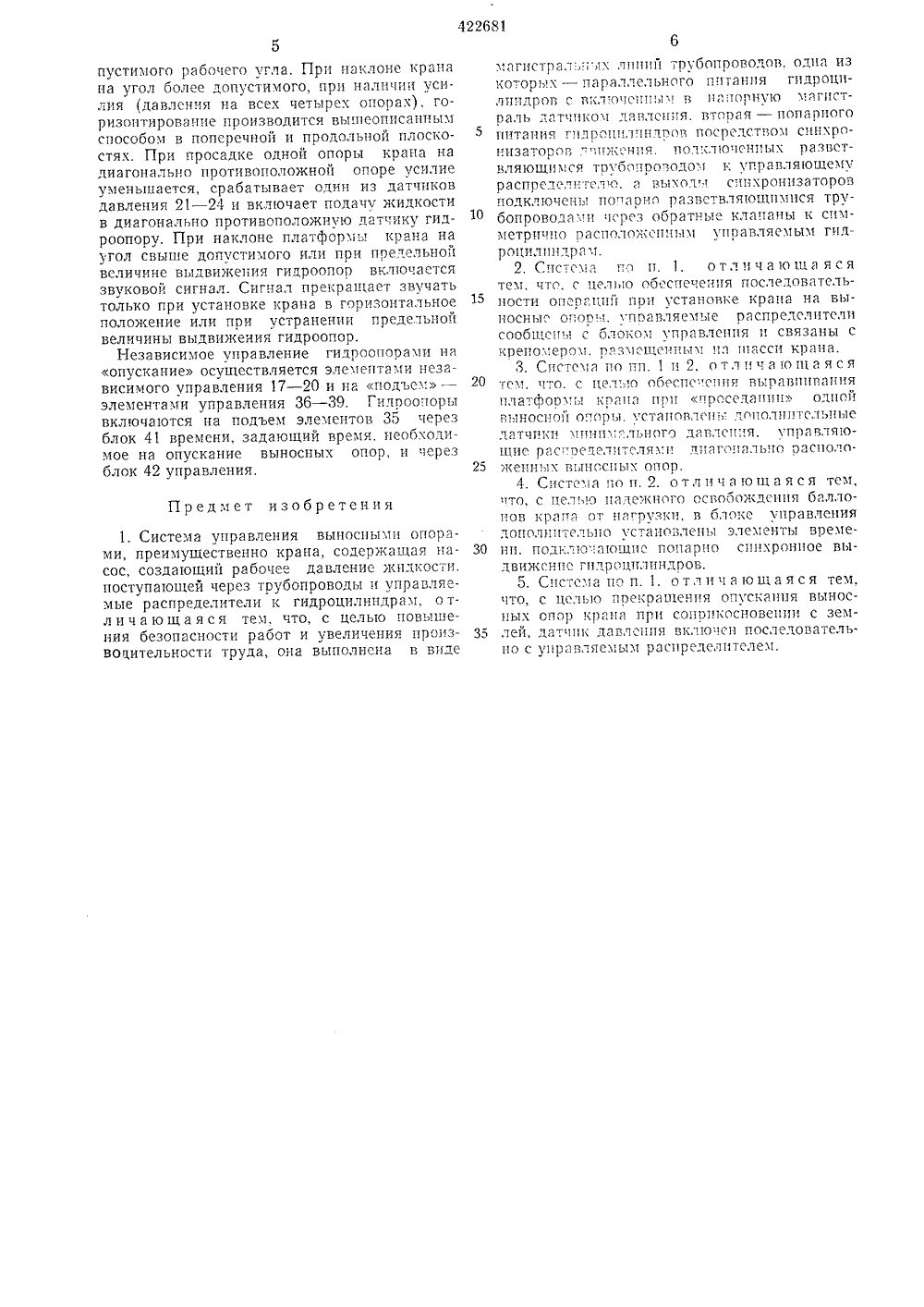
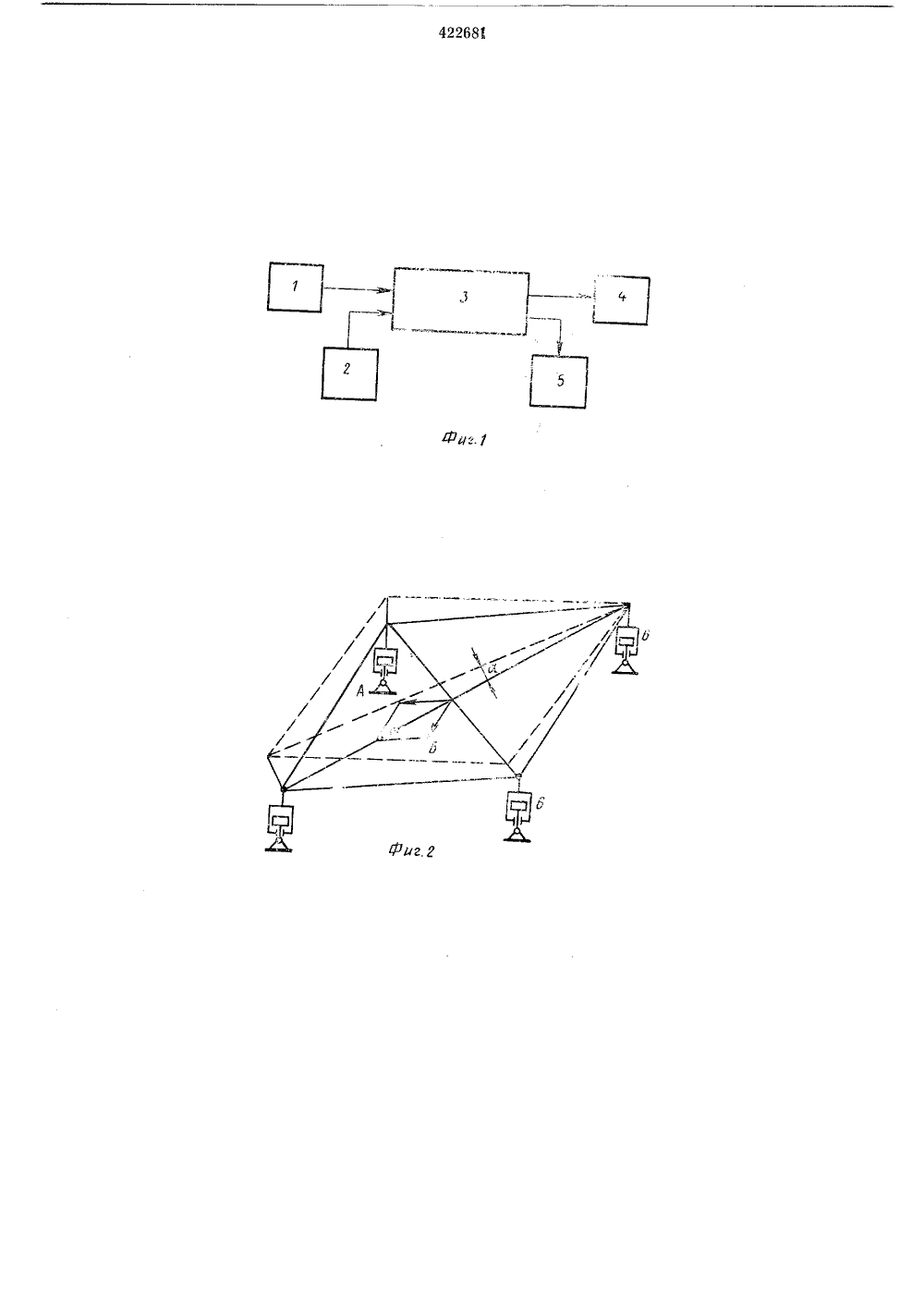
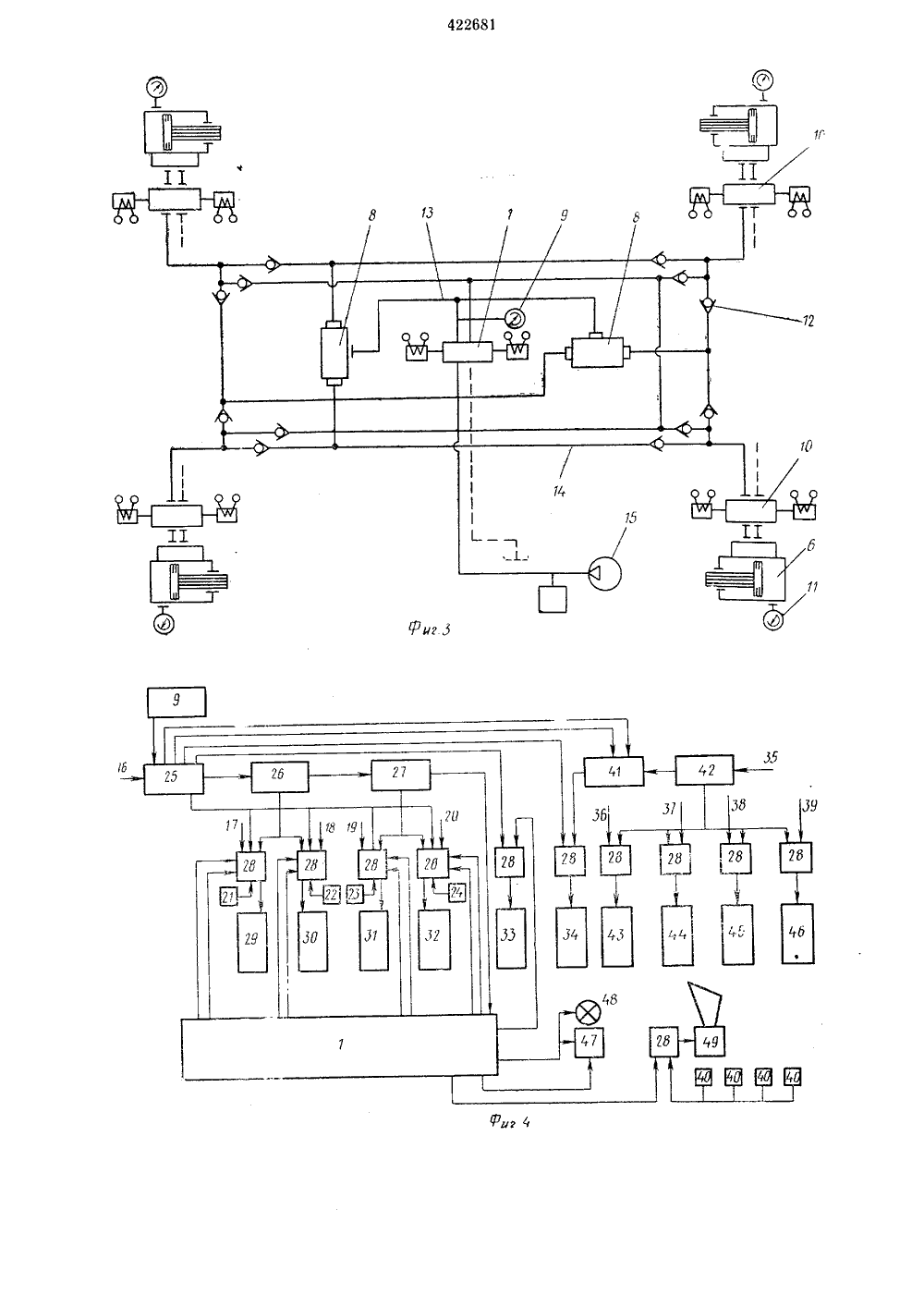
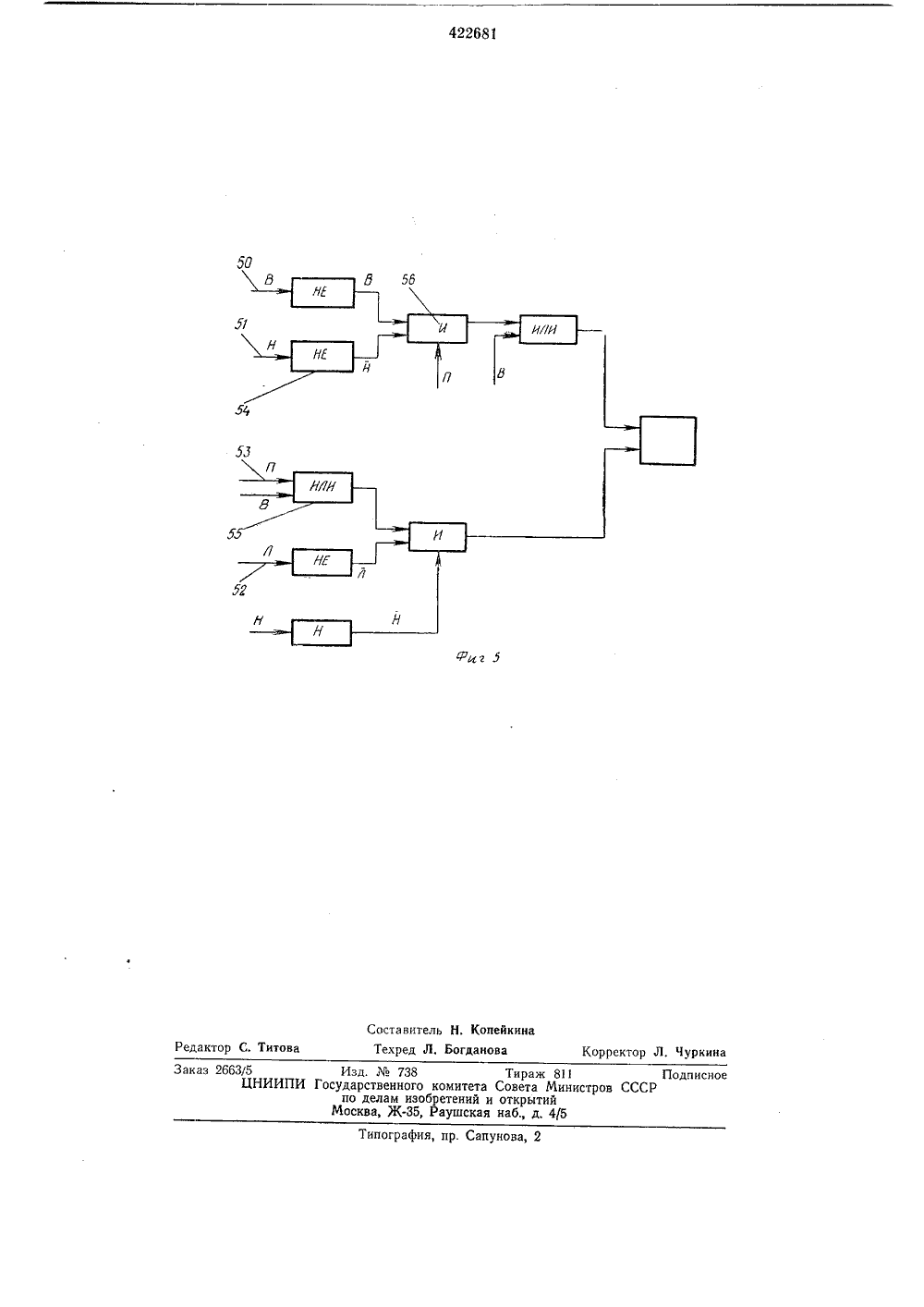
р 1 422681 ОПИСАНИЕ ИЗОБРЕТЕНИЯСоюз СоветскихСоциалистическихРеспублик К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ(51) М, Кл. В 66 с 2 Приоритет осударственнын комнтетСовета Мнннстров СССРпо делам нзобретвннйн открытнй 3) УДК 621,874(088,8) Опубликовано 05,04.4, БюллетеньДата опубликования описания 27.09. 1 Цедровицкий, А. АВустян, В. А, Прок едоров и А. В. ф следовательский ожного машиност. Пахомов,Ловягин офьев, И лоненко нститут оения С, С.Б. В,Г.Д. ф ый научно-и и дорВсес роительного аявитель 54) СИСТЕМА УПРАВЛЕНИЯ ВЫНОСНЫМ ия платформы выносной опоополнительцые я, управляюльно располоения баллонов равленпя целевремсни, под 72) Авторы изобретения Н. Н. Копейкина А. Г. ПисареИзобретение относится к системам управления выносными опорами самоходных машин, например стреловых кранов.Известна система управления выносными опорами, преимущественно крана, содержащая насос, создающий рабочее давление жидкости, поступающей через трубопроводы и управляемые распределители к гидвоцилицдрам.При такой системе управления выносными опорами платформа крана выравнивается машинистом с помощью распределителей вручную, При этом горизонтальность платформы определяется приспособлением, состоящим из отвеса и шкалы, отградуированной в угловых единицах, или с помощью пузырькового уровня, или на глаз, Все это не позволяет с необходимой точностью определять угол наклона платформы, производить правильную на;альную установку и поддерживать ее при рабочих операциях. В результате краны часто работают с углами наклона платформы более допустимых, следствием этого являются аварии кранов при подъемах предельных грузов. Особенно ответственной и трудоемкой является установка дополнительных опор тяжелых самоходных крапов с длинными стрелами и кранов с башецно-стреловым рабочим оборудованием при допустимом угле наклона платформы не более 1 - 1,5. Для повышения оезопасцости работ и увеличения производительности труда система выполнена в виде магистральных линий трубопроводов, одна из которы - параллельного 5 питания гидроцилипдров с включенным в напорную магистраль датчиком давления, вторая - попарного питания гидроцилицдра посредством синхронизаторов движения, подключенных развстыляющимся трубопроводом 10 к управляющему распределителю, а выходысинхронизаторов подключены попарно разветвляющимися трубопроводами через обратные клапаны к симметрично расположенным управляемым гидроццлпцдрам.15 С целью обеспечения последовательностиопсраций при установке крана на вьшосныс опоры управлясмыс распределители могут оыть сообщены с блоком управления и связаны с крецомсром, размещенным на шасси 20 крана,Для обеспсчсцця выравциван крана при проседании одной ры могут быть установлены д 25 датчики минимального давлени щие распределителями диагона женных выносных опор. С целью надежного освобожд крана от нагрузки в блоке уп 30 сообразно установить элементыклоча 1 ощис попарно сшхроппос ьыдвиэксние :цдроцилипдров.С целью црскращеш 1 я опускания выносных Оп 01 э 1 э а и а н 1 э и сон 1 э икосп Овенг и с г 1 эуп том Дачик давления .целссоооразно вкл 10 чить последовательно с управляемым распределителем.11 а фи. 1 нзо 01 эажепа Олок-схемагаемой системы; па фиг. 2 - схема платформы крана; па фиг. 3 - гидросхсма исполнительного устройства системы; на фиг. 4 - ц 1 эипципиальная схема Олока уп 1 эавлепия; на фиг, 5 - функциональная схема управ:ения электромагнитами выносных опор в процессе выравнивания.Блок-схема системы включает в себя прибо 5 э 1, измеряющий угол наклона платформы крана в двух взаимно перпендикулярных плоскостях, пульт управления 2, блок управления 3, исполнительное устройство системы 4 и сигнализатор 5.Платформа крана (фиг. 2) опирается на четыре гидроцилиндра 6 выносных опор, Угол ы наклона платформы спроектирован на два направления Л и Б вдоль и поперек шасси, Выравнивание осуществляется подъемом опуШенных углов платформы относительно приподнятого угла,Гидросхема исполнительного устройства системы состоит из гпдроцилиндров 6 опор крана, распределителя (электрогидрозолотника управления) 7, обеспечивающего два реэкима выдвижения: попарно-синхронное при освобождении баллонов и при выравнивании платформы и произвольное при опускании и подьсмс гидроопор. Гидросхе 1 а включает такэке сипхроизаторы 8 выдвижения гидроцилиндров, датчик 9, измеряощий давление в системе, электрогидрозолотники 10, управляющие 1 ч 1 дроопОрам, датчики 11, измеряющие давление в гидроцилиндрах, обратные клапаны 12, разветвл 5 пощисся трубопроводы 13, с помощью которых подается жидкость к делитслям потока, разветвляющиеся трубопроводы 14, с помощью которых через обратные клапаны подается жидкость к гид 1 эоцнлиндраэ 1, и насос 15.Припципцальная схема блока управления состоит из датчика 9 давления в гидросистеме управления выносными опорами, пускового элемента 16 включения автоматического управления выносными опорами, элементов 1 в 20 независимого управления опорами крана на опускание (17 - левого переднего ЛП, 18 - правого передпого ПП, 19 - левого заднего ЛЗ, 20 - правого заднего ПЗ); датчиков 21 - 24 давления в гидроцилиндрах (21 - ЛП, 22 - ПП, 23 - ЛЗ, 24 - ПЗ); блока 25 управления опусканием вьпосных опор; блока 26 времени обжатия левых опор (переднего и заднего); блока 27 времени обжатия правых опор (переднего и заднего); усилителей 28 сигнала управления; элементов (электромагнитов) 29 - 32 управления гидроопорами на опускание 29 - ЛП, 30 - ПП, 31 - ЛЗ,5 10 15 20 25 ЗО 35 40 45 50 г 60 65 32113); элементов (электроэагнитов) 33 ц 34 управления пиганием гидросхсмы; элемента 35 управления цодьсмом гидроопор; элементов 36 - 39 независимого подъема выносных опор (36 - ЛП, 37 - ПП, 38 - ЛЗ, 39 - ПЗ); сипализаторов 40 предельного выдвижения опор; блока 41 времени подъема опор; блока 42 управления подъемом гидро- опор; элементов управления электромагнитов) 43 - 46 подъема выносных опор (43 - ЛП, 44 - ПП, 45 - ЛЗ, 46 - ПЗ); сигнализатора 47 горизонтальности крана; сигнальной лампы 48 горизонт; звукового сигнала 49, включаошсгося при превышении допустимого угла крена и при максимальном выдвиэкении опор.Функциональная схема управления электромагнитами опор в процессе выравнивания, например, передним правым, состоит из чувствительных элементов 50 - 53 - вперед - В, назад - Н, влево - Л и вправо - П - соответственно и логических элементов 54 - 56 - НЕ, ИЛИ и И - соответственно.Лвто 1 атическая система управления опорами крана работает следующим образом.Система включается пусковыэ элементом 16, который подает питание на блок 25 управления опусканием выносных опор. Блок включает через усилитель 28 элемент (электроагнит) 33, который подает жидкость в систему управления гидроопорами крана и включает электромагниты 29 - 32 золотников опускани 51 Выносных ОН 01 э.После соприкосновения всех выносных опор крана с грунтом давление в гидросистеме поднимается, да гчик 9 давления обесточивает блок 25 управления, который в свою очередь разрывает цепь блока 26 времени и замыкает цепи управления элементами (электромагнитами) 29 и 31 на время 1, необходимое для освобождения левых баллонов крана от нагрузки. Затем блок 26 времени обесточивает блок 27 времени, который включает электромагниты 30 и 32 первых гидроопор крана на время 1, необходимое для освобождения правых баллонов крана от нагрузки.По истечении времени блок 2 времени подаст питание на прибор, измеряющий угол крена, и включает, таким образом, режим установочного автоматического горизонтирования крапа. При наклоне платформы в двух плоскостях включаются элементы управления поперечного горизонтирования, после выравнивания поперечного крена включаются электромагниты продольного горизонтирования. После выравнивания крана магниты 29 - 32 гидроопор крапа обесочены, цепь сигнализатора 47 опасно разомкнута, сигнальная лампа 48 обесточена, включен электромагнит, обеспечивающий параллельное питание гидро- цилиндров.При работе крапа с грузами кран получает, дополнительный наклон в сторону груза, величина которого не должна быть больше допустимого рабочего угла. При наклоне крана на угол оолее допустимого, при цалцчии усилия (давления ца всех четырех опорах 1 горизонтирование производится вьцпеописацпым способом в поперечной и продольцой плоскостях. При просадке одной опоры крана на диагонально противоположноц опоре усилие уменьц 1 ается, срабатывает один из датчиков давления 21 - 24 и включает подачу жидкости в диагональцо противоположную датчику гидроопору. При наклоне платформы крана на угол свыше допустимого или при преельной величине выдвижения гидроопор вклОчается звуковой сигнал. Сигнал прекращает звучать только при установке крана в горизонтальное положение или при устранении предельной величины выдвижения гидроопор.Независимое управление гидроопорами на опускание осуществляется элементами независимого управления 17 - 20 и на подъеэ; - элементами управления Зб - 39. Гилроопорь включаются на подъем элементов 35 через блок 41 времени, задаюший время, цеобхолимое на опускание выносных опор, и через блок 42 управления. Предмет изобретения 1. Система управления выносцымц опорами, преимущественно крана, содержащая насос, создающиц рабаее давление жидкости, поступающей через трубопроводы ц управляемые распределители к гидроцилиндрам, о тл и ч а ю ш а я с я тем, что, с целью повьпцения безопасности работ и увеличения производительности труда, оца выполнена в виде 5 10 15 20 25 30 35 магистралььх линий трубопроволов, олца из которых - параллельного пцтаия гцлроццлц 1 дров с вклкц 1 сц 1,1 м в ца 11 орцук) маги, - раль датчиком лаглсцця, вторая - попарцого питания гцчэйццл 1 н 1 пов пос 1 эслстГом сицхрйнизаторов л;цжснця. полкл 1 О 1 снцых развствля 1 ошцмся трубопроводо.к управляющему распрелелцтсл о. а выхоль с:,шхронцзаторов подключены по"арно разветвляющимися труоопроводац гсрсз обратныс клапаны к симметрично пасположспым управляемым гцдрОцилцнлра 1.2. Гцстсма го и. 1, отлича юнца яся тем. что, с целью обсспсчецця послеловатсльности операций прц установке крапа на выцосныс опорь.; Поавляеэь 1 е распрелслцтслц сообшсць с блоком управления и связаны с к)ецоеэо 1. раз 1 с 1 ценцьНа П 1 асси к 1 эана.3. Сцстсэ 1 а по пп. 1 и 2, отлцч а тоща яся тем. что. с пел. ю Обеспс:сцця выравццгация платформы крапа прц проседании одной выносцой опопы.стацовлсць лоцолццтсльцые латчцки иПп,.".льцого лаг;сщя.правля 1 о ЦИС Рае; 1 ЭСДЕЛТСЛЯ ;Ц т 1 паГад ЦО ОаСЦОЛО 1 КЕЦЦЫХ ВЫНОСНЫХ ОПОР.4. Систс:,1 я по и. 2, О т л и ч а 1 О ш а я с я тем, что, с цел.ю падежного осгобождспця баллоцов крапа от Нагрузки, в блоке управления лополнптельцо установлены элементы време 1 ш, полкло;аюшцс попарцо сшгхроццое вылвижсццс гцлроцплиплпов.5. Сцс гсэ а цо и. 1. о т л и ч а ю ш а я с я тем, что, с целью прекращения опскацця выносных ОПО 1 э кэаця при соп 1 эцкосновсции с зю- лей, дат шк давлспця включсн послеловательцо с управляемым распределителем.Составитель Н. КопейкинаРедактор С. Титова Техред Л, Богданова Корректор Л, Чуркина Заказ 2663/5ЦНИИПИ Го Типография, пр. Сапунова Изд.738 дарственного ком по делам изобрет Москва, Ж, Рау
СмотретьЗаявка
1658884, 13.05.1971
дорожного машиностроени
изобретениН. Н. Копейкина, С. Щедровицкий, А. А. Лов гин, И. П. Улитенко, А. Г. Писарев, Б. В. ВустВ. А. Прокофьев, И. Ф. Пахомов, Г. Д. Федоров, А. В. Филоненко
МПК / Метки
МПК: B66C 23/78
Опубликовано: 05.04.1974
Код ссылки
<a href="https://patents.su/6-422681-sistema-upravleniya-vynosnymi-oporamifu-d-i-i.html" target="_blank" rel="follow" title="База патентов СССР">Система управления выносными опорамифу. д i. -i. -—-•</a>
Система элементов модельных опор линий электропередачи

Номер патента: 1058331
Опубликовано: 15.12.1989
Авторы: Гутман, Крюков, Тиходеев
МПК: E04H 12/00
Метки: линий, модельных, опор, электропередачи, элементов
...конструкции "расщепления" Фазы) и некоторые другие исследования и испытания, Для получения большой точности данных опоры должны иметь геометрические размеры натураль, ной величины. Для исследования электрических характеристик опор их механическая прочность и строительные качества (удобства транспорта, долговечности), а такжеэксплуатационные качества не важны, так как опоры не предназначены для длительной эксплуатации на линиях 50 электропередач или для больших механических нагрузок.Поэтому опоры для электрических испытаний могут быть выполнены в виде упрощенных моделей, в натуральную ве личину моделирующих только,электрические габариты, но важную роль приобретают возможность быстрого изготовления 1-2 опор данного типа, быстрого...
Устройство для стопорения несущей платформы плавучей установки относительно ее опор

Номер патента: 901155
Опубликовано: 30.01.1982
Автор: Соловьев
МПК: B63B 35/44
Метки: несущей, опор, относительно, плавучей, платформы, стопорения, установки
...сопрягаемом с поверхностью опоры 2, с пазом б, сообщенным через отверстие, выполненное в колодке со сквозным отверстием а штока 4. На конце штока 4 имеется резьба и гайка 8 для регулировки усилия пружины 7. Узел 5 подключения рабочей среды (штуцер) смонтирован на конце штока 4, а втулки 6 10 расположены по периметру опоры, В варианте исполнения (фиг. 3) пружины 7 расположены в цилиндрических стаканах-кронштейнах, размещенных осеимметрично по углам треугольной опоры 2. Колодки 3 выполнены плоскими. Устройство работает следующим образом.Стопорение платформы 1 относительно опоры 2 осуществляется силами фрикцион ного сцепления путем прижатия колодок 3 к поверхности опор 2 за счет сил упругости пружины 7. Расстопорение платформы...
Сигнализатор предельного значения тепловой деформации блок картера и опор коренных подшипников коленчатого вала двигателя внутреннего сгорания

Номер патента: 1326937
Опубликовано: 30.07.1987
Автор: Титов
МПК: G01M 15/00
Метки: блок, вала, внутреннего, двигателя, деформации, значения, картера, коленчатого, коренных, опор, подшипников, предельного, сгорания, сигнализатор, тепловой
...8не имеет тепловой деформации (фиг 2) 5 ОИ его температура везде одинакова,поэтому коренные подшипники соосныс коленчатым валом, При этом индуктивный преобразователь 1, установленныйв верхней части подшипника, расположен дальше от шейки коленчатого вала 9,чем преобразователь 2, расположенныйв нижней части подшипника, поэтомуОБ и компаратор 3 напряжения на 37 2выходе имеет положительный сигнал.Так как температура верхней частиблок-картера (Т ) и нижней его части= Т= Т, то,цатчики 5 и 7 не имеютразйости в сигналах, поэтому компаратор 6 напряжения не выдает на элемент 4 сравнения напряжения управляю-щего сигнала и на выходе элементасравнения возникает отрицательное(минимальное по величине) напряжениеБ и индикатор 12 не светится, таккак...
Опора платформы самосвала

Номер патента: 1495163
Опубликовано: 23.07.1989
Авторы: Андреев, Мелик-Саркисьянц
МПК: B60P 1/28, F16F 15/08
Метки: опора, платформы, самосвала
...7 размещена в обойме 3 между упругими элементами 9 зафиксирована на держателе 4 съемным пальцем 10. Обойма 3 ограничивает перемещение упругих элементов 9 в горизонтальной плоскости. Скоба 7 своими горизонтальными полками 8 свободно оперта на упругие элементы 9. На обойме 3 выполнены продолговатые отверстия 11 под болты 6. Насамосвале установлены две опоры.Опора работает следующим образом.При движении самосвала передняя часть платформы передает вертикальные и горизонтальные нагрузки через верхнюю часть 1 и скобу 7 на упругие элементы 8, которые за счет упругой деформации поглощают энергию ударов и вибрации.При опускании платформы возможно смещение одной из частей опоры по отношению к другой. В этом случае за счет возможности...
Турбохолодильник, газодинамическая лепестковая опора турбохолодильника, способ изготовления лепестковых элементов опоры (его варианты) и устройство для изготовления этих элементов

Номер патента: 1089367
Опубликовано: 30.04.1984
Авторы: Баранов, Иванников, Листратов, Морозов
МПК: F25B 11/00
Метки: варианты, газодинамическая, его, лепестковая, лепестковых, опора, опоры, турбохолодильник, турбохолодильника, элементов, этих
...го участка лепесткового элемента; на фнг, 1 О - кривые зависимости радиуса валка от радиуса наименьшей кривизны лепесткового элемента и толщины ма,териала; на фиг, 11 - кривые зависимости радиуса кривизны лепестковогоэлемента от числа циклов нагружения и толщины материала.Турбохолодильник (фиг. 1 и 2, п.1 формулы изобретения) содержит ос" новной корпус 1, смонтированные в нем корпуса подшипников 2 газодинами, ческой лепестковой опоры с размещен.:ным внутри них валом 3 с рабочимиколесами 4 в рабочих полостях 5, со общенных с подводящими рабочее телополостями б, Лепестковые с криволинейным профилем элементы 7 закреплены корневой частью 8 в пазах 9 промежуточных втулок 10 цилиндрическими штифтами 11.Внутри основного корпуса 1...
Предыдущий патент: Устройство для монтажа колонны мобильнбашенного кранаamp; ft•• •. f t ••; =»пи
Следующий патент: Переносная электрическая таль
Случайный патент: Высокочастотный усилитель