Система управления соосным вертолетом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки





Текст
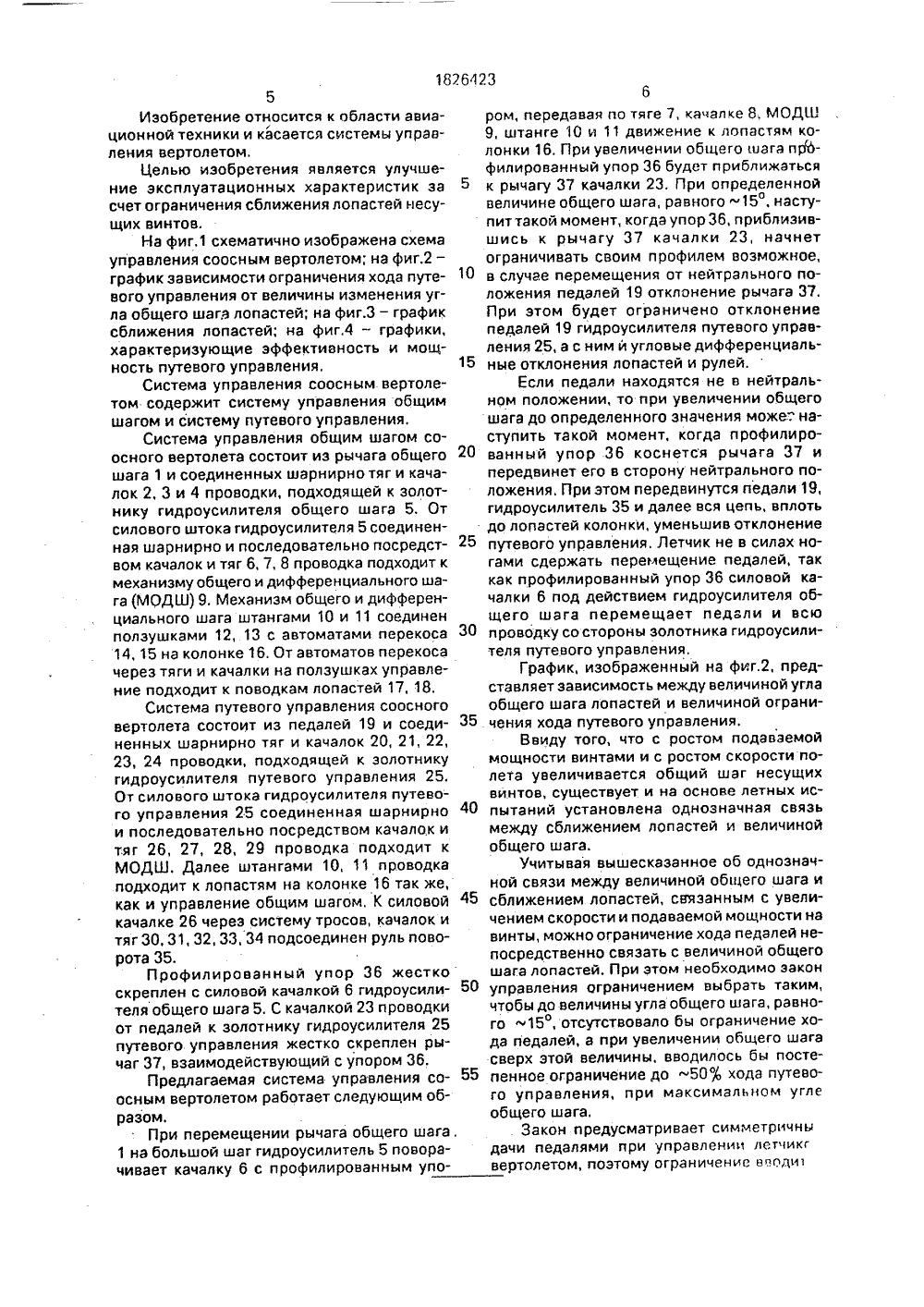
ТЕНИ 103 СОВЕТСКИХЦИАЛИСТИЧЕСКИХ РЕСПУБЛИКСУДАРСТВЕННОЕ ПАТЕНТНОЕЕДОМСТВО СССР (ГОСПАТЕНТ СССР) ОПИСАНИЕ К ЗВТОРСКОМ СВИДЕ(71) Ухтомский вертолетный завод им.Н.И,Камова (72) Купфер МА.; Петросян ЭА,; Лазаренко ЮА Козырев АИ.; Сухарев В.И.; Хегай Р.И.; Чупин В.П, (56) Авторское свидетельство СССР й 533008, кп. В 64 С 31/40, 1975.Суриков Н.ФИоффе Г.И. и др, Вертолет КА. М.: Транспорт, 1982; с 143 - 145, 10 - 110, 128-131.(54) СИСТЕМА УПРАВЛЕНИЯ СООСНЫМ ВЕРТОЛЕТОМ(57) Изобретение относится к области авиационной техники и касается системы управления вер(19) Я,5 (и) 3.826423 дз) А 3(51) 6 В 64 С 27 80 топетом. Целью изобретения является улучшение эксплуатационных характеристик за счет ограничения сближения лопастей несущих винтов, Система управпения соосным вертолетом содержит систему управления общим шагом и систему путевого управления. Система управления общим шагом соосного вертолета состоит из рычага общего шага 1 и соединенных шарнирно тяг и качалок 2,3 и 4 проводки, подходящей к золотнику гидроусилитепя 5 общего шага. От силового штока гидроусипителя 5 соединенная шарнирно и поспедовательно посредством качалок и тяг 6,7,8 проводка подходит к механизму общего и дифференциального шага 9. Механизм общего и дифференциального шага штангами 10 и 11 соединен ползунами 12,13 с автоматами перекоса 14, 15 на колонке 16. От автоматов перекоса через тяги и качалки на ползунах управление подходит к поводам лопастей 1 7,18. Система путевого управления соосного вертолета состоит из педалей 19 и соединенных шарнирно, тяг и качалок 20, 21, 22, 23, 24 проводки, подходящей к золотнику гидроусилителя 25 путевого управления. От силового штока гидроусилителя 25 путевого управления соединенная шарнирно и последовательно посредством тяг и качалок 26, 27, 28, 29 проводка подходит к механизму общего и дифференциального шага. К силовой качалке 26 через систему тросов качалок и тяг 30, 31, 32, 33, 34 подсоединен руль поворота 35. Профилированный упор 36 жестко скреплен с силовой качалкой 6 гидроусипителя 5 общего шага, С качалкой 23 проводки от педалей к золотнику гидроусилителя 25 путевого управления жестко закреплен рычаг 37 взаимодействующий с упором 36, 4 ип.5Изобретение относится к области авиационной техники и касается системы управления вертолетом.Целью изобретения является улучшение эксплуатационных характеристик за счет ограничения сближения лопастей несущих винтов.На фиг.1 схематично изображена схема управления соосным вертолетом; на фиг,2 - график зависимости ограничения хода путевого управления от величины изменения угла общего шага лопастей; на фиг.З - график сближения лопастей; на фиг,4 - графики, характеризующие эффективность и мощность путевого управления,Система управления соосным вертолетом содержит систему управления общим шагом и систему путевого управления.Система управления общим шагом соосного вертолета состоит из рычага общего шага 1 и соединенных шарнирно тяг и качалок 2, 3 и 4 проводки, подходящей к золотнику гидроусилителя общего шага 5. От силового штока гидроусилителя 5 соединенная шарнирно и последовательно посредством качалок и тяг б, 7, 8 проводка подходит к механизму общего и дифференциального шага (МОДШ) 9. Механизм общего и дифференциального шага штангами 10 и 11 соединен ползушками 12, 13 с автоматами перекоса 14, 15 на колонке 16. От автоматов перекоса через тяги и качалки на ползушках управление подходит к поводкам лопастей 17, 18.Система путевого управления соосного вертолета состоит из педалей 19 и соединенных шарнирно тяг и качалок 20, 21, 22, 23, 24 проводки, подходящей к золотнику гидроусилителя путевого управления 25. От силового штока гидроусилителя путевого управления 25 соединенная шарнирно и последовательно посредством качалок и тяг 26, 27, 28, 29 проводка подходит к МОДШ. Далее штангами 10, 11 проводка подходит к лопастям на колонке 16 так же, как и управление общим шагом. К силовой качалке 26 через систему тросов, качалок и тяг ЗО, 31, 32, 33, 34 подсоединен руль поворота 35.Профилированный упор 36 жестко скреплен с силовой качалкой 6 гидроусилителя общего шага 5. С качалкой 23 проводки от педалей к золотнику гидроусилителя 25 путевого управления жестко скреплен рычаг 37, взаимодействующий с упором Зб.Предлагаемая система управления соосным вертолетом работает следующим образом.При перемещении рычага общего шага.1 на большой шаг гидроусилитель 5 поворачивает качалку б с профилированным упо 5 10 15 20 ром, передавая по тяге 7, качалке 8, МОДШ 9, штанге 10 и 11 движение к лопастям колонки 16. При увеличении общего шага профилированный упор 36 будет приближаться к рычагу 37 качалки 23. При определенной величине общего шага, равного -15, наступит такой момент, когда упор 36, приблизившись к рычагу 37 качалки 23, начнет ограничивать своим профилем возможное, в случае перемещения от нейтрального положения педалей 19 отклонение рычага 37. При этом будет ограничено отклонение педалей 19 гидроусилителя путевого управления 25, а с ним и угловые дифференциальные отклонения лопастей и рулей,Если педали находятся не в нейтральном положении, то при увеличении общего шага до определенного значения може". наступить такой момент, когда профилированный упор 36 коснется рычага 37 и 50 управления ограничением выбрать таким, чтобы до величины угла общего шага, равного 15, отсутствовало бы ограничение хода педалей, а при увеличении общего шага сверх этой величины, вводилось бы постепенное ограничение до 50; хода путевого управления, при максимальном угле общего шага.Закон предусматривает симметричны 55 дачи педалями при управлении летчикг вертолетом, поэтому ограничение ододи 1 передвинет его в сторону нейтрального положения. При этом передвинутся педали 19, гидроусилитель 35 и далее вся цепь, вплоть до лопастей колонки, уменьшив отклонение путевого управления. Летчик не в силах ногами сдержать перемещение педалей, так как профилированный упор 36 силовой качалки 6 под действием гидроусилителя общего шага перемещает педали и всю ЗО проводку со стороны золотника гидроусилителя путевого управления.График, изображенный на фиг.2, представляет зависимость между величиной угла общего шага лопастей и величиной ограни. чения хода путевого управления.Ввиду того, что с ростом подаваемоймощности винтами и с ростом скорости полета увеличивается общий шаг несущих винтов, существует и на основе летных ис пытаний установлена однозначная связьмежду сближением лопастей и величиной общего шага.Учитывая вышесказанное об однозначной связи между величиной общего шага и 45 сближением лопастей, связанным с увеличением скорости и подаваемой мощности на винты, можно ограничение хода педалей непосредственно связать с величиной общего шага лопастей. При этом необходимо закон5 10 15 20 25 ЗО 35 40 45 50 55 не только для правой педали, но и для левой. Симметрия в ограничении обеспечивает летчику естественное (симметричное) ощущение летательного аппарата при разворотах,Уменьшение сближения лопастей показано на фиг.З. Лопасти значительно уменьшают свое сближение на максимальных скоростях при действии упора, ограничивачющего отклонение правых педалей в зоне значений общего газа от15 О до 20 О. На графике это обозначено заштрихованной зоной. Значение точек на графике получено в результате летных испытаний вертолета.Благодаря ограничению величины дифференциального шага путевого управления при максимальных величинах углов общего шага уменьшается сближение лопастей соосных несущих винтов,На фиг,4 (верхний график) представлены для горизонтального полета располагаемце угловые ускорения, характеризующие эффективность и мощность путевого управления, которое на соосном вертолете осуществляется за счет изменения разности крутящих моментов несущих винтов вследствие изменения дифференциального общего шага и за счет момента от планера вследствие одновременного (с дифференциальным общим шагом) отклонения рулей направления.Эти зависимости представлены для вертолета без предложенного устройства (пунктир) и с предложенным устройством ограничения хода педалей по величине общего шага.Еще ниже представлены зависимости:У ош = 1(ч); ХН% = т(ч)где Уо - величина общего шага.Хн% - располагаемый ход путевого управления, ограниченный предложенным устройством по величине общего шага.Представленные на фиг.4 графики, а также результаты летных испытаний показывают, что наиболее критичными с точки зрения эффективности путевого управления являются режимы полета с малыми скоростями до ч а 140 км/ч. На указанных режимах эффективность путевого управления меньше, чем эффективность на режиме висения, При выборе параметров управления эти особенности учитываются и, фактически, для режимов горизонтального полета расчетными являются режимы полета при ч - 60 - 90 км/ч, где минимальная эффективность путевого управления,Из графика видно, что с увеличением скорости полета более 140 км/ч эффективность путевого управления существенно растет и с учетом ограничений, накладываемых предложенным устройством, достигает своего максимума на скоростях, близких к крейсерским (ч =250 км/ч). На этом режиме эффективность управления превышает минимально допустимую примерно в четыре раза. При дальнейшем увеличении скорости полета эффективность путевого управления падает и на режимах, близких к чвах, превышает минимально допустимую величину примерно в 2,87 раза.Таким образом на соосном вертолете, ввиду особенностей конструкции системы путевого управления, использования ком- бинированногО управления через винт и планер, а также ввиду существенного роста эффективности путевого управления с ростом скорости при ч140 км/ч, введение ограничений хода педалей по величине общего шага практически не влияет на характеристики путевой управляемости вертолета, так как параметрц путевого управления подбираются иэ условия обеспечения приемлемых характеристик управляемости на малых скоростях, На больших скоростях запасы по эффективности управления позволяют беэ ухудшения ЛТХ вертолета снизить эффективность путевого управления по предложенному закону.При использовании предложенного устройства эффективность путевого управления уменьшается на малых скоростях при увеличении общего шага до максимума, например, при вертолетном взлете с вращением вокруг оси на 360.Необходимость указать, что с ростом подаваемой на винт мощности растет эффективность путевого управления через дифференциальный общий шаг, Кроме этого, на укаэанном режиме "вертушка" даже с ограниченным ходом путевого управления ввиду малого демпфирования вращения (отсутствие хвостового винта) развиваются большие угловые скорости и, как правило, в этих случаях полный ход педалей не используется,Таким образом, летные испытания вертолета во всем эксплуатационном диапазоне режимов, в том числе и при выполнении всех регламентированных в РЛЭ маневрах, подтвердили, что введение в систему путевого управления предложенного устройства практически не влияет на характеристики управляемости и маневренности вертолета на всех регламентированных в РЛЭ маневрах, но при этом существенно улучшается одна иэ основных эксплуатационных характеристик соосного вертолета - безопасность по сближению лопастей.10 1826423 У. дро 8 оя редола ьформула изобретенияСИСТЕМА УПРАВЛЕНИЯ СООСНЫМ ВЕРТОЛЕТОМ с системой путевого управления, включающей педали, гидро- усилитель путевого управления с золотником, соединенным с проводкой путевого управления качалкой управления золотником, и с системой управления общим шагом, включающей рычаг общего шага, гидроусилитель общего шага с силовым штоком, соединенным посредством качалки силового штока с проводкой управления общим шагом, отличающаяся тем, что, с целью улуч,шения эксплуатационных характеристик за счет ограничения сближения лопастей несущих винтов, система путевого управления снабжена рычагом, установ ленным жестко на качалке управлениязолотником гидроусилителя путевого управления, а система управления общим шагом снабжена ограничителем, жестко установленным на качалке силового штока гидроусилителя общего шага, при этом ограничитель выполнен профилированным с возможностью взаимодействия с рычагом системы путевого управления.1826423 ЛУ лю Корректор М. Петрова изводственно-издательский комбинат "Патент", г. Ужгород, ул.Гагарина, 101 Редактор Заказ 130 оставитель А, Козыревехред М.Моргентал Тираж Подп НПО "Поиск" Роспатента13035, Москва, Ж, Раушская наб., 4/5
СмотретьЗаявка
4840107/23, 18.06.1990
Ухтомский вертолетный завод им. Н. И. Камова
Купфер М. А, Петросян Э. А, Лазаренко Ю. А, Козырев А. И, Сухарев В. И, Хегай Р. И, Чупин В. П
МПК / Метки
МПК: B64C 27/80
Метки: вертолетом, соосным
Опубликовано: 10.12.1995
Код ссылки
<a href="https://patents.su/6-1826423-sistema-upravleniya-soosnym-vertoletom.html" target="_blank" rel="follow" title="База патентов СССР">Система управления соосным вертолетом</a>
Устройство для гашения вибраций лопастей несущего винта вертолета

Номер патента: 1792078
Опубликовано: 20.09.1995
Авторы: Воронков, Ганюшкин, Соболь
МПК: B64C 27/32
Метки: вертолета, вибраций, винта, гашения, лопастей, несущего
...от центра жесткости лопасти, и с осями качания; установленными в кронштейне на комле лопасти под острым отрицательным углом к хорде лопасти, маятники установлены на автономных осях качания.На фиг.1 показан вид сверХу на комлевую часть лопасти с установленйым устройством для гашения вибраций лопастей несущего винта вертолета; на фиг,2 - устройство на лопасти при аиде с комля (повернуто на 90 против часовой стрелки),На лопасти 1 с осью жесткости сечении2 с помощью кронштейна 3 установлено устройство гашения вибраций, В кронштейне установлены автономные валики 4 и 5, реа лизующие автономные оси качания, на которых, соответственно, расположены рычаги 6 и 7, на рычагах - грузы (маятники) 8 и 9. На кронштейне имеются упоры 10 и 11 для...
Устройство для замера разбежки лопастей несущего винта вертолета

Номер патента: 129250
Опубликовано: 01.01.1960
Автор: Голосов
МПК: B64C 27/32, G01M 19/00
Метки: вертолета, винта, замера, лопастей, несущего, разбежки
...с узкой диаграммой направленности, служащую излучателем высокочастотных импульсов, устанавливают в непосредственной олизосгн от самолета так, чтооы максимуз 1 излучения был направлен в сторону концов вращающихся лопастей, и подключают ее к приемопередатчику, На концах лопастей укрепляют полоски фольги различных размеров для того, чтобы по интенсивности отраженных от них сигналов определять импульсы, отраженные от той или иной лопасти винта, После приема эти сигналы усиливают и подают на индикатор, служащий для определения разбежки лопастей. В качестве индикатора может быг применен радиолокационный индикатор дальность-высота с развергкой изображения в прямоугольнь 11 х координатах нлн индикатор дальность-угол места.Предмет изобретения...
Фиксатор лопастей винта регулируемого шага

Номер патента: 459379
Опубликовано: 05.02.1975
Автор: Лучанский
МПК: B63H 3/08
Метки: винта, лопастей, регулируемого, фиксатор, шага
...эффективность пния таких фиксаторов. 15Цель изобретения - сокращение времени нааварийную фиксацию лопастей.Для этого в предлагаемом фиксаторе смонтирован пневмогидравлический аккумулятор,сообщающийся трубопроводами с домкратами, 20причем на трубопроводе установлен кран.На чертеже изображен общий вид предлагаемого фиксатора.Гидравлические д настенке 2 корпуса 3 убопроводом 4 резавлическим ак ля всебя полости 8 9. Предлагаемый фиксатор работает следующим образом.При необходимости аварийной фиксации лопастей требуется остановить валопровод и открыть кран 5. Сжатый воздух из полости 7 через эластичную мембрану 9 выталкивает рабочую жидкость из полости 8, и штоки 10 домкратов отжимают поршень 11, соединенный штангой 12 с механизмом...
Устройство для исследования аэродинамических сил, действующих на отсек лопасти винта вертолета

Номер патента: 378127
Опубликовано: 25.10.1977
МПК: G01M 9/00
Метки: аэродинамических, вертолета, винта, действующих, исследования, лопасти, отсек, сил
...лопасти. К наружной рамке омпенсационных весов 14 спомощью отверстий 16 крепятся специальноподбираемые массы, имитирующие массу очсеа.лопасти,. Упругие балочки 17 основныхвесов предназначены для измерения полныхсилы У и момента М . Упругие бапоч.,ки,18 основных весов предназначены дляизмерения полной силы Х ,Дналогичную конгтрукцию имеют компенсационные весы, упругие балочки 19 оторых предназначены дпяизмерения инерционных силы У и моментаМ, действующих на помещенные внутриотсека лопасти массы, Упругие балочки 20 предназначены для измерения инерционной силых.Соответствующие .тензометричесие датче Оки основных и компенсационных весов соеди.няются в одну электрическую цепь по схемеэлектрического вычитания., Таким образом,при...
Стенд для ресурсных испытаний электрожгутов системы антиобледенения лопастей рулевого винта вертолета с карданной подвеской втулки винта к валу
Номер патента: 430721
Опубликовано: 20.07.2004
Авторы: Бакиев, Боровский, Гончаров, Лисс, Тюхтиенко
МПК: G01M 7/00
Метки: антиобледенения, валу, вертолета, винта, втулки, испытаний, карданной, лопастей, подвеской, ресурсных, рулевого, системы, стенд, электрожгутов
Стенд для ресурсных испытаний электрожгутов системы антиобледенения лопастей рулевого винта вертолета с карданной подвеской втулки винта к валу, содержащий станину, на которой установлен привод, на валу которого закреплена испытываемая втулка, и механизм нагружения, в качестве одного из элементов которого используется проводка управления шагом винта, отличающийся тем, что, с целью приближения условий испытания к условиям летной эксплуатации, стенд снабжен вторым элементом механизма нагружения, выполненным в виде кронштейна, прикрепленного к втулке винта и снабженного установленным соосно с втулкой винта подшипником, прикрепленным к станине таким образом, что ось втулки винта наклонена...
Предыдущий патент: Вентиляционный блок
Следующий патент: Способ изготовления волноводного вывода энергии
Случайный патент: Рабочий орган камнерезной машины