Система программного логического управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
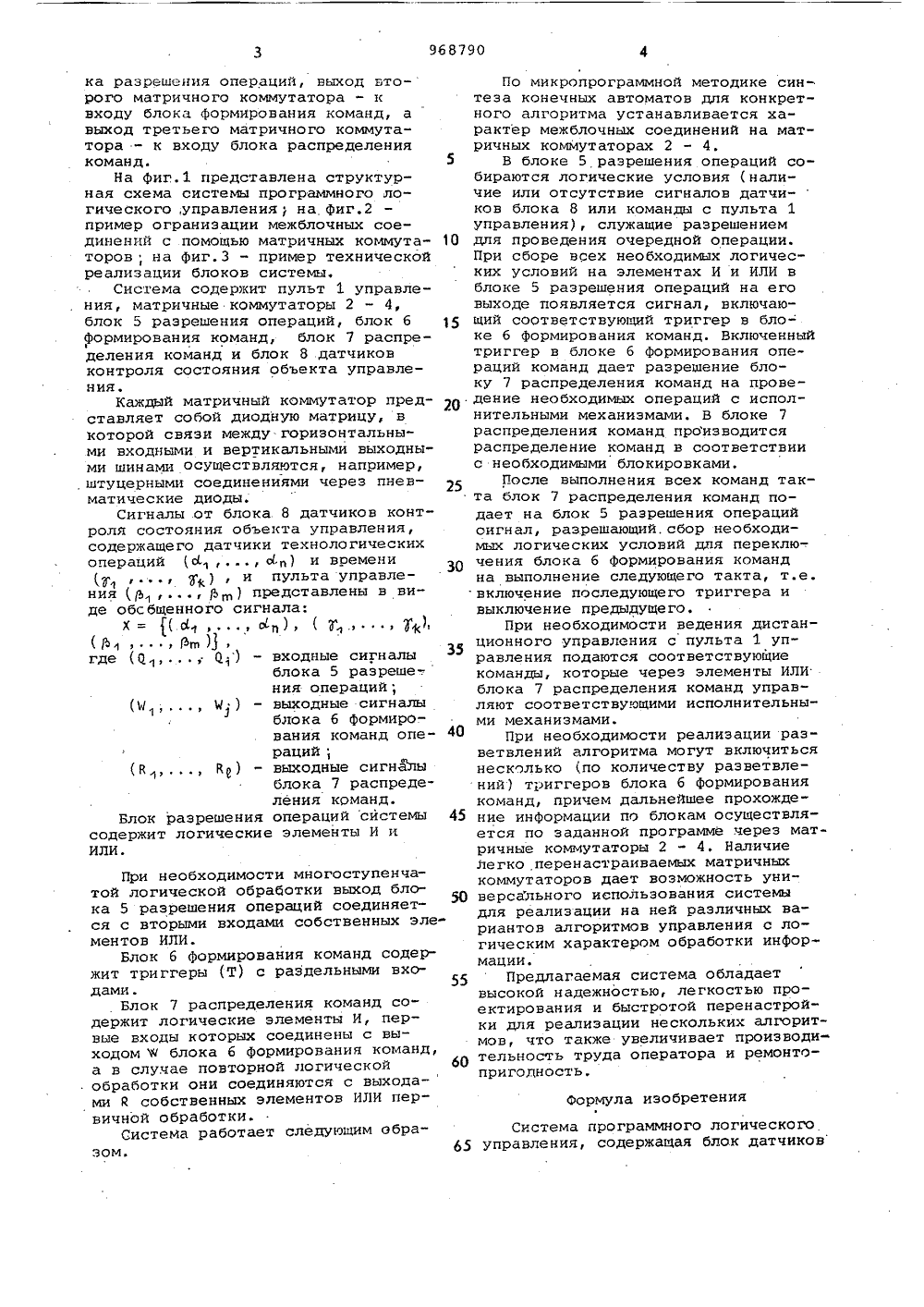
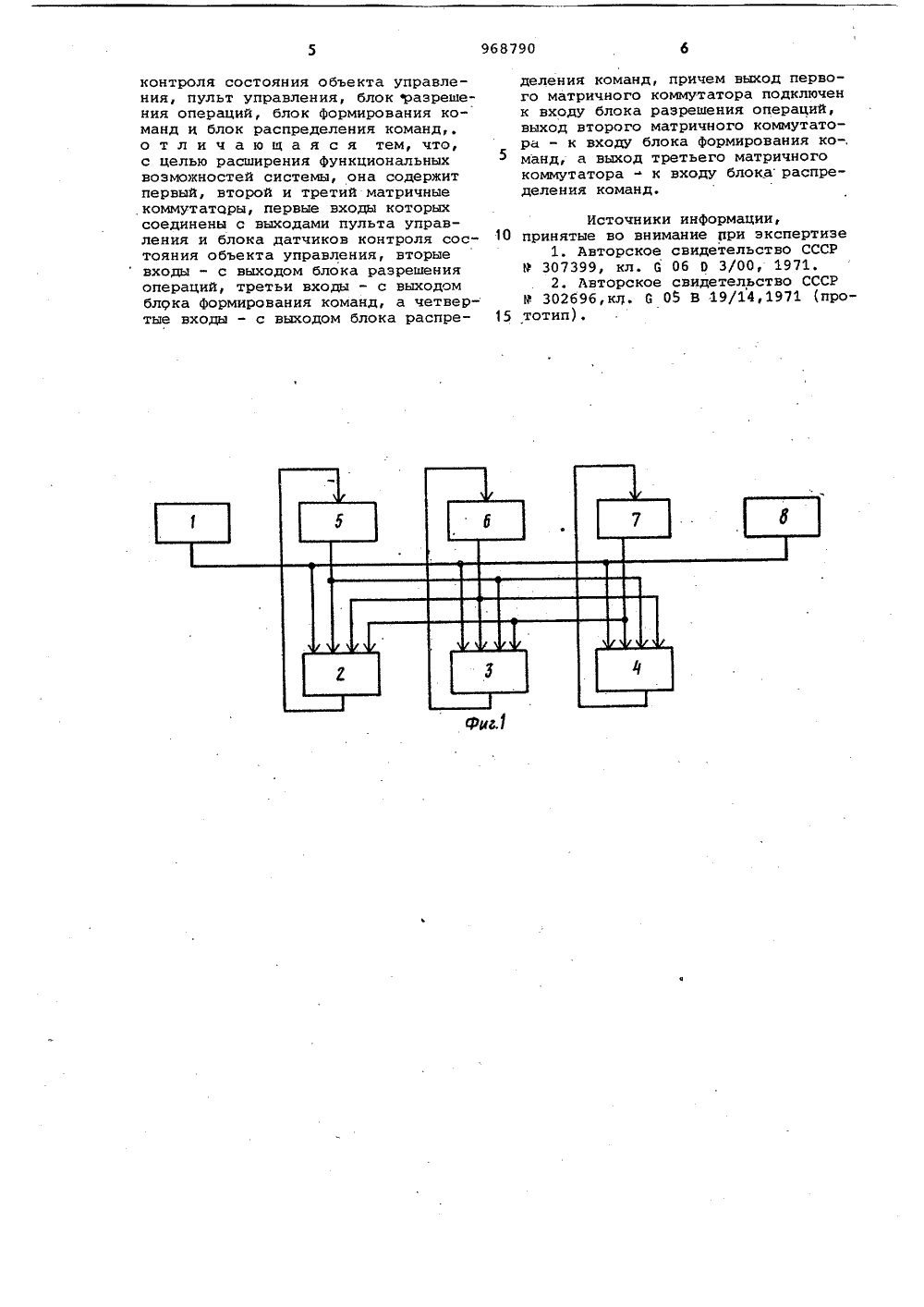
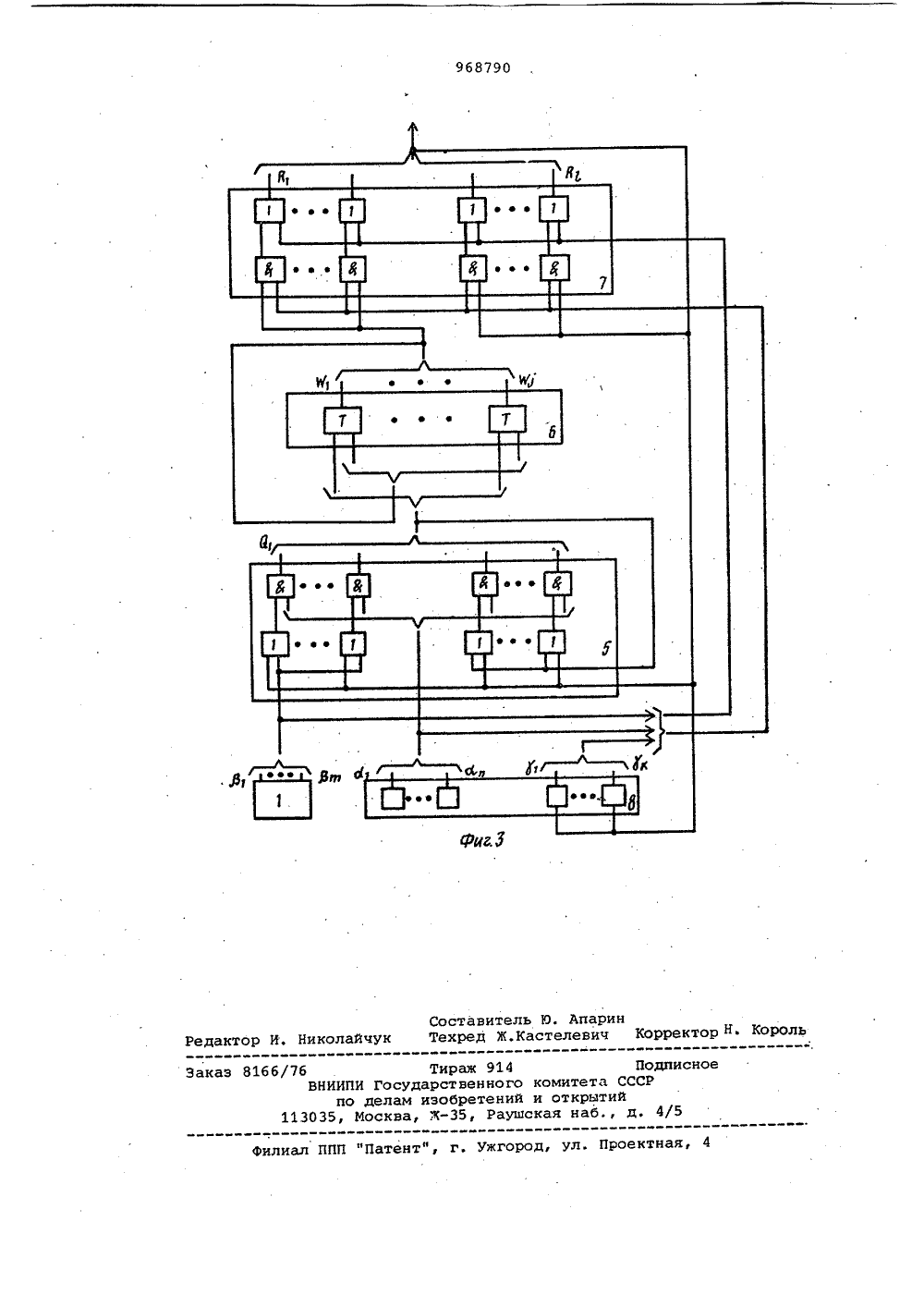
ОПИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз Советских(22) Заявлено 080581 (21) 3288913/18-24 0 05 В 19/10 с присоединением заявки Мо(23) Приоритет -Государственный комитет СССР по дедам изобретений и открытий(54) СИСТЕМА ПРОГРАММНОГО ЛОГИЧЕСКОГО УПРАВЛЕНИЯИзобретение относится к программным логическим системам управления группой разнотипных агрегатов с циклическим процессом производства, характеризующимся дискретными технологическими операциями.Известна система управления, которая содержит блоки разрешения операций, блоки операций, блоки распределения, блоки коммутации, датчики контроля и времени 1 1.Однако эта система имеет жестко закрепленные межблочные связи, что ограничивает ее функциональные возможности. Для неехарактерна трудность реализации разветвленных алгоритмов, сложность проектирования конкретных устройств, большая избыточность логических элементов и элементов памяти, что приводит к понижению надежности и быстродействия.Наиболее близкой к предлагаемой является система управления, которая содержит блок разрешения операций, блок операций, блок распределения команд и генератор тактовыхимпульсов (2).Однако известная система имеет ограниченные функциональные возможности, так как не приспособлена для реализации алгоритмов с параллельными ветвями. Применение в нейпневматических переключателей понижаетнадежность системы и увеличивает еестоимость. Применение языков программирования высшего уровня и значительные аппаратурные затраты делают систему сложной,Целью .изобретения является расширение функциональных воэможностейсистемы.Поставленная цель достигаетсятем, что система программного логического управления, содержащая блокдатчиков контроля состояния объектауправления, пульт управления, блокразрешения операций, блок формирования .команд и блок распределения команд, содержит первый, второй и третий матричные коммутаторы, первыевходы которых соединены с выходамипульта управления и блока датчиковконтроля состояния объекта управления, вторые входы - с выходом блока разрешения операций, третьи вхо"ды - с выходом блока формированиякоманд, а четвертые входы - с выходом блока распределения команд,причем выход первого матричногокоммутатора подключен к входу блока разрешения операций, выход второго матричного коммутатора - к входу блока формирования команд, а выход третьего матричного коммутатора - к входу блока распределения команд. 5На Фиг 1 представлена структурная схема системы программного логического,управления; на фиг.2 пример огранизации межблочных соединений с помощью матричных коммута торов; на фиг.З - пример технической реализации блоков системы.Система содержит пульт 1 управления, матричные коммутаторы 2 - 4, блок 5 разрешения операций, блок б 15 формирования команд, блок 7 распределения команд и блок 8 датчиков контроля состояния объекта управления.Каждый матричный коммутатор представляет собой диодную матрицу, в которой связи между горизонтальными входными и вертикальными выходными шинами осуществляются, например, штуцерными соединениями чеРез пневматические диоды.Сигналы от блока 8 датчиков конт- ролЯ состояния объекта управления, содержащего датчики технологических операций (К с(,) и времени (у у,), и пульта управления (р., )Ьд,) представлены в виде обсбщенного сигнала:= ), ( т У 1,),35 где (,; ) - входные сигналыблока 5 разреше-.ния операций;(Й К) - выходные сигналыблока 7 распределения команд.Блок разрешения операций системы 45 содержит логические элементы И и ИЛИ. При необходимости многоступенчатой логической обработки выход блока 5 разрешения операций соединяется с вторыми входами собственных элементов ИЛИ.Блок 6 Формирования команд содержит триггеры (Т) с раздельными вхо 55 дами.Блок 7 распределения команд содержит логические элементы И, первые входы которых соединены с выходом % блока б Формирования команд, а в случае повторной логической обработки они соединяются с выхода-ми Й собственных элементов ИЛИ первичной обработки.Система работает следующим образом. 65 По микропрограммной методике синтеза конечных автоматов для конкретного алгоритма устанавливается характер межблочных соединений на матричных коммутаторах 2 - 4.В блоке 5 разрешения операций собираются логические условия (наличие или отсутствие сигналов датчиков блока 8 или команды с пульта 1 управления), служащие разрешением для проведения очередной операции. При сборе всех необходимых логических условий на элементах И и ИЛИ в блоке 5 разрешения операций на его выходе появляется сигнал, включающий соответствующий триггер в бло- ке 6 формирования команд. Включенный триггер в блоке б формирования операций команд дает разрешение блоку 7 распределения команд на проведение необходимых операций с исполнительными механизмами. В блоке 7 распределения команд производится распределение команд в соответствии с необходимыми блокировками.После выполнения всех команд такта блок 7 распределения команд подает на блок 5 разрешения операций сигнал, разрешающий. сбор необходимых логических условий для переклю-. чения блока б Формирования команд на выполнение следующего такта, т.е. включение последующего триггера и выключение предыдущего.При необходимости ведения дистанционного управления с пульта 1 управления подаются соответствующие команды, которые через элементы ИЛИ блока 7 распределения команд управляют соответствующими исполнительными механизмами.При необходимости реализации разветвлений алгоритма могут включиться несколько (по количеству разветвлений) триггеров блока б формирования команд, причем дальнейшее прохождение информации по блокам осуществляется по заданной программе через матричные коммутаторы 2 - 4, Наличие легко перенастраиваемых матричных коммутаторов дает возможность универсального использования системы для реализации на ней различных вариантов алгоритмов управления с логическим характером обработки информации.Предлагаемая система обладает высокой надежностью, легкостью проектирования и быстротой перенастройки для реализации нескольких алгоритмов, что также увеличивает производи тельность труда оператора и ремонтопригодность. Формула изобретенияСистема программного логическогоуправления, содержащая блок датчиковконтроля состояния объекта управления, пульт управления, блок фразрешения операций, блок формирования команд и блок распределения командо т л и ч а ю ш а я с я тем, что,с целью расширения функциональныхвозможностей системы, она содержитпервый, второй и третий матричныекоммутатОры, первые входы которыхсоединены с выходами пульта управления и блока датчиков контроля состояния объекта управления, вторыевходы - с выходом блока разрешенияопераций, третьи входы - с выходомблока формирования команд, а четвер-тые входы - с выходом блока распределения команд, причем выход первого матричного коммутатора подключен к входу блока разрешения операций, выход второго матричного коммутатора - к входу блока формирования ко-, манд, а выход третьего матричного коммутатора - к входу блока распределения команд.Источники информации,10 принятые во внимание при экспертизе 1. Авторское свидетельство СССР Р 307399, кл. О 06 О 3/00 1971. 2. Авторское свидетельство СССР Р 302696,кл. О 05 В 19/14,1971 (про 15 тотип),968790 оставитель И. Апар ехред Ж.Кастелевич рректор Н едактор И айчу Тираж 914 ПодлиснГосударственного комитета СССРделам изобретений и открытийосква, Я, Раушская наб., д. 4/5 Заказ 8166 76 ИИ и
СмотретьЗаявка
3288913, 08.05.1981
Заявитель
БЫЧКОВ ВЯЧЕСЛАВ АНАТОЛЬЕВИЧ, ПОТЕПАЛОВ ЮРИЙ НИКОЛАЕВИЧ, ЧИК ВИКТОР ГЕРАСИМОВИЧ
МПК / Метки
МПК: G05B 19/10
Метки: логического, программного
Опубликовано: 23.10.1982
Код ссылки
<a href="https://patents.su/5-968790-sistema-programmnogo-logicheskogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Система программного логического управления</a>
Способ формирования из однофазного напряжения трехфазной системы периодических напряжений для питания частотно управляемых электроприводов

Номер патента: 1676058
Опубликовано: 07.09.1991
Авторы: Брагилевский, Вернигора, Донцов, Завадский, Карасев, Коваль, Кутлер, Микитчук, Певзнер, Порываева
МПК: H02P 7/42
Метки: напряжений, однофазного, периодических, питания, системы, трехфазной, управляемых, формирования, частотно, электроприводов
...полуволне - Опс тиристоров 11, 12, 1 з16, Из диаграмм на фиг, 1 видно, что на каждом временном интервале имеется разрешение на включение пары тиристоров, например, 11 и 12, 12 и 13, 13 и 14 и т,д. При положитель" ных полуволнах питающего напряжения +Опс или 11, И 12, 12, и 13, 13 и 14 и тд, ПРи отрицательных полуволнах питающего напряжения - Опс. Синхронизация блока 6 фаэоимпульсного управления осуществляется от сети через трансформатор блока 7 питания, который подключен к трем фазам питающей сети с целью снижения пульсаций при формировании напряжений питания схемы управления + О, - О, Управляющие выходы Оых блока 6 фазоимпульсного управления связаны с электродами управления тиристоров силового блока. Блок 3 контроля тока и временной...
Способ формирования трехуровнего сигнала в релейных системах управления динамическим объектом и релейный регулятор для его осуществления

Номер патента: 1758633
Опубликовано: 30.08.1992
Автор: Леденев
МПК: G05B 11/14
Метки: динамическим, объектом, регулятор, релейный, релейных, сигнала, системах, трехуровнего, формирования
...соответственно рявнк Н = О, ц й=/ (0 ( 0 обозначает цп як ц и у р о ц е и ьвыходного сигнала), Гм г:огцц.е спгцлзд лпервого 8, второго 9, тр(.т; око 1 йи четвертого 11 элементовсоатпст(4) Тогда стелло равнлг Кв = О, Г г =- О, К = Ои К = О, Выходной сигнал третьегоэгемента ИЛИ 16 У = О (первый выходустройства 23), выходной сигнал четвертого элемента ИЛИ 17 11+ = О (второй выход устройства 24), вследствиечего инверсный выходной сигнал пятогоэлемента ИЛИ 18 К = 1("1 ф обозначает7высокий уровень выходного сигнала) 10и этот сигнал производит обнулениевторого интегратора 2 1 (выходной сигггал этого интегратора Я = О),При Х ) О выходной сигнал первогоинтегратора 5 1 = Д, В этом случае 15срабатывает четвертый компаратор 7(его уровень...
Рециркуляционный преобразователь напряжения в код двойного уравновешивания

Номер патента: 884129
Опубликовано: 23.11.1981
МПК: H03K 13/17
Метки: двойного, код, рециркуляционный, уравновешивания
...аналогового сумматора (интегра- дтора) 1 через коммутатор 2 соединеныс входной шиной 3 устройства, выходамиисточника 4 уравновешивающего напряжения и аналоговых запоминающих блоков5 и 6. Выход аналогового сумматора (ин"тегратора) 1 соединен с входами аналоговых запоминающих блоков О и 6, выходы которых соединены с входами блока 7 сравнения, цифровой выход которого соединен с входом блока 8 управценияи формирования кода, выходы которогосоединены с входами управления коммутатора 2, источника 4 уравновешивающего напряжения, анапоговых запоминающихблоков 5 и 6 и блока 7 сравнения, аналоговый выход которого соединен с вхо 40дом коммутатора 2,Устройство работает следующим обраэом,В устройстве реализуется алгоритмдвойного уравновешивания, в...
Интегрирующий преобразователь напряжения в код

Номер патента: 974566
Опубликовано: 15.11.1982
МПК: H03K 13/02
Метки: интегрирующий, код
...вход интегратора 1 через коммутатор 3 соединен с входной шиной 4 устройства. Второй вход интег ратора 1 и вход интегратора 2 через коммутатор 3 соединен с шиной 5 источника эталонного напряжения, Выходы интеграторов 1 и 2 соединены с входами блока 6 сравнения, выход ко торого соединен с входом блока 7 управления и формирования кода. Выходы блока 7 управления и формиронания кода соединены с входами управления коммутатора 3 и интегратора 1 и 2.Устройство работает следующим образом.Перед началом преобразования сигналом из блока 7 управления и формирования кода интегратор 1 и 2 обнуляются, В первом такте преобразования 1 фиг.2) напряжение 01 с входной шины 4 устройства передается коммутатором 3 на первый вход интегратора 1. Эталонное...
Устройство для контроля блоков оперативной памяти

Номер патента: 957276
Опубликовано: 07.09.1982
Авторы: Варнаков, Вершков, Парфенов, Прокошенков, Чумакова
МПК: G11C 29/00
Метки: блоков, оперативной, памяти
...12 и далее вовнешнее устройство. Одновременно блок 4выдает во внешнее устройство через выход17 сигнал сопровождения текущего числа,свидетельствующий о наличии информациина выходах 12,После считывания первого числа внешнееустройство посылает по входу 15 в блок 4сигнал разрешения передачи числа, по которому блок 4 обеспечивает считывание информации из второй ячейки блока 11 памяти и т,д., пока не будет передан во внешнееустройство весь массив информации из блока 11, размер которого определяется такжевнешним устройством.5В контрольных режимах устройство работает следующим образом.В случае проверки операндных цепей вустройство записываются и далее считываются заранее известные эталонные массивы, 20при этом работа устройства аналогична...
Предыдущий патент: Устройство для программного управления
Следующий патент: Устройство для испытания электрических контактов
Случайный патент: Исполнительный орган горной машины