Система управления процессомперегрузки материала
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 818515
Авторы: Бодиловский, Нагорский

Текст
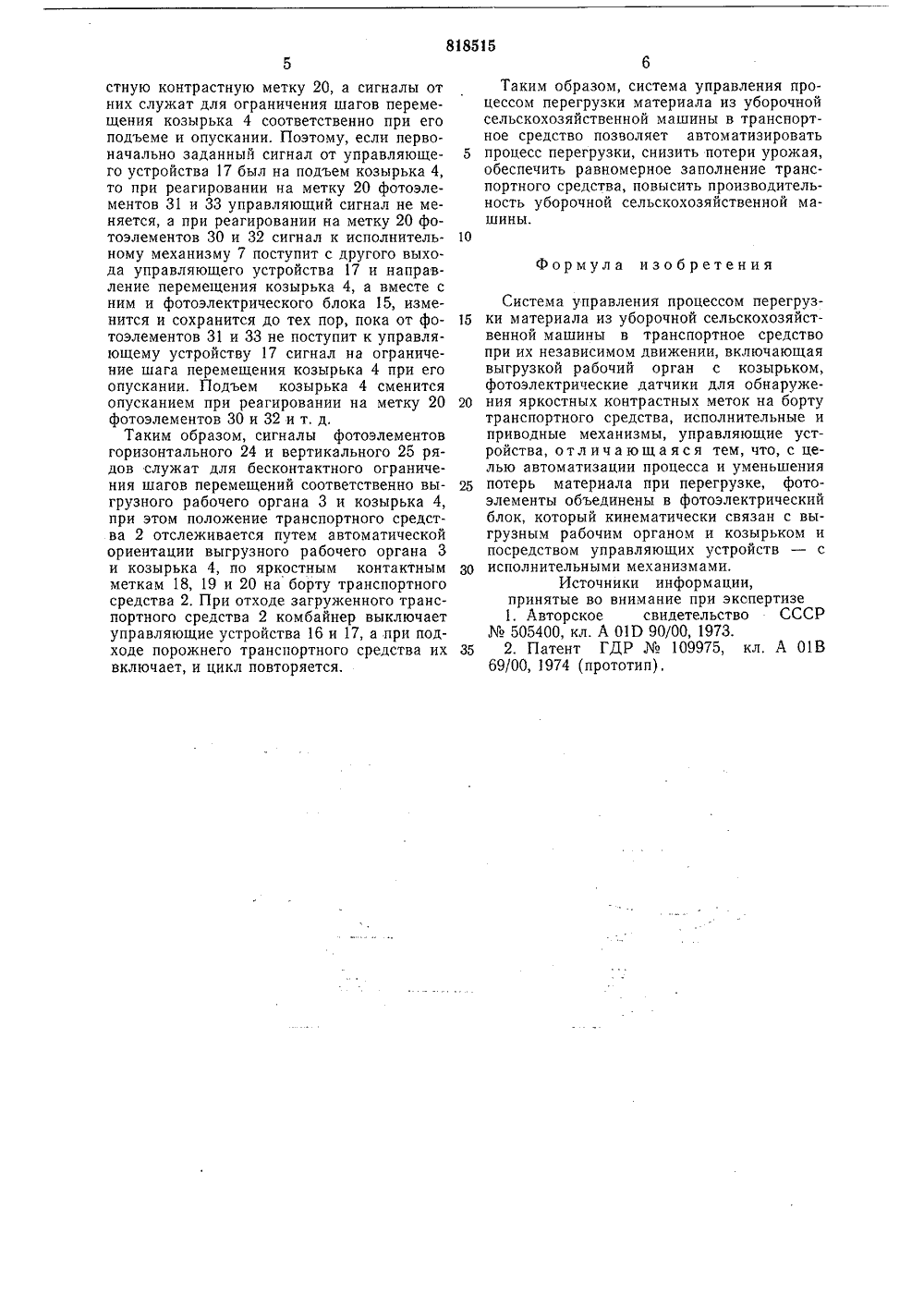
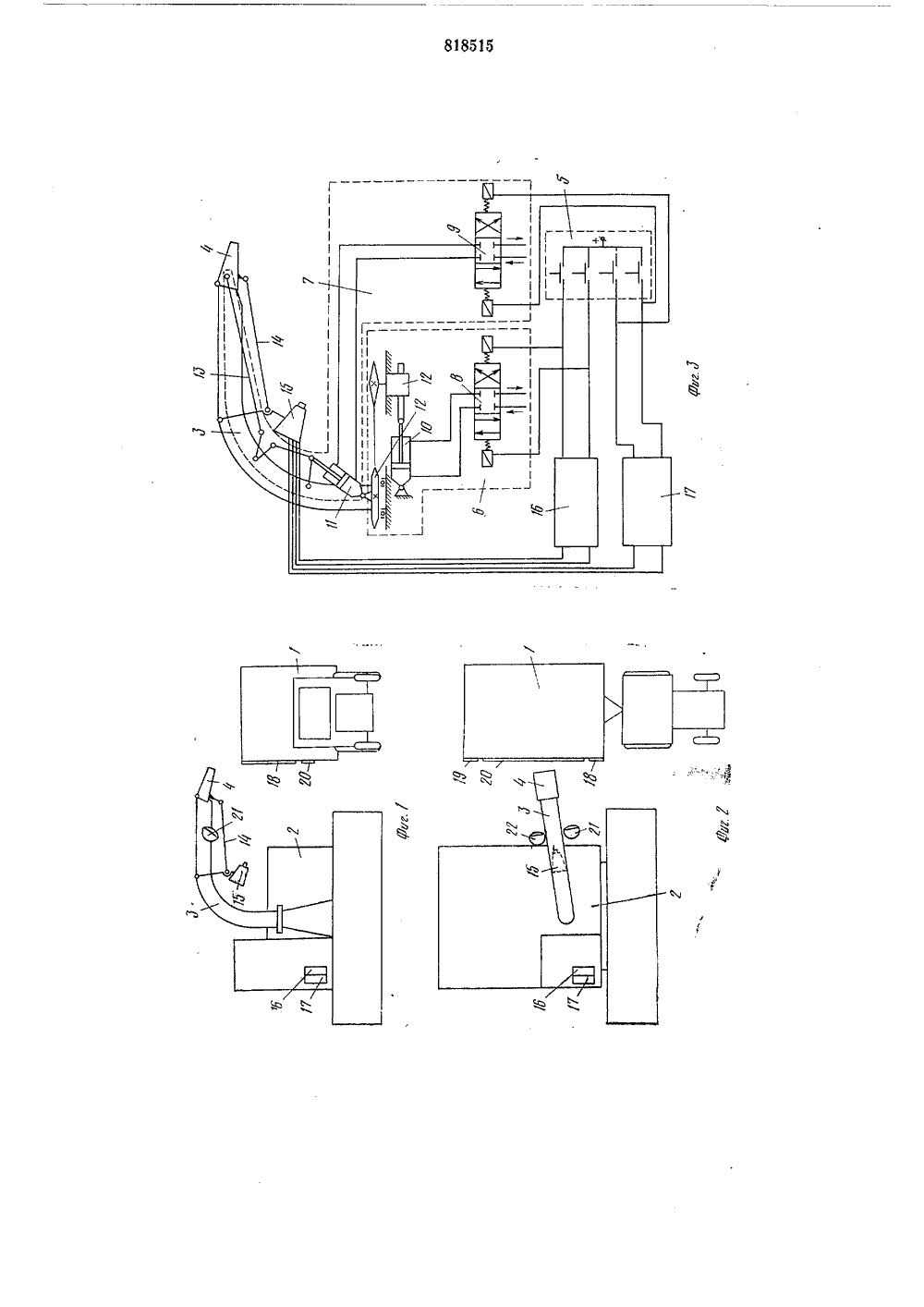
О П И С А Н И Е (п)8185 бИЗОБРЕТЕНИЯ К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз Советских Седиадистических Республик(45) Дата опубликования описания 07,04.8(51) М. Кл,А 01 В 69/00 В 6 Ж 67/22 Государственный камнтв СССР па делам изобретений н открытий(71) Заявитель И. С. Нагорский и Д, В, Б нтральный научно-исследовательский электрификации сельского хозяйствСССР ВЛЕНИЯ ПРОЦЕССОМ ПЕРЕГРУ МАТЕРИАЛА) СИСТЕМА 2 Изобретение относится к области автоматизации технологических процессов и может быть использовано для управления процессом перегрузки материала из машины в транспортное средство при их независимом 5 движении, преимущественно при передаче урожая из уборочной сельскохозяйственной машины.Известна система управления процессом перегрузки материала из уборочной сель скохозяйственной машины в транспортное средство, когда между транспортным средством и исполнительным механизмом перемещения выгрузного рабочего органа существует механическая связь 11. Она не поз воляет управлять процессом при независимом движении уборочной машины и транспортного средства,Известна система управления процессом перегрузки материала из уборочной сель скохозяйственной машины в транспортное средство, когда для контроля продольных отклонений транспортного средства относительно уборочной машины на остове последней установлено два фотоэлектрических датчика, реагирующих на вертикальную яркостную контрастную метку на борту. Для контроля поперечного расстояния между транспортным средством и уборочной машиной на выгрузном рабочем органе не подвижно относительно уборочной машины установлено четыре фотоэлектрических датчика, реагирующих на горизонтальную яркостную контрастную метку, нанесенную по верхней кромке борта, причем основными фотоэлектрическими датчиками являются только два из них, образующие совместно с двумя дополнительными фотоэлектрическими датчиками въездной сектор для облегчения водителю транспортного средства въезда в желаемое положение. Конструкция всех фотоэлектрических датчиков одинакова. Датчик выполнен в виде двухлинзового телеобъектива с встроенным фотоэлементом. Свет, отраженный от отметки и борта, преобразуется в электронной части устройства в электрические импульсы, причем светло-темный переход вызывает положительный импульс, а темно-светлый - отрицательный. Эти импульсы поступают на логическую схему, выходы которой связаны с показывающим устройством. Сигналы показывающего устройства информируют водителя уборочной машины о положении относительно последней транспортного средства. Посредством радиосвязи сигналы с показывающего устройства, установленного на уборочной машине, передаются к установленному на транспортном средстве показывающему устройству, которое используется для ручного управления процессом перегрузки урожая 2. Однако при работе с энергонасыщенной самоходной уборочной машиной, скорость которой велика и к тому же непостоянна, ручное управление процессом перегрузки урожая не позволит снизить до минимума потери урожая от непопадания в транспортное средство и тем более обеспечить равномерное заполнение последнего. Кроме того, недостатком устройства является необходимость оборудования каждого транспортного средства приемным и показывающим устройствами, что требует определенных технических и эксплуатационных затрат.Целью настоящего изобретения является автоматизация процесса и уменьшение потерь материала при перегрузке.Поставленная цель достигается тем, что фотоэлементы объединены в фотоэлектрический блок, который кинематически связан с выгрузным рабочим органом и козырьком и посредством управляющих устройств - с исполнительными механизмами.На фиг. 1 показан уборочный комплекс, вид спереди; на фиг. 2 - то же, вид сверху; на фиг. 3 схематично показана система управления процессом перегрузки материала; на фиг. 4 - устройство фотоэлектрического блока; на фиг. 5 изображена схема соединения фотоэлементов в фотоэлектрическом блоке,Система управления процессом перегрузки материала из уборочной сельскохозяйственной машины 1 в транспортное средство 2 при их независимом движении включает выгрузной рабочий орган 3, выполненный поворотным в горизонтальной плоскости, козырек 4, выполненный поворотным в вертикальной плоскости (фиг. 1 и 2), причем выгрузной рабочий орган 3 и козырек 4 оборудованы электроуправляемыми от блока ручного управления 5 гидромеханическими исполнительными механизмами 6 и 7, которые состоят из гидрораспределителей 8 и 9, гидроцилиндров 10 и 11, приводных механизмов 12 и 13 для перемещения соответственно выгрузного рабочего органа 3 и козырька 4.Выгрузной рабочий орган 3 и козырек 4 соединены кинематически посредством четырехзвенного шарнирного механизма 14 с фотоэлектрическим блоком 15, который соединен с управляющими устройствами 16 и 17, установленными в кабине уборочной сельскохозяйственной машины 1, выходы которых подключены к гидрораспределителям 8 и 9 (фиг. 3).На борт транспортного средства 2 нанесены краской вблизи его правого и левого краев две вертикальные яркостные контрастные метки 18 и 19, а на определенном расстоянии от верхней кромки борта нанесена одна горизонтальная метка 20. Для их освещения в ночное время на вы 5 1 О 15 20 25 30 35 40 45 50 55 60 65 грузном рабочем органе 3 установлены фары 21 и 22 (фиг. 1 и 2).Фотоэлектрический блок 15 имеет объектив 23, в фокальной плоскости которого расположены горизонтальный 24 и вертикальный 25 ряды фотоэлементов, причем фотоэлементы 26 - 29 горизонтального ряда 24 и фотоэлементы 30 - 33 вертикального ряда 25 соединены в целях компенсации изменения уровня естественной освещенности в мостовые схемы (фиг. 5). Порядок установки фотоэлементов 26 - 29 и 30 - 33 в фотоэлектрическом блоке 15 показан на фиг. 4.Работает устройство следующим образом.При подходе порожнего транспортного средства 2, когда середина его борта окажется напротив выгрузного рабочего органа 3, комбайнер вводит машину в гон, предварительно включив управление устройств 16 и 17, при этом с одного из двух выходов управляющего устройства 16 поступит сигнал к исполнительному механизму 6 и выгрузной рабочий орган 3 начнет перемещаться, например, по направлению движения часовой стрелки. А с одного из двух выходов управляющего устройства 17 поступит сигнал к исполнительному механизму 7 и козырек 4 также начнет перемещаться, например подниматься, и так как фотоэлектрический блок 15 связан посредством четырехзвенного шарнирного механизма 14 с выгрузным рабочим органом 3 и козырьком 4, то фотоэлектрический блок 15 придет в движение как в горизонтальной, так и в вертикальной плоскостях.Сигнал на выходе управляющего устройства 16, при котором выгрузной рабочий орган 3 перемещается по направлению движения часовой стрелки, сохраняется до тех пор, пока фотоэлементы 26 и 28 горизонтального ряда 24 не среагируют на яркостную контрастную метку 18, при этом на управляющее устройство 16 поступит сигнал ограничения шага перемещения выгрузного трубопровода в вышеуказанном направлении, а управляющий сигнал на исполнительный механизм 6 поступит с другого выход управляющего устройства 16, что приведет к изменению направления перемещения выгрузного рабочего органа 3. Сигнал на выходе управляющего устройства 16, а следовательно и перемещение выгрузного рабочего органа 3 против направления движения часовой стрелки, сохраняется, пока фотоэлементы 27 и 29 не среагируют на яркостную контрастную метку 19, при этом направление перемещения выгрузного, рабочего органа 3 вновь изменится на направление, противоположное предшествующему, и т. д,При перемещении в горизонтальной плоскости выгрузного рабочего органа 3 фотоэлементы 30, 32 и 31, 33 вертикального ряда 25 реагируют на горизонтальную яркостную контрастную метку 20, а сигналы от них служат для ограничения шагов перемещения козырька 4 соответственно при его подъеме и опускании. Поэтому, если первоначально заданный сигнал от управляюще го устройства 17 был на подъем козырька 4, то при реагировании на метку 20 фотоэлементов 31 и 33 управляющий сигнал не меняется, а при реагировании на метку 20 фотоэлементов 30 и 32 сигнал к исполнитель ному механизму 7 поступит с другого выхода управляющего устройства 17 и направление перемещения козырька 4, а вместе с ним и фотоэлектрического блока 15, изменится и сохранится до тех пор, пока от фо тоэлементов 31 и 33 не поступит к управляющему устройству 17 сигнал на ограничение шага перемещения козырька 4 при его опускании, Подъем козырька 4 сменится опусканием при реагировании на метку 20 20 фотоэлементов 30 и 32 и т. д.Таким образом, сигналы фотоэлементов горизонтального 24 и вертикального 25 рядов служат для бесконтактного ограничения шагов перемещений соответственно вы грузного рабочего органа 3 и козырька 4, при этом положение транспортного средства 2 отслеживается путем автоматической ориентации выгрузного рабочего органа 3 и козырька 4, по яркостным контактным ЗО меткам 18, 19 и 20 на борту транспортного средства 2. При отходе загруженного транспортного средства 2 комбайнер выключает управляющие устройства 16 и 17, а при подходе порожнего транспортного средства их 35 включает, и цикл повторяется. Таким образом, система управления процессом перегрузки материала из уборочной сельскохозяйственной машины в транспортное средство позволяет автоматизировать процесс перегрузки, снизить потери урожая, обеспечить равномерное заполнение транспортного средства, повысить производительность уборочной сельскохозяйственной машины.Формула изобретенияСистема управления процессом перегрузки материала из уборочной сельскохозяйственной машины в транспортное средство при их независимом движении, включающая выгрузкой рабочий орган с козырьком, фотоэлектрические датчики для обнаружения яркостных контрастных меток на борту транспортного средства, исполнительные и приводные механизмы, управляющие устройства, отличающаяся тем, что, с целью автоматизации процесса и уменьшения потерь материала при перегрузке, фотоэлементы объединены в фотоэлектрический блок, который кинематически связан с выгрузным рабочим органом и козырьком и посредством управляющих устройств - с исполнительными механизмами.Источники информации,принятые во внимание при экспертизе 1. Авторское свидетельство СССР Мо 505400, кл. А 01 Р 90/00, 1973.2. Патент ГДР Мо 109975, кл. А 01 В 69/00, 1974 (прототип),Техред А. Камыщник Изд.254 рственного комитета СССР 113035, Москва, Ж, РаушРедактор О, ИвановаЗаказ 63117 НПО сПоиск Госуда ова Ко Тираж 712 по делам изоб скан наб., д. 4/5 Типография, пр. Сапунова, 2 тор А. Галахова Подписное ений и открытий
СмотретьЗаявка
2771071, 28.05.1979
ЦЕНТРАЛЬНЫЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙИНСТИТУТ МЕХАНИЗАЦИИ И ЭЛЕКТРИФИКАЦИИСЕЛЬСКОГО ХОЗЯЙСТВА НЕЧЕРНОЗЕМНОЙ ЗОНЫСССР
НАГОРСКИЙ ИГОРЬ СТАНИСЛАВОВИЧ, БОДИЛОВСКИЙ ДМИТРИЙ ВАСИЛЬЕВИЧ
МПК / Метки
МПК: A01B 69/00
Метки: процессомперегрузки
Опубликовано: 07.04.1981
Код ссылки
<a href="https://patents.su/5-818515-sistema-upravleniya-processomperegruzki-materiala.html" target="_blank" rel="follow" title="База патентов СССР">Система управления процессомперегрузки материала</a>
Устройство для формирования сигнала перегрузки газотурбинного агрегата

Номер патента: 934062
Опубликовано: 07.06.1982
Авторы: Андрезен, Бобылев, Киселев, Маклюшин
МПК: F02C 9/28
Метки: агрегата, газотурбинного, перегрузки, сигнала, формирования
...направления вращения знак фазового сдвига меняется на противоположный, с выхода блока 12 обработки сигнала направления вращения сигнал поступает на исполнительный механизм 9, а также на входы первого сумматора 5.Первый сумматор суммирует сигналы, поступившие на его вход для направления "Вперед или "Назад", с сигналом частоты вращения вала турбины с блока 4 и выдает откорректированный по направлению вращения гребного винта выходной сигнал, пропорциональный частоте вра 1 цения турбины, на вход второго сумматора 10.Итак, напряжение, пропорциональное значению температуры наружного воздуха, с соответствующим знаком поступает на вход второго сумматора 10, на другой вход которого поступает напряжение, пропорциональное частоте вращения...
Устройство автоматической стабилизации угла наклона рабочего органа землеройных машин

Номер патента: 663795
Опубликовано: 25.05.1979
МПК: E02F 9/20
Метки: автоматической, землеройных, машин, наклона, органа, рабочего, стабилизации, угла
...уменьшения количества включений исполнительного механизма.Это достигается тем, что устройство снабжено узлом коммутации, например реле, и источником сигнала смещения, соединейным через контакты узла коммутации с входом усилителя- преобразователя, выход которого подключен к управляющему входу узла ком.мутации.На чертеже изображена принципиаль ная схема предлагаемого устройства.Устройство имеет объект стабилизации угла наклона элемента 1, датчик 2 угла наклона, каналы 3 и 4 усилителя-преобразователя, отрабатывающие 10 сигналы того или иного знака, выходные реле 5 и 6 каждого иэ каналов, обмотки 7, 8 соответствующих реле, силовые контакты 9, 10 реле, исполнительный механизм 11, контакты 12 и 13 реле для подачи сигнала смещейияна вход...
Устройство для имитации процесса переезда транспортного средства через дорожную неровность

Номер патента: 901881
Опубликовано: 30.01.1982
Автор: Панкратов
МПК: G01M 17/007
Метки: дорожную, имитации, неровность, переезда, процесса, средства, транспортного
...между собой. Испытываемоетранспортное средство 13 передними14 и задними 5 колесами устанавливается на испытательной дорожке.Устройство работает следуюшим образом.прц наезде колеса 14 на площадку(фиг, 1), выступающей над испытательной дорожкой на высоту 1,1опорная площадка под действием нагрузки от массы транспортного средства, передаваемой через переднее колесо,поворачивается против часовой стрелки, перемещая вниз поршень гидроцилиндра 4 и повышая давление в полости 9, В результате жидкость из полости 9 через параллельно соединенныеклапан 11 и дроссель 12 поступает вполость 10 аккумулятора б, Ввиду того, что клапан 1 оказывает в прямомнаправлении значительно меньшее сопротивление движению жидкости, чемдроссель 12, большая часть...
Устройство для поддержания глубины хода рабочих органов сельскохозяйственных машинiigt; amp; n “гзргят h h: 4is-isrp i•-• у; j, 4 у • 5 и s la «

Номер патента: 438377
Опубликовано: 05.08.1974
Автор: Изобретени
МПК: A01B 63/00
Метки: 4is-isrp, i••, гзргят, глубины, машинiigt, органов, поддержания, рабочих, сельскохозяйственных, хода
...с торцовыми полостями распределителя 10 для управления перемещением плунжера этого распределителя.Для предохранения гидросистемы от перегрузки между распределителем 10 и регулятором 4 установлен предохранительный клапан 18.Устройство работает следующим образом.При автоматическом управлении масло от гидросистемы трактора поступает в распределитель 10 по каналу 14, при этом рукоятка распределителя трактора должна находиться в положении опускание принудительное.Давлением потока масла, осуществляемым через внутренний канал 16, плунжер распределителя 10 переводится в крайнее левое положение.Поток масла через канал 6 попадает в регулятор 4.Если копирующий полоз 1 находится в заданном положении, то масло через канал 7, распределитель 10 и...
Отопительное устройство для транспортного средства

Номер патента: 740540
Опубликовано: 15.06.1980
Авторы: Прокопов, Расторгуев, Шарафутдинов
МПК: B60H 1/18
Метки: отопительное, средства, транспортного
...заборным патрубком 18. В межтрубное пространство теплообменника между опорами 6 и 7, например 4, через заправочную горловину, (на фиг, не показана) заливается жидкий тепло- носитель, например трансформаторное масло.При работе отопительного устройства 4 горячие выхлопные газы двигателя внутреннего сгорания по выхлопной трубе 1 подаются в теплообменник, где газы под опорой 4 распределяются по пучку газовых труб 5, из которых. выходят над50 опорой 3 и по выхлопному патрубку 9 выбрасываются в атмосферу. Одновремен- но работает вентилятор 11, который через заборный патрубок 18 забирает воздух и просасывает его через полость В между кожухом 16 и воздуховодом 12 и через полость Б между кожухом 15 и корпусом 2 теплообменника в свою...
Предыдущий патент: Гидравлическая система трактора
Следующий патент: Гидроавтомат управления маркерами
Случайный патент: Трехфазный демодулятор