Способ регулирования силовых электрогидравлических следящих приводов и устройство для его осуществления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 705418
Авторы: Векшин, Илюхин, Казмиренко, Лобачев, Меркушев, Письменный, Прокофьева

Текст
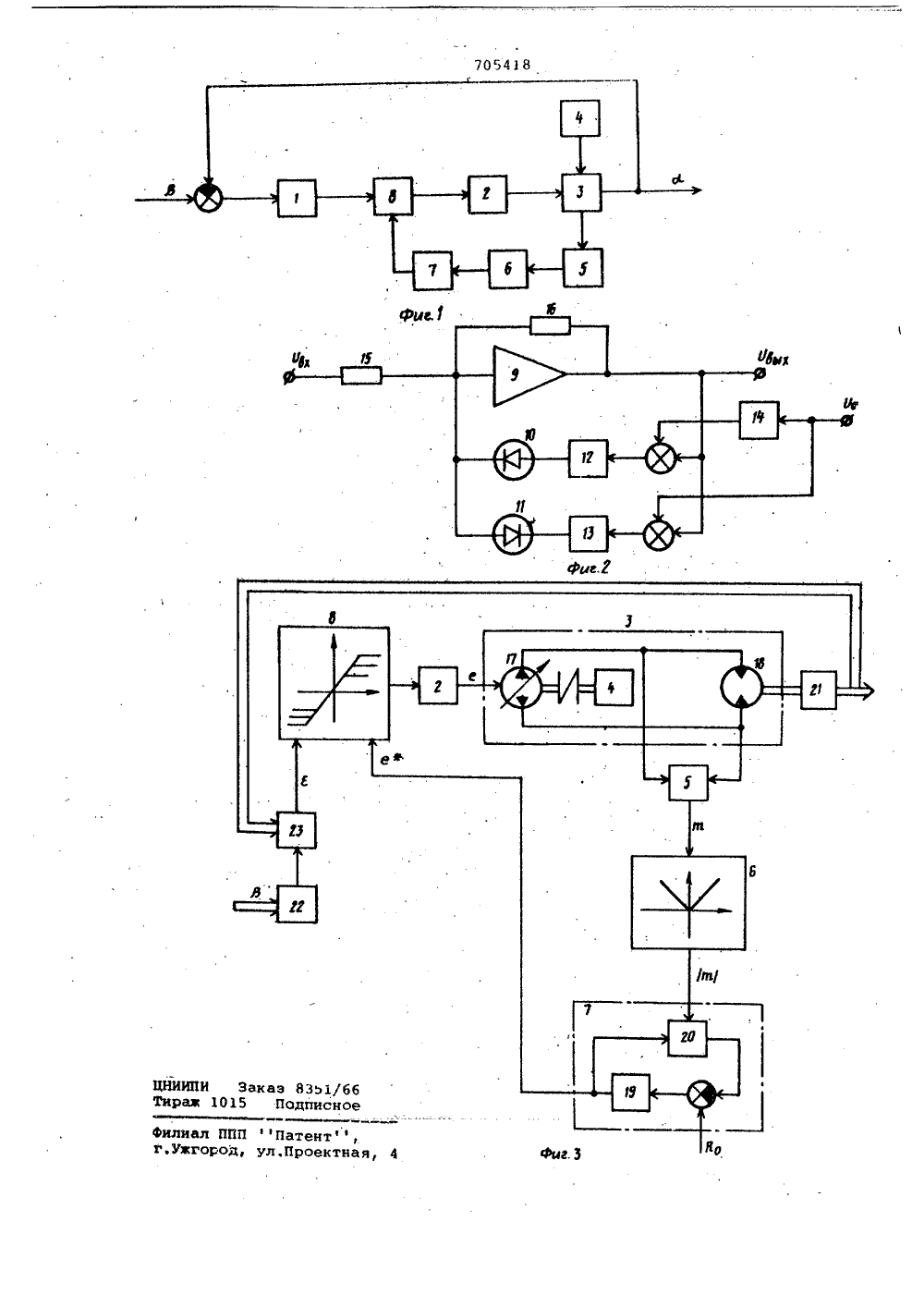
ОПИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз Советских Социалистических Республик(22) Заявлено 050875 (2 ) 2162857/18-24с присоединением заявки йо(23) Приоритет а 05 В 11/Зб Государственный комитет СССР ио делам изобретений и открытий(71) Заявитель московский ордена Ленина и ордена Трудового красного Знамени высшее техническое училище -имени Н.Э.Баумана(54) СПОСОБ И УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯСИЛОВЫХ ЭЛЕКТРОГИДРАВЛИЧЕСКИХ СЛЕДЯЩИХ ПРИВОДОВ Изобретение относится к области силовых следящих объемных приводов ,(СП) широкого назначения, например машиностроительного, которые получают энергию от автономных источников энергии, ограниченной мощности.Преимущественная область использования предлагаемого изобретеиия - силовые СП, работающие от приводных двигателей (ПД) ограниченной мощности в конструкциях с жесткими требованиями к весу и габаритам системы.Примером применения могут служить системы гидропроводов промышленных роботов или объемные гидроприйоды 15 большой мощности, управляющие положением различных объектов регулирования, установленных на автономных транспортных устройствах с системами электрического питания ограниченной 20 мощности и общим приводным двитателем.Известны системы автоматического управления, в которых логическое устройство формирует корректирую щий сигнал в те интервалы времени, когда не совпадают знаки скорости и входного сигнала двигателя. Логическое устройство затем сдвигает этот сигнал на некоторый промежуток вре мени и отключает сигнал ошибки при-вода. В данной системе не формируется и не используется сигнал моментасиловой части и отсутствует предельный сигнал, что не позволяет реализовать замену входного сигнала на предельный, Хотя в системе и реализуется операция замены сигналов, но эта замена осуществляется на нулевой сигнал, а не на предельный, который может иметь и ненулевые значения, и замена сигналов происходит не в те моменты времени, когда входной сигнал превышает по модулю предельный сигнал (1).Известныеспособы построения силовых СП основаны на применении источников энергии, мощность которых выбирается в соответствии с ее максимальным, возможным в переходном или установившемся процессе,. значением.При этом не учитйвают ряд особенностей работы мощных объемных СП с различного рода приводными двигателями (газотурбинными двигателями внутреннего сгорания или комбинированными источниками энергии) существенно ограниченной мощности. Эти особенности заключаются в том, что в процессе эксплуатации систем, в зави7054 18 3 4гсимости от выбранного режима работы, ствительный сигнал управления силовой.обычно цеобходимо получение либо мак- частью на предельный при условии чтоУсимальнойвозможности скоростииспол- первый из указанных сигналов превышанительйого- устройства при действии ет второй по модулю.неэйачительных развиваемых моментов Обычно. устройство для Формированиянагрузки, либо максимального момента 5 сигнала управления силовой частьюйагрузкк при скоростях, близких к измерения ее момента содерЖит опе-,нулевому значению. При этом Привод" . Рационный усилитель с диодным ограной двигатель, позволяющий лолучить ничителем типа ффнасыщениеф, соеуказанные режймы работы силового СП, диненный с механизмом управления,может иметВ уровень мощностизначи- О который подключен к гидроприводу стельно меньше предельно возможного ; установленным на выходе датчиком давзначения и скорости слежения. Од- ления, и приводной двигатель насоса,нако эта особенность силовых СП не : гидропривода 23,может быть использована без реалиэа- Для реализации предложенного спо;цик специальных способов ограничения 5 фоба описанное устройство дополнительмощности реакции СП и ПД. При жест , . но содержит умножитель, усилители икиЗ требованиях к габаритам и весу .мостовой диодный выпрямитель, к однойконструкцийприменение менее мощных ., " из диагоналей которого подключен даты более экономичных ПД при перегруз-чик давления, а другая диагональ соеке ведет к воэможности появлейия Фун- дийена со входом умножителя, охваченкциональиых отказов систеьи силового О кого отрицательной обратной связью,СП (в, случае использования гаэотур-с первым усилителем, подключенным кбиикого ЮКГателя В качестве привод- каналу. сигнала уровня ограничения мойого сгорание рабочих лопаток при по мента приводного двигателя, причем.нижении скорости под нагрузкой; пере выход первого усилителя через второйход на неустойчивый режим .работы в 5 и третий усилители подключен к диодасинхронных ПД и т. д. ) . ному. ограничителю типа фнасыщениеф,Наиболее близким к изобретениюПоложительный .эффект достигается:техническимрешением являетсясповведением в схему силового сп нелиней.соб РегУлйРования силовых электрогид- ной обратной связи и взаимодействуюравлических следящих приборов путем 30 щего с ней управляющего устройства вформирований сигнала управления сило- прямой цепи СП, корректирующих сиг вой "частью кизмерения"мбмента"бкло-нал управления гкдроприводом в эавивой части. Этот способ относится к сис- симости от развиваемого момента на вытемам, работающим от приводного дви- ходе системы, Эффект ограничения мо гателя и характеризуется гидромехани мента реакции силовой части на прической линейкой обратной связи по мо- водной двигатель достигается за счетменту"гкуопривода, уменьшающей значе- автоматического вычисления допустимонкеугла ограничения поворота люльки .го входного сигнала силовой частинасоса, что ограничивает расход рабо-, гкдропривода, который формируют в зачей жидкостИ 2).4 О вискмостк от требуемого уровня огра. Однако данный способ обладает ря-: ниченкя и который пропорционален обцом недостатков,в том,4 исле сложностью ратной величине модуля момента, разего реализации прй раз 1 аботке совре- . виваемого гидродвкгателем. В соотиЕнных силовых гидравлических СП в.ветствии с этими автоматически устарежиме высоких давлений (до 320 атм),45 навливается желаемый уровень ограникеточйостью стабилизации мощности к чения сигнала на входе механизмаотсутствием возможности регулирова- управления гидроприводом.ния У 1 Овня Огранкчейия мощностй в. , Сущностьспособа РЕгулирования пойроцеСсе работы, невозможностью при- ясняется чертежами.менения в СП с другим типом его си-На фиг. 1 пРедставлена реализующаяловой части. разработанный. способ регулирования. Цель настоящего изобретейия состо- . схема силового СЙ; на Фиг. 2 - фрагктв ковцшении точности к надежности мент схемы устройства с операционнымреГулирования путем разработки спосо- усилителем; иа.фиг. 3 - полная схемабе коррекции, позволяющего существен- устройства.10 ограничить мощность, потребляемую 55 структурная схема, реализующаят приводного-.двигателя. "" - -способ, содержит усилительное устройПоставленная цель достигается тем, ство 1, механизмуправления 2 гидрочто формируют Сигнал, проПорпионаЛь- привОДа Объемного регулирования 3,;,ный модулю измеренного момента скло- приводйой двигатель 4, датчик давлевой части, вычисляют предельную ве ния 5, мостовой диодный выпрямительличину сигнала управления силовой час 6 умножитель 7, диодный ограничителтью о сигналу уровня ограничения мо- типа насыщение 8. На Фигурах такмейта йркводного двигателя й сигналу, же показаны: операционный усилительпропорциональному модулю измеренного 9, диоды 10 и 11, усилители 12, 13момента силовой части, и заменяют дей-б 5 и 14, резисторы 15 и 16 (Фиг. 2); на77 1ф 7777 77 ,п 7 7054 18 сос 17, гидродвигатель 18, блоки 19и 20 умножителя, редуктор 21, датчики положения 22 и 23.Способ регулирования включаетвсебя следующие операции: измерениемомента в силовой части датчиком давпения 5; формирование в элементе бсигнала, пропорционального модулю всилового момента, развиваемого силовой частью; вычисление элементом 7 ,предельной величины сигнала управления силовой частью е как частногоот деления сигнала уровня моментасиловой части реакции на приводнойцвигатель Во на модель момента (приформировании) путем замены сигналас помощью элемента 8 и механизмауправления 2 на входе силовой частисигнала ф при условии, что действительная величина сигнала управлениясиловой частью превышает предельную,.то есть при е )е, и сигнала е приневыполнении этого условия,то естьпри е .с е.Прн действии на входе силовой части ГП сигнала е выполняется гранич-ное условие отсутствия перегрузкиприводного двигателя 4 по моменту реакции В- Во, причем непрерывное выполнение условия ее гарантирует ограничение мощности, потребляема, 30мой гидроприводом )б,.пмПредлагаемый способ регулирования,с целью повышения Функциональной надежности и упрощения настройки привода,реализуется при вклниении в цепь 35ошибки СП в качестве элемента 8 передмеханизмом управления 2 операцйо 7 ннОго усилителя с ограничением типанасыщения, уровень которого автоматически изменяется пропорционально 4 Определьной величине сигнала управления силовой частью. Эта величина вычисляется элементами корректирующейобратной связи, состоящей иэ последовательно соединенных устройств, 45Формирующего модуль сигнала датчикадавления, и умножителя, Сигнал дат"чика давления дает информацию о моменте СП, а выходной сигнал умиожителй6 бедставляет собфй частное от деления постоянного по величине сигнала,пропорционального сигйалу уровнй ограничения момента силовой части реакции СП, на сигнал, пропорциональныймодулю момента силовой части. Эффек"тивность регулирования будет более 55высокой при большем по сравнению ссиловой частью быстродействии механизма управления.принципиальным является то, чтоучитываетоя взаимодействие гидроцривода с источником энергии и ограничивается не момент силовой части в, амомент на валу приводного двигателяВ. Моментсиловой части определяетсянагрузкой гидропрнвода. В режиМе65 ограничения момента приводного двигателя изменяется положение регулирующего органа насосапо закону:Во)вгде В о - уровень ограничения моментаприводного двигателя;е - предельное значениеугла по.ворота регулирующего органа,В силу этого момент на валу приводного двигателя В = ею оказывается ограниченныж: В,Е,С Е 777 7771 вчто и позволяет исключИть перегрузкиисточника энергии (приводного двигателя) и обеспечить достижение поставленной цели.В предлагаемом устройстве эффектограничения момента реакции достигается (фиг, 2) при охвате части элемента,8 по фиг.1 обратной связью,содержащей.операционный усилитель 9 с обратнойсвязью, состоящей из двух диодов 10и 11 и трех усилителей 12, 13 и 14Такая обратная связь является извест-..ным диодным ограничителем выходногосигнала операциойного усилителя, Особенность ограничителя заключается вналичии дополнительных усилителей,два из которых - 12 и 13 - являютсй .суммирующими буферами,а третий - 14 -инвертирующим, Общая точка усилителя9 и встречно включенных диодов 10 и11 подключена к суммирующей точке,апротивоположные точки диодов подключены к выходам усилителей 12 и 13,Навходы этих усилителей подается выходной сигнал операционного усилителя 0 ВьВ и опорное напряжение 0,соот;ветствующее сигналу уровня ограниче.ния КО.На один из буферных усилителейопорное напряжение 0 подается. черезусилитель 12.Полярность олооного.напряжения такова, что при отсутствиисигнала 0 ВЫдиоды заперты. Обратныесвязи, охватывающие через диодыоперационный усилитель, являютсяотрицательными. Это достигается, вчастности, при использовании усили-телей" 12 и 13, не изменяющих Фазувходного сигнала, например эмиттерных повторителей.Если выходное напряжение 0 Вы меньше опорного напряжения 0 о по модулю,то диоды заперты, и операционный усилитель имеет коэффициент передачи,определяемый величинами сопротивлений резисторов 15 и 16, стоящих навходе и в обратной связи. Когда подвлияниемвозрастающего входного напряжения, напряжение на выходе достигаетабсолютной величины значения опорногонапряжения, один,из диодов будет открытым, а коэффициент передачи усилителя резкО уменьшается. В этом случае, с достаточной для практики точностью, выходное напряжение можно7054 18 Формула изобретения 10 й величину сигнала управления силовой частью по сигналу уровня ограничения момента приводного двигателя и сигналу,пропорциональному модулю измеренного момента силовой части,и заменяют действительный сигнал управления силовой частью на предельный ври условии,что первый из указанных сигналов превышает второй по модулю.2. Устройства для реализации способа по п. 1, содержащее операцион 30 ный усилитель с диодным ограничителем типа 1 насыщение, соединенный с механизмом управления, который :.подключен к гидроприводу с установленным на выходе датчиком давления, и 35 и приводной двигатель насоса гидропривода, о т л и ч а ю щ и й с я тем, .что, с целью повышения точности и надежности устройства, оно со,держит умножитель,усилителй и мостовой диодный выпрямитель,к одной из б диагоналей которого подключен датчикдавления,а другая диагональ соединена е, со входом умножителя, охваченногб отрицательной обратной связью с пер 45 вым усилителем, подключенным к каналу сигнала уровня ограничения момен" та приводного двигателя, причем выход первого усилителя через второй и третий усилители подключен к диод- ному ограничителю типа насыщение ечитать постоянным и равным опорному напряжению. Формируемое корректирующей обратной связью привода переменное опорное напряжение, благодаря наличию буферных усилителей, дийамически изменяет уровень ограничения выходного сигнала усилительного .устройства. Полученный таким образом ограничитель в цепи ошибки привода позволяет структурно изобразить усилительное-устройство СП в виде Формирующего элемента, показанного на Фиг. 3. Функциональная схема устро ства реализации предложенного способа регулирования, изображенная на Фиг. 3, содержит: механизм управления 2, силовую часть гидропривода объемного регулирования 3, включающего в себя насос 17 и гидродвигатель )8, приводной двигатель 4, датчик давления 5, формирующий модуль элемент б, умножитель 7, включающий в себя блок 19 и 20, элемент 8, редуктор 21, дающий и принимающий датчики положения 22 и 23, выделяющие ошибку СП Е, й - сигнал,. несущий информацию об уровне ограничения" момента реакции ГП на ПД, и Ь и с(. - углы поворота входного и выходного валов приВода сбответственно.Принцип действия данного устройства соответствует описанию порядка действий в предлагаемом способе ограничеййя мощности приводного двигателя"в системе ЭГСП.Предлагаемый способ и устройство, его реализующее, получили проверку пр пбмощи моделирования на АВМ. Характе рен результат проверки в наиболее тяжелом режиме отработки ступенчатого входного сигнала большой величины обратной связи. Применение данного способа позволяет ограничивать потре ление. мощности приводного двигателя в системе ЭГСП на определенном уровн Ошибки системы, вызванные наиболеетяжелйм для системы ступенчатым воздействием входного сигнала,кратковремеййы и обусловлены инертностьюмеханизма управления.Использование новогб способа - отраничения мощности приводного двигателя в системе ЭГСП - выгодно отличает предлагаемый силовой СП отизвестных решений, так как позволяет существенно ограйичить мощность,потребляемую от приводного двигателя ограниченной мощности и,.такимЬбразом, исключает возможность ФункМконального отказа системы.Использование новых структурныхэлементов к корректирующей цепи позволит значительно повысить функциональную надежность силового СП безприменения силовых.,стабилизаторов,и различного рода силовых преобразователей энергии, увеличивающих веси габариты системы, что в свою очередь увеличивает сферу примененияЭГСП, конструкции которых будут более надежны и экономичны. 1. Способ регулирования силовых электрогидравлических следящих приводов путем формирования сигнала управления силовой частью и измерения момента силовой части, о т л и ч а ю щ и й с я тем, что, с целью повышения точности и надежности регулирования, формируют сигнал, пропорциональный модулю измеренного моментасиловой части, вычисляют предельную Источники информации,принятые во внимание при экспертизе1. Сб. фНелинейные корректирующие устройства в системах автомати 55 ческого управленияф, Под, ред, проФессора Ю.И. Топчиева, М.,"Машиностроение", 1971, с 18.2. Кулагин А.В., Денисов Ю.С.и др. Основы теории и конструирования60 объемных гидропередач. м"Высшаяшкола", 1968, с. 34, рис. 111,2
СмотретьЗаявка
2162857, 05.08.1975
МОСКОВСКОЕ ОРДЕНА ЛЕНИНА И ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ВЫСШЕЕ ТЕХНИЧЕСКОЕ УЧИЛИЩЕ ИМ. Н. Э. БАУМАНА
ВЕКШИН СЕРГЕЙ ГЛЕБОВИЧ, ИЛЮХИН ЮРИЙ ВЛАДИМИРОВИЧ, КАЗМИРЕНКО ВЯЧЕСЛАВ ФЕДОРОВИЧ, ЛОБАЧЕВ ВЯЧЕСЛАВ ИВАНОВИЧ, МЕРКУШЕВ АЛЕКСАНДР РОДИОНОВИЧ, ПИСЬМЕННЫЙ ГЕОРГИЙ ВАЛЕНТИНОВИЧ, ПРОКОФЬЕВА ИЛОНА ВЛАДИМИРОВНА
МПК / Метки
МПК: G05B 11/36
Метки: приводов, силовых, следящих, электрогидравлических
Опубликовано: 25.12.1979
Код ссылки
<a href="https://patents.su/5-705418-sposob-regulirovaniya-silovykh-ehlektrogidravlicheskikh-sledyashhikh-privodov-i-ustrojjstvo-dlya-ego-osushhestvleniya.html" target="_blank" rel="follow" title="База патентов СССР">Способ регулирования силовых электрогидравлических следящих приводов и устройство для его осуществления</a>
Пусковое приспособление с перемещающейся по оси сцепной частью для двигателей внутреннего горения

Номер патента: 4527
Опубликовано: 31.08.1928
Автор: Маркус
МПК: F02N 1/02, F02N 15/04
Метки: внутреннего, горения, двигателей, оси, перемещающейся, пусковое, сцепной, частью
...16 и выступающей из крышки 1 а коробки 1,Колпак 39 содержит приспособление, защищающее вал ручного привода от действия отдачи со стороны двигателя, На валу ручного привода закреплена при помощи, чеки 43 а полая трубка 43, по кото- , рой скользит сцепная муфта 44,конец которой с фланцем снабжен зубьями 45, скошенными в одну сторону и сцепляющимися с зубья-ми 46 неподвижной плиты 47, прикрепленной при помощи винтов 48, к коробке 33. Обычно подвижнаясцепная муфта 44 прижимается пружиною 49 к плите, так что зубья муфты сцепляются с зубьями плиты; пружина упирается, с одной, стороны, во фланец муфты и, с другой стороны, - в шайбу 50, уста-новленную вблизи конца колпака.Пуск в ход производится всегда , в одном и том же направлении независимо...
Устройство для измерения моментов кручения приводных пружин фотозатворов

Номер патента: 292085
Опубликовано: 01.01.1971
МПК: G01L 5/26
Метки: кручения, моментов, приводных, пружин, фотозатворов
...корпус 1 с закрепленными на нем угломерной шкалой 2, упором 3 для одного конца контролируемой пружины 4 и подпружиненным фиксатором 5 и вертикальный вал б, установленный в корпусе на подшипниках качения 7, несущий на верхнем конце сменные нагрузочные диски 8 и указательную стрелку 9, а на нижнем - упор 10 для второго конца контролируемой пружины.Шкала снабжена двумя электрическими контактами 11 и 12, устанавливаемыми на фиксированном угловом расстоянии один от другого. Указательная стрелка несет подвижный электрический контакт 13, взаимодействующий с контактами 11 и 12 шкалы. Все три контакта включены в цепь управления электронным измерителем времени 14, регистрирующим время раскручивания контролируемой пружины на заданный...
Ограничитель хода электрического двигателя подъемного механизма в крановых устройствах

Номер патента: 8678
Опубликовано: 30.03.1929
Автор: Емцов
МПК: B66C 13/22, B66C 15/00, H02P 3/06
Метки: двигателя, крановых, механизма, ограничитель, подъемного, устройствах, хода, электрического
...ток в направлении подъема до обратного включения переключателя С, переключатель В снова встанет в свое нижнее положение и разомкнет путь у г к якорю электродвигателя. Предмет патента. Предлагаемое изобретение касается ограничителя хода электрического двигателя подъемного механизма в крановых устройствах, снабженных предельными выключателями и дифференциальным реле, служащим, при перемене направления хода двигателя, для замыкания накоротко контактов якорной цепи двигателя, размыкаемых предельным выключате-лем.На чертеже дана схема соединения для предлагаемого автоматического выключателя, при чем обмотки дифференциального реле питаются главным током. Цепь тока при подъеме: обмотка возбуждения а Ь, первая обмотка дифференциального реле...
Устройство для измерения статического момента двигателя постоянного тока

Номер патента: 958990
Опубликовано: 15.09.1982
Авторы: Малышко, Никишин, Орлов, Первунинский
МПК: G01R 31/34
Метки: двигателя, момента, постоянного, статического
...практически безинерционными устройствами, то датчик скорости (обычно тахогенератор) в канале измерения ускорения имеет постоянную времени в несколько миллисекунд, и это уже определяетсдвиг фаэ сигналов. Фильтры, включенные в каналы измерения, также вносятразличиев величину фаэонцх сдвиговвследстаие различия их частотныххарактеристик.Обычные фильтры низкой частоты(без запоминающего устройства) позволяют регулировать задержку сигнала,но при этомменяются и характеристики фильтра (коэффициент передачи,форма частотйай характеристики и т.д.)10поэтому при наличии трех каналов из. мерения, получающим информацию отнезависимым (н различным по своимсвойствам) датчиков, практическинеаозможно настроить фильтры так, , 15чтобы они обладали требуемыми...
Устройство для демпфирования системы приводной двигатель механизм

Номер патента: 1713069
Опубликовано: 15.02.1992
Автор: Быков
МПК: H02P 5/06
Метки: двигатель, демпфирования, механизм, приводной, системы
...двигателем и механизмом.Цель изобретения - повышение надежности,На чертеже представлена схема устройства,устройство содержит демпфирующую электрическую машину 1, соединенную через управляемый преобразователь 2 с электрической сетью 3. К управляющему входу преобразователя 2 подключен выход системы 4 управления, первый вход которой соединен с выходом последовательной цепью, состоящей из датчика 5 колебаний, фазовращателя 6 и усилителя 7, а второй - с выходом источника 8 опорного напряжения. Привод содержит приводной двигатель 9, соединенный упругой механической связью 10 с механизмом 11, Датчик 5 колебаний соединен супругой механической связью 10 или с приводным двигателем 9 или механизмом 11.Преобразователь 2 представляет собой...
Предыдущий патент: Система управления
Следующий патент: Пневматическое устройство централизованного каскадного управления
Случайный патент: Фальцовочная машина с четырьмя фальцующими аппаратами для многократного фальцевания