Способ определения рельефа и уровня поверхности материалов
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
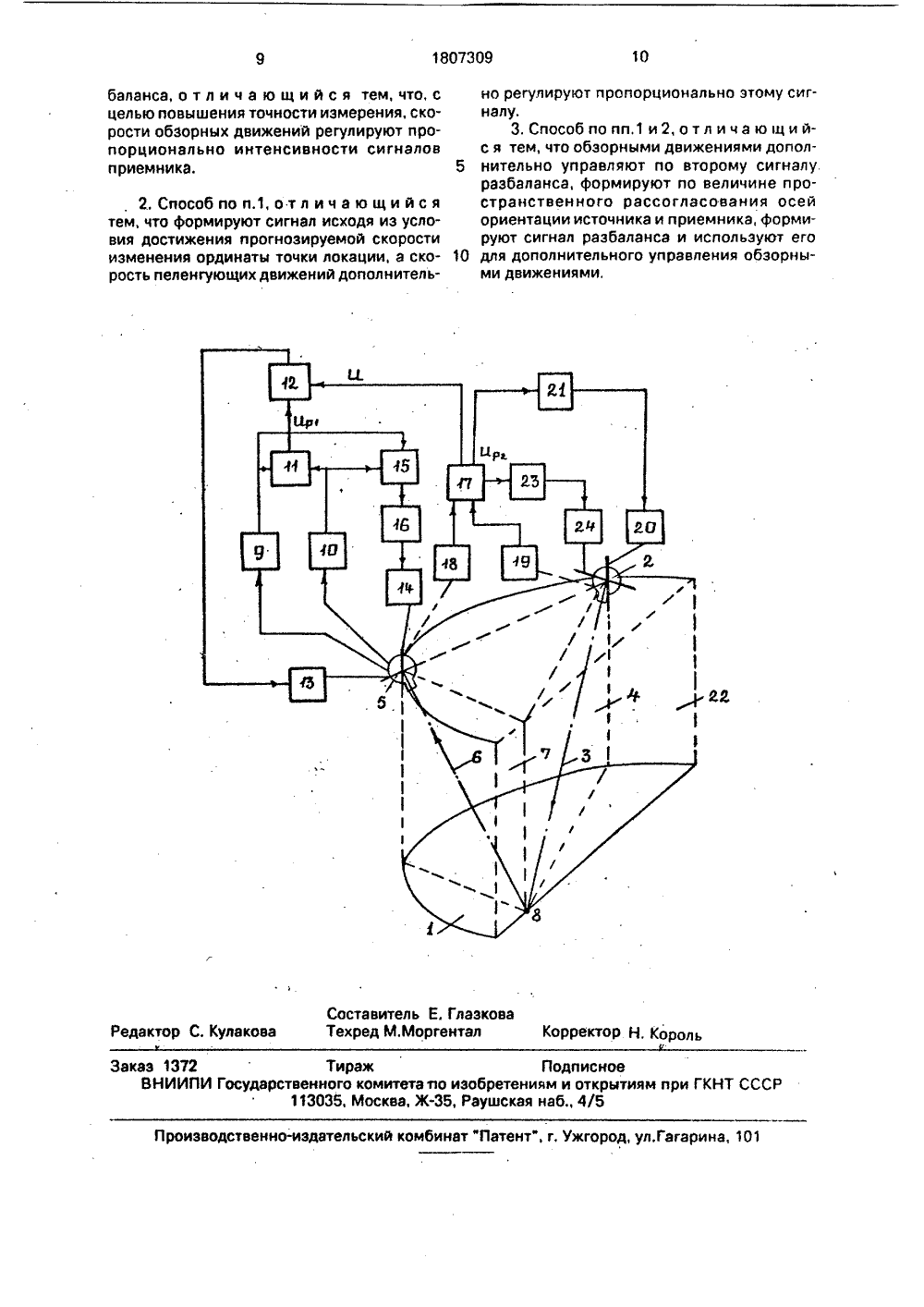
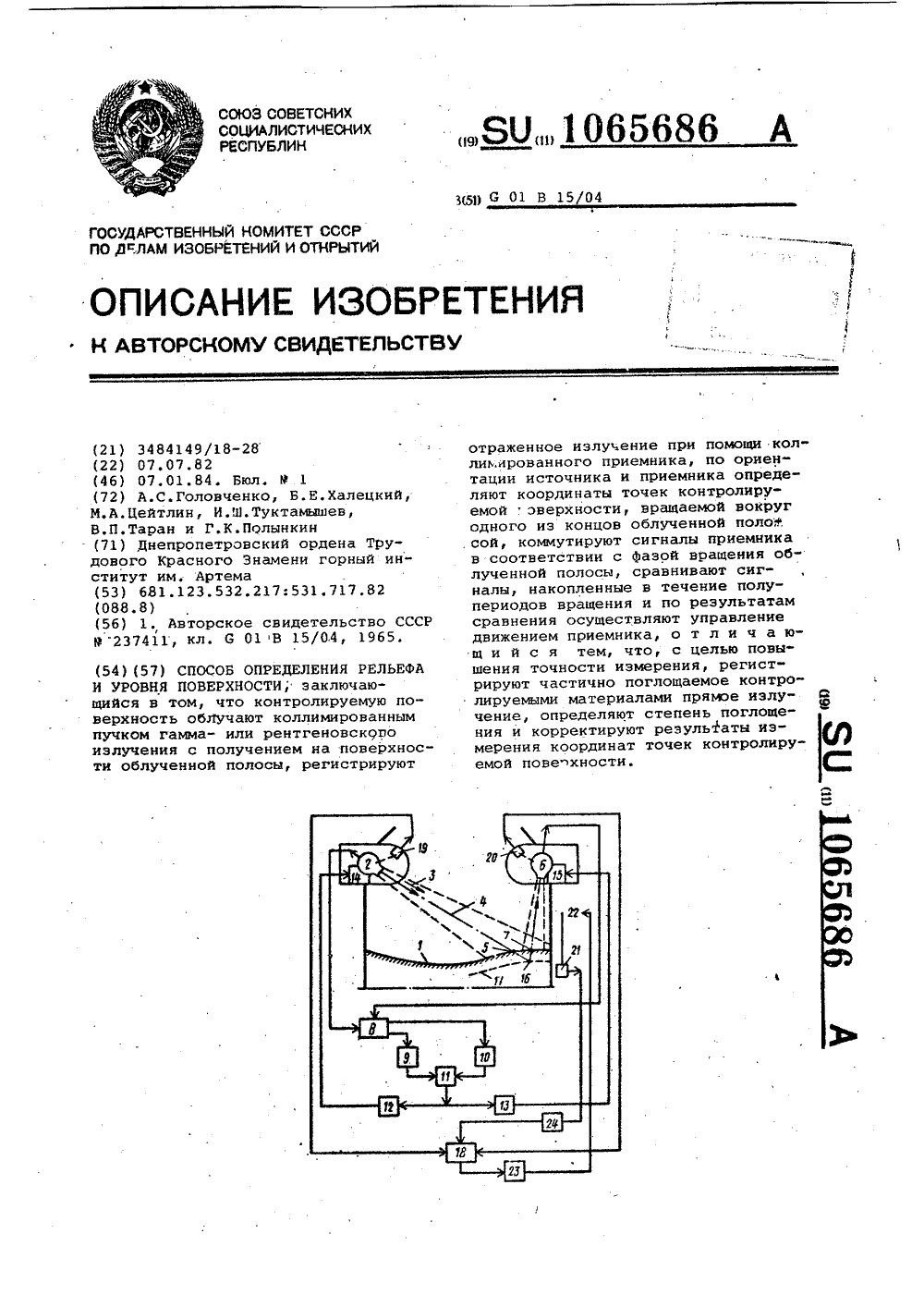
)5 6 01 В 15/О И РЕТЕ И У СВИДЕТЕЛЬСТ К АВТОР нтрольно- ТИ, К СПО- и уровня щью ионить испольи уровняов на коние относится к к й технике, в частн рения рельефа материалов с помо учения и может б ределения рельеф шихтовых матери нной печи, бретения - повыш ие точн е изображена схема, уемую поверхностм из блока 2 источым пучком иониз осущест 1 облучаника кол- рующего ГОСУДАРСТВЕН ЮЕ ПАТЕНТНОЕВЕДОМСТВО СССР(54) СПОСОБ ОПРЕДЕЛЕНИЯ РЕЛЬЕФА ИУРОВНЯ ПОВЕРХНОСТИ МАТЕРИАЛОВ(57) Изобретение относится к контрольноизмерительной технике, в частности к способам измерения рельефа и уровняповерхности материалов с помощью ионизирующихизлучений и может быть использовано для определения рельефа и уровняповерхности шихтовых материалов на колошнике доменнойпечи Целью изобретеИзобрете ивмерительно собам изме поверхности зирующих изл зовано для Оп поверхности лошнике доме Цель изо сти измерени На чертеж вления способ Контроли ют выходящи лимированнЖ(1, 1807309 А 1 2ния является повышение точности измерения, Эта цель достигается тем, что в извест:ном способе определения рельефа и уровняматериалов, заключающемся в том, что контролируемую поверхность облучают коллимйрованными пучками ионизирующего излучения, регистрируют отраженное излучение при помощи коллимированного приемника, осуществляют обзорные и пеленгующие движения источника и приемника и определяют координаты точки локации по ориентации источника и приемника, причем пеленгирующими движениями управляют по сигналу разбаланса, формируемому путем распознавания сигналов приемника, скорость обзорных движений регулируют пропорционально интенсивности сигналов приемника, обзорными движениями дополнительно управляют по второму сигналу раэбаланса, формируемому по величине пространственного рассог- Я ласования осей ориентации источника и приемника. 1 ил. излучения, ось 3 которого является осью ориентации блока 2 источника, причем указанный пучок излучения формируют вытянутым в вертикальной плоскости 4, проходящей через центр блока 2 источника и ось 3 ориентации блока 2 источника (на чертеже контролируемая поверхность 1 для простоты изображена в виде горизонтальной плоскости), При этом на контролируемой поверхности образуется облученная зона, вытянутая в направлении блока 2 источника,Рассеянное излучение регистрируют двумя детекторами коллимированного блока приемника 5, в который попадает излучение.с двух ограниченных приемных полшп=Ор 1 К 12 К 1 з Одновременно с пеленгующими движениями осуществляют обзорные движения 45 блока 5 приемника относительно его вертикальной оси вращения с помощью сервоп.ривода 14 для обеспечения перемещения точки 8 локации вблизи контролируемой поверхности в заранее выбранном на правлении, например, в направлении удлинения облученной зоны (в направлении облученной полосы), причем скорость этих движений регулируют пропорционально интенсивности сигналов блока 5 приемника с 55 помощью суммирующего блока 15, в котором суммируют накопленные в накопителях 9 и 1 О сигналы приемника с получением сигнала на выходе, пропорционального интенсивности сигналов блока 5 приемника, и узок, имеющих общую границу, через центр которой (центр приемной зоны) проходит ось 6 ориентации блока 5 приемника, причем оси ориентации каждого детектора блока 5 приемника располагают в вертикальной плоскости 7, проходящей через центр блока 5 приемника и ось 6 ориентации блока 5 приемника, примерно симметрично относительно оси 6 (на чертеже оси ориентации детекторов не показаны). При этом ось 6 10 ориентации блока 5 приемника пересекается с плоскостью 4 первичного излучения блока 2 источника в точке 8 локации. Сигналы блока 5 приемника накапливают в накопителях 9 и 10, после накопления сравнивают 15 их в блоке 11 сравнения, в результате чего на выходе блока 11 сравнения получают основной сигнал раэбаланса Ор, характеризующий взаимно расположение центров облученной и приемной зон в плоскости 7, 20 т,е. погрешность измерения. В соответсте чи с величиной и полярностью сигнала разбаланса Ор управляют пеленгующими движениями блока 5 приемника с помощью блока управления 12 и сервопривода 13, 25 обеспечивающего соответствующий поворот блока 5 приемника в плоскости 7 относительно горизонтальной оси вращения блока 5, перпендикулярной плоскости 7, до исчезновения до нулевого значения) сигна ла разбаланса, т.е, до совмещения центров облученной и приемной зон в плоскости 7, когда точка 8 локации практически совмещена с контролируемой поверхностью 1, При этом угловая скорость указанных пеленгую щих движений определяется сигналом разбаланса Ор, коэффициентом передачи (усиления) блока 12 управления К 12 и коэффициентом передачи К 1 з сервопривода 13 в соответствии с формулой 40 блока 16 управления. При таком регулировании скорости обзорных движений блока 5приемника происходит автоматическое ог- .раничение возможного роста динамическойпогрешности, обусловленного уменьшением интенсивности отраженного полезногосигнала по разным причинам, например,при удалении контролируемого участка поверхности от блоков источника и приемникаили естественного снижения активности излучателя блока 2 источника с течением,времени, а также реализуется возможностьавтоматического снижения времени измерения без снижения точности измерения .при увеличении интенсивности отраженного сигнала,Координаты точки 8 локации определяют с помощью вычислительного устройства17, связанного с датчиками 18 и 19 ориентации источника и приемника.С целью дальнейшего повышения точности измерения, а также снижения времени измерения и активности излучателяблока 2 источника скорость пеленгующихдвижений блока 5 приемника дополнительно регулируют с помощью блока 12управления пропорционально сигналу Оформируемому вычислительным устройством 17, исходя из условия достижения скорости изменения во времени ординаты уточки 8 локации прогноэируемой скоростиизменения этой ординаты, т.е, исходя изусловия:у =Ч, (2)где у - скорость изменения ординаты точки8 локации (производная), обеспечиваемая спомощью вычислительного устройства 17,блока 12 управления и сервопривода 13 сучетом положения осей ориентации блоковисточника и приемника и динамики изменения этого положения;Чу= Лу/Л 1 - прогнозируемая скоростьизменения ординатц точки 8 локации;Ьу=у-у - изменение ординаты точки 8локации за промежуток времени Ьт;у - ординаты точки локации в моментформирования сигнала на выходе вычислительного устройства 17, соединенного совходом блока 12 управления, представляющая собой, расстояние между точкой 8локации и горизонтальной плоскостью, проходящей через центры блоков источника иприемника;у - предыдущее значение ординатыточки локации, вычисленное устройством 17за промежуток времени Ьт до момента вычисления величины у.Прогноэируемую величину Чу могут определять и другим способом, например,принимать как наиболее вероятную или постоянную величину.Ординату у вычисляют устройством 17 в общем случае по формуле: 3) де В - расстояние междсточника и приемникадной горизонтальной иап - угол между осьриемника и гори у центрами блоков расположенными в оскости;6 ориентации бло онтальной плоско ка 5 пстью; фп - угол между осью 6 ориентации блока 5 приемника и вертикальной плоскостью, проходящей через центры блоков источника и приемника, т.е, угол между указанной вертикальной плоскостью и плоскостью 7;Р - угол между вертикальной плоскостью 4, в которой ориентируют плоский по форме пучок излучения блока 2 источника, и вертикальнойплоскостью, проходящей через центры блоков источника и приемни(2) принимают ви С учетом (3) ус фп 19 ап хсоз ап 30 х (АР где ф - скорость изменения во времени угла Р, т.е, угловая скорость обзорных движений блока 2 источника относительно его вертикальной оси, осуществляемого с помощью сервопривода 20 блока 21 управле ния и вычислительного устройства 17 по заранее выбранной программе;фи - скорость изменения во времени угла Рп, т.е. угловая скорость пеленгующих движений блока 5 приемника относительно 45 его горизонтальной оси, необходимая для совмеЩения точки 8 локации с контролируемой поверхностью в процессе обзорных движений и задаваемая выходным сигналом блока 12 управления. 50Для достижения поставленной цели сигналы О на выходе вычислительного устройства 17 формируют на основе условия (4) с учетом коэффициентов передачи блока 12 управления и сервопривода 13 по следую щему закону: О к;к %гкщд-р, ща,(щр, щр,.1). (5) При контроле профиля поверхности, образованного сечением поверхности вертикальной плоскостью 22, расположенной под углом к вертикальной плоскости, проходящей через центры блоков источника и приемника, на расстоянии б от центра блока 2 источника, регулирование скорости обзорных движений блока источника относительно его вертикальной оси осуществляют с помощью вычислительного устройства 17 блока 21 управления и сервопривода 20 в соответствии с выражением: ф 6) Ниже рассмотрены возможные случаи применения предлагаемого П р и м е р 1. Плоскость 22 через центр блока 2 источника этом случае закон формирования с принимает вид:-фп 19 ап 19 Рп 19 Рп - 1 ) Учитывая, что по своему физическому смыслу величина ап близка к величине угловой скорости йЪ, определяемой формулой (1), можно сделать вывод о том, что величина сигнала О формируемого с целью дальнейшего повышения точности, близка к величине основного сигнала разбаланса Ор, возникающего на входе блока 12 управления в случае отсутствия дополнительного сигнала 0 на другом входе блока 12 управления. Следовательно, сигнал 0 в значительной мере "берет на себя" роль основного сигнала разбаланса и поэтому дополнительное регулироюние скорости пеленгующих движений блока 5 приемника пропорционально сигналу О приводит к значительному уменьшению сигнала разбаланса Ор и динамической погрешности измерения. Погрешность измерения в этом случае определяется практически лишь точностью прогнозирования величины Оу и флуктуацией сигнала раэбаланса на выходе блока 11 сравнения, обусловленной случайным характером отраженного излучения.Р р и м е р 2. Плоскость 22 проходит через центр блока 2 источника ф, =О) и диаметр колошника, а блок 5 приемника расположен на конце другого диаметра колошника, перпендикулярного первому диаметру ф =45 О). В этом случае закон регулирования 0 принимает вид сов ап 8) П р и м е р 3. Плоскость 22 через центры блоков источника и ка ф =О, ри = Ъ =О), расположе метрально противоположно. В э выражение (3) преобразуется к в проходит приемнинных диатом случае 19 аи 1 да, 1 даи+19 а у= В закон регулирования 0 п инимает вид В Гг Р 0) аи Озп 2) - а К 12 К 1 з В 31 п озг В созе Щ 8 и С целью дальнейшего повышения точности измерения путем уменьшения радиационного фона за счет уменьшения размеров облученной зоны в плоскости 4 обзорными движениями дополнительно управляют с помощью блока 23 управления и сервопривода 24 по второму сигналу разбаланса Орг, формируемому с помощью вычислительного устройства 17 по величине пространственного рассогласования осей ориентации 3 и 6 блоков источника и приемника, В общем случае условие отсутствия пространственного рассогласования осей где а, - угол между осью 3 ориентации блока 2 источника и горизонтальной плоскостью;ап - скорость изменения во времени угла,П р и м е р 4. Плоскость 22 проходит через центр блока 5 приемника фи =О), а обзорные движения блока 2 источника осуществляютпо произвольной программе. В этом случае закон регулирования сигнала принимает вид:ориентации 3 и 6, т.е, условие нахожденияуказанных осей в одной плоскости имеетвид: 81 п 19 ап19 аизп и(1 2) Поэтому для непрерывного совмещения оси 3 ориентации блока 2 источника с осью 6 ориентации блока 5 приемника, позволяющего уменьшить размеры облученной зоны без риска срыва слежения, упомянутый сигнал раэбаланса формируют с помощью вычислительного устройства 17 по следующему закону: 10- агс 1 д, (13)зпРи 19 апзп пфициент пропорциональности, в зависимости от коэффициенблока 23 управления и сервописходя из необходимости ловий устойчивого регулирова 2=Цап где К - коэф выбираемый тов передачи ривода 24 создания ус ния;аи - угол ка 2 источн стью. 3 ориентации бл нтальной плоск между ос ика и гор 45формула изобретения 1. Способ определения рельефа и уровня поверхности материалов, заключающийся в том, что контролируемую поверхность 50 облучают коллимированными пучкамиионизирующего излучения, регистрируют отраженное излучение при помощи коллимированного приемника, осуществляют обзорные и пеленгующие двиЖения источника 55 и приемника и определяют координаты точки локации по ориентации источника и щзи емника, при анализе сигналов приемника формируют сигнал разбаланса и управляют пеленгующими движениями по сигналу разПоложительный эффект описанного способа состоит в том, что существенно снижа ется динамическая погрешность измерения,обусловленная снижением интенсивности отраженных сигналов при изменении от-.дельных участков поверхности и при уменьшении активности излучателя блока 35 источника, динамическая погрешность,обусловленная особенностями изменения контролируемого рельефа, поверхности, и случайная составляющая погрешности, обусловленная. радиационным фоном.Кроме этого, описанный способ позволяет снизить время измерения и активность излучателя блока источника, что упрощает обеспечение мер радиационной безопасности.10 1807309 Составитель Е, ГлазковаРедактор С, Кулакова Техред М.Моргентал Корректор Н. Коро каз 1372 Тираж ПодписноеВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж, Раушская наб., 4/5 ский комбинат "Патент", г, Ужгород Производственно-из агарина, 10 баланса, о тл и ч а ю щи й с я тем, что, с целью повышения точности измерения, скорости обзорных движений регулируют пропорционально интенсивности сигналов приемника. 2 Способ поп.1, отл ич аю щи йся тем, что формируют сигнал исходя из условия достижения прогнозируемой скорости изменения ординаты точки локации, а скорость пеленгующих движений дополнительно регулируют пропорционально этому сигналу,3. Способ по пп.1 и 2, о т л и ч а ю щ и йс я тем, что обзорными движениями допол 5 нительно управляют по второму сигналу.разбаланса, формируют по величине пространственного рассогласования осейориентации источника и приемника, формируют сигнал разбаланса и используют его10 для дополнительного управления обзорными движениями,
СмотретьЗаявка
4907343, 30.11.1990
НАУЧНО-ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ "ЧЕРМЕТАВТОМАТИКА", НАУЧНО-ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ "ТУЛАЧЕРМЕТ"
ХАЛЕЦКИЙ БОРИС ЕФИМОВИЧ, ПУХОВ АНАТОЛИЙ ПАВЛОВИЧ, ЦЕЙТЛИН МАРК АРОНОВИЧ, ТАРАН ВИКТОР ПАВЛОВИЧ, ПОЛЫНКИН ГЕННАДИЙ КОНСТАНТИНОВИЧ, ГОЛОВЧЕНКО АНАТОЛИЙ СЕМЕНОВИЧ, БЕЛКИН АЛЕКСАНДР СЕРГЕЕВИЧ, МАУЛЕТОВ НУМЕРЛАН ХАЛЕИТОВИЧ
МПК / Метки
МПК: G01B 15/04
Метки: поверхности, рельефа, уровня
Опубликовано: 07.04.1993
Код ссылки
<a href="https://patents.su/5-1807309-sposob-opredeleniya-relefa-i-urovnya-poverkhnosti-materialov.html" target="_blank" rel="follow" title="База патентов СССР">Способ определения рельефа и уровня поверхности материалов</a>
Способ определения рельефа и уровня поверхности
Номер патента: 1065686
Опубликовано: 07.01.1984
Авторы: Головченко, Полынкин, Таран, Туктамышев, Халецкий, Цейтлин
МПК: G01B 15/04
Метки: поверхности, рельефа, уровня
...в блоке 11 сравнения, получают сигнал разбаланса. В;соответстувии с величиной и полярностью сигнала разбаланса управляют движением20 блока 2 источника и приемника б спомощью соответствующих блоков 12и 13 управления и сервоприводов 14и 15. При нулевом сигнале раэбаланса блок 2 источника и приемник б25 поворачивают таким образом, чтобыцентр 5 облученной зоны и точка 71приемной эон перемещались в одномнаправлении, например, справа налево. При отставании центра приемной30 зоны возникает положительный сигналразбаланса. В соответствии с этимускоряют движение блока приемника б и одновременно замедляютдвижение блока 2 источника до ис 35 чезновения сигнала разбаланса.При отставании центра облученнойзоны возникает отрицательный...
Автоматическое устройство для изготовления электродных блоков химического источника тока

Номер патента: 902114
Опубликовано: 30.01.1982
Авторы: Терентьев, Торочешников, Хохлов, Чернышев
МПК: H01M 6/00
Метки: автоматическое, блоков, источника, химического, электродных
...конструкция механизмов позволяет не останавливая автоматического устройства в момент смены магазинов осуществлять непрерывную подачу электродов к гнездам поворотного стола.Автоматическое устройство работает следующим образом.При дискретном вращении поворотного стола 1 на загрузочные позиции к автооператорам 6 поочередно подводятся гнезда 2. На каждой загрузочной позиции рука авто- оператора 6 в момент выстоя стола совершает ход вниз, при этом одновременно с подходом присоса 7 к стопе электродов в накопителе 11 упор 28 нажимает на рычаг 24, освобождая, тем самым, рейку 21, которая под действием пружины 23 приподнимает всю стопу электродов, находящихся в сменном магазине 1 О и накопителе 11 до соприкосновения с присосом. Захватив...
Способ измерения разности скоростей движения железнодорожного транспортного средства и его колеса

Номер патента: 1418620
Опубликовано: 23.08.1988
Автор: Немировский
МПК: G01P 3/56
Метки: движения, железнодорожного, колеса, разности, скоростей, средства, транспортного
...углом у= - = 90 - у к рельсу равнаьи ь,1 + Б(ч ч)1 ++ - (ч +ч )ьо яВ срС цгде . 8 - коэффициент пропорциональности;яй срч ич и радиальные составляющиескоростей вертикальныхпаразитных перемещенийизлучателя и приемникавдоль направлений АВ.и СЭ (ч= чв 1 п 7ч= ч.вп фсрИз уравнения для м видно, что частота колебаний сигнального пучка вточке приема Э.пропорциональна измеряемой разности скоростей и, крометого, содержит дополнительный (паразитный) сдвиг частоты, пропорциональный скорости вертикальных паразитныхперемещений излучателя и приемникаотносительно рельса 3,Второй (опорный) пучок излучения,зеркально отраженного в точке В колеса 2 вдоль луча ВЕ в направлении8620 10 15 20 25 30 3 141 рельса 3 ( у , = С) и затем - вдоль луча ЕГ в...
Устройство для интервального регулирования движения поездов

Номер патента: 1060528
Опубликовано: 15.12.1983
Авторы: Водяхин, Дмитриев, Кабельский, Куксов, Махмутов, Скороходов
МПК: B61L 23/16
Метки: движения, интервального, поездов
...допустимой скорости движения. Этот сигнал вырабатывает блок генераторов 7 кодовых сигналов, причем выборкодового сигнала производится в этом блоке по командам, поступающим с выходовприемников 12 и 16 и других, следующихпо ходу движения приемников, состояниекоторых зависит от состояния этих рельсовых цепей (свободны или заняты). Кодовыйсигнал из блока генераторов 7 передается врельсовую цепь 1 через фронтовой контакт 58.1 детектора 8 и согласующий узел 5 довступления поезда в зону 9 предварительного регулирования, длина которой выбирается таким образом, чтобы голова поезда,двигающегося с расчетной скоростью, находилась в пределах зоны 9 в течение вре- з 0мени, достаточного для восприятия новогокодового сигнала машинистом и...
Зарядный блок импульсного источника сейсмических сигналов

Номер патента: 1383252
Опубликовано: 23.03.1988
Авторы: Бердников, Ивашин, Пупышев
МПК: G01V 1/157
Метки: блок, зарядный, импульсного, источника, сейсмических, сигналов
...прерывистым, Диоды 2 - 4 выпрямителя открываются теперь не в нульнапряжения сети, а в момент равенства его напряжению накопительного кон"денсатора, Ток зарядных дросселейпрекращается раньше окончания полупериода питающего напряжения,На фиг.З показаны напряжения двухФаз питающего напряжения например,первой фазы - кривая 16 и второйфазы - кривая 17), где- моментвключения выпрямительного диода 2,С, - момент прекращения,така дросселя 5, 4 - момент включения диода3, С - момент прекращения токадросселя 6,Для обеспечения управляемости зарядного процесса, т.е, обеспечениявоэможности выключить тиристор 9, ток через,него должен иметь прерьце вистый характер. Поскольку через тиристор протекают токи трех фаэ, то для обеспечения...
Предыдущий патент: Способ дистанционного определения шероховатости поверхности изделия и устройство для его осуществления
Следующий патент: Устройство для бесконтактного измерения механических колебаний и перемещений
Случайный патент: Сталевозная тележка