Способ определения рельефа и уровня поверхности
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1065686
Авторы: Головченко, Полынкин, Таран, Туктамышев, Халецкий, Цейтлин
Текст
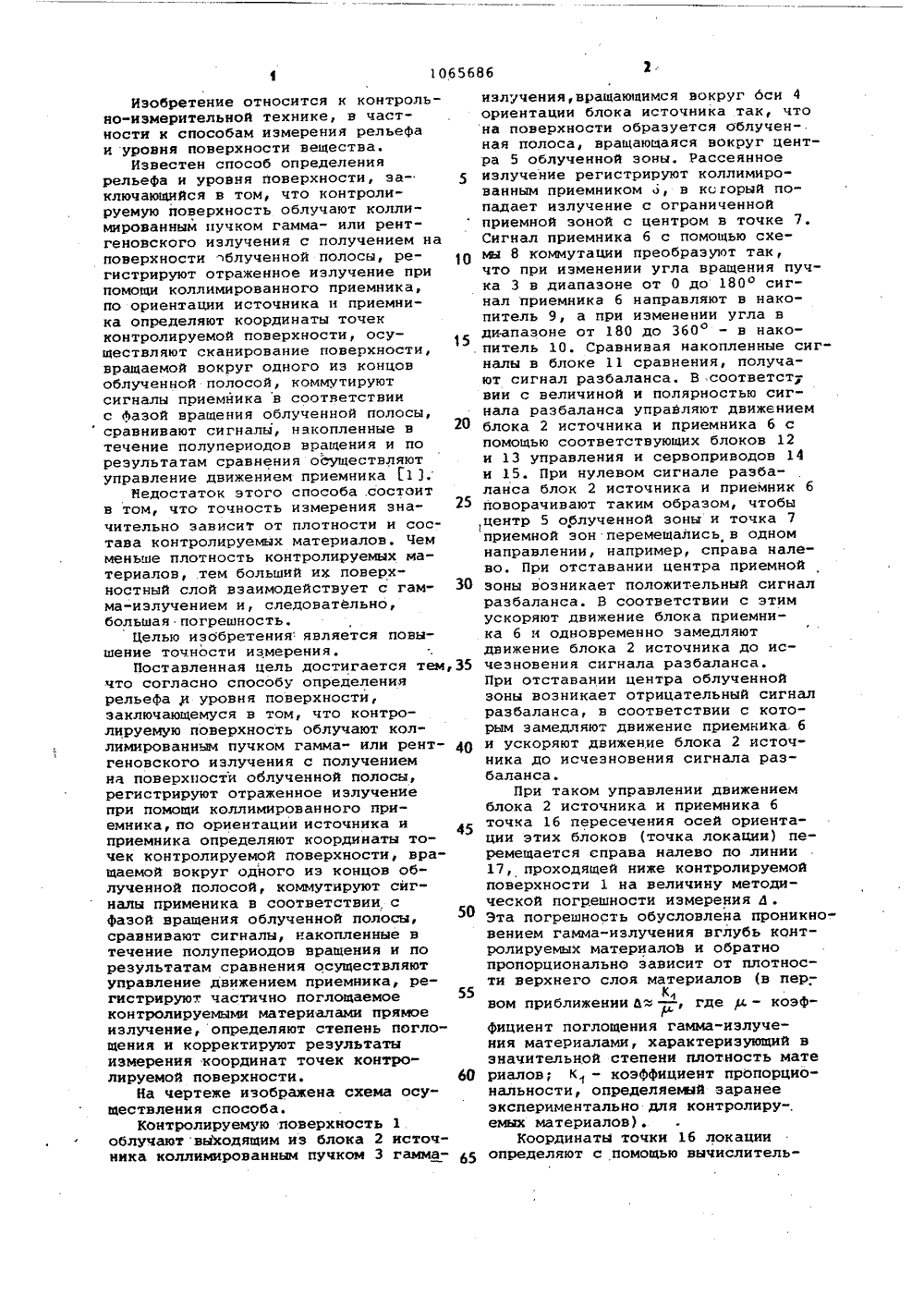
СОЮЗ СОВЕТСКИХСОЦИАЛИСТИЧЕСНИРЕСПУБЛИН П 9) П з(я) а 15 04 САНИЕ ИЗОБРЕТ ТВУ омощи кол оин ГОСУДАРСТВЕННЫЙ НОМИТЕТ ССПО ЯЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫ ВТОРСНОМУ СВИДЕТ(71) Днепропетровский ордена Трудового Красного Знамени горный институт им, Артема(56) 1. Авторское свидетельство СССРР 237411, кл. 6 01 В 15/0,4, 1965.(54)(57) СПОСОБ ОПРЕДЕЛЕНИЯ РЕЛЬЕФАИ УРОВНЯ ПОВЕРХНОСТИ, заключающийся в том, что контролируемую поверхность облучают коллимированнымпучком гамма- или рентгеновскопоизлучения с получением на поверхности облученной полосы, регистрируют отраженное излучение при п лиь.ированного приемника, по р е тацни источника и приемника определяют координаты точек контролируемой . эверхности, вращаемой вокруг одного из концов облученной полоЖ . сой, коммутируют сигналы приемника в соответствии с Фазой вращения облученной полосы, сравнивают сигналы, накопленные в течение полу- периодов вращения и по результатам сравнения осуществляют управление движением приемника, о т л и ч а ющ и й с я тем, что, с целью повыщения точности измерения, регистрируют частично поглощаемое контролируемыми материалами прямое излучение, определяют степень поглощения и корректируют результаты измерения координат точек контролиру" емой поверхности.Изобретение относится к контрольно-измерительной технике, в частности к способам измерения рельефаи уровня поверхности вещества.Известен способ определениярельефа и уровня поверхности, заключающийся в том, что контролируемую поверхность облучают коллимированным пучком гамма- или рентгеновского излучения с получением наповерхности блученной полосы, регистрируют отраженное излучение припомощи коллимированного приемника,по ориентации источника н приемника определяют координаты точекконтролируемой поверхности, осуществляют сканирование поверхности,вращаемой вокруг одного из концовоблученной полосой, коммутируютсигналы приемника в соответствиис Фазой вращения облученной полосы,сравнивают сигналы, накопленные втечение полупериодов вращения и порезультатам сравнения осуществляютуправление движением приемника 1 ).Недостаток этого способа состоитв том, что точность измерения значительно зависит от плотности и состава контролируемых материалов. Чемменьше плотность контролируемых материалов, тем больший их поверхностный слой взаимодействует с гамма"излучением и, следовательно,большая погрешность.Целью изобретения является повышение точности измерения.Поставленная цель достигается тем,что согласно способу определениярельефа н уровня поверхности,заключающемуся в том, что контролируемую поверхность облучают коллимированным пучком гамма" или рентгеновского излучения с получениемиа поверхности облученной полосы,регистрируют отраженное излучениепри помощи коллимированного приемника,по ориентации источника иприемника определяют координаты точек контролируемой поверхности, вращаемой вокруг одного из концов облученной полосой, коммутируют сигналы применика в соответствии сфазой вращения облученной полосы,сравнивают сигналы, накопленные втечение полунериодов вращения и порезультатам сравнения осуществляютуправление движением приемника, регистрируют частично поглощаемоеконтролируемыми материалами прямоеизлучение, определяют степень поглощения и корректируют результатыизмерения координат точек контролируемой поверхности.На чертеже изображена схема осуществления способа.Контролируемую поверхность 1облучают выходящим из блока 2 источника коллимированным пучком 3 гаммаизлучения, вращающимся вокруг Ьси 4ориентации блока источника так, чтона поверхности образуется облучен-.ная полоса, вращающаяся вокруг центра 5 облученной эоны. Рассеянноеизлучение регистрируют коллимированным приемником о, в ксгорый попадает излучение с ограниченнойприемной зоной с центром в точке 7.Сигнал приемника б с помощью схеьы 8 коммутации преобразуют так,что при изменении угла вращения пучка 3 в диапазоне от 0 до 180 сигнал приемника б направляют в накопитель 9, а при изменении угла вдиапазоне от 180 до 360 - в нако.питель 10. Сравнивая накопленные сиг"налы в блоке 11 сравнения, получают сигнал разбаланса. В;соответстувии с величиной и полярностью сигнала разбаланса управляют движением20 блока 2 источника и приемника б спомощью соответствующих блоков 12и 13 управления и сервоприводов 14и 15. При нулевом сигнале раэбаланса блок 2 источника и приемник б25 поворачивают таким образом, чтобыцентр 5 облученной зоны и точка 71приемной эон перемещались в одномнаправлении, например, справа налево. При отставании центра приемной30 зоны возникает положительный сигналразбаланса. В соответствии с этимускоряют движение блока приемника б и одновременно замедляютдвижение блока 2 источника до ис 35 чезновения сигнала разбаланса.При отставании центра облученнойзоны возникает отрицательный сигналразбаланса, в соответствии с которым замедляют движение приемника, б40 и ускоряют движение блока 2 источника до исчезновения сигнала разбаланса,При таком управлении движениемблока 2 источника и приемника бточка 16 пересечения осей ориентации этих блоков (точка локации) перемещается справа налево по линии17, проходящей ниже контролируемойповерхности 1 на величину методической погрешности измерения а .50 Эта погрешность обусловлена проникновением гамма-излучения вглубь контролируемых материалов и обратнопропорционально зависит от плотности верхнего слоя материалов (в пер 55 Х 1вом приближении Ьъ - , где,и, - коэффициент поглощения гамма-излучения материалами, характеризующий взначительной степени плотность мате60 риалов; К - коэФфициент пропорциональности, определяемый заранееэкспериментально для контролиру-.емых материалов).Координаты точки 16 локацииЬ определяют с помощью вычислительЗаказ 11028/41 Тираж 593Подписное ВНИИПИ ГОсударственного комитета СССР по делам изобретений и открытий 113035, Москва, 3-35, Раушская наб;, д. 4/5 ааааа аааааааааааааааааааааФилиал ППП фПатеитфф, г. Ужгород, ул. Проектная, 4 ного устройства 18, связанного сдатчиками 19 и 20, ориентации иблоков источника и приемника.После определения координат нескольких точек начального (периферийного) участка поверхности в эону измерения перемещают детектор 21гамма"излучения с помощью сервопривода 22 и блока 23 управления взависимости от вычисленных ординат этих точек так, чтобы орднната 10детектора 21 была больше ординаты(уровня), например, первой измеренной точки поверхности, т.е,ниже этой точки на заранее выбранную величину д . Далее с помощью 15детектора 21 принимают частично поглощаемое контролируеьыми материалами в зоне измерения прямоеизлучение блока 2, измеряют с помощью интенсиметра 24 интенсивностьимпульсного сигнала детектора 2120и определяют с помощью вычислительного устройства 18 степень поглощения прямого гамма-излучения материалами в зоне измерения. В качестве показателя степени поглощения25используют натуральный логарифмотношения заранее известной интенсивности Зо сигналов детектора 21,рассчитываемой или определяемой заранее экспериментально в случае отсутствия материалов в. зоне располо-,жения этого дете тора, к измереннойинтенсивности 3 сигнала детектора 21при наличии контролируемых материалов в зоне рассложения детектора. 35Определяемая таким образом степеньпоглощения гамма-излучения зависит от плотности верхнего слоя материалов (чем больше плотность, тембольше степень поглощения при прочих одинаковых условиях и наоборот)и, следовательно, в значительнойстепени характеризует эту плотность. При достаточно малых размерах детектора 21 определяемая по описанной методике степень поглощения, как известно, прямо пропорциональна коэффициенту поглощенияор . - :,и( где (.= к (а+а) путьЭпрохождения гамма излучения в контролируемых материалах в направлении от источника излучения к детектору 21; К; - коэффициент пропорциональ" ности, зависящий от угла наклона и уровня начального участка поверхности, который определяют с помощью вычислительного устройства 18 по координатам измеренных точек этого участка поверхности.Далее ординаты измЬренных точек поверхности корректируют с помощью вычислительного устройства 18, уменьшая их на величину б", обратно пропорциональную степени поглощения гамма-излучения материалами в начальной зоне измерения, и определяют поледующие участки рельефа, уменьшая ординаты измеренных точек на ту же величину. Величину 6 определяют по известным значениям К, к, д, Э и 3 в соответствии с формулойд" =4)2оСравнение приведенных соотношений показывает, что величина д" близка к методической погрешности Д.Положительный эффект способа состоит в том, что существенно снижается погрешность измерения рельеФа и уровня поверхности доменной шихты, обусловленная изменением плотности верхнего слоя шихты. Кроме того, получаемая в этом способе информация о плотности верхнего слоя шихты имеет большое практическое значение при управлении доменной печью.
СмотретьЗаявка
3484149, 07.07.1982
ДНЕПРОПЕТРОВСКИЙ ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ГОРНЫЙ ИНСТИТУТ ИМ. АРТЕМА
ГОЛОВЧЕНКО АНАТОЛИЙ СЕМЕНОВИЧ, ХАЛЕЦКИЙ БОРИС ЕФИМОВИЧ, ЦЕЙТЛИН МАРК АРОНОВИЧ, ТУКТАМЫШЕВ ИБРАГИМ ШАРИФОВИЧ, ТАРАН ВИКТОР ПАВЛОВИЧ, ПОЛЫНКИН ГЕННАДИЙ КОНСТАНТИНОВИЧ
МПК / Метки
МПК: G01B 15/04
Метки: поверхности, рельефа, уровня
Опубликовано: 07.01.1984
Код ссылки
<a href="https://patents.su/3-1065686-sposob-opredeleniya-relefa-i-urovnya-poverkhnosti.html" target="_blank" rel="follow" title="База патентов СССР">Способ определения рельефа и уровня поверхности</a>
Установка с источником гамма-излучения co60

Номер патента: 132343
Опубликовано: 01.01.1960
Авторы: Брегер, Гольдин, Осипов
МПК: G21H 5/00
Метки: гамма-излучения, источником
...поверхности до дозы, бе.опасной для обслуживающего персонала.3. Облучатель установки состоит из двадцати отдельных трубок 6рабочего стола 7, на котором, с целью фиксации кассет при выбрачы В,ой конфигурации облучателя, установлены формирующие пластины )ти пластины имеют отверстия 9, в которых укрепляются трубки 6 обчателя, соединенные посредством гибких шлангов с каналами храилиша кассет с препаратами Со (каналы хранилища, кассеты, тр у60 би облучателя вьполнены из нержавеющей стали).В зависимости от выбранной конфигурации облучателя применяютазличные формирующие пластины. Подъем нужного количества касет в облучатель по вертикально расположенным каналам хранилища становки (от одной до двадцати кассет), в зависимости от условий пыта,...
Устройство для определения положения источника гамма излучения в процессе хранения или транспортировки по ампулопроводу

Номер патента: 489363
Опубликовано: 25.10.1975
Автор: Доктор
МПК: G21H 5/00
Метки: ампулопроводу, гамма, излучения, источника, положения, процессе, транспортировки, хранения
...является повышение 20 Т стройств ятем, ч ости работ ндикаторный Это,достигает лемент содержи ится под действ которое све излучения в твия. еств ем гамма го возде ение времени ОПИСАНИЕ 48 вэваИЗОБРЕТЕН Ия48936 Э4Еменяющий свое направление. канал, и друой конец которого соединен с чу Эствитель 1ным элементом 14 яэмерителл светового и, потока 15.; Рекомендуется наносить лако 5 образный слой вещества 16, светящегося с- под действием гамма-излучения, если имеется вероятность выпадения ампулы иэ ль- ващитной оболочки,зрительное восприятие светового сигнала,Торец светопроводящвго кабеля, обращенный к местоположению источникаизлучениможет быть покрыт веществом, светящимс;под действием гамма-излучения,Расположенный вблизи расположения...
Способ приготовления массбауэровских источников гамма квантов

Номер патента: 1721486
Опубликовано: 23.03.1992
Авторы: Акулов, Бурминский, Жантикин, Жетбаев
МПК: G01N 24/00
Метки: гамма, источников, квантов, массбауэровских, приготовления
...счет использованияядерной реакции 6 Сц( Не, а Зп) С и уменьшается сильный фон (который характерендля реакции Со(у,2 п) Сц) под фотопиком63 6167,4 кэВ,выход реакции, приводящей к получению Со при облучении естественной медиионами с энергией Не Е50 МэВ примерно вЗ раза выше,чем при Е не=20 МэВ(приэнергии ионов Не = 20 МэВ находится макзсимум функции возбуждения реакцииСо( Не,а и) Сц), Кроме того, измереноотношение высоты фотопика с энергией67,4 кэВ к фону под этим фотопиком в зависимости от энергии ионов Не.Данные приведены в таблице,Из таблицы видно, преимуществоионов Не с Е 50 МэВ по сравнению сЕ фне=- 20 МэВ,Получение Со при Е не 50 МэВвозможно также из Со по реакцииСо( Не, 26 оЗп) Сц, Облучают обогащенный изотоп зСо при Е Не50 МэВ и...
Радионуклидный источник гамма-излучения

Номер патента: 1289268
Опубликовано: 07.08.1988
Авторы: Алпатов, Бизина, Давыдов
МПК: G21G 4/02
Метки: гамма-излучения, источник, радионуклидный
...ацетон в меньших количествах, во-первыхне будет достигнута необходимая равномерность распределения радиоактивных ядер, во-вторых, не удается надежно осуществить полимериэацию композиции органического связующего.Придобавлении более 10 мас.ч, ацетонавообще не удается получить полимериэацию органического связующего.Уменьшение количества нитрида бора в композиции органического связующего ниже нижнего предела приводитк тому, что нри охлаждении до 4;2 Кизготовленные источники гамма-излучения теряют прочность: радиоактивный материал растрескнвается и распыляется вместе с органическим связующим,Верхний предел кон,ентрации нитрида бора выбран таким образом, чтобынри добавлении в органическое связу" 35 ющее двух, порошков - радиоактивного...
Мессбауэровский источник гамма-излучения и способ его изготовления
Номер патента: 1540574
Опубликовано: 20.11.1999
Авторы: Балуев, Рогозев, Силин
МПК: G21G 4/04
Метки: гамма-излучения, источник, мессбауэровский
1. Мессбауэровский источник гамма-излучения, включающий активный сердечник на основе кобальта, допированного кобальтом-57, отличающийся тем, что, с целью повышения химической устойчивости сердечника и повышения стабильности гамма-резонансных характеристик, использован кобальтат редкоземельного элемента или двойной кобальтат редкоземельного и щелочноземельного элементов.2. Способ изготовления мессбауэровского источника гамма-излучения, включающий приготовление смеси исходных компонентов, допированной кобальтом-57, и ее термообработку, отличающийся тем, что, с целью упрощения технологии изготовления и повышения устойчивости источника, в качестве исходных компонентов используют нитрат...
Предыдущий патент: Кольцевой поплавок ротаметра
Следующий патент: Устройство для выборки и интерполяции на несущей частоте
Случайный патент: Делитель-пылеконцентратор