Интерполятор
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки


Текст
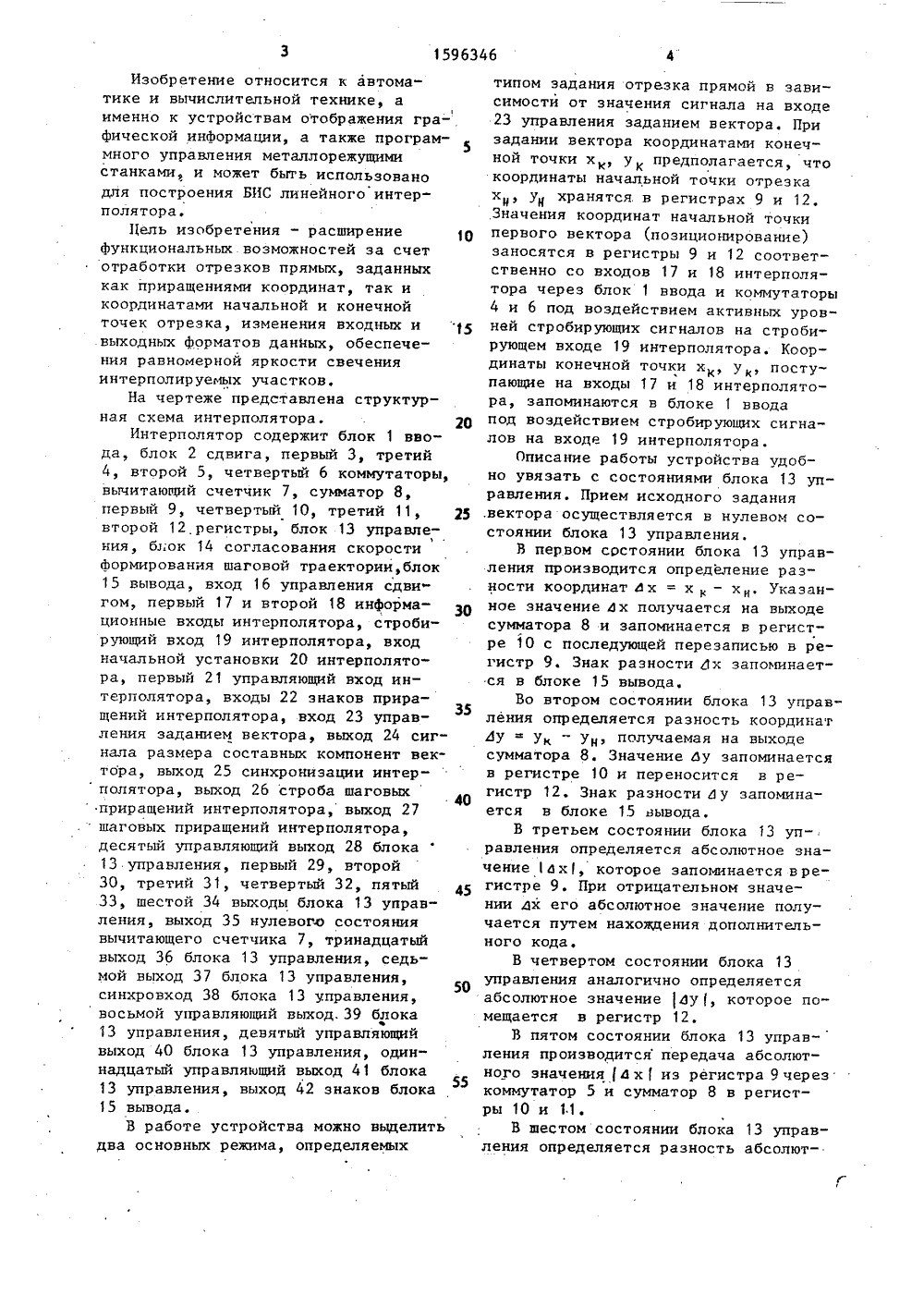
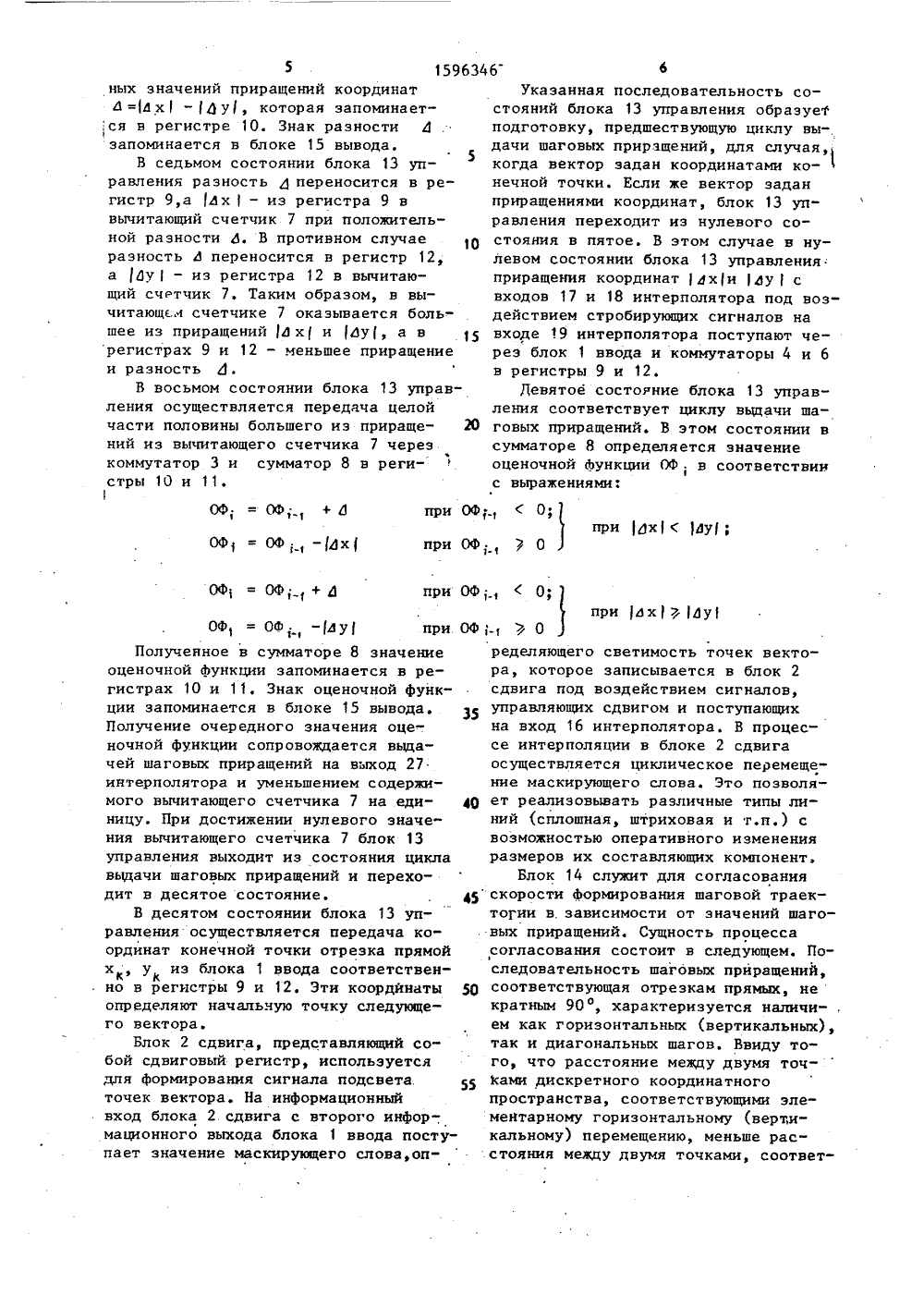
(19) Г 51) 5 ГОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТИРЫТИЯМПРИ ГКНТ СССР 3 ИИ ВЧНКБИг,И(71) Винницкий политехнический институт(56) Авторское свидетельство Р 1413603, кл, С 06 Р 15/353Авторское свидетельство С У. 957171, кл. С 05 В 19/18,как СССР1986.ССР1981,НТЕРПОЛЯТОРзобретение относится к автои вычислительной. технике и использоваться в- устройствах жения графической информации зобретения - расширение функ 54 ати К АВТОРСКОМУ Сви Р 15/353, С 05 В 19/4 2циональных воэможностей за счетработки отрезков прямых, эаданнприращением, так н координатаминачальной и конечной точек отре изменения.входных и выходных форматов данных, обеспечения равномернойяркости свечения интерполируемыхучастков. Цель достигается за счетвведения блока 14 согласования скорости формирования шаговой траектории, формирующего последовательностьтактирующих импульсов с периодом,зависящим от типа щаговых приращений,блока 2 сдвига, формирующегосигналы размера составных компонентвектора, блоков 1 ввода и 15 вывода, осуществляющих привязку к различным форматам устройств, взаимодействующих с интерполятором, и коммутаторов 4 и 6 с соответствующими свя-зями 1 ил,Изобретение относится к автоматике и вычислительной технике, аименно к устройствам отображения графической информации, а также программного управления металлорежущимистанками, и может быть использованодля построения БИС линейного интерполятора.Цель изобретения - расширение 10функциональных возможностей за счетотработки отрезков прямых, заданныхкак приращениями координат, так икоординатами начальной и конечнойточек отрезка, изменения входных и 15выходных форматов данных, обеспечения равномерной яркости свеченияинтерполируемых участков,На чертеже представлена структурная схема интерполятора. 20Интерполятор содержит блок 1 ввода, блок 2 сдвига, первый 3, третий4, второй 5, четвертый 6 коммутаторы,вычитающий счетчик 7, сумматор 8,первый 9, четвертый 10, третий 11, 25второй 12 регистры, блок 13 управления, блок 14 согласования скоростиформирования шаговой траектории, блок15 вывода, вход 16 управления сдвигом, первый 17 и второй 18 информационные входы интерполятора, стробирующий вход 19 интерполятора, входначальной установки 20 интерполятора, первый 21 управляющий вход интерполятора, входы 22 знаков приращений интерполятора, вход 23 управ 35ления заданием вектора, выход 24 сигнала размера составных компонент вектбра, выход 25 синхронизации интерполятора, выход 26 строба шаговых 40приращений интерполятора, выход 27шаговых приращений интерполятора,десятый управляющий выход 28 блока13 управления, первый 29, второй30, третий 31, четвертый 32, пятый33, шестой 34 выходы блока 13 управления, выход 35 нулевого состояниявычитающего счетчика 7, тринадцатыйвыход 36 блока 13 управления, седьмой выход 37 блока 13 управления,синхровход 38 блока 13 управления,восьмой управляющий выход. 39 блока13 управления, девятый управляющийвыход 40 блока 13 управления, одиннадцатый управляющий выход 41 блока13 управления, выход 42 знаков блока5515 вывода.В работе устройства можно выделитьдва основных режима, определяемых типом задания отрезка прямой в зависимости от значения сигнала на входе 23 управления заданием вектора. При задании вектора координатами конечной точки х, у к предполагается, что координаты начальной точки отрезка х, у хранятся в регистрах 9 и 12. Значения координат начальной точки первого вектора (позиционирование) заносятся в регистры 9 и 12 соответственно со входов 17 и 18 интерполятора через блок 1 ввода и коммутаторы 4 и 6 под воздействием активных уровней стробирующих сигналов на стробирующем входе 19 интерполятора. Координаты конечной точки хк, ук, поступающие на входы 17 и 18 интерполятора, запоминаются в блоке 1 ввода под воздействием стробирующих сигналов на входе 19 интерполятора.Описание работы устройства удобно увязать с состояниями блока 13 управления. Прием исходного задания вектора осуществляется в нулевом состоянии блока 13 управления.В первом состоянии блока 13 управления производится определение разности координат дх = х к - х , Указанное значение 4 х получается на выходе сумматора 8 и запоминается в регист" ре 10 с последующей перезаписью в регистр 9, Знак разности Дх запоминается в блоке 15 вывода.Во втором состоянии блока 13 управления определяется разность координат ЛУ " Ук - унт получаемая на выходе сумматора 8. Значение ду запоминается в регистре 10 и переносится в регистр 12, Знак разности Л у запоминается в блоке 15 вывода.В третьем состоянии блока 13 управления определяется абсолютное значение ах, которое запоминается врегистре 9, При отрицательном значении лх его абсолютное значение получается путем нахождения дополнительного кода,В четвертом состоянии блока 13 управления аналогично определяется абсолютное значение ду , которое помещается в регистр 12.В пятом состоянии блока 13 управ-ления производится передача абсолютного значения йхиз регистра 9 через коммутатор 5 и сумматор 8 в регистры 10 и 11.В шестом состоянии блока 13 управления определяется разность абсолют1596346 10 15 20 Оф;,Оф; = Оф;1 +1 ОФ 1 = Оф;, - (Лх( при (дх (ду(; при Оф, ) 0 при Оф мОф Оф; = Оф; + при (дх (Лу( Оф,-10 35 40 50 55 ных значений приращений координатЙ =(б х ( - (4 у (, которая запоминает,ся в регистре 10. Знак разности Дзапоминается в блоке 15 вывода.В седьмом состоянии блока 13 управления разность д переносится в регистр 9,а (Вх ( - из регистра 9 ввычитающий счетчик 7 при положительной разности Д, В противном случаеразность Л переносится в регистр 12,а (оу 1 - из регистра 12 в вычитающий счетчик 7. Таким образом, в вычитающ.м счетчике 7 оказывается большее из приращений (д х( и (ду(, а врегистрах 9 и 12 - меньшее приращениеи разность Д.В восьмом состоянии блока 13 управления осуществляется передача целойчасти половины большего из приращений иэ вычитающего счетчика 7 черезкоммутатор 3 и сумматор 8 в регистры 10 и 11,1 ОФ 1 = Оф;, -(лу( приПолученное в сумматоре 8 значение оценочной функции запоминается в регистрах 10 и 11. Знак оценочной функции запоминается в блоке 15 вывода. Получение очередного значения оце-. ночной функции сопровождается выдачей шаговых приращений на выход 27 интерполятора и уменьшением содержимого вычитающего счетчика 7 на единицу. При достижении нулевого значения вычитающего счетчика 7 блок 13 управления выходит из состояния цикла выдачи щаговых приращений и переходит в десятое состояние.В десятом состоянии блока 13 управления осуществляется передача координат конечной точки отрезка прямой х, у из блока 1 ввода соответственно в регистры 9 и 12. Эти коордйнаты определяют начальчую точку следующего вектора.Блок 2 сдвига, представлякяций собой сдвиговый регистр, используется для формирования сигнала подсвета. точек вектора. На информационный вход блока 2 сдвига с второго информационного выхода блока 1 ввода поступает значение маскирующего слова,опУказанная последовательность состояний блока 13 управления образует подготовку, предшествующую циклу выдачи щаговых приращений, для случая, когда вектор задан координатами конечной точки, Если же вектор задан приращениями координат, блок 13 управления переходит иэ нулевого состояния в пятое. В этом случае в нулевом состоянии блока 13 управления приращения координат (дх(и (у( с входов 17 и 18 интерполятора под воздействием стробирукнцих сигналов на входе 19 интерполятора поступают через блок 1 ввода и коммутаторы 4 и 6 в регистры 9 и 12.Девятое состояние блока 13 управления соответствует циклу выдачи щаговых приращений. В этом состоянии в сумматоре 8 определяется значение оценочной функции ОФ в соответствиис выражениями: ределяющего светимость точек вектора, которое записывается в блок 2 сдвига под воздействием сигналов,управляющих сдвигом и поступающихна вход 16 интерполятора. В процессе интерполяции в блоке 2 сдвигаосуществляется циклическое перемещение маскирующего слова, Это позволяет реализовывать различные типы линий (сплошная, штриховая и т,п.) свозможностью оперативного изменения размеров их составляющих компонент. Блок 14 служит для согласования скорости Формирования шаговой траек то 1 ии в. зависимости от значений шаговых приращений. Сущность процесса согласования состоит в следующем. Последовательность шаговых приращений, соответствующая отрезкам прямых, не кратным 90 О, характеризуется наличи-, ем как горизонтальных (вертикальных), так и диагональных шагов. Ввиду того, что расстояние между двумя точками дискретного координатного пространства, соответствующими элементарному горизонтальному (верти" кальному) перемещению, меньше расстояния между двумя точками, соответ 1596346ствующими выполнению диагонального пер емеще ния, то яркость участков прямой, соответствующая рассмотренным случаям, будет различной. Поскольку яркость свечения определяется временем удержания луча в точках координатного пространства, то ее можно регулировать времечем выдачи шаговых приращений, При этом период 10 формирования координатных щаговых приращений должен быть меньше периода формирования диагонального шагового приращения в 2 раз, Изменение периода формирования шагового приращения в зависимости от его вида может быть достигнуто, например, изменением цикла двухраэрядного сдвигового регистра (циклы на 3-е и на 4-е состояния). В зависимости от сигналов управления режимами, поступающих на вход 21 интерполятора, блок 14 согласования скорости формирования шаговой траектории обеспечивает управление длительностью синхросигналов, по ступающих на синхровход 38 блока 13 управления, чем, в свою очередь, достигается управление длительностью шаговых приращений и равномерная яркость воспроизводимых отрезков,30В предлагаемом интерполяторе за счет введения блока согласования скорости формирования шаговой траектории, формирующего последовательности тактирующих импульсов с периодом, зависящим от типа щаговых фприра 35 щений, достигается равномерная яркость воспроизводимых отрезков, Кроме того, в предлагаемом интерполято ре за счет введения блока сдвига,фор,мирующего сигнал размера составных компонент, достигается возможность оперативного изменения компонент вектора за счет введения блока ввода - воэможность осуществлять привязку к другим устройствам в различных форматах.Формула изобретения Интерполятор, содержащий три ре О гистра, два коммутатора, сумматор, вычитающий счетчик и блок упрацдения с первого по седьмой, выходы которого соединены с управляющими входами первого и второго регистров,пер" вого и второго коммутаторов, входом переноса сумматора, управляющими входами вычитающего счетчика и третьего регистра соответственно, выход последнего соединен с первым информационным входом первого коммутатора, выход которого соединен с входом первого слагаемого сумматора, прямые выходы первого и второго регистров соединены с первым и вторым информационными входами второго коммутатора, выход которого соединен с параллельным входом вычитающего счетчика, выход нулевого состояния которого соединен с входом сигнала окончания отработки шаговых приращений блока управления, вход начальной установки которого является входом начальной установки интерполятора, о т л и ч а ю щ и й с я. тем, что, с целью расширения функциональных возможностей за счет отработки отрезков прямых, заданных как приращением, так и координатами начальной и конечной точек отрезка, изменения входных и выходных форматов данных, обеспечения равномерной яркости свечения интерполируемых участков, он содержит третий и четвертый коммутаторы, блок сдвига, блок ввода, блок согласования скорости формирования шаговой траектории и блок вывода, входы знаков приращения которого являются входами знаков приращенияинтерполятора, вход управления задания вектора, который соединен с входами задания вектора блока управления и блока вывода, выход щаговых приращений которого является выходом шаговых приращений интерполятора, первый управляющий вход которого соединен с входом управления режимами блока согласования скорости формиро- . вания шаговой траектории, синхровыход которого соединен с синхровходом блока управления, восьмой и девятый управляющий выходы которого соединены с первым управляющим входом блока согласования скорости формирования шаговой траектории, стробирующий вход которого соединен со стробирующим входом блока. ввода и является стробирующим входом интерполятора, первый и второй информационные входы которого соединены с первым и вторым информационными входами блока ввода соответственно, первый и второй информационные выходы которого соединены,с первыми входами третьего и четвертого коммутатора соответственно, выходы которых соединены. с информационными входами первого и10 1596346 гСоставитель Д.ОбодникРедактор Л.Веселовская Техред Л.Олийиык Корректор С,йевкун Заказ 2911 Тираж 581 ПодписноеВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР113035, Москва, ЖРаушская наб д. 4/5 Производственно-издательский комбинат "Патент", г.ужгород, ул. Гагарина,301 второго регистров соответственно, инверсные выходы которых соединены с третьим и четвертым информационными входами второго коммутатора, выход которого соединен с входом второго5 слагаемого сумматора, выход которого соединен с информационным входом четвертого регистра, выход которого соединен с информационным входом треутьего регистра и вторыми информационными входами третьего и четвертого коммутаторов, управляющие входы которых соединены с десятым управляющим выходом блока управления, одиннадцатый управляющий выход которого соединен с входом стробирования шаговых приращений блока вывода и является выходом стробирования шаговых приращений интерполятора, вход уп равления сдвигом которого соединен с управляющим входом блока сдвига, выход которого является выходом сигнала размера составных компонент У вектора интерполятора, выход синхро-.низации которого соединен с двенад-цатым выходом блока управления, тринадцатый выход которого соединен суправляющим входом четвертого регистра, информационный выход вычитающего счетчика соединен с вторым информационным входом первого коммутататора, третий информационный входкоторого соединен с информационнымвходом блока сдвига и вторым информационным выходом блока ввода, первый информационный выход которогосоединен с четвертым информационнымвходом коммутатора, выход нулевогосостояния счетчика соединен с входомсигнала окончания отработки шаговыхприращений блока согласования .скорости формирования шаговых траекторий, выход переноса сумматора соединен с управляющим входом блока вывода, выход знаков которого соединенс входом знаков блока управления.
СмотретьЗаявка
4328589, 18.11.1987
ВИННИЦКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ
ПЕТУХ АНАТОЛИЙ МИХАЙЛОВИЧ, ВЕРХОВОЙ ВИКТОР ПЕТРОВИЧ, САЧАНЮК ВАСИЛИЙ ИВАНОВИЧ, ОБОДНИК ДЕМЬЯН ТИХОНОВИЧ, РОМАНЮК АЛЕКСАНДР НИКИФОРОВИЧ, МАЙДАНЮК ВЛАДИМИР ПАВЛОВИЧ, СОКОЛ МИХАИЛ ЛЕОНИДОВИЧ, ТЮЛЬТИН АНАТОЛИЙ МИХАЙЛОВИЧ, ЩАПОВ ВЛАДИМИР НИКОЛАЕВИЧ
МПК / Метки
МПК: G05B 19/4103, G06F 17/17
Метки: интерполятор
Опубликовано: 30.09.1990
Код ссылки
<a href="https://patents.su/5-1596346-interpolyator.html" target="_blank" rel="follow" title="База патентов СССР">Интерполятор</a>
Механизм для соединения пружинньх блоков мягкой мебели

Номер патента: 262338
Опубликовано: 01.01.1970
Авторы: Алексеенко, Бочаров, Гузев
МПК: A47C 23/053
Метки: блоков, мебели, механизм, мягкой, пружинньх, соединения
...снабженный с двух боковых продольных сторон двумя парами направляющих 2 и 3, на каждой из которых установлено по одной каретке 4 на четырех катках 5. 11 каждой карет. ке установлен электродвигатель 6; вал 7 которого фрикционно контактирует с приводным диском 8 сшивного механизма, Последний включает стойку 9 с валом 10, несущим с одного конца приводной диск 8. а с другого конца гибкий вал 11 с наконечником 12, захватывающим сшивающую цилиндрическую спиральную пружину 18. На корпусе каретки шарнирно укреплена подпружиненная ножная педаль 14 механизма включения, несущая на верхнем конце жестко закрепленную стойку 9 ситивного механизма, Для удерживания сшивной пружины 18 в удобном ири работе положении на каретке имеется стойка 15 с шарнирным...
Стыковое соединение смежных блоков железобетонной балки

Номер патента: 360450
Опубликовано: 01.01.1972
Авторы: Иосилевский, Чирков
МПК: E04B 1/61
Метки: балки, блоков, железобетонной, смежных, соединение, стыковое
...этих стержней переменная и равна высоте блока 1 в зоне стыка, а диаметр стержней равен диаметру напрягаемых хомутов. После бетонирования временные стержни удаляют, в результате чего образуются каналы 3 для напряженных хомутов в блоке 1. После отпуска натяжения арматуры блок 1 вынимается из стенда.В т о р а я с т а д и я. Изготовление блоков 11. Чтобы достигнуть плотного прилегания по контакту блоков 1 и 11, блок 1 используется в качестве опалубки по поверхности косого стыка.Соприкасающуюся с блоком 11 поверхность блока 1 смазывают или в зону контакта вставляют тонкие упругие разделяющие прокладки. В образованные ранее каналы 3 блока 1 вставляются изолированные от сцепления с бетоном напрягаемые хомуты 2 длиной, равной полной высоте...
Цифровой интерполятор
Номер патента: 557370
Опубликовано: 05.05.1977
Авторы: Гладких, Золотенков, Костюк
МПК: G06F 17/17
Метки: интерполятор, цифровой
...и блоку вывода.В блок 1 перед началом работы вводится начальные значении коаффициентов С(М = 0,1,21 ъ,где щ - степень интерполируемого полинома), определенные по формуле:"гф к=к о 1рк-1( -и "О - .,Игде 1, - значение аргумента в начальнойточками,х - значение 1, -ой производной4 М1,рпопинома в начальной точке;р - приращение аргумента, выбираемое по формулеР г(гдеоснование системы счисления,а 3 - любое целое число.В регистр сдвига 4 вводится величинасдвига, равная 1Вычисление полинома производится наоснове соотношенийс ( р) с Ы с ( р) ргдед ич, - 1,и,О.Устройсгво работает следующим образом.По сигналам блока управления 6 из блокачерез элемент И 2 на первый вход сумматора 3 поступает значение коаффициепта С , а регистр сдвига 4 - значение...
Устройство для соединения подвижных блоков радиоэлектронной аппаратуры

Номер патента: 1432818
Опубликовано: 23.10.1988
Авторы: Девяткова, Малявко, Соцков
МПК: H05K 7/12
Метки: аппаратуры, блоков, подвижных, радиоэлектронной, соединения
...в частности к технике конструирования блоков радиоэлектронной аппаратуры.Цель изобретения - упрощение конструкции и повышение надежности в работе.Предлагаемое техническое решение позволяет исключить из состава устройства громоздкие вращающиеся детали и соответствующие приспособления для фиксации этих деталей в крайних положениях,. что повышает надежность работы устройства, сокращает траекто рию движения узла защиты изолированных проводов, уменьшает углы их изгиба.На чертеже схематически изображено предлагаемое устройство, 20Устройство содержит подвижную подпружиненную скобу 1, на которой жестка закреплены изолированные про-вода 2, соединяющие неподвижный 3 и подвижный 4 блоки, направляющие рей ки 5, жестко закрепленные на...
Узел соединения структурного блока покрытия с колонной

Номер патента: 1622541
Опубликовано: 23.01.1991
Авторы: Клименюк, Обламиев, Орлик, Федоренко, Харченко
Метки: блока, колонной, покрытия, соединения, структурного, узел
...монтажа,На фиг, 1 изображен узел соединения перед монтажом, вид в плане; на фиг, 2 - сечение А - А на фиг, 1; на фиг. 3 - узел 10 соединения после окончания монтажа, вид в плане; на фиг, 4 - сечение Б - Б на фиг, 3.Узел соединения включает крепежный элемент 1 в виде шипов, прикрепленных на опорной части колонны 2, и фиксирующий 15 элемент 3 в виде спаренных прямоугольных коробчатых элементов, заполненных взаимно перпендикулярными г 1 ластинами 4, прикрепленный на опорной части структурного блока 5 покрытия. Для предотвращения вы падания пластин при монтаже коробчатые элементы выполнены с выступом 6, а пласти н ы - с соответствующей выемкой 7.Монтаж узла осуществляется следующим образом, 25Монтажным механизмом поднимают структурный...
Предыдущий патент: Устройство для реализации подстановок
Следующий патент: Устройство для цифровой фильтрации
Случайный патент: Устройство для автоматического управления процессом сварки