Цифровая система для программного управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1441352
Автор: Павлов

Текст
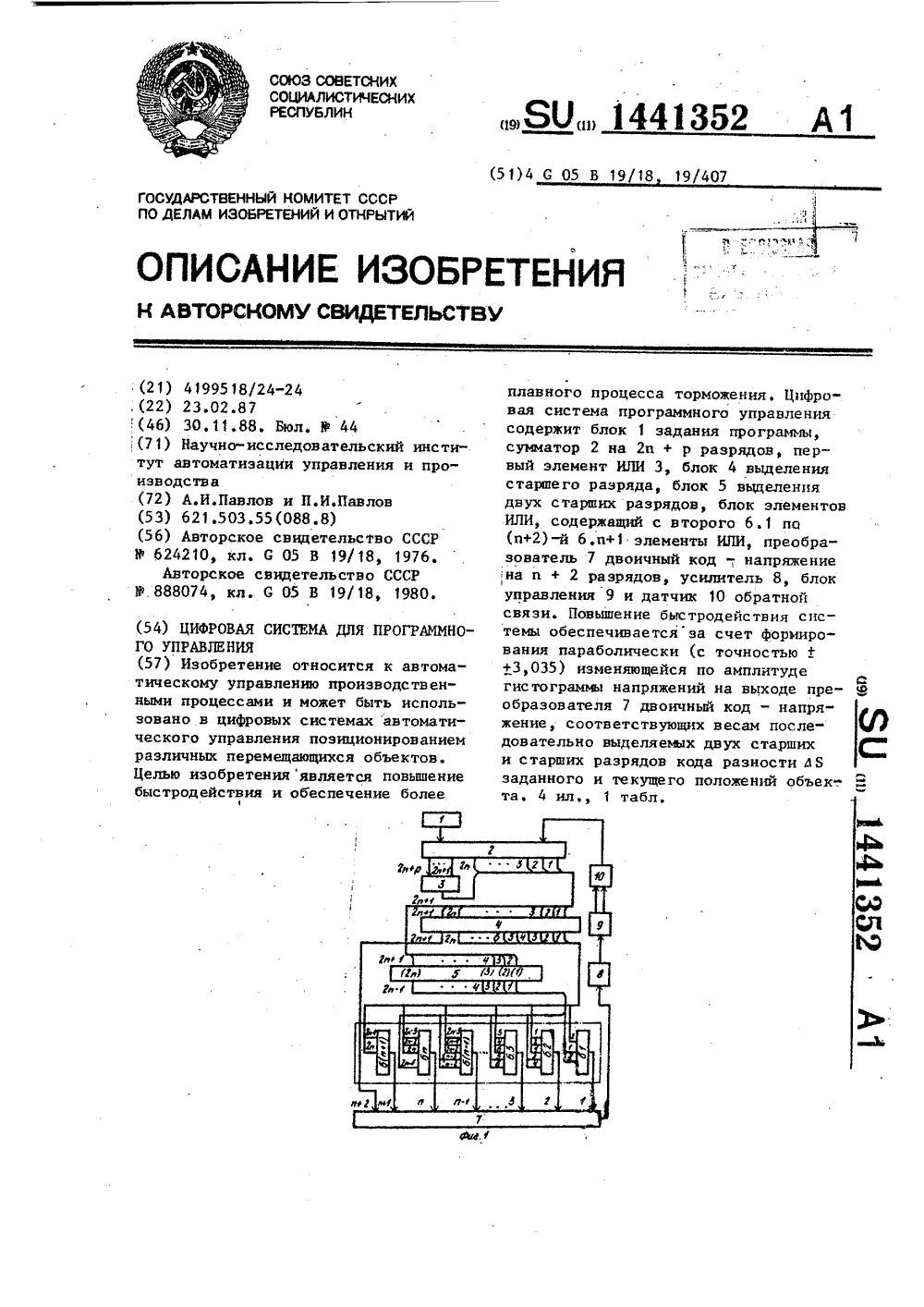
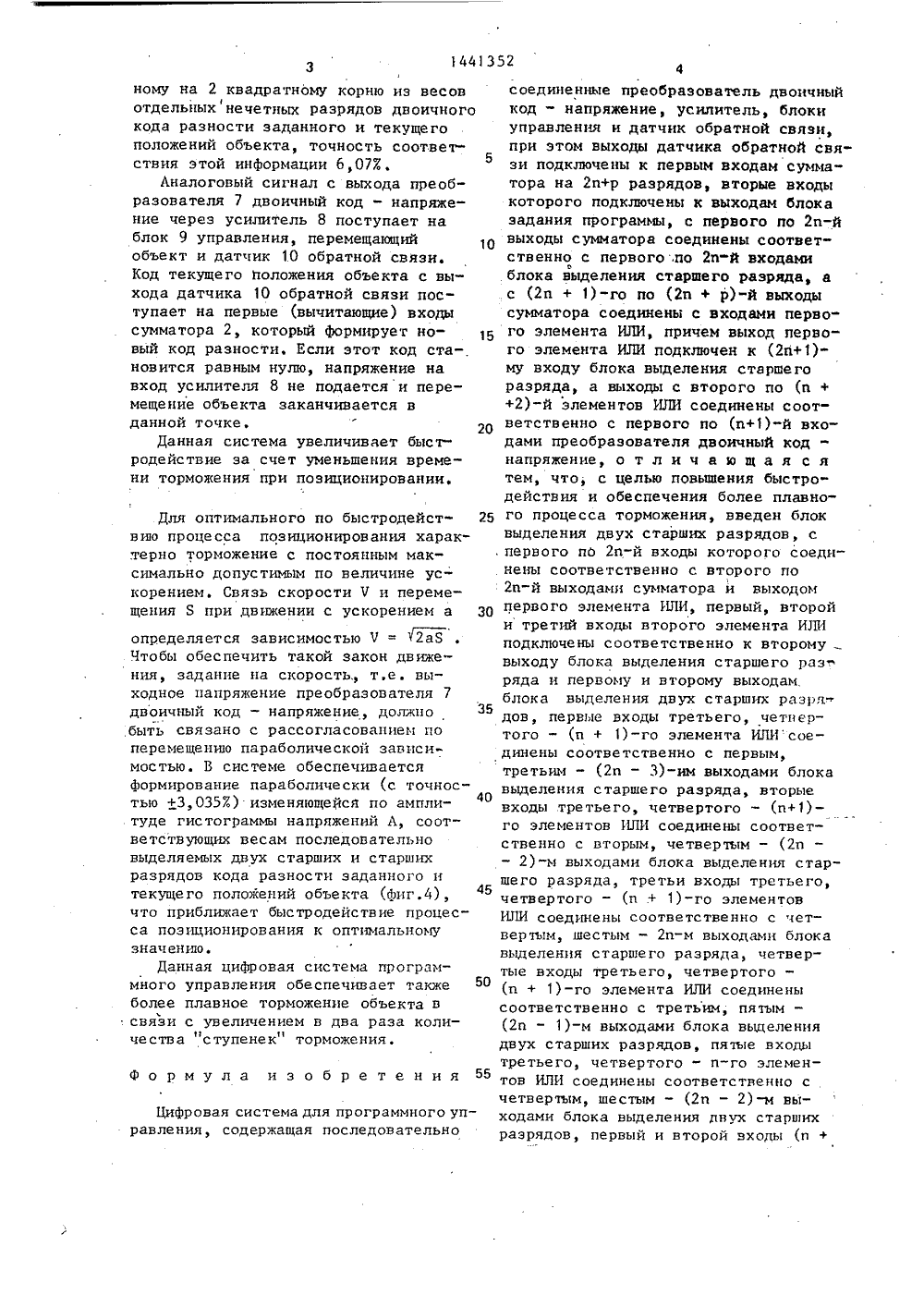
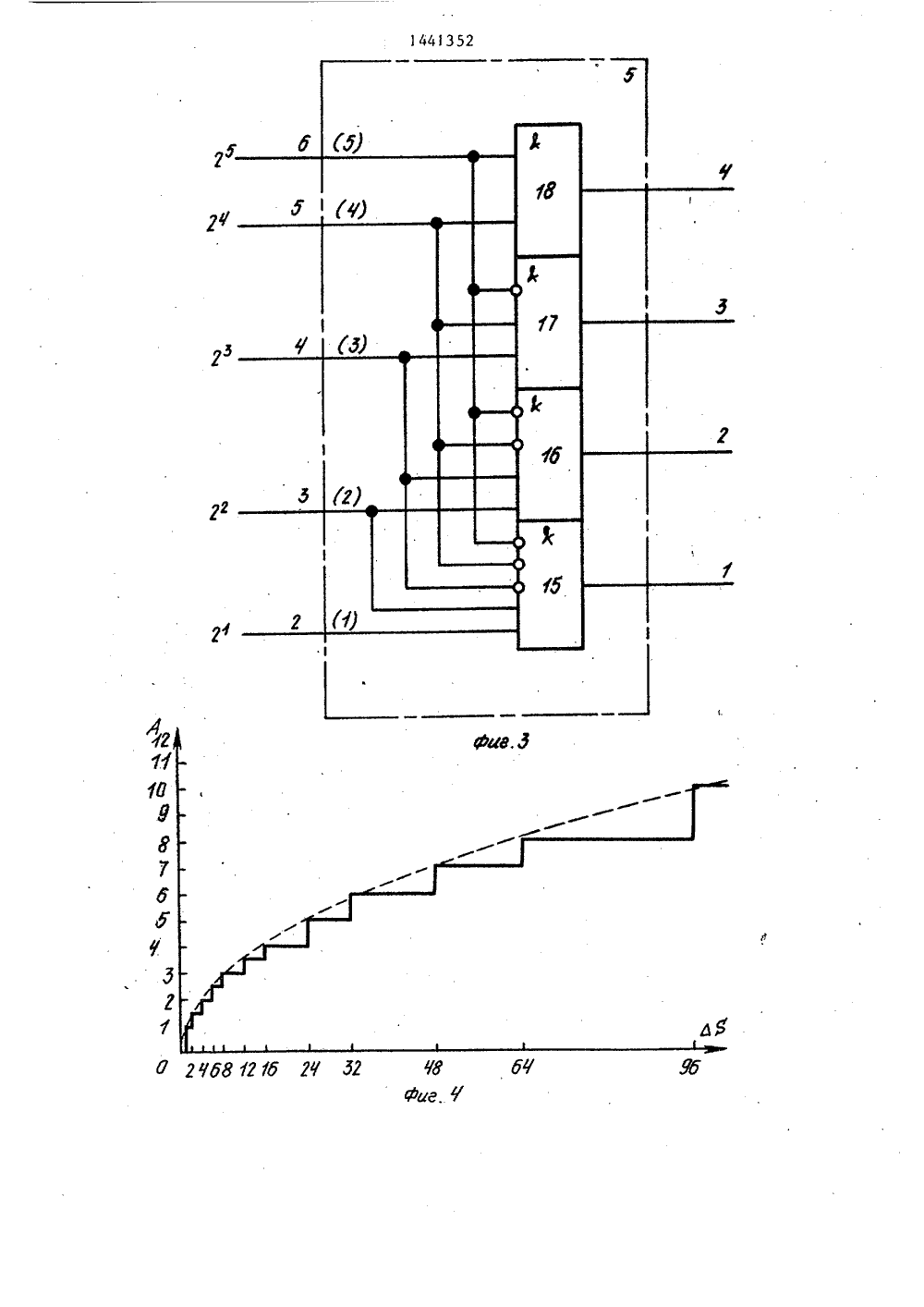
ОЮЗ СОВЕТСНИХ ОЦИАЛИСТИЧЕСНИРЕСПУБЛИХ 9) (Ш 1352(51) 4 С 19/407 ГОСУДАРСТВЕННЫЙ ПО ДЕЛАМ ИЗОБРЕТ ТЕТ СССРИ ОТНРЫТИИ ЕТЕНИУ ИСАНИ Е ИЗОБ СВИДЕТЕЛЬС ВТОРЯК, (71) тут изво (72) (53) (56)У 62 типро(54) ЦИФ ГО УПРАВ (57) Из РОВАЯ СИСТЕМА ДЛЯ П ЛЕНИЯобретение относитсяму управлению произвцессами и может быт цифровых системах управления поэиционы перемещающихся об обретения являетсяействия и обеспечени ОГРАММНОк автомаодств ень испольеск ными зовано вческого ав тома ти- ированием различи Целью и быстрод ъектов,овьппе ние более 4199518/24-2423.02.8730.11 88. Вюл. В 44Научно-исследовательский инавтоматизации управления иств аА.И.Павлов и П.И.Павлов621.503.55(088.8)Авторское свидетельство СС210, кл, С 05 В 19/18, 197торское свидетельство СССР074, кл. С 05 В 19/18, 198 плавного процесса торможения. Цифровая система программного управления содержит блок 1 задания программы, сумматор 2 на 2 п + р разрядов, первый элемент ИЛИ 3, блок 4 выделения старшего разряда, блок 5 выделения двух старших разрядов, блок элементов ИЛИ, содержащий с второго 6.1 по (и+2)-й б,п+1 элементы Ю 1 И, преобразователь 7 двоичный код -, напряжение на и + 2 разрядов, усилитель 8, блок управления 9 и датчик 10 обратной связи. Повышение быстродействия системы обеспечиваетсяза счет формирования параболически (с точностью + +3,035) изменяющейся по амплитудей гистограммы напряжений на выходе пре образователя 7 двоичный код - напряжение, соответствующих весам последовательно выделяемых двух старших С" и старших разрядов кода разности ВБ заданного и текущего положений объек". Д та. 4 ил 1 табл.35 Изобретение относится к автоматическому управлению производственнымипроцессами и может быть применено вцифровых системах автоматическогоуправления позиционированием различ 5ных перемещающихся объектов.Целью изобретения является повышение быстродействия и обеспечениеболее плавного торможения. 10На фиг. 1 представлена блок-схемацифровой системы программного управления на фиг, 2 - функциональнаясхема блока выделения старшего разряда, на фиг. 3 - функциональная схема блока выделения двух старших разрядов; на фиг. 4 - зависимость амплитуды аналогового сигнала А на выходе преобразователя двоичный код -напряжение от кода разности Л Я заданного и текущего положений объекта.Система содержит (фиг. 1) блок 1задания программы, сумматор 2 на2 п + р разрядов, первый элементИЛИ 3, блок 4 выделения старшего 25разряда, блок 5 выделения. двух стар"ших разрядов, блок элементов ИЛИ,содержащий с второго 6.1 по (и+2)-й6.(п+1) элементы ИЛИ, преобразователь 7 двоичный код - напряжение 30на и+2 разрядов, усилитель 8, блокуправления 9 и датчик 10 обратнойсвязи,Блок 4 выделения старшего разрядана пять входов и пять выходов(фиг, 2) содержит с первого по чет"вертый элементы И 11-И 14.Блок 4 выделения старшего разряда на 2 п+1 вход и 2 п+1 выход можетбыть выполнен аналогично приведенно.-. 40му на фиг. 2, т.е. содержит с первого по 2 п-й элементы И, при этом прямые входы с первого по 2 п-й элементовИ этого блока соединены соответственно с входами с первого по 2 п"йблока 4, с первого по 2 п-й инверсныевходы первого элемента И соединенысоответственно с входами с второгопо (2 п+1)-й блока 4, с первого по(2 п)-й инверсные входы второгоэлемента И соединены соответственнос входами с третьего по (2 п+1)-йблока 4, с первого по (2 п)-й инверсные входы третьего элемента Исоединены соответственно с входами счетвертого по (2 п+1)-й блока 4 и55т.д.Блок 5 выделения двух старшихразрядов на пять входов и четыре выхода (фиг, 3) содержит с первого почетвертый элементы И 15-И 18, Нумерация входов блока 5 выделения двухстарших разрядов на фиг, 1 и 3 данав скобках,Блок 5 выделения двух старшихразрядов на 2 п входов и 2 пвыходовпримененный в системе, может бытьвыполнен аналогично приведенномуна фиг. 3,В качестве блока 9 управления может быть применен электропривод постоянного тока.Система работает следующим образом.Блок 1 задания программы, который может быть выполнен, например, на программных переключателях, выдает всумматор 2 код заданного положенияобъекта, сумматор 2 на своих выходах формирует двоичный код разностид Я заданного и текущего положенийобъекта. С первого по 2 п-й разряддвоичного кода разности 6 Я поступаютнепосредственно в блок 4 выделениястаршего разряда, а с (2 п+1)-го по(2 п+р)-й старшие разряды через элемент ИЛИ 3.При этом разрядность сумматора 2,равная (2 п+р), определяет максимальный путь перемещения Ь механизма(например, суппорта станка) или обрабатываемого изделия (например,стальной ленты в автоматической линиипо поперечному раскрою рулонногоматериала),: а количество разрядовдвоичного кода разности дЯ, поступающих непосредственно в блок 4 выделения старшего разряда и равных2 п, определяет максимально требуемый путь торможения Яс номинальнойскорости Ч, Например, при3276,7 мм,= 0,1 мм и Я.,=51,2 ммк входам первого элемента ИЛИ 3должно быть подключено пять разрядов(соответствующих степенным числам2, 2", 2 12 2и 2 ) выходасумматора 2, а общее количество выходов этого сумматора равно пятнадцати.При помощи элементов ИЛИ 6.1"6(п++1), а также блока 4 выделения старшего разряда и блока 5 выделения двухстарших разрядов на цифровые входыпреобразователя 7 двоичный код - напряжение подается информация из сумматора 2 в соответствии с таблицей,Эта информация соответствует умноженному на 2 квадратному корню из весов отдельных нечетных разрядов двоичного кода разности заданного и текущего положений объекта, точность соответствия этой информации 6,07%.Аналоговый сигнал с выхода преобразователя 7 двоичный код - напряжение через усилитель 8 поступает на блок 9 управления, перемещающий объект и датчик 1.0 обратной связи. Код текущего Положения объекта с выхода датчика 10 обратной связи поступает на первые (вычитающие) входы сумматора 2, который формирует но вый код разности, Если этот код ста-, новится равным нулю, напряжение на вход усилителя 8 не подается и перемещение объекта заканчивается в данной точке. 20Данная система увеличивает быстродействие за счет уменьшения времени торможения при позиционировании.Для оптимального по быстродейст вко процесса позиционирования харак" терно торможение с постоянным максимально допустимым по величине ускорением. Связь скорости Ч и перемещения Я при движении с ускорением а 30 определяется зависимостью Ч = 2 аБ Чтобы обеспечить такой закон движения, задание на скорость т,е. выходное напряжение преобразователя 7 двоичный код - напряжение, должно Зб быть связано с рассогласованием по перемещенко параболической зависимостью. В системе обеспечивается формирование параболически (с гочностью +3,035%) изменяющейся по амплитуде гистограммы напряжений А, соответствующих весам последовательно выделяемых двух старших и старших разрядов кода разности заданного и текущего положений объекта (фиг.4), 45 что приближает быстродействие процесса позиционирования к оптимальному значенко.Данная цифровая система программного управления обеспечивает также более плавное торможение объекта в связи с увеличением в два раза количества ступенекторможения.Формула изобретения 55Цифровая система для программного управления, содержащая последовательно соединенные преобразователь двоичный код - напряжение, усилитель, блоки управления и датчик обратной связи, при этом выходы датчика обратной связи подключены к первым входам сумматора на 2 и+р разрядов, вторые входы которого подключены к выходам блока задания программы, с первого по 2 и-й выходы сумматора соединены соответ" ственно с первого по 2 и-й входамио. блока выделения старшего разряда, а с (2 и + 1)-го по (2 и + р)-й выходы сумматора соединены с входами первого элемента ИЛИ, причем выход первого элемента ИЛИ подключен к (2 п+1)- му входу блока выделения старшего разряда, а выходы с второго по (и + +2)-й элементов ИЛИ соединены соответственно с первого по (и+1)-й входами преобразователя двоичный код " напряжение, отличающая с я тем, что, с целью повышения быстродействия и обеспечения более плавного процесса торможения, введен блок выделения двух старших разрядов, с первого по 2 и-й входы которого соединены соответственно с второго по 2 и-й выходами сумматора и выходом первого элемента ИЛИ, первый, второй и третий входы второго элемента ИЛИ подключены соответственно к второму выходу блока выделения старшего разт ряда и первому и второму выходам. блока выделения двух старших разря дов, первые входы третьего, четвертого - (и + 1)-го элемента ИЛИсоединены соответственно с первым, третьим - (2 и - 3)-нм выходами блока выделения старшего разряда, вторые входы третьего, четвертого - (и+1)- го элементов ИЛИ соединены соответственно с вторым, четвертым - (2 и -- 2)-и выходами блока выделения старшего разряда, третьи входы третьего, четвертого - (и .+ 1)-го элементов ИЛИ соединены соответственно с четвертым, шестым - 2 и-м выходами блока выделения старшего разряда, четвертые входы третьего, четвертого - (и + 1)-го элемента ИЛИ соединены соответственно с третьим, пятым - (2 и - 1)-м выходами блока выделения двух старших разрядов, пятые входы третьего, четвертого - и-го элементов ИЛИ соединены соответственно с четвертым, шестым - (2 и - 2)-м выходами блока выделения двух старших разрядов, первый и второй входы (и +4352да, (2 п + 1)-й выход которого подключен к (и+2)-му входу преобразователядвоичный код - напряжение .1Ваивр аикоив блока 4 1 2 З Стеовииое число с ословалави 2, аиу соответ"старова ге 2 21 г 1 2 4 десатичиое чмло еФсоотаетсте зита в 1 гв 64 16 Зг Валер аиколв блоха 5 Стелеваое число с осао, вавиеи 2, аиу соотват- стауииае 2 +2 ч 2 +2 2 г 22г +2 2.гф г 4 Лвсатлчвое чаем, аиусоответсте утииа Нокер вкала лреобраво вателл 7 2 12 3 13 23 123 45 345 3,4 г,з,4 5 3,5 Стелелкое число с осаовацпи 2 виу соответствуввле г+г г+21+2 1 гег 24 гф+г т ггт 2 г +г Ласлтачиов чфло аиусоотэ втстауииеа 24 26 6 7 4+ 2)-го элемента ИЛИ соединены соответственно с (2 п - 1)-гб и 2 п-м выходами блока выделения старшего раэря 27 22 24+21 2+2 гф г 2 гв 1 о 1 г 14 16 го
СмотретьЗаявка
4199518, 23.02.1987
НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ ИНСТИТУТ АВТОМАТИЗАЦИИ УПРАВЛЕНИЯ И ПРОИЗВОДСТВА
ПАВЛОВ АНДРЕЙ ИВАНОВИЧ, ПАВЛОВ ПАВЕЛ ИВАНОВИЧ
МПК / Метки
МПК: G05B 19/18, G05B 19/416
Метки: программного, цифровая
Опубликовано: 30.11.1988
Код ссылки
<a href="https://patents.su/5-1441352-cifrovaya-sistema-dlya-programmnogo-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Цифровая система для программного управления</a>
Тестер для контроля цифровых блоков

Номер патента: 1555704
Опубликовано: 07.04.1990
Авторы: Баранов, Краснов, Уваров
МПК: G06F 11/26
Метки: блоков, тестер, цифровых
...вывод,а на вывод, на который подавался "О",подается высокоимпедансное состояниеи т.д, При каждом новом положении"О" на выводах ИС блоком 9 компараторов производится контроль искажения уровней подаваемых напряжений,Для этого информация с выходов блока9 через блок 3 по сигналам Р 4 считывается в УТР, При обнаружении замыканий номера выводов фиксируются, За 1 11тем 1 передвигается на следующийвывод и процесс повторяется до окончания контроля замыканий всех выводов.щая информация подается на один вход,Если среди замкнутых выводов есть выход, то высокоимпедансное состояниеподается на все выводы, а тестирующаяинформация на входы ИС поступает сзамкнутого с ними выхода,Далее производится коммутация выводов ИС 11, встроенной в цифровойблок, с...
Устройство для преобразования угла поворота вала в код

Номер патента: 930332
Опубликовано: 23.05.1982
Авторы: Анищенко, Соколинский, Третьяков
МПК: G08C 9/04
Метки: вала, код, поворота, преобразования, угла
...синхронизируещих напряжений и эпюры, обеспечивающие определение квадранта; на фиг. 3 - экспериментальная зависимость синхрониэирующего напряжения сельсина от угла поворота его ротора.Устройство для преобразования угла поворота вала в код (фиг. 1) содержит сельсин-датчик 1, преобразователь 2 напряжения в код, блок 3 определения квадранта, состоящий изблока 1 определения четности и блока5 фиксации перемены фазы, блок бсовпадения и блок 7 памяти,Устройство работает следующимобразом,Амплитуды выходных синхронизирующих напряжений сельсина-датчика 1Ои О ,изменяются в зависимостиот углового перемещения его ротора (фиг. 2 а, б, в), Эта зависимость однозначна в пределах изменения сот 0 до /2 для любого синхронизирую- щего напряжения в 1...
Устройство для управления подключением к магистрали общего блока памяти

Номер патента: 934834
Опубликовано: 07.02.1985
Авторы: Верховина, Снегирев, Фельдман
МПК: G06F 13/16, G06F 9/50
Метки: блока, магистрали, общего, памяти, подключением
...входом блока арбитража, выход которого соединен со вторым управляющим входом блока управления направлением передачи, второй управляющий выход которого соединен с управляющим входом блока связи, с магистралью общего блока памяти, вторые информационные, управляющие и адресные входы/выходы блоковсвязи с магистралью общего блока памяти всех каналов соединены соответственно и подключены к магистралиобщего блока памяти, которая является второй группой информационных, управляющих и адресных выходов устройства, группы управляющих входов/выходов блоков арбитража каждого канала соединены между собой,Цель достигается также тем, чтоблок арбитража содержит элемент НЕ,элемент .задержки, переключатель, дватриггера, два элемента И, выход первого...
Линейно-круговой интерполятор
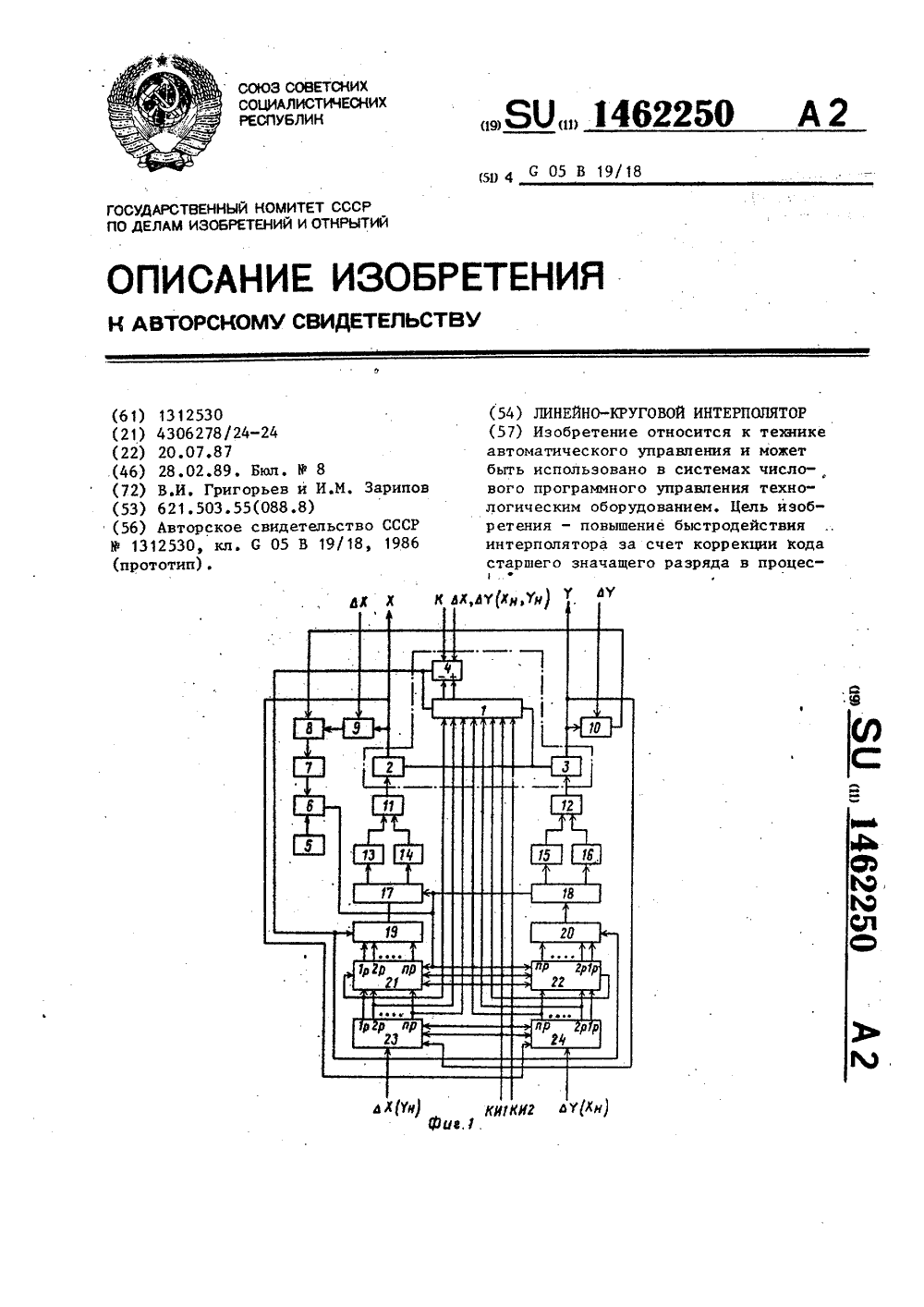
Номер патента: 1462250
Опубликовано: 28.02.1989
МПК: G05B 19/4103
Метки: интерполятор, линейно-круговой
...22 увеличивается на единицу на каждый второй импульс переполнения, При наличии сигнала КИ 2 содержимое накапливающего сумматора 21увеличивается на единицу, а накапливающего сумматора .22 уменьшается наединицу на каждый второй импульс переполнения.Процесс круговой интерполяциизавершается после того, как содержимое счетчиков 9 и 10 обнуляется.Блок 1 коррекции кода нормализации (фиг. 2) работает следующим образом.Код старшего значащего разряда,поступающий из блока 4 нормализации,подключает к выходам мультиплексоров 25 и 26 разряды реверсивных счетчиков 23 и 24, номер которых соответствует номеру старшего значащегоразряда максимальной начальной координаты. При круговой интерполяциисоотношения между координатами могут быть следующими; х )у, х...
Устройство регистрации электрического импульса

Номер патента: 1596256
Опубликовано: 30.09.1990
Авторы: Галиев, Садов, Чернявский, Шестаков
МПК: G01R 29/02
Метки: импульса, регистрации, электрического
...деления первого делителя6 частоты выбирается из расчета обес-,печения с требуемым запасом по времен ни установления текущего адреса записи информации счетчиком 15 адреса.Второй делитель частоты задает временной масштаб импульсов счета интервалов дискретизации.С выхода счетчика 9 значение интервала дискретизаций параллельнымкодом поступает на младшие разрядыинформационных входов блока 11 памя-,ти, на два старших информационныхразряда которого подан двухраэрядныйкод с выхода первого регистра 5 сднига.Командой записи информации в блок11 памяти и в регистр 19 адреса янляется перепад потенциала на выходевычитающего счетчика 18 импульсов приего установке в нулевое состояние.20 Требуемые параметры импульса записиобеспечиваются блоком 20...
Предыдущий патент: Адаптивная система автоматического управления
Следующий патент: Устройство программного управления
Случайный патент: Стенд для динамических испытаний воздушныхвинтов