Адаптивная система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки



Текст
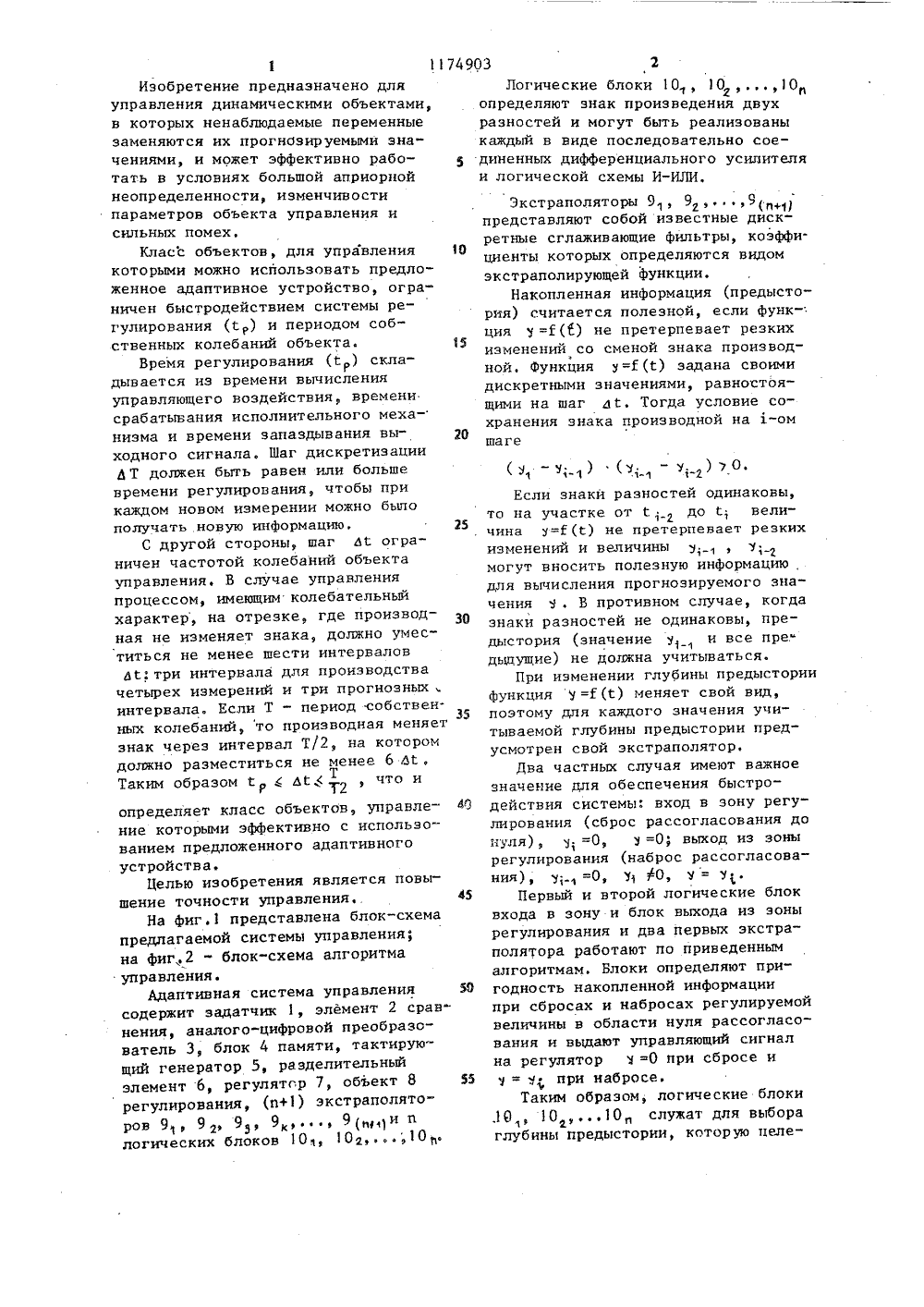
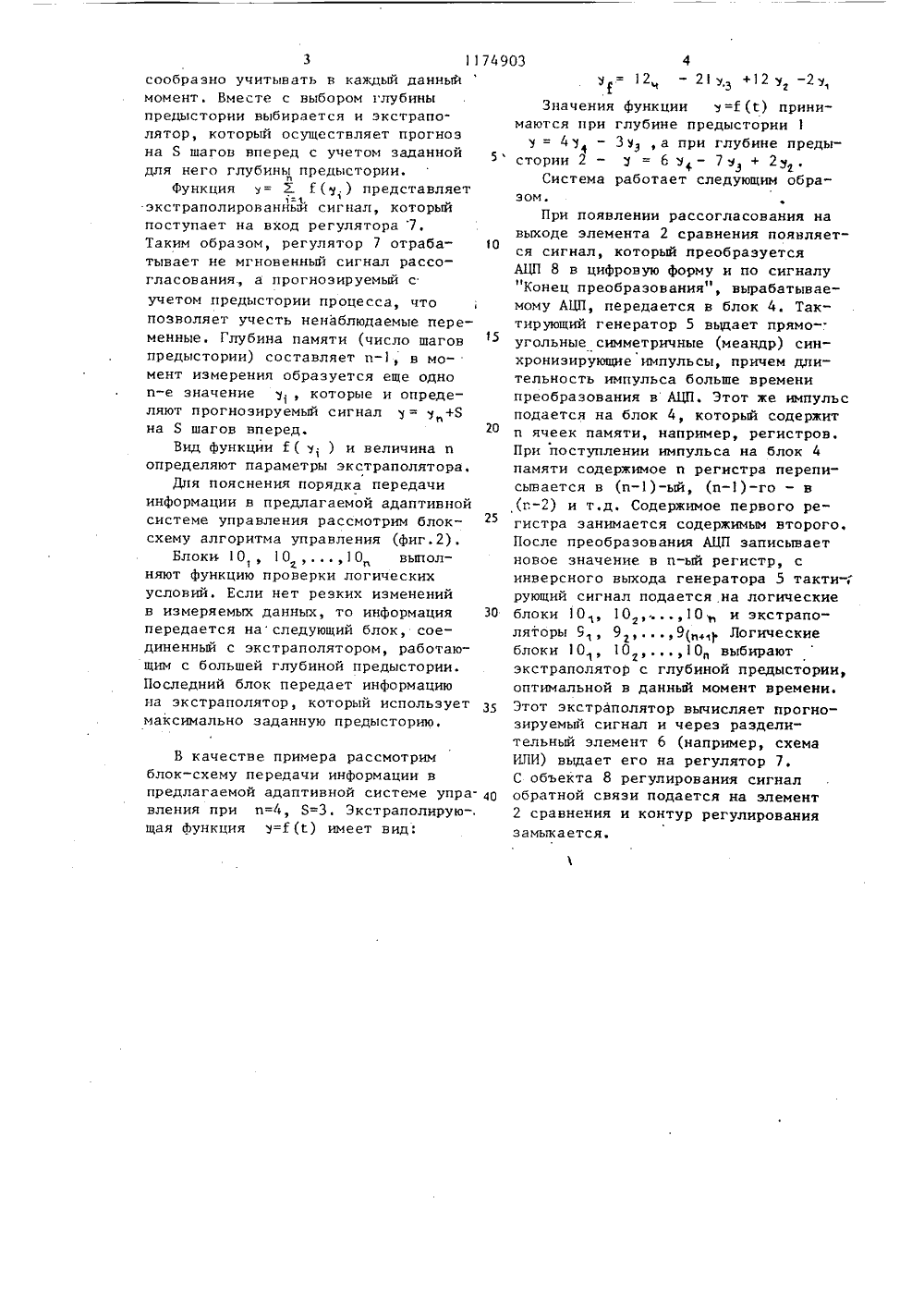
(51) 4 СРОТНРЫТИЙ ИСАНИЕ ТЕНИЯ БР ЕТЕЛЬСТ 1 пуску и машин ГОСУДАРСТВЕННЫЙ НОМИТЕПО ДЕЛАМ ИЗОБРЕТЕНИЙ К АВТОРСКОМУ(7) Научно-производственное объединение по созданию и вьсредств автоматизации горнь(54) (57) АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ, содержащая последовательно.соединенные эадатчик, элементсравнения, аналого-цифровой преоб"разователь и блок памяти, состоящийиэ ячеек памяти, тактирующий генератор, последовательно соединенныеразделительный элемент и регулятор,подключенный выходом к входу объекта регулирования, выход которогосоединен с вторым входом элементасравнения, н (и+) экстраполяторов,отличающаяся тем, что,с целью повышения точности управле-.ния, в нее введены и логическихблоков, причем информационный вход первого логического блока соединенс первым выходом блока памяти,управляющий вход первого экстраполятора соединен с управляющимвходом первого логического блока ис первым выходом тактирующего генератора, второй вход которого соединен с вторыми входами аналогоцифрового преобразователя, и блокпамяти, второй выход которого соединен с первым информационным входом второго логического блока,второй информационный вход которогосоединен с первым выходом первогологического блока, первый, второйи третий информационные входы К-го(К ) 2) логического блока соединенысоответственно с (К)-.(К-)- иК-ым выходами блока памяти, а четвертый информационный вход К-гологического блока соединен с первым выходом (К)-го логическогоблока, информационный вход каждогоК-го экстраполятора соединен соответственно с вторым выходом каждогоК-го логического блока, а информационный вход (и+1)-го экстраполятора соединен с первым выходом и-гологического блока, выходы всех(и+1)-ых экстраполяторов соединеныс соответствующими входами разделительного элемента.1174903 1Изобретение предназначено дляуправлении динамическими объектами,в которых ненаблюдаемые переменныезаменяются их прогнозируемыми зна"чениями, и может эффективно работать в условиях большой априорнойнеопределенности, изменчивостипараметров объекта управления исильных помех,Класс объектов, для управлениякоторыми можно использовать предложенное адаптивное устройство, ограничен быстродействием системы регулирования (г. ) и периодом собственных колебаний объекта.Время регулирования (г. ) склаРдывается из времени вычисленияуправляющего воздействия, временисрабатывания исполнительного механизма и времени запаздывания выходного сигнала, Шаг дискретизацииЛ Т должен быть равен или большевремени регулирования, чтобы прикаждом новом измерении можно былополучать новую информацию,С другой стороны, шаг й ограничен частотой колебаний объектауправления, В случае управленияпроцессом, имеющим колебательныйхарактер, на отрезке, где производная не изменяет знака, должно уместиться не менее шести интерваловдС: три интервала для производствачетырех измерений и три прогнозных,интервала. Если Т - период собственных колебаний, то производная меняетзнак через интервал Т/2, на которомдолжно разместиться не менее б М ,Таким образом йР ( М (, , что иТопределяет класс объектов, управление которыми эффективно с использованием предложенного адаптивногоустройства,Целью изобретения является повышение точности управления.На фиг.1 представлена блок-схемапредлагаемой системы управлении;на фиг,.2 - блок-схема алгоритмауправления.Адаптивная система управлениясодержит задатчик 1, элемент 2 сравнения, аналого-цифровой преобразователь 3, блок 4 памяти, тактирующий генератор 5, разделительныйэлемент б, регулятор 7, объект 8регулирования, (п+1) экстраполяторов 9 р 92 у 95 у 91 е еь 9 (ьу 1 илогических блоков 10,0109,. Логические блоки 10, 10210 я определяют знак произведения двух разностей и могут быть реализованы каждый в виде последовательно соединенных дифференциального усилителя и логической схемы И-ИЛИ,Экстраполяторы 9, 92,.,9(+1представляют собой известные дискретные сглаживающие фильтры козффи 9циенты которых определяются видомэкстраполирующей функции.Накопленная информация (предыстория) считается полезной, если функция У =Й(б) не претерпевает резкихизменений со сменой знака производной. Функция у =Й(С) задана своимидискретными значениями, равностоящими на шаг д 1. Тогда условие сохранения знака производной на 1.-омшаге( У У )(У У 2) 7 О.Если знаки разностей одинаковы,25то на участке от Сдо С; вели 1-2чина у=Я (С) не претерпевает резкихизменений и величины у, , У; 2могут вносить полезную информацйюдля вычисления прогноэируемого значения У . В противном случае, когдазнаки разностей не одинаковы, предыстория (значение уи все пре.дыцушие) не должна учитываться.При изменении глубины предысториифункция У =Й(й) меняет свой вид,35 поэтому для каждого значения учитываемой глубины предыстории предусмотрен свой экстраполятор,Два частных случая имеют важноезначение для обеспечения быстро 4 О действия системы: вход в зону регулирования (сброс рассогласования донуля) У- 0 у - 0 Выход из зонырегулирования (наброс рассогласования), у;=О, У ФО, У =45 Первый и второй логические блоквхода в зону и блок выхода из эонырегулирования и два первых экстраполятора работают по приведеннымалгоритмам. Блоки определяют при 58 годность накопленной информациипри сбросах и набросах регулируемойвеличины в области нуля рассогласования и выдают управляющий сигнална регулятор м 0 при сбросе и55 У = Упри набросе.Таким образом, логические блоки.10, 10 10 служат для выбораглубины предыстории, которую целе1174903 сообразно учитывать в каждый данный момент. Вместе с выбором глубины предыстории выбирается и экстраполятор, который осуществляет прогноз на Б шагов вперед с учетом заданной для него глубины предыстории.пФункция у= : Г(у.) представляет экстраполированнйи сигнал, который поступает на вход регулятора 7, Таким образом, регулятор 7 отрабатывает не мгновенный сигнал рассогласования., а прогнозируемый с учетом предыстории процесса, что позволяет учесть ненаблюдаемые переменные. Глубина памяти (число шагов предыстории) составляет и, в момент измерения образуется еще одно и-е значение у 1, которые и определяют прогноэируемый сигнал у = у +Бь на Я шагов вперед.Вид функции Е( у; ) и величина и определяют параметры экстраполятора,Для пояснения порядка передачи информации в предлагаемой адаптивной системе управления рассмотрим блоксхему алгоритма управления (фиг.2).Блоки 1 О 1 О 10 выполняют функцию проверки логических условий. Если нет резких изменений в измеряемых данных, то информация передается на следующий блок, соединенный с экстраполятором, работающим с большей глубиной предыстории. Последний блок передает информацию на экстраполятор, который использует максимально заданную предысторию. В качестве примера рассмотрим блок-схему передачи информации в предлагаемой адаптивной системе управления при и=4, 8=3, Экстраполирую-, щая функция у=1(г.) имеет вид: 412 - 21 у, +12 у -2 уч 3Значения функции у =Г (С) принимаются при глубине предыстории 1- 4 у - 3 у, а при глубине предыстории 2 - у = 6 у - 7 у + 2 уз гСистема работает следующим образом.При появлении рассогласования навыходе элемента 2 сравнения появляет Ося сигнал, который преобразуетсяАЦП 8 в цифровую форму и по сигналу"Конец преобразования", вырабатываемому АЦП, передается в блок 4. Тактирующий генератор 5 выдает прямо-.15 угольные симметричные (меандр) синхронизирующие импульсы, причем длительность импульса больше временипреобразования в АЦП. Этот же импульсподается на блок 4, который содержити ячеек памяти, например, регистров,При поступлении импульса на блок 4памяти содержимое и регистра переписывается в (и)-ый, (и)-го - в(г,-2) и т.д, Содержимое первого регистра занимается содержимым второго,После преобразования АЦП записываетновое значение в и-ый регистр, синверсного выхода генератора 5 такти-;рующий сигнал подается на логические 30 блоки 1 О 1, 10 ,; ,10 , и зкстраполяторы 9, 9 9(+1. Логическиеблоки 10., 10 1 О выбираютэкстраполятор с глубиной предыстории,оптимальной в данный момент времени, 35 Этот экстраполятор вычисляет прогнозируемый сигнал и через разделительный элемент 6 (например, схемаИЛИ) выдает его на регулятор 7,С объекта 8 регулирования сигнал 40 обратной связи подается на элемент2 сравнения и контур регулированиязамыкается.1174903 Составитель П.КудрявцевТехред Т.Дубинчак Корректо кс имишинец едактор Л.Гратил акаэ 5185 одписное иал ППП "Патент", г. Ужгород, ул. Проектная, 4 49 Тираж 8 ВН 11 ИПИ Государствепо делам иэобрет 13035, Москва, Ж 3 Пного комитета СССРний и открытий5, Раушская наб., д.
СмотретьЗаявка
3618035, 11.07.1983
НАУЧНО-ПРОИЗВОДСТВЕННОЕ ОБЪЕДИНЕНИЕ ПО СОЗДАНИЮ И ВЫПУСКУ СРЕДСТВ АВТОМАТИЗАЦИИ ГОРНЫХ МАШИН "АВТОМАТГОРМАШ"
ЛЕВИТАН МАРК ЕВСЕЕВИЧ, СИЛАЕВ ВИКТОР ИВАНОВИЧ, ГУТМАН ГЕНРИ НИКОЛАЕВИЧ
МПК / Метки
МПК: G05B 17/00
Метки: адаптивная
Опубликовано: 23.08.1985
Код ссылки
<a href="https://patents.su/5-1174903-adaptivnaya-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Адаптивная система управления</a>
Система автоматического управления мощностью энергоблока

Номер патента: 1006787
Опубликовано: 23.03.1983
МПК: F01K 13/02
Метки: мощностью, энергоблока
...18 статического управления котлом и регулятора 19 давления пара перед турбиной с входом задатчика 1 нагрузки котла, а выход .турбинного регулятора 7 мощности с входом механизма 5 управления турбиной. Один вход логического блока 22 соединен с выходом быстродействующего статического ограничителя 14 мощности, а другой вход подключен к одному из выходов блока 17 противоаварийной автоматики. Дополнительно система содержит второй блок 23 памяти, выход которого соединен с входом ограничителя 14 мощности, а входы соединены с выходом блока 17 противоаварийной автоматики и датчиком 8 положения регулирующих клапанов турбины, и датчик 24 давления пара в регулирующей ступени турбины (вместо него может быть предусмотрен датчик...
Измеритель девиации частотных сигналов

Номер патента: 1352389
Опубликовано: 15.11.1987
Авторы: Давыдов, Колесников, Приходько, Торопов
МПК: G01R 23/00
Метки: девиации, измеритель, сигналов, частотных
...Импульс с первого выхода блока 2 управления (фиг.З,в переводит триггер 4 из нулевого в единичное состояние. Триггер 4 открывает вентиль 5 и пропускает на счетчик 6 импульсы опорной частоты Р с 40 генератора 7 опорной частоты. По окончании периода Т; с выхода блока 1 формирования входного сигнала на первый вход блока 2 управления пос тупает второй импульс, который, 4 Б проходя навход триггера 4, переводит его в нулевое состояние, закрывая вентиль 5. К этому времени в счетчике 6 будет записан код Мт =Р, Т, пропорциональный периоду частоты входного сигнала. После этого с вто. рого выхода блока 2 управления (фиг.З,е),проходит импульс на третий вход блока 8 деления, при поступлении которого производится запись кода И,. в сдвигающий...
Устройство для приема многочастотных сигналов

Номер патента: 611305
Опубликовано: 15.06.1978
Авторы: Зайцев, Комиссаров, Кошаев, Кравченко
МПК: H04B 7/08
Метки: многочастотных, приема, сигналов
...блох б подключен к входу блока 8 усреднения сигнала, выход этого блбка соединен с управляющим входом блока 9 автоматической коррекции усиления, к информационному входу которогоподключен выход частотного демодулятора 5, а выходы аналого-цифрового преобразователя 10 через нычитающий блокподключены к информационным входамселектора 2 и дополнительного ключевого блока б,Устройство работает следующим обраом еЮНа селектор 2 на интервале каждоготакта поступают комбинации, определяемые сигналом и шумом с выхода частотного демодулятора 5, причем чем большеуровень сигнала, тем меньше циФроваявеличина комбинации. Возможны случаиложного выбора канала с одним шумом,поскольку функции распределения шумаи сигнала с шумом перекрываются.По результатам...
Устройство для контроля блоков коррекции ошибок в памяти

Номер патента: 951407
Опубликовано: 15.08.1982
МПК: G11C 29/00
Метки: блоков, коррекции, ошибок, памяти
...второй вход третьей схемысравнения подключен к выходу второй схемы сравнения, первый и второйвход которой подключены соответственно к выходу первого шифратора ико второму выходу дешифратораСхема устройства представленана чертеже.Устройство содержит информационный регистр 1 и регистр контрольныхразрядов 2, коммутатор 3, шифраторы11 и 5 схемы сравнения 6, 7 и 8,дешифратор 9, блок управления 10и накопитель 11.Уст рой ст во работа ет следующим образом,В режиме записи блок управления10 разрешает прохождение церез коммутатор 3 на входы шифратора чинформационных сигналов, хранимых в информационном регистре ), одновременно эти информационные сигналы подаются на входы накопителя 11(на выход устройства). Шифратор формирует контрольные...
Устройство для записи и воспроизведения информации из блоков оперативной памяти с коррекцией ошибки

Номер патента: 974410
Опубликовано: 15.11.1982
МПК: G11C 29/00, G11C 7/24
Метки: блоков, воспроизведения, записи, информации, коррекцией, оперативной, ошибки, памяти
...различным путем. Обору дование генератора, задействованное для генерации битов 50, 51, 52, 53, 54, 5, 56, 57 при прямой подаче информации и кода Хэмминга на вход генератора, генерирует соответственно биты 54, 55, 56 57, 50, 51 52, 53.при подаче той же информации и кода Хэмминга с кольцевым сдвигом.Результаты обеих генераций должны совпадать, если соответствуюшее оборудование функционирует правильно.Сравнение результата генераций осуществляется в блоке сравнения синдромов 13. Скорректированная информация, записанная в регистр 19, поступает иа первый вход контрольной схемы сравнения 16. На третий вход через селектор 15 поступает скорректированный побайтный паритет сообщения. На второй вход через второй элемент И 10 из регистра 1...
Предыдущий патент: Адаптивная система управления
Следующий патент: Устройство для управления разгоном и торможением двигателя
Случайный патент: Привод валков бесшпиндельной прокатной клети