Адаптивная система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1174902
Автор: Москаленко

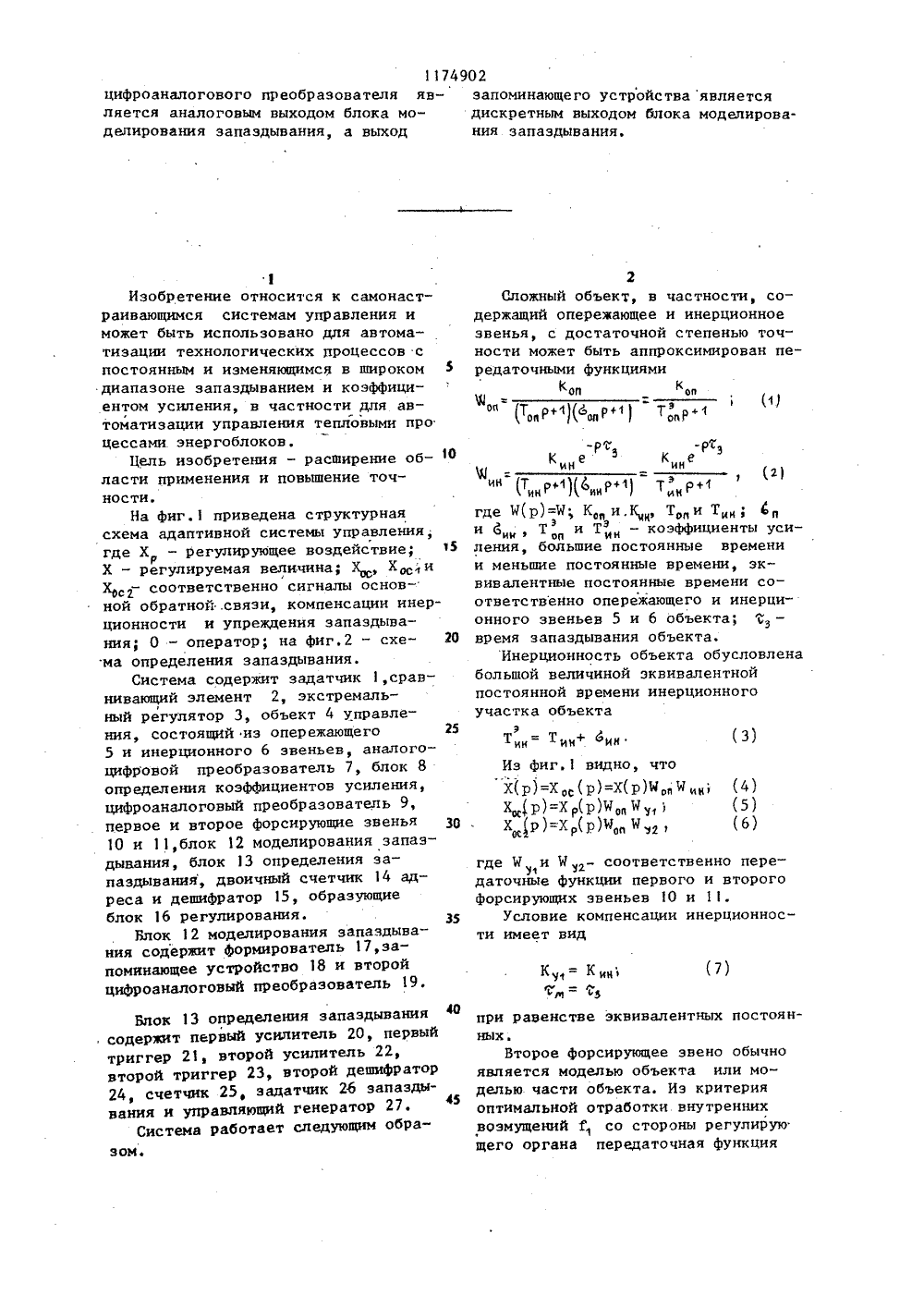



Текст
(19) (1 1)4 005 В 13 НЫЙ КБРЕТЕНИ ТЕТ СССРИ ОТКРЫТИЙ ГОСУДАРСТВЕПО ДЕЛАМ И уг(71) Белорусский орденКрасного Знамени политинститут(56) Авторское свидетелУ 648947, кл. С 05 В 1Авторское свидетельФ 1015336, кл,О 05 В 1 рудового ническ ьство СССР /02, 1979, тво СССР /02, 1980 . ова(54) (57) 1.АДАПТИВНАЯ СИСТЕМА УПРАВ -ЛЕНИЯ, содержащая последовательносоединенные задатчик, сравнивающийэлемент и экстремальный регулятор,подключенный выходом к входу объекта управления, состоящего из последовательно соединенных опережающего и инерционного звеньев, аналого-цифровойпреобразователь, соединенный первымвходом с выходом объекта управления,последовательно соединенные блокопределения коэффициентов усиления,первый цифроаналоговый преобразователь и первое Форсирующее звено, подключенное вторым входом к выходуопережающего звена объекта и к первому входу второго Форсирующего звена, соединенного вторым входом с первым входом первого Форсирующего звена, прнчем второе форсирующее звено соединено выходом с вторым входом сравнивающего элемента, третийи четвертый входы которого подключены соответственно к выходу объектауправления и к аналоговому выходублока моделирования запаздывания,о т л и ч а ю щ а я с я тем, что,с целью расширения области примене -ния и повышения точности, в неевведены блок определения запазды -вания, двоичный счетчик адреса идешифратор, подключенный выходом кшине сброса двоичного счетчика адреса, информационные выходы которогосоединены с первым выходом блокаопределения запаздывания и первымвходом блока моделирования запаздывания, второй вход которого подключенк выходу двоичного счетчика адресаи первому входу дешифратора, соединенного вторым входом с вторым входомблока определения запаздывания, аналоговый выход блока моделированиязапаздывания подключен к. первому вхду блока определения запаздывания,второй вход которого соединен с выходом объекта управления, дискретный выход блока моделирования запаздывания подключен к второму входу блока определения коэффициентов, выход аналого-цифрового преобразователя соединен с третьим входом блока моделирования запаздывания, а выход первого форсирующего звена соединен с вторым входом аналого-цифрового преобразователя.2, Система по п 1, о т л и ч а ющ а я с я тем, что блок моделиро ния запаздывания содержит последовательно соединенные формирователь, запоминающее устройство и второй цифроаналоговый преобразователь, причем вход Формирователя является первым входом блока моделирования запаздывания, второй и третий входы запоминающего устройства являются соответственно вторым и третьим входами блока моделирования запаздывания, выход второг1Изобретение относится к самонастраивающимся системам управления иможет быть использовано для автоматизации технологических процессов спостоянным и изменяющимся в широкомдиапазоне запаздыванием и коэффициентом усиления, в частности для автоматизации управления тепловыми процессами энергоблоков,Цель изобретения - расширение области применения и повышение точности.На Фиг,1 приведена структурнаясхема адаптивной системы управления;где Х - регулирующее воздействие; 5Х - регулируемая величина; Х , ХосиХ- соответственно сигналы основной обратной .связи, компенсации инерционности и упреждения запаздывания; 0 - оператор; на фиг.2 - схема определения запаздывания.Система содержит задатчик 1,сравнивающий элемент 2, экстремальный регулятор 3, объект 4 управления, состоящий из опережающего 255 и инерционного 6 звеньев, аналогоцифровой преобразователь 7, блок 8определения коэффициентов усиления,цифроаналоговый преобразователь 9,первое и второе форсирующие звенья З 010 и 11,блок 12 моделирования запаздывания, блок 13 определения запаздывания, двоичный счетчик 14 адреса и дешифратор 15, образующиеблок 16 регулирования.35Блок 12 моделирования запаздывания содержит формирователь 17,запоминающее устройство 18 и второйцифроаналоговый преобразователь 19. 2Сложный объект, в частности, содержащий опережающее и инерционное звенья, с достаточной степенью точности может быть аппроксимирован передаточными функциями1 оп кап(Т р+1)(р+1) т э р+1и 6 , Т и Т- коэффициенты уси - ления, большие постоянные времени и меньшие постоянные времени, эквивалентные постоянные времени соответственно опережающего и инерционного звеньев 5 и 6 объекта;время запаздывания объекта.Инерционность объекта обусловлена большой величиной эквивалентной постоянной времени инерционного участка объектаэТин= Тин+ ин (3) Иэ Фиг, видно, чтоХ(р)=Х,(р)=Х(р)1, 1 и (4) Хк 1 Р)=Хр(Р)о, 11 у(5)р)=Хр(РЖОВ уг ) (6) где У и У- соответственно переУ 1даточные функции первого и второго форсирующих звеньев 1 О и 11,Условие компенсации инерционности имеет видБлок 13 определения запаздывания40 содержит первый усилитель 20, первый триггер 21, второй усилитель 22, второй триггер 23, второй дешифратор 24 счетчик 25 задатчик 26 запазды 45 вания и управляющий генератор 27,Система работает следующим обрапри равенстве эквивалентных постоянных,Второе форсирующее звено обычно является моделью объекта или моделью части объекта. Из критерия оптимальной отработки. внутренних возмущений й, со стороны регулирую. щего органа передаточная функция зом. 1174902цифроаналогового преобразователя яв- запоминающего устройства является ляется аналоговым выходом блока мо- дискретным выходом блока моделироваделирования запаздывания, а выход ния запаздывания.74902 4 5 1 О 15 20 25 где Ки Т - коэффициент усиления,и время изодрома ПИ - регулятора.В исходном состоянии системой произведена отработка задания, поступающего с задатчика 1. При этом в30 блоке 13 определения запаздывания фиксируется код времени запаздыва - ния для модели 12 запаздывания. Этот код задает цикл работы блоку 16 ре - гулирования, формирующему с помощью двоичного счетчика 14 адреса и дев З 5 шифратора 15 соответствия набор адресов для запоминающего устройства 18 блока 12. Работа двоичного счетчика 14 адреса синхронизирует - ся с работой запоминающего устройст ва 18 импульсами выхода опорной частоты блока 13 определения запаздывания. В результате в каждом цикле по адресу, сформированному в двоичном счетчике 14, через формирова- тель 17 производится считывание информации, относящейся к моменту времени (1 - т ), которая через цифро- аналоговый преобразователь 19 подается на второй (суммирующий) вход сравнивающего элемента 2, По окончании считывания в запоминающее устройство 18 по этому адресу записы - .вается новая информация, поступающая на его информационные входы с 55 з 11 второго форсирующего звена 11 может быть выбрана, например, равной коэффициенту усиления инерционного участка 6 объекта, т.е. 12= Кин= Ку 1(8)Таким образом, адапгивная подстройка параметров си темы должна производиться в соотвегствии с выражениями (7) и (8). При этом все неточности моделирования запаздывания, различные изменения объекта при эксплуатации и несоответствие эквивалентных постоянных времени относятся к несовпадению их коэффициентов усиления.Параметры собственно регулятора 3 могут быть оптимизированы, например, исходя из известного компенса - ционного метода, при которомэТоп (9)К2 КТ= Т (10) выходов аналого-цифрового преобразователя 7. При следующем импульсе с выхода опорной частоты блока 13 определения запаздывания аналогичным образом по очередному адресу считывается информация, относящаяся к моменту времени (1 -г ) + Т 11113, и т.д. до ( - Г,) + "1 = , после чего начинается следующий (1+1)-й цикл.В блоке 13 определения запаздывания измеряется величина запаздывания Т, объекта для блока 12 по формулеФгъь = ь 1 гм м 1,п ЭО,1-Э или(,а м (п 1 "М 1 оп 1 "м(п1где 5 - величина запаздывания, установленная оператором в счетчике 25через задатчик 26 перед началомработы; (и) и (и) - предыдущий иочередной циклы адаптации; М - модель,В блоке 13 определяется изменениезначений , =, Тм и на его выходефиксируется новое значение временизапаздывания, Это, в свою очередь,приводит к изменению текущего коэффициента пересчета двоичного счетчика 14 адреса, аследовательно, времел"мБлок 7 определения коэффициентовкак в статике,так и в динамике, счастотой работы аналого-цифровогопреобразователя 7 находит значение коэффициентов усиления формирующих звеньев 10 и 11, которые подстраиваются через первый цифроаналоговый преобразователь 9. При этомв динамике за счет непрерывнойадаптивной подстройки учитываютсявсе различия между объектом и моделью. При изменении задания, при подаче единичного скачка или при возмущении работа системы осуществляется по трем контурам, причем система сохраняет высокое быстродействие и качество работы, так как обеспечивается условие ее адаптации к измене. нию времени запаздывания и коэффициента усиления, являющихся основными параметрами объекта, независимо от причин, которые их вызывают.174902 аказ 5185/49ВНИИПИ Госу Тираж 863дарственного комиизобретений и отва, Ж - 35, Раушск Подпета СССРрытийя наб.,о по делам 113035, Мос
СмотретьЗаявка
3614125, 04.07.1983
БЕЛОРУССКИЙ ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ
МОСКАЛЕНКО АЛЕКСЕЙ АНИСИМОВИЧ
МПК / Метки
МПК: G05B 13/02
Метки: адаптивная
Опубликовано: 23.08.1985
Код ссылки
<a href="https://patents.su/5-1174902-adaptivnaya-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Адаптивная система управления</a>
Блок записи временных сигналов для запоминающих устройств

Номер патента: 640684
Опубликовано: 30.12.1978
Авторы: Андраш, Габор, Иштван, Карой, Петер
МПК: G11C 7/00
Метки: блок, временных, записи, запоминающих, сигналов, устройств
...дикатор, преобразователь кодов, блок временного запуска, модулируемый генератор, счетчик один из входов которого подключен к шине минутных сигналов, и шину часовых сигналов 21Недостатками известного блока являются малая точность и невысокая надежность.Целью изобретения является повышение точности и надежности блока. записи.Для достижения поставленной цели выход блока временного запуска соединен с другим входом счетчика,640684 Формула изобретения Подпи ираж 6 ЦНИИПИЗаказ 7013/5 илиал ППП фПатентф, г, Ужгород, ул. Проектна один из выходов которого через индикатор соединен с шиной часовых сигналов, а другой выход счетчика соединен с преобразователем кодов, подключенным к модулируемому генератору, связанному с выходом блока.Изобретение...
Устройство для моделирования цифровых объектов

Номер патента: 898438
Опубликовано: 15.01.1982
Автор: Сечкин
МПК: G06F 15/20
Метки: моделирования, объектов, цифровых
...которого является пятым вы" ходом блока управления, шестой выход которого подключен к шестому выходу 55 генератора управляющих сигналов. Устройство работает следующим образом.46 Перед началом моделирования заданного цифрового объекта в состав наборного поля 1 включается тот набор интегральных схем, который используется в объекте, Подключение интегральных схем осуществляется с ,помощью специальных колодок, выводы которых имеют электрический контакт с выводами микросхем и жестко соединены с общиии магистралями соответствующих переключателей 11. Переключатели 11 имеют общую магистраль, которая может использоваться как для ввода, так и для вывода информации, а также информационный вход,55 выход и управляющий вход, с помощью которого...
Устройство для моделирования объектов с распределенными параметрами

Номер патента: 1043660
Опубликовано: 23.09.1983
МПК: G06G 7/46
Метки: моделирования, объектов, параметрами, распределенными
...6, работающегов фазоимпульсном режиме, элемента ИЛИ-НЕ 7, КБ-триггера 8, элемента. 2 И-ИЛЙ 9, счетчика 10, а такке тактовые входы 11 и 12 и вход13 устройства,Генератор 4 используется дляформирования с периодом Т развертывающего напряжения Бф(С), формакоторого определяет характер моделируемой нелинейности д(ур) (фиг,3).В качестве блока 4 может быть использован последовательно соединенный генератор пилообразного напряжения, синхронизированный сигналом, подаваемым на .тактовый вход11 устройства и блок нелинейности,например диодный, функциональныйпреобразователь (не показаны).Перед началом работы устройствасчетчик 10 сбрасывается в нульпутем подачи наего вход 14 импульсасброса Ко.Работа устройства начинаетсяс подготовительного периода, в...
Устройство для моделирования размещения плоских геометрических объектов

Номер патента: 1200295
Опубликовано: 23.12.1985
МПК: G06N 1/00
Метки: геометрических, моделирования, объектов, плоских, размещения
...тринадцатого триггера, единичный выходкоторого соединен с вторым входомшестнадцатого элемента И, выход которого через тринадцатый формирователь импульса соединен с управляющимвходом второго блока коммутации, нулевым входом тринадцатоготриггера и единичным входом четырнадцатого триггера, единичный выход которого соединен с вторым входом семнадцатого элемента И, выходкоторого через четырнадцатый формирователь импульса соединен с нулевым входом четырнадцатого тригге1200295ра и вторым входом восемнадцатогоэлемента И, выход которого черезпятнадцатый формирователь импульса соединен с входом сброса счетчикаперебора элементов а,п-мерного поляразмещения объекта, и-кратный выходкоторого соединен с вторыми входами вторых элементов И ячеек...
Система управления объектом с несколькими управляющими входами

Номер патента: 1287105
Опубликовано: 30.01.1987
Авторы: Авдеев, Киселев, Мышляев, Попов, Соловьев
МПК: G05B 13/04
Метки: входами, несколькими, объектом, управляющими
...с выхода первого источника 15 постоянного сигнала. Полученный сигнал о величине И(С) контролируемого возмущения с выхода первого элемента 16 сравнения подается на первый вход блока 18 умножения, где умножается на коэффициент К (С), сигнал о котором поступает на второй вход этого блока умножения с выхода блока 17 адаптации. В результате на выходе блока 18 умножения формируется сигнал о величине ьц (С) изменения интегрального значения общего управляющего воздействия, необходимого для компенсации тт(С)дЦ (С) : К (с)ьт(с)., (6) выходов соответственно четвертого 40и первого 16 элементов сравнения, поформуле 11 дц В.-К,ОУ,ф1 У 1 дВ 7 -Я у+ 1 т(е-.) 40 45 50 55 7 1 3-й порции материала в объекте управления,Сигнал у(С) об усредненном...
Предыдущий патент: Адаптивная система регулирования многомерного объекта
Следующий патент: Адаптивная система управления
Случайный патент: Операционный стол для лор-операций