Устройство для управления адаптивным роботом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 881669
Авторы: Бердиев, Виноградов, Жаботинский
Текст
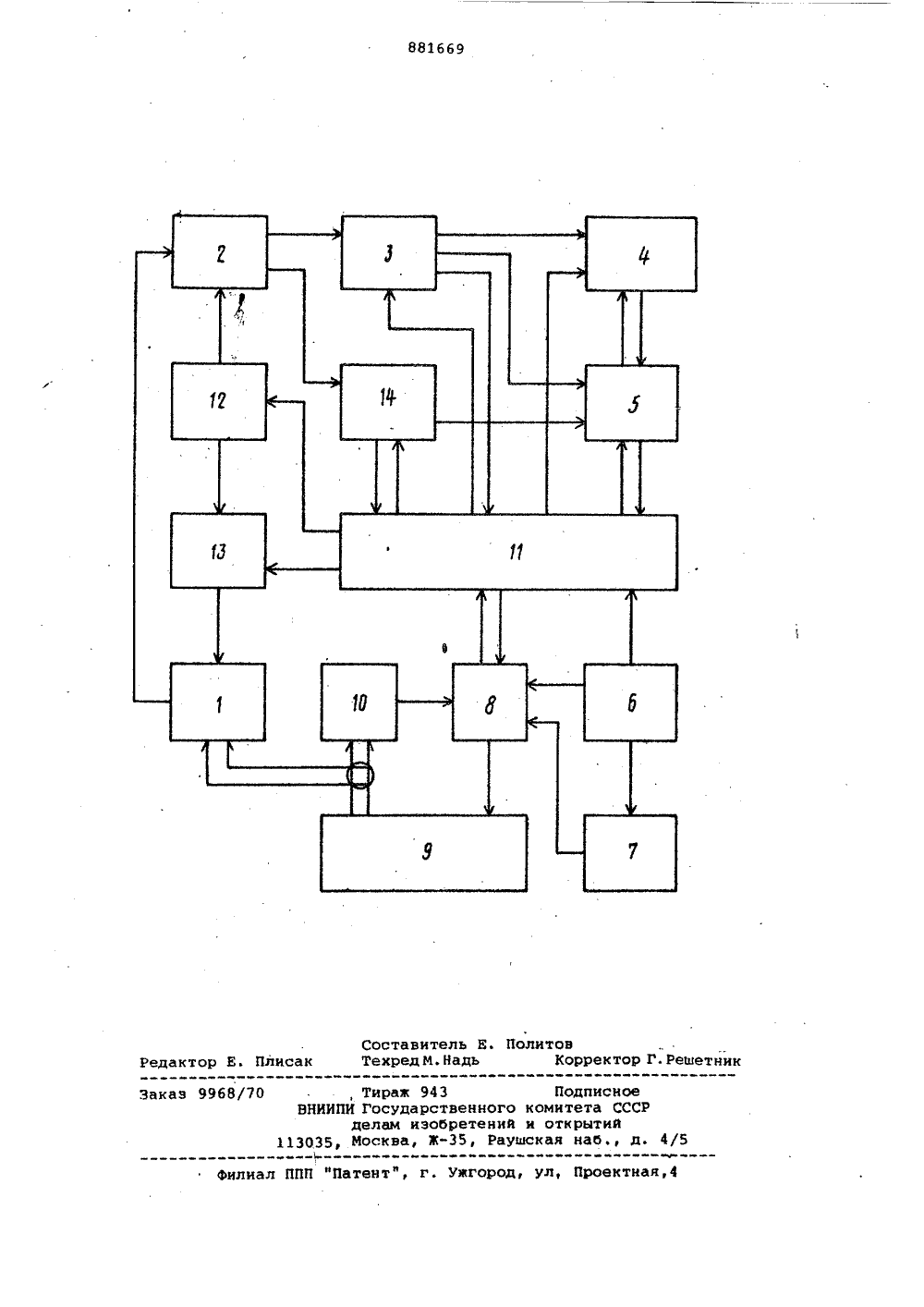
ОПИСАНИЕ ИЗОБРЕТЕНИЯ Союз Советских Социалистических Республик(22) Заявлено 18. 03, 80 (21) 2895274/18-24с присоединением заявки Йо(23) ПриоритетОпубликовано 15.1181, Бюллетень Йя 42 0 05 В 19/00В 25 4 9/00 Государствепный комитет СССР по делам изобретений и открытийЗаявитель инский авиацион 54) УСТРОЙСТВО а и 0 кооду 3Изобретение относится к робототехнике и может быть использовано для управления адаптивными роботами при автоматизации производственных процессов.Известно устройство для управления адаптивным роботом, содержащее блок ввода изображения, блок управления, логический блок и приводи исполнительного органа 1.Однако устройство имеет узкие функциональные возможности.Наиболее близким техническим решением к изобретению является устройство, содержащее последовательно соединенные коммутатор команд, блок памяти, блок формирования сигналов перемещения, приводы и датчики положения исполнительного органа, выходы которых подключены ко вторым входам блока формирования сигналов перемещения, а также последовательно соединенные блок управления, блок формирования прямоугольного растра, коммутатор раэверток и блок ввода изображения, установленный на схва" те исполнительного органа, причем первый вход блока управления подключен ко второму выходу коммутатора манд, второй вход - к первому вых технологический институт ПРАВЛЕНИЯ АДАПТИВНЫМ РОБОТ блока памяти, третий вход - ко второму выходу блока формирования сигна лов перемещения, второй выход - к первому входу коммутатора команд, третий выход - ко второму входу блок формирования сигналов перемещен я, а четвертый выход - ко второму входу коммутатора раэверток 21.Недостатками этого устройства являются невозможность определения угла ориентации в случае, если размерыдетали меньше радиуса круговой развертки, и неточность определения угла ориентации : в случае, если деталь имеет пазы или отверстия в местах пересечения круговой развертки с деталью.Цель изобретения - расширение функциональных возможностей устройства,Поставленная цель достигается тем, что устройство содержит дешифратор, сумматор и последовательно соединенные блок вычисления координат крайних точек, блок вычисления размера проекции-и блок сравнения, выход и второй вход которого подключены соответственно ко второму входу и третьему выходу коммутатора команд, а третий вход - к пятому вы 88166960 ходу блока управления, четвертый входи шестой выход которого соединены,соответственно со вторыми выходом ивходом блока вычисления размера проекции, третьим выходом подключенно"го к третьему входу коммутатора ко"манд, второй выход блока памяти черездешифратор соединен с четвертым входом блока формирования сигналов перемещения, первый вход сумматора подключен ко второму выходу блока вычисления координат крайних точек, первыйвыход - к четвертому входу коммутатора команд, а вторые вход и выход - к седьмому выходу и пятомувходу блока управления соответственно, причем выход блока ввода изобракения соединен со вторым входом блока вычисления координат крайних точек.На чертеже представлена Функциональная схема устройства.Устройство содержит блок 1 ввода изображения,блок 2 вычислениякоординат крайних точек, блок 3 вычисления размера проекции, блок 4сравнения, коммутатор 5 команд, блокб памяти, дешифратор 7, блок 8 формирования сигналов перемещения,приводы 9, датчики 10 положения исполнительного органа, блок 11 управления, блок 12 формирования прямоуголь-,ного растра, коммутатор 13 разверток,сумматор 14.Устройство работает следующим образом.Положение детали на рабочей поверхности определяется координатамиее центра тяжести Х, У и угломориентации оси симметрии относительнонекоторой линии отсчета. Вычислениекоординат положения детали на рабочей поверхности начинается с моментапоступления импульса передачи управления иэ блока 8 формирования сигналов перемещения в блок 11 управленияРасположение блока 1 ввода изображения в схвате робота свидетельствуето выходе схвата в центр заданной зоны обзора Вычисление интересующихпараметров осуществляется путем обработки оптической информации о положении детали в зоне обзора, формируемой блоком 1 ввода изображения,Чувствительным элементом блока 1ввода изображения является фотоприемная матрица, на матричное Фоточувствительное поле которой с помощьюобъектива проецируется изображение детали.С началом работы устройства блок11 управления запускает блок 12формирования прямоугольного растра.,Выходные сигналы блока 12 поступаютна вход коммутатора 13 разверток. Под действием сигнала, поступающего из блока 11 управления на вход коммутатора 13 разверток, выходные сигналы блока 12 формирования прямо 10 20 25 ЗО 35 40 45 50 угольного растра через коммутатор 13 раэверток подаются на вход блока 1 ввода изображения. На выходе блока 1 ввода изображения появляется сигнал, логическое значение которого соответствует оптической информации, ,воздействующей на выбранный элемент информационного поля фотоприемнойматрицы, На основании логических значений сигналов, поступающих с выхода блока 1 ввода изображения и с выхода блока 12 формирования прямоугольного растра, блок 3 вычислениякоординат крайних точек вычисляеткоординаты крайних точек положенияобъекта по оси Х. Затем значения координат крайних точек поступают наблок 3 вычисления размера проекциии сумматор 14. Сумматор 14 вычисляетзначение координаты Хс центра тяжестидетали. Блок вычисления размера проекций вычисляет размер проекций дХдетали по оси Х. После окончания вычисления координаты Хс и вычисленияразмера проекций по Х на вход блока11 управления поступают сигналы,свидетельствующие об этом, и блок 11управления через коммутатор 5 командобеспечивает запись информации о координате Хс с выхода сумматора 14 всоответствующие ячейки блока 6 памяти,Значение размера проекции д Хзаписывается в блок 4 сравнения. Послеэтого блок 11 управления переключаеткоммутатор 5 команд и коммутатор 13разверток в режим определения координаты Ус и размера проекции д У по осиУ. Значение Усчереэ коммутатор 5 команд заносится в блок б памяти. Затемв блок 4 сравнение через коммутатор5 команд поступае, значение размерапроекции дУ. По сигналу с блока 11управления проИзводится сравнение величин дХ 1 и дУ. Знак результатасравнения через коммутатор 5 командзаносится в соответствующую ячейкублока б памяти.При захвате детали схватом, имеющим форму плоскопараллельных губок,деталь поворачивается под действиеммомента, создаваемого губками. Уголповорота схвата, необходимый для захвата детали, определяется следующимобразом.После определения Х, Уо и знака (ЬХ-йУ) коммутатор 5 командвырабатывает сигнал, который подается на блок 11 управления. Блок 11управления вырабатывает сигнал, покоторому блок 8 Формирования сигналов перемещения формирует сигнал наприводы 9 для поворота блока 1 вводаизображения на - После полученияА,сигнала от блока 8 формирования сигналов перемещения блоком 11 управления о том, что блок 1 ввода изображения развернут на - 1 блок 114управления вырабатывает сигналы длявычисления дХ, дУ . и нх сравнения.те исполнительного органа, причемпервый вход блока упраэлени нцключен ко второму выходу коммутато,ра команд, второй вход - к первомувыходу блока памяти, третий входвторому выходу блока формированиясигналов перемещения, второй выходк первому входу коммутатора команд,третий выход - ко второму входублока формирования сигналов перемещения, а четвертый выходко второму входу коммутаторараэверток, о т л и ч а ю щ е е с ятем, что, с целью расширения Функциональных возможностей устройства,. оно содержит дешифратор, сумматор и15 последовательно соединенные блок вычисления координат крайних точек,блок вычисления размера проекциии блок сравнения, выход и второй вход,которого подключены соответственноЩ ко второму входу и третьему выходукоммутатора команд, а третий входк пятому выходу блока управления,четвертый вход и шестой выход которого соединены соответственно со25вторыми выходом и входом блока вычисления размера проекции, третьим выходом подключенного к третьему входу.коммутатора команд, второй выход блока памяти через дешифратор соединенс четвертым входом блока Формирования сигналов перемещения, первыйвход сумматора подключен ко второмувыходу блока вычисления координаткрайних точек, первый выход - кчетвертому входу коммутатора команд,а вторые вход и выход - к седьмомувыходу и пятому входу блока управления соответственно, причем выходблока ввода иэображения соединен совторым входом блока вычисления координат крайних точек.Источники информации,прйнятые во внимание при экспертизе Формула изобретения35 Устройство для управления адаптивным роботом, содержащее последовательно соединенные коммутатор команд, блок памяти, блок формирования сигналов перемещения, приводы и датчики 40 положения исполнительного органа,выходы которых подключены ко вторым входам блока Формирования сигналов перемещения, а также последовательно соединенные блок управления, блок 4 формирования прямоугольного: растра, коммутатор разверток и блок ввода изображения, установленный на схваЗнак сравнения (ЬХ - ь У) заносится в соответствующую ячейку блока 6 памяти через коммутатор 5 команд. По сигналу с коммутатора 5 команд иэ блока 6 памяти информация о знаках (ьХ- дУ) и (ьХ- ь У 1) поступает на вход дешифратора 7, На соответствующем выходе дешифратора 7 появляется сигнал, по которому блок 8 формирования сигналов перемещения формирует сигнал на приводы 9 для поворота схвата. Одновременно формируются сигналы на приводы 9 робота для других перемещений по сигналам с блока 6 памяти. После обработки механизмов робота, т.е, после того, как схват будет находиться над центром тяжести детали развернутым на соответствующий угол, подается сигнал на привод сжатия схвата. После захвата детали и разворота схвата в начальное положение на блок 11 управления поступает сигнал с блока 8 формирования сигналов перемещения. По сигналу с блока 11 управления производится вычисление координаты Х в последовательности, укаэанной выше. Повторное вычисление координаты Х необходимо, так как центр тяжести детали смещается при развороте ее в схвате.Применение изобретения позволяет расширить функциональные воэможности адаптивного робота. 1. Авторское свидетельство СССРВ 470791, кл. 8 05 В 15/00, 1976.2. Авторское свидетельство СССРпо заявке 9 2687007/18-24,кл. В 25 ) 9/00, 1978 (прототип).881669 ПолитовКоррек оставительехредМ.Над Решетни Редактор Е. Плиса заказ 9968/7 илиал ППП фПате Ужгород, ул, Проектная,4, Тираж 943 Подписное ВНИИПИ Государственного комитета СССР делам изобретений и открытий 13 О 35, Москва, Ж, Раушская наб., д, 4/5
СмотретьЗаявка
2895274, 18.03.1980
РЫБИНСКИЙ АВИАЦИОННЫЙ ТЕХНОЛОГИЧЕСКИЙ ИНСТИТУТ
БЕРДИЕВ АНАТОЛИЙ САДИЕВИЧ, ВИНОГРАДОВ ИГОРЬ ГЕННАДЬЕВИЧ, ЖАБОТИНСКИЙ ЮРИЙ ДАНИЛОВИЧ
МПК / Метки
МПК: G05B 19/00
Метки: адаптивным, роботом
Опубликовано: 15.11.1981
Код ссылки
<a href="https://patents.su/4-881669-ustrojjstvo-dlya-upravleniya-adaptivnym-robotom.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для управления адаптивным роботом</a>
Устройство формирования путевых команд управления подвижным объектом

Номер патента: 1795956
Опубликовано: 15.02.1993
Автор: Клименко
МПК: B66B 1/36
Метки: команд, объектом, подвижным, путевых, формирования
...шкива трения или барабана (с однослойной и многослойной навивкой, а такжес переменным радиусом навивки) 14,Объем счетчика рассчитан так, что послесброса в одном крайнем положении (фиг.2, 45Ивх= 0) и перемещения сосуда в другое крайнее положение не вход поступает максимальное количество импульсов йвх,макскоторое заполнит счетчик менее чем на половину объема йсч.макс., и один из старших 50разрядов, например, последний; не изменйт своего состояния,Для наладки сосуд устанавливают в заданной точке ствола (например, 12) и производят "сброс" счетчика 3 в граничное, 55например, нулевое состояние. Этого достаточно, чтобы всегда, при движении сосуда содной стороны от заданной точки до одногокрайнего положения, в счетчике, работающем на вычитание...
Устройство для формирования команд телеуправления и телесигнализации

Номер патента: 554551
Опубликовано: 15.04.1977
МПК: G08C 15/06
Метки: команд, телесигнализации, телеуправления, формирования
...определяющей какое положение должен принять вы )бранный автомат. Элементы И 4 разрешают шифрование только тех цепей, в которыхвозникают сигналы несоответствия между наоранной командой и состоянием элементов телссигнализации, а также управляют через элемент ИЛИ 10 работой триггера 11. Шифратором 3 операций управляет распределитель 5 (выполненный ациклическим), для которого вырабатывает управляющие импульсы триггер б. Ациклический распределитель 5 л поочередно подключает для шифрования цепи, которые подготовлены ключами управления 8 (выполненные многопозиционными).С началом нового цикла продвижения пе- Иредающего распрсдс.ппеля 1 импульс Пуск через элемент И 12 с его выхода запускает триггер б, который переключает ациклический...
Устройство для формирования адреса команды

Номер патента: 955062
Опубликовано: 30.08.1982
Авторы: Богумирский, Цыганков, Чернаков
МПК: G06F 9/36
Метки: адреса, команды, формирования
...команд, не являющихся командами передачи управления, адрес текущей команды, находящийся в регистре 1, увеличивается в счетчике 12 (в простейшем случае на единицу) и в последующем такте через коммутатор 13 поступает в регистр 11.При выполнении команд условной передачи управления содержимое одного из регистров 2, номер которого задается в команде и поступает на адресный вход коммутатора 4 с третьего выхода регистра 1, поступает на первый вход схемы 6 сравнения. С четвертого выхода регистра 1 обнуляется счетчик 15 и разрешается выдача импульсов генератором 17, которые подсчитывает счетчик 15. Так как первый выход счетчика 15 соединен с адресным входом коммутатора 14, то на четвертый вход схемы б сравнения начинают последовательно...
Устройство для формирования телеметрических команд

Номер патента: 1005143
Опубликовано: 15.03.1983
Авторы: Бабкин, Бардин, Сибигатулин
МПК: G08C 19/28
Метки: команд, телеметрических, формирования
...4 управляющих сигналов,После этого в регистр 1 заносится код,соответствующий режиму загрузки бло-.ка 9. В этом режиме процессором (на. З 5чертеже не показан) заносится в блок9 таблица телеметрических команд покомандам записи, вырабатываемым вдешифраторе 4 управляющих сигналов,по входным импульсам процессора, подаваемым на вход 11 дешифратора 4.Смена адресов ячеек блока 9 памятиобеспечивается распределителем 5 и дешифратором 4. По окончании загрузки при установке кода в рфгистре 1 на 45считывание соответствующей зонысчетчик 2 адреса блока 9 памяти устанавливается в исходное состояние, соответствующее адресам первых слов, которые должны быть считаны. По этому же коду в распределителе 5 формируются сигналы, обеспечивающие запись...
Устройство для контроля логических блоков

Номер патента: 1228109
Опубликовано: 30.04.1986
Авторы: Кузьмин, Меркуль, Фомич, Фомичев
МПК: G06F 11/26
Метки: блоков, логических
...триггерах 7, Сравнение данных сигналов осуществляется на элементах 9 равнозначности. Сигналом с выхода элемента 19 задержки осуществляются запуск элемента 20 задержки и возбуждение по второму входу элементов И 29 ячеек 2 формирования входных воздействий. Сигналы на выходе элемента ИЛИ 18 в данном случае появляются, если соответствующие тестовые разряды блока 12 памяти установлены в нулевое состоя 5 О 5 го 25 30 ние. Таким образом, осуществляетсяконтроль сигналов на контактах контролируемого блока 1 в статическом ре.жиме, причем проверке подверженытолько сигналы на тех контактах блока 1, которые не проверялись в динамическом режимеСигналом с выходасхемы 20 задержки разрешается возбуждение схемы И 22 в блоке 17 управления и в случае...
Предыдущий патент: Устройство для управления адаптивным роботом
Следующий патент: Устройство для программного управления намоточным станком
Случайный патент: Способ автоматического регулирования теплового режима ректификационной колонны