Устройство формирования путевых команд управления подвижным объектом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1795956
Автор: Клименко



Текст
(19) 111) 1)5 В 66 В 1/36 ГОСУДАРСТВЕННОЕ ПАТЕНТНОЕВЕДОМСТВО СССР1 ГОСПАТЕНТ СССР) Е ИЗОБРЕТЕН СА ОЛИ К ПАТЕН ложения подвижного объекта и соответственно количеству формируемых команд блоки 1 формирования путевых команд; каждый из которых содержит реверсивный счетчик, узел программирования и усилитель. Выход ство СССР датчика 6 путевых импульсов соединен с 6, 1985. входами счета и его направления реверсив- МИРОВАНИЯ ПУ- ных счетчиков, с входами разрешения пред- ЛЕНИЯ ПОДВИЖ- установки которых соединен выход датчика5 конечного положения подвижного объекя: устройствофор- та, с входами предварительной установки - нд управления по- выходы соответствующих узлов 8 програмдержит датчик 6 мирования, а выход старшего разряда 9 иненный с ревер- каждого счетчика 3 - с соответствующими литель 10, узЕ)е 8 усилителями, выход которых. являются вцхоик 5 конечного по- дом устройства, 1 э.п,ф-лы, 2 ил.л(54) УСТР.ОЙСТВО ФОРТЕВЫХ КОМАНД УПРАВНЫМ ОБЪЕКТОМ(57) Сущность изобретенимирования путевых комадвйжнцм объектом сопутевых импульсов, соедсивным счетчиком 3, усипрограммирования, датч Изобретение относится к управлениюподвижными объектами, в частности шахтными подъемными установками.Известно устройство формирования пу, ,тевых команд с использованием бесконтактных датчиков положения валов, связаннцх с приводом подъемной установки, тригге-, ров и схем совпадения, в соответствии с которыми подъемные сосуды располагают,в заданной точке ствола и производят механическую регулировку и. фиксацию элементов датчиков в режиме совпадения.Недостатком его является слОжностьаппаратурной реализации, точность ограничена люфтами кинематических узлов, погрешность регулировки и фиксации элементов.Наиболее близким является устройствоформирования путевых команд, основанное на подсчете с помощью реверсивного счетчика количества импульсов, поступающих от путевых импульсных датчиков перемещения сосудов, и выдаче команд с помощью дешифраторов и триггеров при равенстве фактического количества импульсов с запрограммированным значением, поданным на схему совпадения.Недостатком его является значительная сложность конструкции и наладки.Целью предложенного решения является упрощение реализации.Указанная цель достигается тем, что в него введены датчик конечного положения подвижного объекта и соответственно количеству формируемых команд блоки формирования путввцх команд, каждый из которых содержит реверсивный счетчик, узел программирования и усилитель, причем выход датчика путевых импульсов соединен со входами счета и его направленйяреверсивных счетчиков, со входами разрешения предустановки которых соединен выход датчика конечного положенияподвижного объекта, со входами предварительной установки - выходы соответствующих узлов. программирования, а выходстаршего разряда, каждого счетчика - с соответствующими усилителями, выходы ко. торых являются выходом устройства,10Объем каждого: реверсивного счетчикаМсч.макс и максимально возможное количество входных путевых импульсов Йвх.максдатчика, соответствующее максимальномуперемещению подвижного объекта, находятся в соотношении Мах.макс 0,5 йсч.макс.На фиг.1 представлена структурная схема описываемого устройства; на фиг,2 - диаграммы выходных сигналов блоковформирования двух путевых команд. 20Устройство состоит из ряда независимых блоков формирования путевых команд1,2-п, каждый из которыя содержйт реверсивный счетчик 3 с входом подключения узла сброса в нулевое состояние 4, входом 25.разрешения предустановки от датчика 5 конечного положения сосуда, входами счета иего направления для подключения датчикапутевых импульсов перемещения сосуда 6 ивходами предварительной уСтэновки 7 для 30подключения независимого узла программирования 8, а также с выходами разрядов9, к одному иэ которых, например, последнему старшему разряду, подключен усилитель 10 с прямым и инверсным выходом, 35.Путевая команда формируется на выходеблока 1 при положении подъемного сосуда11 в одной из заданных точек ствола 12, а навыходе. блока 2 - в другой точке ствола 13,Перемещение сосудов осуществляется с помощью шкива трения или барабана (с однослойной и многослойной навивкой, а такжес переменным радиусом навивки) 14,Объем счетчика рассчитан так, что послесброса в одном крайнем положении (фиг.2, 45Ивх= 0) и перемещения сосуда в другое крайнее положение не вход поступает максимальное количество импульсов йвх,макскоторое заполнит счетчик менее чем на половину объема йсч.макс., и один из старших 50разрядов, например, последний; не изменйт своего состояния,Для наладки сосуд устанавливают в заданной точке ствола (например, 12) и производят "сброс" счетчика 3 в граничное, 55например, нулевое состояние. Этого достаточно, чтобы всегда, при движении сосуда содной стороны от заданной точки до одногокрайнего положения, в счетчике, работающем на вычитание или сложение на выходе указанного разряда 9 (например, последнего) и усилителя 10 сохранялось состояние лог, "0", а при движении с другой стороны от заданной точки до другого крайнего положения - состояние лог. "1" (фиг.1), которое используется как путевая команда для управления.. Для формирования команд при положении сосуда в другой заданной точке ствола, например 13, аналогичную операцию производят используя другой блок (2),Так как в процессе работы подъемнойустановки может происходить изменениемакСимальйого количества входных импульсов (например, при вытяжке канатов илипри проходке и углублении ствола), тоцелесообразно в конечном положенииподвижного объекта по сигналу от соответствующего датчика 5 конечного положениясосуда производить предустановку счетчи-.ка 3 е то же состояние, которое он имелпосле выполнения операции "сброс" и перемещении сосуда в крайнее положение.Для упрощения программирования не-.обходимо при заблокированном входе разрешения предустановки от датчика 5 послевыполнения операции "сброс" в заданномположении сосуда и перемещения в край-.нее положение определить с помощью индикатора (например светодиодного)состояние выхода каждого разряда 9 в счетчике 3 и установить. с помощью узла программирования 8 такие же состояния насоответствующем каждому разряду входе 7предварительной установки. После этогоразблокировать вход разрешения предуста-новки. "Сброс" счетчика в нулевое состояние может производиться как поотдельному входу от узла 4, так и по общемувходу разрешения предустановки, но приэтом все входы 7 должны быть сначала установлены е состояние "0" (или в состояние"1", если требуется установка в единичноеграничное состояние),Использование. предлагаемого решения позволяет простыми приемами с помощью простых однотипных блоковсчетчиков без схем совпадения.и дополнительных триггеров формировать необходимое количество путевых команд с точностьюдо младшего разряда счетчика.Для наладки .устройства не требуетсявысокой квалификации персонала даже вслучае использования на подъемных установках с переменным радиусом наеивки каната или с многослойной навивкой,Существенным является то, что обеспечивается возможность простой коррекциипутевых команд(например, начала замедле1795956 ния) при проходке стволов по сигналу предустановки от датчика прихода в конечное положение.На основе данного решения возможно создание простых унифицированных бло дами разрешения предустановкй которых 10 соединен выход датчика конечного положения подвижного объекта, с входами предварительной установки - выходы соответствующих узлов программирования, а выход старшего. разряда каждого счетчика: - .15 с соответствующими усилителями, выходыкоторых являются выходом устройства,2. Устройство по пЛ, о т л и ч а ю щ е ес я тем, что объем каждого реверсивного счетчика Нсч.макс и максимально возмож ное количество входных путевых импуль-.сов Мах.макс датчика, соответствующее максимальному перемещению подвижного .объекта, находятся в соотношении Мах.макс О 5 йсч.макс. м оставитель В,Клименкоехред М.Моргентал Корректор.И.Муск едактор Т.Иванова каэ 441 Тираж Подписное ВНИИПИ Государственного комитета по изобретениям и открытиям п 113035, Москва, Ж, Раушская наб 4/5 ГК Производственно-издательский комбинат "Патент", г,д, ул.Гагарина Формула изобретения 1. Устройство формирования путевых команд управления подвижным объектом, содержащее датчик путевых импульсов, соединенный с реверсивным счетчиком, усилитель, узел программирования, о т л и ч аю щ е е с я тем, что, с целью упрощения реализации, в него введены датчик конечного положения подвижного объекта и соответственно количеству формируемых команд блоки формирования путевых команд, каждый из которых содержит реверсивный счетчик, узел программирования и усилитель,.причем выходы датчика путевых импульсов соединены с входами счета и его направления реверсивных счетчйков, с вхоков путевых команд общепромышленного и искробеэопасного исполнения с высокой степенью ремонтопригодности, низкой энергоемкостью и материалоемкостью для различных подвижных объектов.
СмотретьЗаявка
4814893, 17.04.1990
КЛИМЕНКО ВИТАЛИЙ ВАСИЛЬЕВИЧ
МПК / Метки
МПК: B66B 1/36
Метки: команд, объектом, подвижным, путевых, формирования
Опубликовано: 15.02.1993
Код ссылки
<a href="https://patents.su/3-1795956-ustrojjstvo-formirovaniya-putevykh-komand-upravleniya-podvizhnym-obektom.html" target="_blank" rel="follow" title="База патентов СССР">Устройство формирования путевых команд управления подвижным объектом</a>
Устройство для контроля состояния тиристоров статического преобразователя

Номер патента: 1072203
Опубликовано: 07.02.1984
МПК: H02M 1/18
Метки: преобразователя, состояния, статического, тиристоров
...контроляНа Фиг. 1 представлена Функциональная схема устройства; на фиг.2 временные диаграмМы ( й - импульсы с выхода задающего генератора; Б - жимпульсы с выхода распределителя импульсон; к - импульсы с выхода датчика контролируемого тиристора; л - импульсы с выхода Формирователя импульсов;м - импульсы с выхода трехвходового элемента, И; н - импульсы с выхода двухвход-ного элемента И) .Временные диаграммы даны применительно к трехфазному автономному тиристорному инвертору напряжений со120 эл. град. проводимостью тиристоров,Устройство (фиг. Ц для контролясостояния тиристоров статическогопреобразователя 1, снабженного задающим генератором 2 и распределителем 3импульсов, содержит датчики 4 - 9состояния тиристоров, формирователь 10...
Датчик состояния вентилей преобразователя

Номер патента: 1677771
Опубликовано: 15.09.1991
Автор: Сороченко
МПК: H02H 7/12
Метки: вентилей, датчик, преобразователя, состояния
...порог. Величину этого порога определяет соотношение сопротивлений ограничительного резистора б, второго резистора нелинейного элемента 7 и порога 510 открывания транзисторов этого нелинейного элемента. Датчик состояния вентилей срабатывает только в том случае, если закрываются все контролируемые вентили.Если величина контролируемого напряты. На его выходе присутствует потенциал выхода питающего выпрямителя 8, который закрывает соответствующий транзистор элемента И 4. Если величина контролируемого напряжения по модулю больше порога, то открывается. один из транзисторов нелинейного элемента, на его выходе при 25 сутствует потенциал общей точки, который открывает соответствующий транзистор элемента И 4.Если величина всех...
Устройство задержки импульсов

Номер патента: 999147
Опубликовано: 23.02.1983
МПК: H03K 5/13
...в прямом направлении поступающие на его вход импульсы вплоть до окончания входного импульса. По окончании входного Нипульса закрывается первый 2 элемент И, отключая суммирующий вход реверсивного счетчика 4 от тактового генератора 1. В реверсивном счетчике оказывается записанным число, пропорциональное длительности входного импульса.При работе реверсивного счетчика 4 в прямом направлении последовательно возбуждаются выяодн дешифратора 8, Сигналы с возбужденных выходов дешифратора поступавт через открытые элементы И первой группы 11-1 в ,11-п на единичные входи соответствующих триггеров группы 10-1 10-п, последовательно устанавливая их в единичное состояние. При этом (в единичное состояние устанавливаются только те триггеры группы...
Генератор импульсов с увеличивающейся длительностью
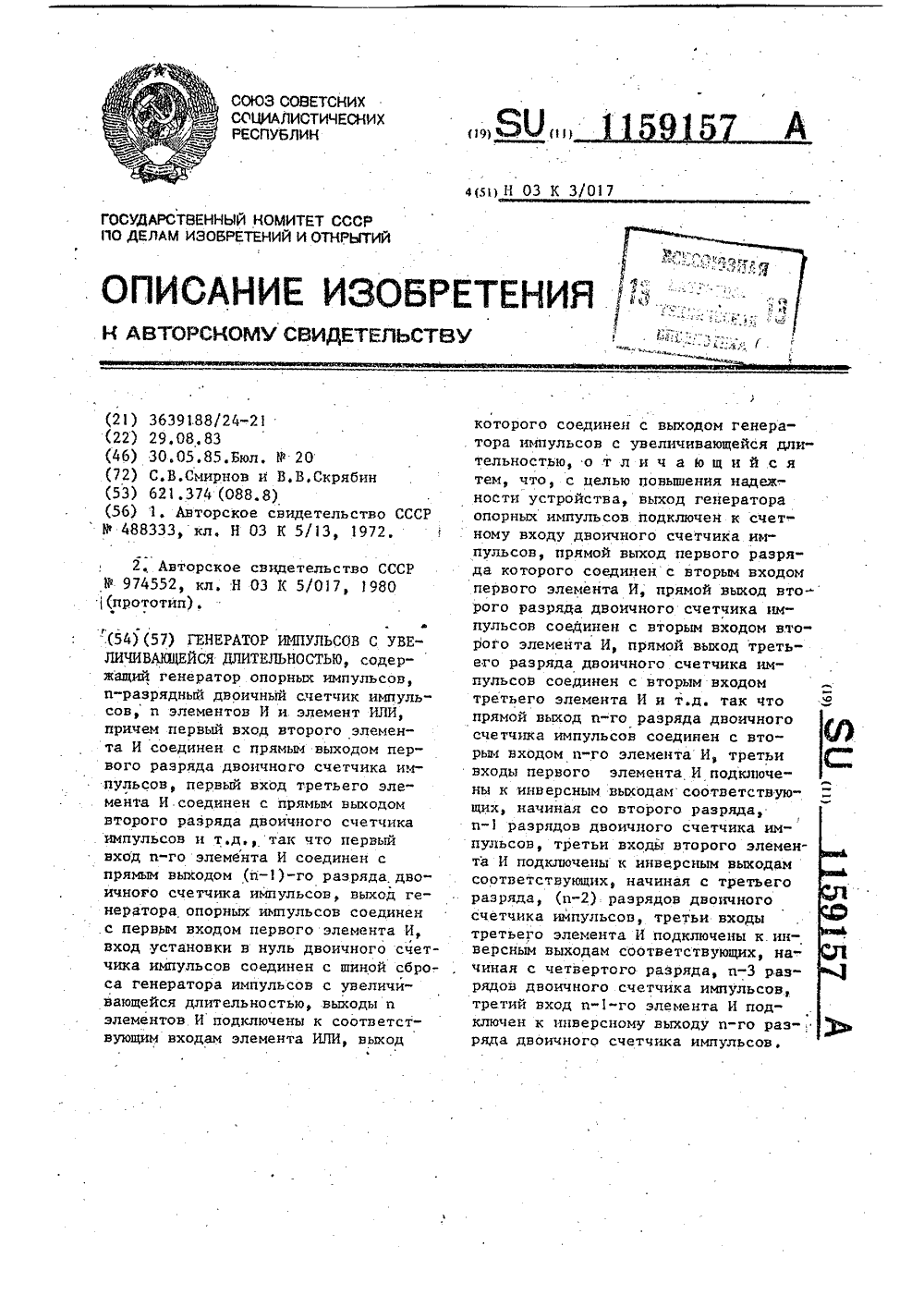
Номер патента: 1159157
Опубликовано: 30.05.1985
МПК: H03K 3/017
Метки: генератор, длительностью, импульсов, увеличивающейся
...выходной последова- да иразрядов двоичного сч и ательности случайным образом принц- импульсов третьи входы третьег элемает значения в интервале от Т/2 доподключены к инверсным вывремени переключения логического ходам соответствующих, начфинах дам соответствующих, начиная с четэлемента, а значит, и скважность лишь вертого разряда, иразрядов двоичслучайным образом принимает заданное .ного счетчика импуль о р ий.ного счетчика импульсов, третий входзначение, равное 3, т.е. такой гене 5 (и)-го элемента И подключен к инратор имеет низкую надежность. версному выходу и-го разому выходу и-го разряда двоичЦель изобретения " повышение надежности генератора импульсов с уве; На фиг, 1 приведена функциональличивающейся длительностью,ная электрическая...
Знакоформирующее устройство

Номер патента: 1259330
Опубликовано: 23.09.1986
МПК: G09G 1/08
Метки: знакоформирующее
...5 ков. Признак группы знаков, в которую входит цифра 8, поступает на входы разрешения выборки микросхемы 556 РТ 5 Ч Ч , а на инверсные входы разре- шениЯ выбоРки Чэ, Ч поДаетсЯ его 40 инверсия (Фиг.2).При подаче на адресные входы указанного кода на выходах У У, (фиг.2) микросхемы 556 РТ 5 должен быть код, указанный в таблице для программирования, причем выходы У,У соответствуют выходному коду, поступающему на преобразователь 7 кода по координате У(У,У 5 ), вь 1- ходы УЗУ соответствуют выход ному коду, поступающему на преобразователь 6 кода по координате Х(Х, Х ), выход У соответствует выходу "Подсвет", а выход У 7 соответствует команде "Конец знака", 55Для организации блока 9 памяти для большого количества знаков адресные входы АА...
Предыдущий патент: Способ транспортирования длинномерных тел вращения через зону нанесения покрытий
Следующий патент: Способ получения диаммонийфосфата
Случайный патент: 232380