Устройство для управления адап-тивным роботом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
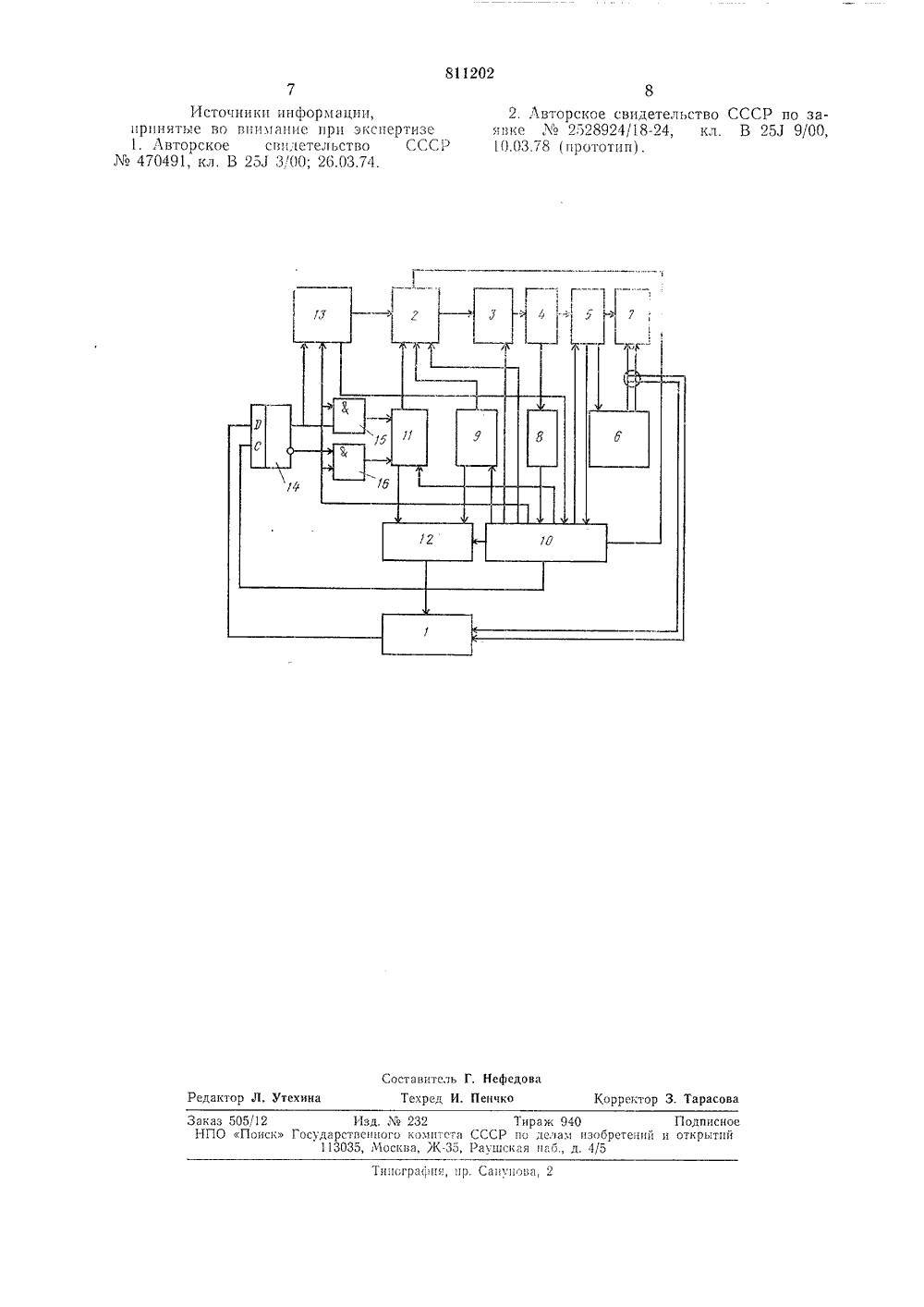
п 118112 О 2 ОПИСАНИЕ ИЗОБРЕТЕНИЯ К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз Ссветсних Соцналистнчесних р;,счнслян(53) УДК 62-50(088,8) по делам изобретений (43) Опубликовано 07,03.81, Бюллетень9 н стнрйтнй(45) Дата опубликования описания 07.03.81(71) Заявител ф:ИВв 54) УСТРОЙСТВО ДЛЯ УГ 1 РАВД ЕИ ИЯ АДАГ 1 ТИВИЫМ РОБОТОМГО Удай тна 1 н нО:"лата (23) ППриоритет Изобретение относится к области робототехники и может быть использовано для управления адаптивным роботом ири автоматизации производственных процессов.Известны устройства для управления адаптивным роботом. Устройство 11, содержащее блок ввода изооражения, операционный блок, коммутатор команд, блок памяти, нуль-орган, блок формирования перемещения, приводы и датчики перемещения исполнительного органа, имеет низкое быстродействие.Наиболее близким техническим решением к изобретению является устройство 2, содержащее последовательно соединенные 15 функциональный преобразователь, коммутатор команд, блок памяти, блок формирования сигналов перемещения, блок управления, блок круговой развертки, коммутатор разверток и блок ввода изображения, установленный на схвате исполнительного органа, а также блок формирования прямоугольного растра, вход которого подключен к первому выходу блока управления, первый выход - ко второму входу коммутатора разверток, а второй выход - к первому входу функционального преобразователя, второй вход которого соединен со вторым выходом блока круговой развертки, третий вход и второй выход - со вторыми выходом и входом блока управления соответственно, третий вход которого через нуль-орган подключен ко второму выходу блока памяти, третий выход - и третьему входу коммутатора разверток, четвертый выход - ко второму входу коммутатора команд, а пятый выход - ко второму входу блока формирования сигналов перемещения, вторые выходы которого соединены со входами приводов, связанных с датчиками положения исполнительного органа, выходы которых подключены и третьим входам блока формирования сигналов перемещения.Низкое быстродействие такого устройства обусловлено сканированием полной поверхности информационного поля независимо от положения детали, Это приводит к непроизводительным затратам времени при вычислении координат центра тяжести и угла ориентации детали, что повышает требования к параметрам системы импульсного освещения и приводит к ее усложнению.Целью изобретения является повышение быстродействиястройства.Сущность изобретения заключается в том, что устройство содержит первый и второй элементы 1 и последовательно соединенные триггер и блок вычисления контура объекта, второй вход которого подклоченк первому входу первого и второго элементов10 20 2 д 9 Д 35 40 45 50 55 60 65 И и шестому выходу блока управления, пергый выход - к четвертому входу функционального преобразователя, а второй выход - к четвертому входу блока управления, седьмой выход которого соединен с первым входом триггера, второй вход которого подключен к выходу блока ввода изображения, первый выход - ко второму входу первого элемента И, а второй выход - ко второму входу второго элемента И. Выходы первого и второго элементов И соединены соответственно со вторым и третьим входами блока формирования прямоугольного растра.На чертеже представлена функциональная схема устройства. Оно содержит блок ввода изображения 1, функциональный преобразователь 2, коммутатор команд 3, блок памяти 4, блок формирования сигналов перемещения 5, приводы 6, датчики положения 7 исполнительного органа, нуль-орган 8, блок круговой развертки 9, блок управления 10, блок 11 формирования прямоугольного растра, коммутатор команд 12, блок 13 вычисления контура объекта, триггер 14, первый 15 и второй 16 элементы И,Устройство работает следующим образом.Положение объекта на рабочей поверхности определяется координатами его центра тяжести ХУ, и углом ориентации оси симметрии объекта относительно некоторой линии отсчета, Вычисление координат полокения детали на рабочей поверхности начинается с момента поступления импульса передачи управления из блока формирования сигналов перемещения 5 в блок управления 10. При расположении блока ввода изображения 1 в схвате робота это свидетельствует о выходе схвата в центр заданной зоны обзора. Вычисление интересующих параметров осуществляется путем обработки оптической информации о положении объекта в зоне обзора, формируемой блоком ввода изображения 1, ь 1 увствительным элементом блока ввода изображения 1 является фотоприемная матрица, на матричное фоточувствительное поле которой с помощью объектива проецируется пзооражение объекта.С началом работы устройства блок управления запускает блок формирования прямоугольного растра 11. Выходные сигналы блока 11 поступают на вход коммутатора разверток 12. Под действием сигнала, поступающего из блока управления 10 на вход коммутатора разверток 12, выходные сигналы блока 11 через коммутатор разверток 12 подаются на вход блока ввода изображения 1. На выходе блока 1 появляется сигнал, логическое значение которого соответствует оптической информации, воздействующей на выбранный элемент информационного поля фотоприемной матрицы, Логическое значение оптической информации с выхода блока 1 под действием сигнала слока управления 10 в конце каждого такта записывается в триггер 14, состояние которого анализируется в начале каждого последующего такта, Если состояние триггера 14, выполненного по схеме триггера, соответствует логическому О, т, е. отсутствию изображения объекта, то в следующем такте осуществляется переход к очередной точке информационного поля фотоприемной матрицы. Это происходит под воздействием сигнала с выхода элемента И 16 на вход безусловного перехода блока 11. Если же состояние триггера 14 соответствует логической 1, т. е, наличию изображения объекта, то в следующем такте сканирование данного столбца (при вычислении Х,.) прекращается и осуществляется переход к начальному элементу очередного столбца информационного поля матрицы. Это происходит под воздействием сигнала с выхода элемента И 15 на вход условного перехода блока 11, На основании логических значений сигналов, поступающих с выхода триггера 14 через блок выделения границы изображения детали 13 и с выхода блока 11, функциональный преобразователь 2 вычисляет значение координаты Л, центра тяжести. Блок 13, анализируя изображение объекта, выраоатывает сигнал, поступающий в блок управления 10 в момент обнаружения задней границы пзосракения объекта, По этому сигналу блок управления 10 переключает блок 11 в режим вычисления координаты Ус пептра тяжести объекта, Таким о: разом, при вычислении координат центра тяжести обеспечивается анализ лишь необходимых для этого элементов информационного поля.Исключение интервала времени, необходимого для анализа избыточных элементов информационного поля, значительно сокращает время вычисления координат, причем сокращение затрат времени тем значительнее, чем ближе к началу координат расположен объект. По окончании вычисления координаты Х, с выхода преобразователя 2 на вход блока управления 10 поступает сигнал, свидетельствующий об этом, и блок управления 10 через коммутатор команд 3 обеспечивает запись информации о координате Х с выхода преооразователя 2 в соответствующую ячейку блока памяти 4. После этого блок управления 10 переключает коммутатор команд и коммутатор разверток 12 в режим определения У,. Вычисление и запись информации У, в блок памяти 4 осуществляется аналогично вычислению ХПосле вычисления координат центра тяжести блок управления 10 выдает в блок формирования сигналов перемещения 5 команду на отработку полученной информации. В процессе отработки этой информации приводами 6 исполнительного органа робота схват робота с установлен 8112025 10 ным на нем блоком 1 перемещается в позицию, находящуюся над центром тяжести объекта. В момент окончания отработки информации о центре тяжести, что фиксируется по совпадению информации, заданной на отработку, и информацииполученной с датчиков положения 7 исполнительного органа робота, из блока 5 в блок управления 10 поступает импульс конца отработки. По этому сигналу блок управления 10 снова выдает команду на вычисление координат центра тяжести детали, что необходимо для контроля совершенного движения и повышения помехоустойчивости устройства адаптивного управления. При определении в последующем цикле вычислений нулевых координат центра тяжести срабатывает нуль-орган 8. Под действием сигнала с выхода нуль-органа 8 блок управления 10 включает режим определения угла ориентации объекта. В режиме определения утла ориентации блок управления 1 О запускает блок круговой развертки 9, Выходные сигналы блока 9 поступают на входы коммутатора разверток 12. Управляющие сигналы, поступающие из блока управления 10 в режиме определения угла ориентации объекта на вход коммутатора разверток 12, обеспечивают прохождение сигналов с выхода блока 9 на выход коммутатора разверток 12. Это обеспечивает формирование дискретной круговой развертки вокруг центра тяжести объекта. Одновременно на другом выходе блока 9 вырабатываются значения угловых расстояний, разделяющих две соседние точки дискретной крутовой развертки. На основании логических значений сигналов, поступающих через триггер 14 и блок вычисления контура обьекта 13 с выхода блока 1, значений угловых расстояний с выхода блока 9 и управляющих сигналов с выхода блока управления 10 операционный блок вычисляет значение угла ориентации. В момент окончания изображения объекта в направлении круговой развертки блок 13 формирует сигнал, поступающий в блок управления 1 О. По сигналу из блока управления 10 вычисленное значение угла ориентации с выхода преобразователя 2 с помощью коммутатора команд 3 записывается в определенную ячейку блока памяти 4. Таким образом, при вычислении угла ориентации обеспечивается анализ лишь необходимых для этого элементов информационного поля, что также сокращает время вычисления угла ориентации. Г 1 осле вычисления угла ориентации блок управления 10 выдает вблок формирования сигналов перемещения 5 команду на отработку полученной информации. 11 осле разворота схвата робота на величину угла ориентации детали на вход блока управле 20 25 30 35 40 45 50 60 65 ния 10 из блока 5 поступает импульс конца отработки, по которому повторяется цикл вычислений угла ориентации. Г 1 рн получении нулевого значения угла ориентации срабатывает нуль-орган 8 и блок управления 10 выдает в блок 5 команду на взятие объекта.Применение изобретения позволит значительно сократить затраты времени, необходимые для вычисления координат центра тяжести и угла ориентации объекта. Формула изобретенн я Устройство для управления адаптивным роботом, содержащее последовательно соединенные функциональный преобразователь, коммутатор команд, блок памяти, блок формирования сигналов перемещения, блок управления, блок круговой развертки, коммутатор разверток и блок ввода изображения, установленный на схвате исполнительного органа, а также блок формирования прямоугольного растра, вход которого подк,ночен к первому выходу блока управления, первый выход - ко второму входу коммутатора разверток, а второй выход - к первому входу функционального преобразователя, второй вход которого соединен со вторым выходом блока круговой развертки, третий вход н второй выход - со вторыми выходом и входом блока управления соответственно, третий вход которого через нуль-орган подключен ко второму выходу блока памяти, третий выход - к третьему входу коммутатора разверток, четвертый выход - ко второму входу коммутатора команд, а пятый вы.;од - ко второму входу блока формирования сигналов перемещения, вторые выходы которого соединены со входами приводов, связанных с датчиками положения исполнительного органа, выходы которых подключены к третьим входам блока формирования сигналов перемещения, отличающееся тем, что, с целью повышения быстродействия устройства, оно содержит первый и второй элементы И н последовательно соединенные триггер н блок вычисления контура объекта, второй вход которого подключен к первому входу первого и второго элементов И и шестому выходу блока управления, первый выход - к четвертому входу функционального преобразователя, а второй выход - к четвертому входу блока управления, седьмой выход которого соединен с первым входом триггера, второй вход которого подключен к выходу блока ввода изображения, первый выход - ко второму входу первого элемента И, а второй выход - ко второму входу второго элемента И, выходы первого и второго элементов И соединены соответственно со вторым и третьим входамц блока формирования прямоугольного растра.811202 Составитель Г. Нефедова Техред И. Пенчко Корректор 3. Тарасова Редактор Л, Утехина Заказ 505/12 Изд.232 Тираж 940 Подписное НПО Поиск Государственного комитета СССР по делам изобретений и открытий 113035, Москва, Ж, Раушская иаб., д. 4/5Типография, ир Сапунова, 2 Истонникп информации,принятые во випмаинс при экспертизе1, Авторское свидетельство СССРЪЪ 470491, кл, В 25,1 3/ОО; 26.03,74. 82. Лвторское свидетельство СССР по заявке М 2528924(18-24, кл. В 25,1 9/00,0.03.78прототип) .
СмотретьЗаявка
2661455, 07.08.1978
РЫБИНСКИЙ АВИАЦИОННЫЙ ТЕХНОЛОГИ-ЧЕСКИЙ ИНСТИТУТ, ЦЕНТРАЛЬНОЕ НАУЧНО-КОНСТРУКТОРСКОЕБЮРО НАУЧНО ИССЛЕДОВАТЕЛЬСКОГОХИМИКО-ТЕХНОЛОГИЧЕСКОГО ИНСТИТУТА
ГЛАДШТЕЙН МИХАИЛ АРКАДЬЕВИЧ, КОМАРОВ ВАЛЕРИЙ МИХАЙЛОВИЧ, САХАРОВ ОЛЕГ ТИМОФЕЕВИЧ, ГУРЕВИЧ СЕРГО МАТВЕЕВИЧ
МПК / Метки
МПК: G05B 17/00
Метки: адап-тивным, роботом
Опубликовано: 07.03.1981
Код ссылки
<a href="https://patents.su/4-811202-ustrojjstvo-dlya-upravleniya-adap-tivnym-robotom.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для управления адап-тивным роботом</a>
Устройство для оптимального управления колебательными объектами второго порядка

Номер патента: 499553
Опубликовано: 15.01.1976
Авторы: Андреев, Игнатенко, Коржов, Костюк
МПК: G05B 11/16
Метки: второго, колебательными, объектами, оптимального, порядка
...и соответствую 5 10 15 23 25 30 35 40 45 50 55 60 65 щая координата объекта с координатного преобразователя 21 поступает на вход сумматора 17.Состояние блока синтеза управлений модели 111, обусловленное сигналом Исх. полож., таково, что на выходе а триггера 7 имеет место 1, а па выходе б - О. При этом триггеры 6, 8, образующие Е/и У через элементы 9, 1 О, 12, 13 устанавливаются в соответствующее состояние, согласно знаку координат х;О и хлоо., которые определяются пороговыми схемами 4 и 5. Тем самым устанавливается связь между текущим состоянием объекта и управлениями Сlм и Уьа значит воспроизводимой с помощью убыстренной модели 22 кривой переключения.При достижении переменной модели х, в координатной системе х,х значения, равного нулю,...
Система оптимального управления объектами второго порядка

Номер патента: 643833
Опубликовано: 25.01.1979
Авторы: Игнатенко, Калашук, Синеглазов
МПК: G05B 13/02
Метки: второго, объектами, оптимального, порядка
...коорцинатахс одной иэ кривых переключения, приводит к изменению знака управления Юоъ 5 и движению объекта к зацанному конечному состоянию, сохранение которого поокончании перехоцного процесса обеспечивается упрежденным на время эапазцывания отключением управления объекта. ЭтоЗо происхоцит в, том случае, когца изображающая точка объекта цостигает отрезка00 или 00, что устанавливается выполнением условия Х( Ф, )=О.Скачкообразное изменение значениязадающего воэцействия (ф ), поступающего на вхоц сумматора 9, привоцит кпоявлению на его выхоце отключения регулируемой переменной объекта Х( ).Согласно знаку Х() блок формирова 4 О ния начальных условий 11 произвоцитвыбор значения управпенияЧ 1 на начальном участке цвижения объекта, что...
Система оптимального управления объектами второго порядка

Номер патента: 954934
Опубликовано: 30.08.1982
Авторы: Синеглазов, Чумаченко
МПК: G05B 13/02
Метки: второго, объектами, оптимального, порядка
...воздействие, обеспечивающее стабилизацию координаты Х на значенииХ = Хтдоп. При этом система реализует нелинейный закон управления, определенный двумя функциями переключения. Первая из которых управляет выводом ограниченной координаты на допустимое значение и переключает ее на стабилизацию, а после стабилизации снова управляет ограниченной координатой, вторая дает моменты начала управления ограниченной координатой. Поскольку кусочно-линейная или ку сочно-нелинейная аппроксимация функций переключения сопряжена со значительными погрешностями, то для реализации закона управления может быть использована модель многократно и в "быстром" времени реализующая уравнения движения объекта Когда параметры объекта неизвестны, то...
Устройство для идентификации нестационарных объектов второго порядка

Номер патента: 610066
Опубликовано: 05.06.1978
МПК: G05B 17/02
Метки: второго, идентификации, нестационарных, объектов, порядка
...системы и вхо-,ду ее в нелинейную зону. Кроме того, 30устройство не позволяет определить коэф-,фициенты передаточных функций нествцио-;нарных систем и систем со случайным 1 запаздыванием.Это снижает точность определения коэффнциентов передаточных функций исследуе-,мого объекта.Целью изобретения является повышениеточности .работы устройства,Поставленная цель достигается тем, 40что в предложенном устройстве установленблок управления, в выход блока сравнения,через последовательно соединенный первыйи второй ключи соединен со входом первогринтегратора. Выхоц четвертого интегратора через первый инвертор, первый умножи-;тель и первый сумматор соединен с первыйвходом вычислителя коэффициентов объекта,Выход третьего интегратора...
Система оптимального управления объектами второго порядка

Номер патента: 920634
Опубликовано: 15.04.1982
Автор: Синеглазов
МПК: G05B 13/04
Метки: второго, объектами, оптимального, порядка
...ООтттст или Отттт О Отттсигде 0 ст,- максимальное значение управляющего воздействия. При этом управляющее устройство, синтезирующееоптимальное управление в Функциифазовых переменных и чистого временного запаздывания в координатах должно реализовать нелинейный закон уп5 920634равления, определяемый на фазовойплоскости уравнениями двух линий переключения. При этом для исключениянеобходимости использования блокапостоянного или регулируемого запаздывания, носящего дополнительнуюпогрешность в решении, целесообразно воспроизводить линии переключения в преобразованных координатахсоответственно для первой кривой 0ХХу ХХ и ХХ, ХХ для второй.При этом обе линии переключения впреобразованных координатах оказываются подобны друг другу,...
Предыдущий патент: Устройство для формирования функ-ции переключения b следящей системес переменной структурой
Следующий патент: Устройство для записи программыуправления промышленным роботом
Случайный патент: Устройство для сравнения чисел с допусками