Система оптимального управления объектами второго порядка
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 954934
Авторы: Синеглазов, Чумаченко





Текст
Союз СоветскихСоциалистическихРеспублик АВТОРСКОМУ СВИДЕТЕЛЬСТВ Дополнительное к авт. свид-ву У 651308 1)М. Кд. С 05 В 13/О 01. 81 (21) 323428(22)Заявлено 1 присоединением заяви Государственный комитет СССР по делен изобретений и атнрытий(088.8) Дат писания 30.08. бликовани 72) Авторы изобретени инеглазов и Е. И ченко Киевский ехнический ской социа рдена Ленина пол ия Великой Октяб(51) СИСТЕМА ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ОБЪЕКТАМИ ВТОРОГО ПОРЯДКАеи ред. ыстроблока ЭКВИВАЛЕНТНОСТЬ, подключенноговторым входом к выходу второго триггера, и первым входом первой модели,второй вход которой соединен черезблок управления первой моделью с выходом нуль-органа и вторым входомпервого блока сравнения, третий входс выходом первого сумматора, четвер"тый вход - с первым входом второй модели и через интегратор, блок умножения, первый функциональный преобразователь с входом объекта и вторымвходом второй модели, выход которойподключен к первому входу второгосумматора, соединенного выходом с вто.рым входом блока умножения, а вторым входом - с первым входом первогосумматора и первым выходом объекта,второй выход которого подключен кпятому входу первой модели 11. рогоми,руемой о ата ехно 51308 изуправлеа, содеркото ой По основному авт, св, й." 6вестна система оптимальногония объектами второго порядкжащая первую модель, выходы р соединены с входом нуль-органа и первым входом первого блока сравнения, подключенного выходами к соответствующим входам первого триггера, третий вход которого соединен с первым входом второго триггера и через блок на" чальных уставок, с выходом первого сумматора, а первый выход - с входом Эта система обладает низкими характеристиками по точности и быстродействию, что является ее недостатком. Изобретение относится к систмам автоматического управленияназначено для оптимального по бдействию управления неколебателным динамическими объектами втопорядка с переменными параметрограничением производной регулвеличины и может быть использодля управления летательными апми, электроприводами и химикологическими процессами,ф-аЯкает л пВРрргинституТ- -.истической революции9549 3Цель изобретения - повышение точности и быстродействия системы.Поставленная цель достигается тем, что в системе дополнительно установлены второй функциональный преоб 5 разователь, второй блок сравнения, элемент И, ключ, третий триггер, вход которого соединен с выходом блока начальных уставок, а выход - с первым входом ключа, подключенного вторым 1 О входом к второму выходу первого триггера, выходом - к входу объекта, а управляющим входом к второму входу блока управления первой моделью и выходу элемента И, первый вход кото рого соединен с выходом блока, ЭКВИВАЛЕНТНОСТЬ, а второй - через последовательно соединенные втордй блок сравнения и второй функциональный преобразователь к второму выходу объек о та.На фиг. 1 представлена блок-схема системы оптимального управления объектами второго порядка; на фиг. 2 переходный процесс, 25Система оптимального управления объектами второго порядка содержит первую модель 1, выходы которой соеди иены с входом нуль-органа 2 и первым входом первого блока 3 сравнения, , подключенного выходами к соответствующим входам первого триггера 4, тре. тий вход которого соединен с первым входом второго триггера 5 и через блок,б начальных уставок с выходами первого сумматора 7, а первый выходс входом блока ЭКВИВАЛЕНТНОСТЬ 8, подключенного вторым входом к выходу второго триггера 5, и первым входом первой модели 1, второй вход которой соединен через блок управления первой моделью 9 с выходом нуль-органа 2 и вторым входом первого блока сравнения 3, третий вход - с выходом первого сумматора 7, четвертый вход - с первым входом второй модели 10 и через интегратор 11, блок 12 умножения, первый функциональный преобразователь 13 с входом объекта 14 и вторым входом второй модели 10, вйход которой под ключен к первому входу второго сумматора 15, соединенного выходом с вторым входом блока 12 умножения, а вторым входом - с первым входом первого сумматора 7 и первым выходом объ 55 екта 14, второй выход которого подключен к пятому входу первой модели 1, при этом вход третьего триггера 34 ф16 соединен с выходом блока начальныхуставок 6, а выход - с первым входомключа 17, подключенного вторым входомк второму выходу первого триггера 4,выходом - к входу объекта 14, а управляющим входом к второму входу блока управления первой модельо 9 и выходу элемента И 18, первый вход которого соединен с выходом блока ЭКВИВАЛЕНТНОСТЬ 8, а второй через последовательно соединенные второй блок 19сравнения, второй функциональныйпреобразователь 20 к второму выходуобъекта 14,Переходной процесс в системе представлен на фиг 2, где приняты следующие обозначения:(с) - задающеевоздействие; Х (С), Х 2(С) - фазовыекоординаты объекта, О(й) - управляющее воздействие.Задачей оптимальной по быстродействию системы управления объектамивторого порядка с ограничением является формирование последовательности оптимальных управлений вида+Оро , где Опо - максимальное значеФОхние управляющих воздействий как функции фазовых координат объекта управления Х 1(с), Х(С), Ост - управляющее воздействие, обеспечивающее стабилизацию координаты Х на значенииХ = Хтдоп. При этом система реализует нелинейный закон управления, определенный двумя функциями переключения. Первая из которых управляет выводом ограниченной координаты на допустимое значение и переключает ее на стабилизацию, а после стабилизации снова управляет ограниченной координатой, вторая дает моменты начала управления ограниченной координатой. Поскольку кусочно-линейная или ку сочно-нелинейная аппроксимация функций переключения сопряжена со значительными погрешностями, то для реализации закона управления может быть использована модель многократно и в "быстром" времени реализующая уравнения движения объекта Когда параметры объекта неизвестны, то непосредственное построение линий переключения невозможно и для реализации оптимального по быстродействию алгоритма управления необходимо идентифицировать объект,кИзменения переменных объекта 14 Х(С) и Х(С) поступают как нар эльные условия в модель 1. Как только координата модели 1 ХЙ), где=1(м, ,м ) 1 - масштаб времени,"образуемая в процессе решения моделью 1 уравнений движения объекта 14, принимает нулевое решение, нуль-орган 2 вырабатывает сигнал, поступающий на входы блока 9 управления моделью и блока 3 сравнения. При этом блок 3 сравнения определяет знак переменной Х(1); поступающий на его другой вход, и возбуждает в зависимости от значения 51 пц Х(1) один из входов триггера 4. И поскольку до достижения изображающей точкой объекта 14 линии переключения знак переменной Х Я ) не меняется, то на объект по-прежнему подает. ся управляющее воздействие Ост, В то же время сигнал, поступающий с нуль-органа 2 на блок управления модлью 1, вызывает изменение режима работы модели 1, переводя ее в режим задания начальных условий, После этого весь режим работы системы повторяется до тех пор, пока при возбуждении нуль-органа 2 блок сравнения 3 не определит изменения знака переменной Х 1( ) при Х 2 Я) = 0 (процесс настройки заканчивается до этого момента), Это свидетельствует о прохождении траектории отображающей точки модели 1 через начало координат системы. При этом триггер 4 изменяет свое состояние и поскольку состояния триггеров 4 и 5 в этом случае не совпадают, то блок эквивалентность останавливает решение на модели 1, на выходе элемента И 18 сигнал "0" и, следовательно, на вход объекта подается сигнал с выхода триггера 4, Движение объекта 14 при подобном управлении происходит по траектории, обеспечивающей минимальную длительность про- . цесса управления, что обеспечивает повышение точности и быстродействия системы соответственно на 204 и 30. Формула изобретения Система оптимального управления объектами второго порядка по авт. св,651308, о т л и ч а ю щ а я с я тем, что, с целью повышения точности и быстродействия системы, она содержит второй функциональный преобразователь, второй блок сравнения, элемент 5 95493Система работает следующим обра зом.Изменение значений задающего воздействия ф (С), поступающего на вход сумматора 7, или изменение параметров 3 объекта 14 приводит к появлению на его выходе отклонения регулируемой переменной Х 1(С). По знаку Хй(С) блок 6 начальных уставок производит выбор значения управления на начальном учав стке движения объекта 14, что обеспечивается начальной установкой триггера 4. При этом триггеры 16, 5 переводятся в то же состояние, что и триг гер 4, а блок ЭКВИВАЛЕНТНОСТЬ 8 выдаЗ ет сигнал "1" на вход элемента И 18, на второй вход которого поступает нулевой сигнал с блока 19 сравнения, поскольку величинаХ (С) (абсолютная величина Х(С) образуется вслед ствие прохождения величины Х(С) чераз функциональный лраооразоааталь 20) не достигло своего ограничения.В результате, на вход управления первой моделью 1 поступает сигнал "0"25 и модель 1 находится в режиме задания начальных условий. При этом выдается сигнал управления Оо, = -51 по Х(С) с триггера 4 через ключ 17 на входы объекта 14, второй модели 10 и зф функционального преобразователя 13, что вызывает изменение выходных сигналов объекта 14 и модели 10. Выходные сигналы объекта 14 и модели 10 поступают на входы сумматора 15 для3 формирования сигнала рассогласования Я(С), вызванного изменением параметров объекта 14. Сигнал .(С) с выхода сумматора 15 подается на одни из входов блока 11 умножения, на другой вход которого поступает выходной сигнал функционального преобразователя 13 дструктура которого определяется по методу вспомогательного оператора. Выходной сигнал блока 11 умножения, определяющий скорость изменения переменного параметра объекта 14, посредством интегратора 11 подается на входы первой и второй моделей 1, 10. Как только Х ( С) достигает Х 2 доп что определяет начало участка стабили зации,.на выходе элемента И 20 появляется н 1" и первая модель 1 переводится в режим периодического решения. При этом на ее вход подается управлячЫ ющии сигнал Ом = -О от с триггера 4, а на вход объекта 14, модели 10, функ. ционального преобразователя 13 управляющий сигнал О;т с триггера 16.7 9593 8 И, ключ,. третий триггер, вход которо- динен с выходом блока ЭКВИВАЛЕНТНОСТЬ, го соединен с выходом блока начальных а второй через последовательно соедиуставок, а выход - с первым входом ненные второй блок сравнения и втоключа, подключенного вторым входом к рой функциональный преобразователь второму выходу первого триггера, вы- % с вторым выходом объекта. ходом - к входу объекта, а управляю- Источники информации, щим входом - к второму входу блока принятые во внимание при экспертизе управления первой моделью и выходу 1. Авторское свидетельство СССР элемента И, первый вход которого сое 651308, кл. С 05 В 13/02, 1973.954934 Составитель В. КуэМотыль Техред Т.Маточка ор М Шарощи ор дакт ака дарст изоб ва,"Патент илиа Ф Тираж ВНИИПИ Го по дел 3035, Мос47 914су Подписноеенного комитета СССРетений и открытий5 Раушская наб д Ужгород, ул. Проектная,
СмотретьЗаявка
3234288, 12.01.1981
КИЕВСКИЙ ОРДЕНА ЛЕНИНА ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ ИМ. 50-ЛЕТИЯ ВЕЛИКОЙ ОКТЯБРЬСКОЙ СОЦИАЛИСТИЧЕСКОЙ РЕВОЛЮЦИИ
СИНЕГЛАЗОВ ВИКТОР МИХАЙЛОВИЧ, ЧУМАЧЕНКО ЕЛЕНА ИЛЬИНИЧНА
МПК / Метки
МПК: G05B 13/02
Метки: второго, объектами, оптимального, порядка
Опубликовано: 30.08.1982
Код ссылки
<a href="https://patents.su/5-954934-sistema-optimalnogo-upravleniya-obektami-vtorogo-poryadka.html" target="_blank" rel="follow" title="База патентов СССР">Система оптимального управления объектами второго порядка</a>
Система управления объектом с несколькими управляющими входами

Номер патента: 1287105
Опубликовано: 30.01.1987
Авторы: Авдеев, Киселев, Мышляев, Попов, Соловьев
МПК: G05B 13/04
Метки: входами, несколькими, объектом, управляющими
...с выхода первого источника 15 постоянного сигнала. Полученный сигнал о величине И(С) контролируемого возмущения с выхода первого элемента 16 сравнения подается на первый вход блока 18 умножения, где умножается на коэффициент К (С), сигнал о котором поступает на второй вход этого блока умножения с выхода блока 17 адаптации. В результате на выходе блока 18 умножения формируется сигнал о величине ьц (С) изменения интегрального значения общего управляющего воздействия, необходимого для компенсации тт(С)дЦ (С) : К (с)ьт(с)., (6) выходов соответственно четвертого 40и первого 16 элементов сравнения, поформуле 11 дц В.-К,ОУ,ф1 У 1 дВ 7 -Я у+ 1 т(е-.) 40 45 50 55 7 1 3-й порции материала в объекте управления,Сигнал у(С) об усредненном...
Устройство для контроля логических блоков

Номер патента: 1608672
Опубликовано: 23.11.1990
Авторы: Кокоровец, Новиков, Пахмутов, Солоха, Ушаков
МПК: G06F 11/26
Метки: блоков, логических
...выходов, Процесс прекращается по переходу в нулевое состояние сигнала на выходе 54, либопо переходу в единичное состояниестаршего разряда счетчика 31,2 блока 10 управления, которое через элемент НЕ 27.1 также прекращает проверку объекта 12 контроля. Режим проверки заканчивается снятием сигналас входа 57,Режим вывода начинается с установки сигналов на входе 58 в единичноесостояние, на входе 56 - в нулевое,На входы 18, 20 Формирователя 1 сблока 10 управления поступают нулевые уровни сигналов, поэтому его выходы неизменны, содержание блока 48также не изменяется,Так как на восьмом входе блока 10управления присутствует единичноесостояние, то по переходу сигналана входе 57 с нулевого в единичноеэлемент И 29.2 на выходе 26 блока...
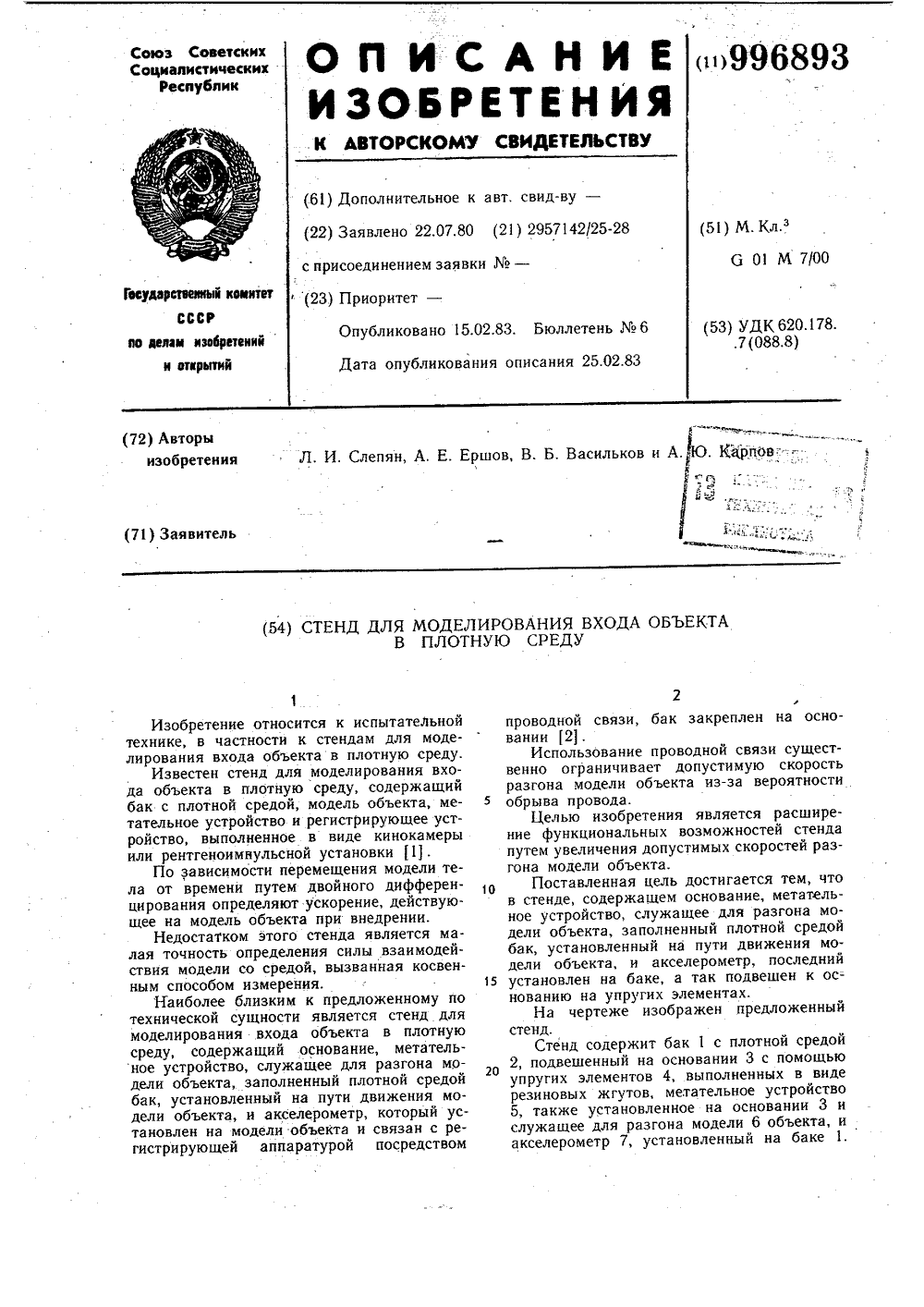
Стенд для моделирования входа объекта в плотную среду
Номер патента: 996893
Опубликовано: 15.02.1983
Авторы: Васильков, Ершов, Карпов, Слепян
МПК: G01M 7/00
Метки: входа, моделирования, объекта, плотную, среду, стенд
...на пути движения модели объекта, и акселерометр, последний 5 установлен на баке, а так подвешен к основанию на упругих элементах.На чертеже изображен предложенныйстенд.Стенд содержит бак 1 с плотной средой202, подвешенный на основании 3 с помощью упругих элементов 4, выполненных в виде резиновых жгутов, метательное устройство 5, также установленное на основании 3 и служащее для разгона модели 6 объекта, и акселерометр 7, установленный на баке 1.996893 Формула изобретения НИИПИраж 871 лиал ПП Ужгород Заказ 921/60 Подписное Патент,ул. Проектная,, Стенд работает следующим образом.Метательное устройство 5 разгоняет модель 6 объекта в сторону бака 1. При внедрении модели 6 в плотную среду 2 начинается процесс ее торможения. Сила...
Устройство для контроля цифровых блоков

Номер патента: 1037259
Опубликовано: 23.08.1983
МПК: G06F 11/16
...блока,вход которого соединен с шиной входных и выходных сигналов интегральных схем модуля, выход регистра длины теста соединен с первым входомвторого блока сравнения, второй входкоторого соединен с одноименным входом регистра длины теста и первым выходом счетчика тактов, второй входи первый вход которого соединен с четвертым входом и вторым выходом основного Ьлока управления соответственно,дополнительные входы - выходы счетчика тактов, регистра длины теста,регистра результата, дополнительногои основного блоков управления соедикоторого соединен с первым входом блока индикации, первая группа входовкоторого соединена с второЙ ".группойвыходов блока управления, третья группа выходов которого соединена с первой группой входов блока...
Устройство для контроля блока памяти

Номер патента: 1040525
Опубликовано: 07.09.1983
Автор: Бессмертный
МПК: G11C 29/00
...для контроля блока памяти. Устройство для контроля блока памяти содержит элементы И 1-5, элементы ИЛИ 6 и 7, триггеры 8 и 9, формирователи 10 импульсов, выходной регистр 11, регистр 12 адреса, дешифратор 13 адреса,.схему 14 сравнения, шины 15 ввода информации, соединен ные через регистр 11 с контролируемым блоком 16 памяти, счетчик 17 импульсов, элемент И 18, элемент ИЛИ 19, ключиз 10405 20 и 21 схемы, группы регистров 22 и 23 группы схем 24 и 25 сравнения, дополнительный элемент И 26, распределители 27 и 28 импульсов дополнительный формирователь 29 импульсов, служащий для первого импульса из последовательности импульсов.Устройство работает следующим образом.В исходном состоянии триггеры 8 и 10 9 установлены в нулевое состояние,...
Предыдущий патент: Система регулирования
Следующий патент: Регулятор частоты вращения ротора турбокомпрессора
Случайный патент: Струговая установка