Самонастраивающаяся система управ-ления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
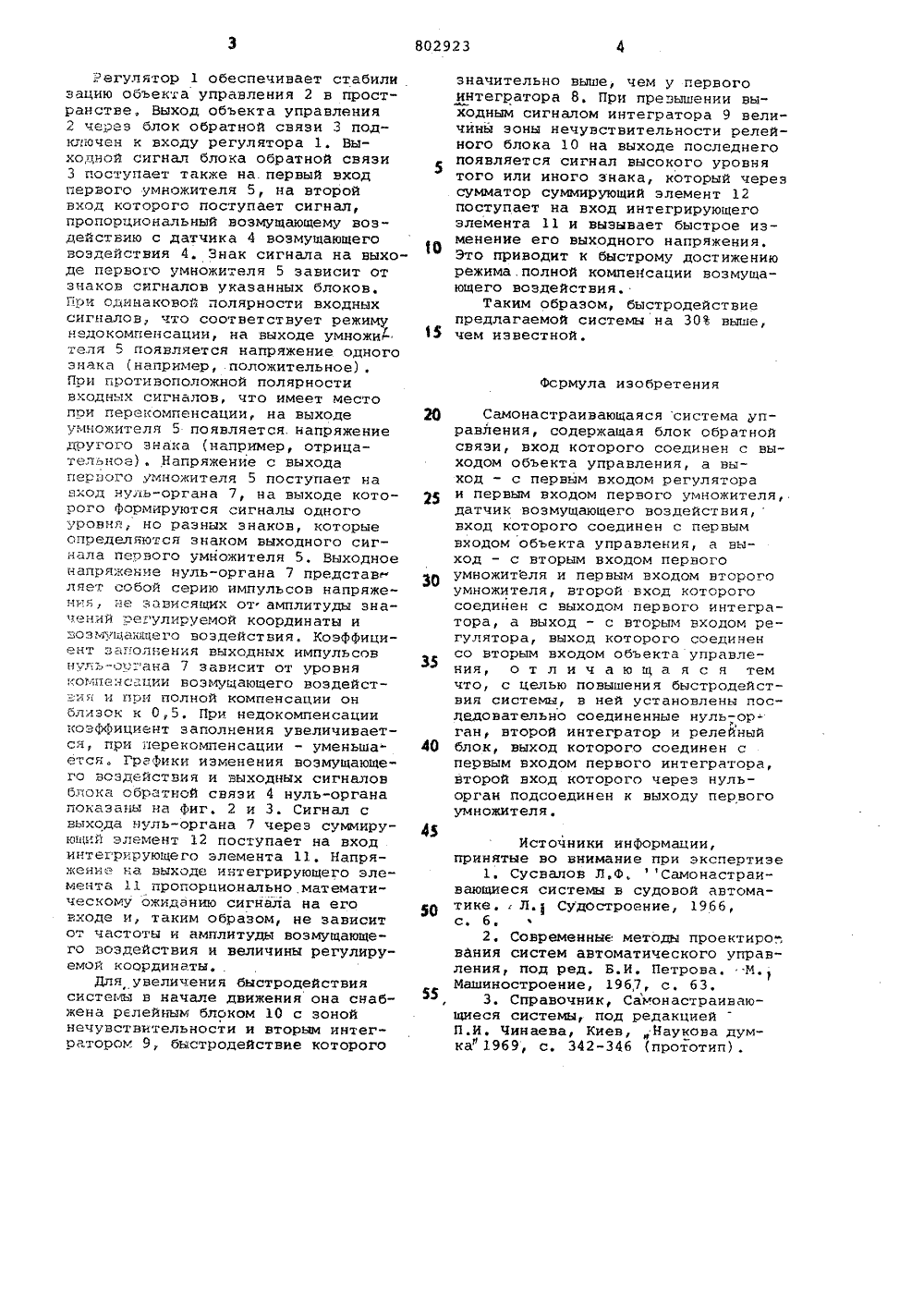
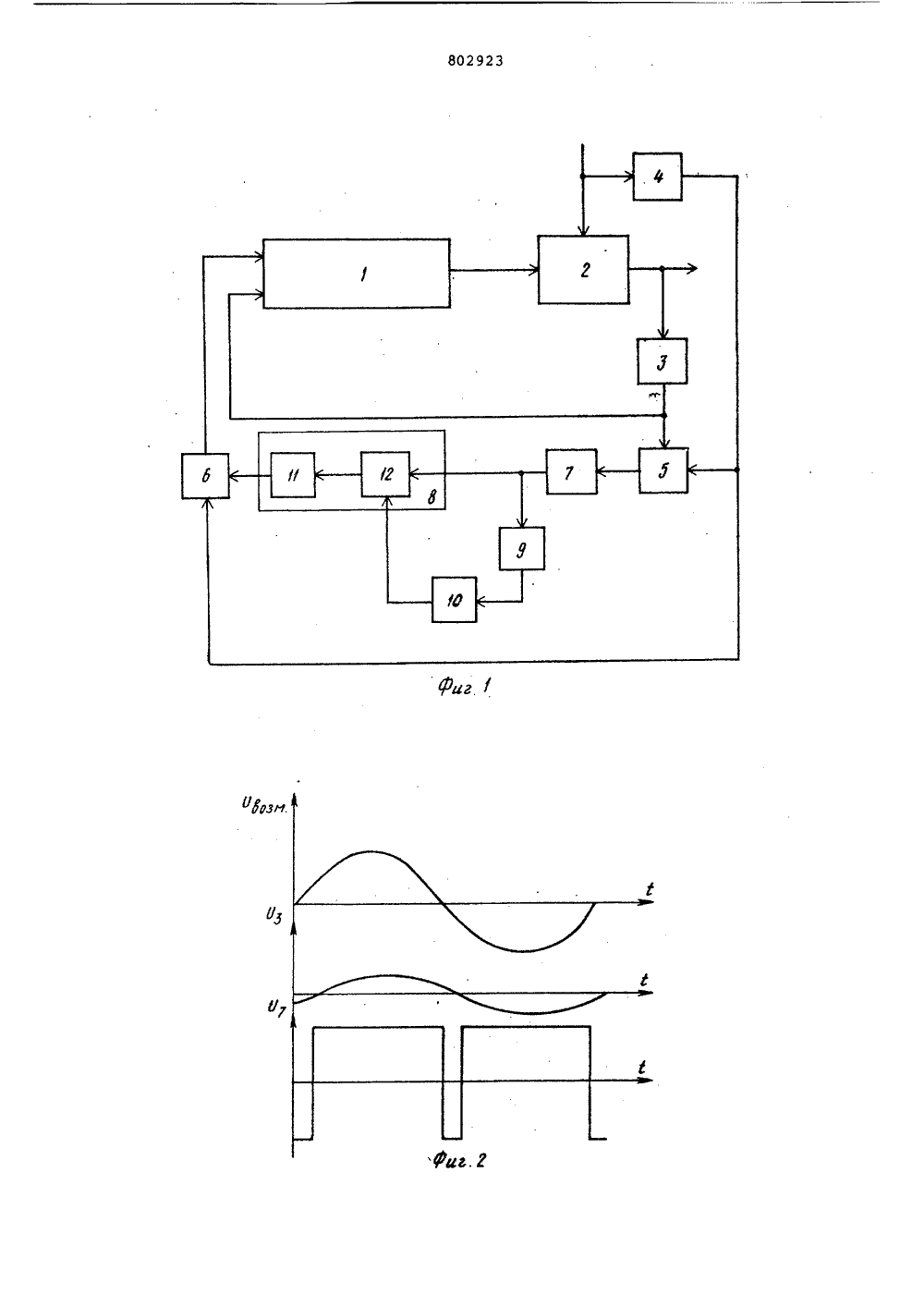
Союз Советских Социалистических Рвспублнн(22) Заяелвио 05 Л 2.79 (21) 2721746/18-24 р 1)м, к .з 6 05 В 13/02 с присоединением заявки Ио Государственный комитет СССР по делам изобретений и открытий(54) САМОНАСТРАИВРЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ позы 10 те- бот Изобретение относится к областисамонастраивающихся систем автоматического регулирования и предназначено для стабилизации инерционФных объектов, установленных наподвижном основании.Известны самонастраивающиесясистемю, для повышения точностикоторых используются контуры самонастройки компенсирующих сигналов(1 и (2 .Из известных систем наиболееблизкой к изобретению по техническойсущности является самонастраивающаяся система управления, содержащаяблок обратной связи, вход которогосоединен с выходом объекта управления, а выход - с первым входомрегулятора и первым входом первогоумножителя, датчик возмущающеговоздействия, вход которого соединенс первым входом объекта управления,а выход - с вторым входом первогоумножителя и первым входом второгоумножителя, второй вход которогосоединен с выходом первого интегратора, а выход - с вторым входомрегулятора, выход которого соединенс вторым входом объекта управления(3),Целью изобретения являетсяшение быстродействия системы,Достигается это тем, что в системе установлены последовательно соединенные нуль-орган, второй интегратор и релейный блок, выход которогосоединен с первым входом первого интегратора, второй вход которого через нуль-орган подключен к выходупервого умножителя,На Фиг. 1 дана блок-схема сисмы; на фиг. 2 - осциллограммы расистемы при некоменсации; на 15 фиг. 3 - осциллоГраМьы работы системы при перекомпенсации.Блок-схема содержит регулятор,1, объект управления 2, блок обратной связи 3, датчик возмущающего 20 воздействия 4, первый и второй умножители 5 и 6, нуль-орган 7, первый и второй интеграторы 8 и 9, релейный блок 10, интегрирующий элемент 11, суммирующий элемент 12,О м - возмущающее воздействие,03 - сигнал на выходе блока обратносвязи, О - сигнал на входе нульоргана.Система работает слеДующим обра" 30 зом.20 25 30 35 40 Регулятор 1 обеспечивает стабили зацию объекта управления 2 в пространстве, Выход объекта управления 2 через блох обратной связи 3 подключен к входу регулятора 1. Выходной сигнал блока обратной связи 3 поступает также на.первый вход первого умножителя 5, на второй вход которого поступает сигнал, пропорциональный возмущающему воздействию с датчика 4 возмущающего воздействия 4. Энак сигнала на выходе первого умножителя 5 зависит от знаков сигналов укаэанных блоков. При одинаковой полярности входных сигналов, что соответствует режиму недокомпенсации, на выходе умножи талл 5 появляется напряжение одного знака например, положительное) . Пои противоположной полярности входных сигналов, что имеет место при перекомпенсации, на выходе умножителя 5 появляется напряжение другого знака (например, отрицательное). Напряжение с выхода первого умножителя 5 поступает на вход нуль-органа 7, на выходе которого Формируются сигналы одного уровня, но разных знаков, которые определяются знаком выходного сигнала первого умножителя 5. Выходное напряжение нуль-органа 7 представ ляет собой серию импульсов напряжения, не зависящих от амплитуды значен,1 й регулируемой координаты и возмущающего воздействия. КоэФФициент заполнения выходных импульсов нуль-зр "ана 7 зависит от уровня компенс:.ции возмущающего воэдейст.-.ия и при полной компенсации он близок к 0,5. При недокомпенсации коэФФициент заполнения увеличивается, при перекомпенсации - уменьша" ется. ГргФики изменения возмущающего воздействия и выходных сигналов блока обратной связи 4 нуль-органа показаны на Фиг2 и 3. Сигнал выхода нуль-органа 7 через суммирующий элемент 12 поступает на вход интегрирующего элемента 11. Напряжение на выходе интегрирующего элемента 11 пропорционально,математическому ожиданию сигнала на его входе и, таким образом, не зависит от частоты и амплитуды возмущающего воздействия и величины регулируемой координаты.Для увеличения быстродействия системы в начале движения она снабжена релейным блоком 10 с зоной нечувствительности и вторым интегратором 9, быстродействие которого значительно выше, чем у первого интегратора 8. При превышении выходным сигналом интегратора 9 величинй эоны нечувствительности релейного блока 10 на выходе последнего появляется сигнал высокого уровня того или иного знака, который через сумматор суммирующий элемент 12 поступает на вход интегрирующего элемента 11 и вызывает быстрое изменение его выходного напряжения, Это приводит к быстрому достижению режима полной компенсации возмущающего воздействия.Таким образом, быстродействие предлагаемой системы на 30 выше, чем известной. формула изобретения Самонастраивающаяся система управления, содержащая блок обратнойсвязи, вход которого соединен с выходом объекта управления, а выход - с первым входом регулятораи первым входом первого умножителя,датчик возмущающего воздействия,вход которого соединен с первымвходом объекта управления, а выход - с вторым входом первогоумножителя и первым входом второгоумножителя, второй вход которогосоедийен с выходом первого интегратора, а выход - с вторым входом регулятора, выход которого соединенсо вторым входом объекта управления, о т л и ч а ю щ а я с я темчто, с целью повышения быстродействия системы, в ней установлены посЛадовательно соединенные нуль-орган, второй интегратор и релейныйблок, выход которого соединен спервым входом первого интегратора,второй вход которого через нульорган подсоединен к выходу первогоумножителя,Источники инФормации,принятые во внимание при экспертизе1. Сусвалов Л.Ф. Самонастраивающиеся системы в судовой автоматике. с Л, Судостроение, 1966,с. 6.2. Современные методы проектиро"вания систем автоматического управления, под ред. Б.И. Петрова. М.Машиностроение, 1967, с. 63,3. Справочник, Самонастраивающиеся системы, под редакциейП.И. Чинаева, Киев, Наукова думка" 1969, с, 342-346 (прототип).802923 Составитель Ю.РладкрвТекред Е. Раврилеюко Корректор М.Шарош Редакт онч Заказ 10614/60 Тираж 951 . Подписное ВНИИПИ Государственного комитета СССР по делам изобретений и открытий113035, Москва, Ж, Раущская наб д. 4/5
СмотретьЗаявка
2721746, 05.02.1979
ПРЕДПРИЯТИЕ ПЯ А-1658
ИВАНОВ ВЛАДИМИР ЕВГЕНЬЕВИЧ, КУТУЗОВ ВЛАДИМИР КУЗЬМИЧ, ШАТАЛОВ ВИКТОР АЛЕКСАНДРОВИЧ, ХРОМУШКИН ВЛАДИМИР МИХАЙЛОВИЧ
МПК / Метки
МПК: G05B 13/02
Метки: самонастраивающаяся, управ-ления
Опубликовано: 07.02.1981
Код ссылки
<a href="https://patents.su/4-802923-samonastraivayushhayasya-sistema-uprav-leniya.html" target="_blank" rel="follow" title="База патентов СССР">Самонастраивающаяся система управ-ления</a>
Способ релейного управления объектом с астатизмом второго порядка

Номер патента: 894671
Опубликовано: 30.12.1981
Авторы: Ануприенко, Карпачев, Сайфетдинов
МПК: G05B 13/00
Метки: астатизмом, второго, объектом, порядка, релейного
...начального значения вы 3 8946ходной координаты Ор (участок 1-2 фазовой траектории), при этом в моментобнуления выходной координаты (точка2) скорость изменения выходной координаты достигает значения - 6 (О ),4 аС изменением знака выходной координаты к управляющему объекту прикладывают управляющее воздействие, направленное на уменьшение выходной координаты (участок траектории 2-4), 1 оВид фазовых траекторий зависитот параметров исполнительных органозпоэтому в зависимости от этих параметров можно заранее определить тозначение скорости изменения выходнойкоординаты, при котором надо произвести последнее изменение знака управления,Учитывая вышесказанное, вводитсякоэффициент уменьшения запомненного,значения скорости изменения...
Устройство выделения первого и пос-леднего импульсов b пачке

Номер патента: 839035
Опубликовано: 15.06.1981
Автор: Самусь
МПК: H03K 5/153
Метки: выделения, импульсов, пачке, первого, пос-леднего
...пачки импульсов проходит через элементы 3 и 4 на выход 13 устройства. Задним франтом первый импульс устанавливает триггер 1 в нулевое состояние, при 60 котором с выхода триггера 1 на вход элемента И 4 поступает низкий по" тенциал, препятствующий прохождению остальных импульсов пачки на выход 13 устройства. 65 Каждый импульс пачки поступает на вход формирователя 9 и на вход 10 управления прямым счетом счетчика 5. Формирователь 9 формирует из переднего фронта каждого входного импульса. сигнал, который поступает на вход сброса счетчика 5 и обнуляет его. В момент нулевого содержимого счетчика на выходе дешифратора 7 нуля появляется низкий потенциал, .который устанавливает пересчетный блок 8 также в нулевое состояние. В течение длительности...
Селектор первого одиночного импульса

Номер патента: 930638
Опубликовано: 23.05.1982
Авторы: Ермоленко, Золочевский, Кот, Марченко
МПК: H03K 5/22
Метки: импульса, одиночного, первого, селектор
...содержащая два одиночных импульса а, и а 4, отстоящих друг от друга на величину Т, где Т - период следования тактовых импульсов, и множество парных импульсов аа,аа а О причем расстояние между импульсами в паре не более чем 0,5 Т, а расстояние между парой импульсоваа и первым одиночным импульсом а 5, между вторым одиночным импульсом 04 и последующей парой им- пульсовО 5 С, между двумя парами импульсов может быть Т, 2 Т,.ЗТ, и т.д. в зависимости от того, присутствует пара импульсов в данный момент времениили нет (см, фиг. За).На шину 10 тактовых импульсов устройства поступают тактовые импульсы с периодом следования Т; сдвинутые относительно импульсов входного сигнала таким образом, чтобы тактовый импульс находился между...
Устройство для оптимального управления колебательными объектами второго порядка

Номер патента: 499553
Опубликовано: 15.01.1976
Авторы: Андреев, Игнатенко, Коржов, Костюк
МПК: G05B 11/16
Метки: второго, колебательными, объектами, оптимального, порядка
...и соответствую 5 10 15 23 25 30 35 40 45 50 55 60 65 щая координата объекта с координатного преобразователя 21 поступает на вход сумматора 17.Состояние блока синтеза управлений модели 111, обусловленное сигналом Исх. полож., таково, что на выходе а триггера 7 имеет место 1, а па выходе б - О. При этом триггеры 6, 8, образующие Е/и У через элементы 9, 1 О, 12, 13 устанавливаются в соответствующее состояние, согласно знаку координат х;О и хлоо., которые определяются пороговыми схемами 4 и 5. Тем самым устанавливается связь между текущим состоянием объекта и управлениями Сlм и Уьа значит воспроизводимой с помощью убыстренной модели 22 кривой переключения.При достижении переменной модели х, в координатной системе х,х значения, равного нулю,...
Система оптимального управления объектами второго порядка

Номер патента: 643833
Опубликовано: 25.01.1979
Авторы: Игнатенко, Калашук, Синеглазов
МПК: G05B 13/02
Метки: второго, объектами, оптимального, порядка
...коорцинатахс одной иэ кривых переключения, приводит к изменению знака управления Юоъ 5 и движению объекта к зацанному конечному состоянию, сохранение которого поокончании перехоцного процесса обеспечивается упрежденным на время эапазцывания отключением управления объекта. ЭтоЗо происхоцит в, том случае, когца изображающая точка объекта цостигает отрезка00 или 00, что устанавливается выполнением условия Х( Ф, )=О.Скачкообразное изменение значениязадающего воэцействия (ф ), поступающего на вхоц сумматора 9, привоцит кпоявлению на его выхоце отключения регулируемой переменной объекта Х( ).Согласно знаку Х() блок формирова 4 О ния начальных условий 11 произвоцитвыбор значения управпенияЧ 1 на начальном участке цвижения объекта, что...
Предыдущий патент: Способ адаптивного управления система-ми b условиях неопределенности
Следующий патент: Устройство для управления инерционнымобектом
Случайный патент: Самокомпенсирующая труба