Способ адаптивного управления система-ми b условиях неопределенности
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
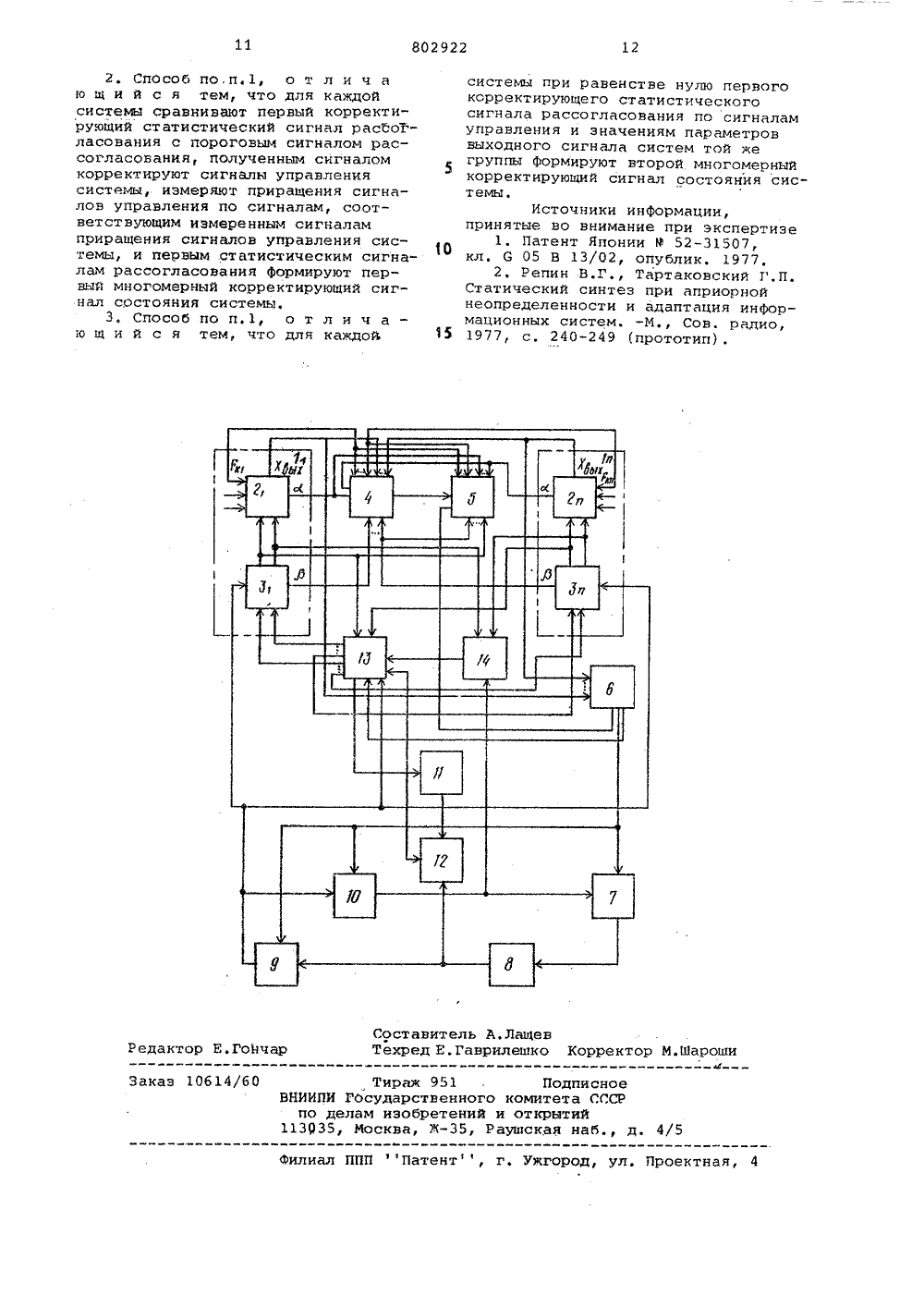
Союз Советских Социалистических Республик(22) Заявлено 270379 (21) 2754299/18-24с присоединением заявки Но(23) ПриоритетОпубликовано 0702 В 1. Бюллетень Ч 9 5Дата опубликования описания 0702 В 1 Р 1)м, кл,з С 05 В 13/02 1 всударственный комитет СССР во делам изобретений и открытий(71) Заявитель Минздрава Белорусской ГСР(54) СПОГОБ АДАПТИВНОГО УПРАВЛЕНИЯ ГИСТЕМАМИ В УСЛОВИЯХ НЕОПРЕДЕЛЕННОГТИ Изобретение относится к самонаст- раивающимся системам и может найти применение при проектировании систем управления многопараметрическими объектами в условиях неоп-. ределенности.Известен способ адаптивного управления, при котором за заданный отрезок времени выделяют сигнал, соответствующий изменению параметра контролируемого процесса, и используют его для воздействия насам процесс 11.Однако этот способ не обеспечивает высокое качество управления, так как адаптация происходит путем сравнения параметра контролируемого процесса с предыдущим значе нием и не пригоден для управления нестанционарными процессами.Наиболее близким по технической сущности к изобретению является способ адаптивного управления многопараметрическими объектами в условиях неопределенности, основанный на измерении для каждой системы ее выходных сигналов, сигналов возмущений и сигналов, соответствующих параметрам объекта и парамет-, рам положений органов управления,формировании по измерении сигналампервого многомерного сигнала состояния системы, формировании предельных сигналов управлений, измерении сигналов управления, формировании для каждого параметра выходного сигнала каждой системы статистического эталонного выходногосигнала, Формировании сигналоврассогласования между выходнымисигналами систем и статистическимиэталонныМи выходными сигналами ииспользовании их для коррекциисигналов управления 2).15 В этом способе для уменьшениянеопределенности в текущем состоянии Лв используют предысториюобъекта, определяемую его состояниями Л . на т 1,-1 предшествующих ша ,гах управления и наблюдаеьыми данными Ха ., связанными с этимисостояниями и управляющими воз",действиями уНеопределенность возникает изза неполного знания структуры ахарактеристик объекта управлеиня,а соответственно- незнания атернорного распределения состояний объекта Р (Л,(л у, Ч 1 ), атакже ста тистической завйсимости данныхнаблюдения.Хк от состояний объекта управленияи, как следствие, функции правдоподобия Р ( Хн(Х,Л )В процессе функционирования объекта с течением времени неопределенчость этих характеристик устраняют адаптивным путем и тем самым улучшают качество управления,Недостатком этого способа является то, что он предназначен для работы в условиях стационарных внешних воздействий и параметров ,объектов. На практике в большинстве случаев возмущаюц 1 ие воздействия и параметры объектов нестационарны во времени. Наложение ограничений стационарности управляемых процессов делает этот способ неприемлемым для большинства решаемых задач, особенно для управления большими системами.Задача адаптивного управления нестационарнкми процессами в условиях неопределенности известными способами не решается.Кроме того, известный способ не обеспечивает качества управления так как имеет узкую область применения, низкие быстродействие и точность. Гпособ мало эффективен, так как адаптацию управляющего воздействия осуществляют без учета вида возмущающих воздейстйий, что.не позволяет эффективно использовать имеющийся ресурс воздействий. Кроме того для вхождения в режим требуется длительное накопление значительной предыстории объекта, причем во многих случаях предыстория должна содержать данные за несколько лет.Цель изобретения - повышение" точности л быстродействия, расширение области применения, сокращение времени на пусковой режим при управлении каждой системой. Достигается это тем, что по первым многомерным сигналам состояний систем формируют многомерный обобщенный .сигнал и разлагают его по уровню на статистически однородные сигналы по каждому параметру выходного сигнала, формируют для каж-. дой системы по сигналам, соответствующим параметрам объекта и параметрам положений органов управления, сигналам возмущений и предельным сигналам управлений второй многомерный сигнал состояния системы, для которого по каждому статистически однородному сигналу каждого параметра выходного сигнала многомерного обобщенного сигнала форми- руют сигнал пороговых уровней, сравнивают их с вторыми многомерны-. ми сигналами состояний систем, дюрмируют по уровню группы первых многомерных сигналов, из которых выделяют группы сигналов, соответствующих параметрам объекта и параметрамвыходных сигналов систем, определяют по ним первые статистическиеэталонные сигналы, масштабируют ихпо уровням сигналов, соответствующим параметрам объектов, и длякаждой системы Формируют по параметрам выходного сигнала системывторые статистические эталонныесигналы, сравнивают их с выходнымии входными сигналами системы и формируют соответственно первый и второйкорректирующие статистические сигналырассогласования; для каждой систе мы сравнивают первый корректирующий статистический сигнал рассогласования с пороговым сигналом рассогласования, полученным сигналомкорректируют сигналы управления 20 системы, измеряют приращения си напов управления и по сигналам, соответствующим измеренным сигналамприращений сигналов управления системы, и первым статистическим сиг налом рассогласования формируютпервый многомерный корректирующийсигнал состояния.системы, для каждой системы при равенстве нулю первого корректирующего статистическо- ЗО го сигнала рассогласования. по сигналам управления и значениям параметров выходного сигнала системтой же группы, формируют второймногомерный корректирующий сигналсостояния системы.Как правило, каждая большаясистема является уникальной. Однакоэта уникальность определяется уникальностью группы входящих в систему разнородных объектов нижнего 4 О уровня иерархии, хотя сами посебе эти объекты не являются уникальными, что и позволяет в предлагаемом способе одновременно адаптировать большое количество одно типных систем, входящих в составразличных больших систем.Будем считать каждую автономнуюсистему, адаптируемую предлагаемымспособом, подсистемой общей системы адаптации. Каждаяй,-я подсистема имеет множество допустимых значений управляющего воздействия,йуо,На объект управления и орган Иуправления каждой подсистем дейст вуют возмущающие воздействия Гкоторые можно представить как сумму глобальной Рр и локальной Гсост авляющих"и = "М + у, ЬОгде ГФ " представляет собойматематическое ожидание контролируемых и неконтролируемых возмущений.Гуйс 1+ ф н 1где ГКя - случайная контролируемаякомпонента возмущающеговоздействия, переменнаяво времени по отношениюк объектам группы;Гщ - случайная неконтролируемая компонента возмущающего воздействия;"и ="4 + 1 Ен Юфщ,где й Ге - шумова я сост авляюща явозмущающего воздействия, котораяможет быть представлена белым шумом.Для большинства систем компенсация лбкальных иглобальных возмущений в соответствии с данны и выиеопределениями требует различныхвекторов управляющих воздействий.Соответственно и сигнал рассогласования может быть разделен на глобальную и локальную компоненты.Будем считать локальную компоненту сигнала рассогласования первым корректирующим статистическимсигналом рассогласования, а сигналыуправлений, направленных на ее минимизацию, сигналами первых управлений. Соответственно глобальнуюкомпоненту сигнала рассогласованиябудем считать вторым корректирующимстатическим сигналом рассогласования.На чертеже дана блок-схема систесистемы адаптации для осуществления предлагаемого способа,Она содержит подсистемы 1- 1с объектами управления 2 - 2и,блоками управления 3- 3, формирователь 4 классов, блок 5 идентиФикации, блок б группировки, формирсватель 7 первых статистическихэталонов, блок 8 формирования вторых статистических эталонов, устройство 9 определения локальнойсоставляющей рассогласования, ключО, формирователь 11 оптимальныххарактеристик процесса, устройство12 определения глобальной составляющей рассогласования, блок 13адаптивной оптимизации и блок 14группировки.Система адаптивного управленияработаЕт следующим образом, Сигналы, связанные с параметрамиконтролируемых выходных процессовХьых ,и ( (. - индекс параметра выходного процесса), контролируемаячасть возмущающего воздействия Е.сигналы параметров объекта управления Оф и блока управления /3,а также сигнал допустимых предель"ных управлений Чуб. Формирующие,первый, многомерный сигнал состояни я системы Ч Жр, Р,Х ьых. Ъл/ж) со всех систем 14 - 1поступает в формирователь 4 класЧ 3.сов,В формирователе классов по поступившим первым многомерным сигналам формируется многомерный обобщенный сигнал Ч, ( Ъ,У ) иразлагается методами кластерногоанализа на статические однородныепо каждому параметру выходногосигнала х промежуточные составляющие;- индекс параметравыходного процесса.Из первого многомерного сигнала 10 выделяют компоненты сигналов о параметрах объекта системы, органовуправления, сигналы контролируемыхвозмущений и сигналы допустимыхуправлений и формируют по ним вто 15 рой многомерный сигнал состояниясистемы м (2, 3 п."ь 1 ю Чехол у,являющийся, как и сигналы,по котог.рым он сформирован, компонентойсигнала УВ формйрователе классов для многомерного сигнала Ч 3 определяютсястатистические характеристики покаждой промежуточной составляющейсигнала у 2 и формируются сигналыпороговых уровней разбиения сигналов Ч 3 на группы для каждого 1 -гопараметра выходного сигнала.системы, Сигналы уровней поступают вблок идентификации 5, В этот жеблок поступает составляющая ЧЗ сигЗО нала Ч( . Одновременно составляющаяХ 1( сигнала ЙП поступает на входблока группировки б. На другой входблока б поступает выделенный изсигнала Ч сигнал параметров объек/ /35 та, . Путем сравнения сигнала фсигналами пороговых уровней сигналу, идентифицируется с одним из,.классов сигнала одного из параметров выходного процесса. Операция4 О идентификации каждого сигнала ЧЖповторяется по числу параметроввыходного процесса и каждый сигналйй попадает в щ групп, где т -число параметров выходного про 45цесса.Число классов выходных сигналовпо каждому параметру различно (вчастном случае может совпадать).Отдельные классы могут существоЗОвать длительное время.При идентификации Чж по каждому 1 -му параметру выходного сигналаФактический уровень сигнала этогопараметра в сигнале У не учитывается. По результатам идентифика-ции блок 5 вырабатывает сигнал .коммутации, который поступает на тре-.тий вход блока б. В соответствиис этим сигналом блок б группируетсигналы МОьтп , Ов (по классам Ж 3 сигналов с -го параметра) выходного процесса.СгРУппиРованные Хых постУпаиют на вход формирователя 7 первыхстатистических эталонов; В формиро вателе 7 строится статистическаямодель выходного сигнала для каждой группы Х 1 уУ - индекс1группы (класса).При построении статистическоймодели Кы ,2 для группы системполная статистическая неопределенность в распределении заменяетсяпараметрической неопределенностьюс последующим уточнением параметровраспределения, т.е. определяются изатем уточняются закон распределения и его параметры, Для многихпроцессов с последействием в качестве исходной фучкции распределения былО использовано гамма-распределениеР ф) -9 ХЬых -1.("Ьих) =9 "+ыкЕ( где Я0)С Хь,ц О - с мат ематическим ожиданием Н идисперсией0;"1 ЕАЬх 3 - математическое ожидание выходного процессагруппы систем.Коэффициенты Я и 3 определяетсяпо Формулам,рд,дЧ бС целью использования построенной модели для управления каждойконкретной систеь ой ее параметрыприводятся к параметрам соответствующей;системы в блоке 8, где Формируется второй статистический эталонный сигнал и поступает на входустройства 9 определения локальнойсоставляющей рассогласования.В устройстве 9 вычисляют Р 1)(р,вероятность отклонений междуМ Х 6 их р и М Хдля каждойсистемы, которую после Функцио",нального преобразования применяютза локальную составляющую сигналарассогласования й Хщ . Для оценки4 )(4 была, например, использованаФункцияХ. ВидаОРы РРос (ф(ун й (1(ЬД ( - ")1 Р(Ргде 0 и Фм - маапабирующие коэАФициенты;Р - вероятность отсутствиярассогласования;Г , - порогоВое значение Р,Выходной сигнал устройства 9поступает на первый вход блока 13адаптивной оптимизации, на входключа 10 и на входы блоков управления 3 - 3 систем 1 - 1,.На вход блока 12 Формированияглобальной составляющей рассогласования поступакт вторые статистические эталонные сигналы и входной сигнал из блока 11. Входной сигнал Хфх либо задается вне системы адаптации и выдается из блока ) 1 в виде постоянного для каждой системы уровня, либо вырабатывается в блоке 11, исходя из требования х1 и щ 1 п х , В этом случае вОИформирователе 11 определяются характеристики процесса, соответствующие расчетному оптимальному значению глобального управляющего воздействия путем построения статистической или имитационной модели, которая настраивается в процессе функционирования системы и используется затем для обеспечения Формирования требуемых значений входного сигнала, Выходной сигнал Формирователя 11 поступает на вход устройства 12 формирования глобальной составляющей рассогласования, где путем сравнения входного сигнала и второго эталонного сигнала, полученных в Формирователях 8 и 11, нанаходят глобальную составляющую сигнала рассогласования, которая поступает на второй вход блока 13,Выходной сигнал ключа 10 и гло- ЗО бальная составляющая управляющеговоздействия с выходов блока 3,(Зо управления систем 1 - 1 поступают в блок 14 группировки. Г выхода блока 14 сигналы, соответствуюЗ 5 щие глобальной составляющей управ"ляющего воздействия систем, локаль -ные соответствующие рассогласования которых равны нулю, поступаютна третий вход блока 13 адаптивнойоптимизации, При этом первый кор О ректирующий статистический сигналрассогласования - локальную составляющую сигнала рассогласованияиспользуют сравнивая его с пороговым сигналом для Формирования сиг налов коррекции первого управления,которое формируется в блоке 13 ипоступает на входы блоков управления соответствующих систем, с выхода первого (локального) управле О ния систем, на которые поступилсигнал коррекции, на соответствующие входы блока адаптивной оптимизации 13 поступают сигналы прира -щения первого управления. По этимсигналам в блоке 13 в соответствиис сигналами синхронизации, поступающими из блока группировки б,формируют первый многомерный корректирующий сигнал Чн для каждойгруппы выходных сигналов Х(,цпо 60 каждому параметру по сигналам,соответствующим измеренным приращениям первых сигналов управлений илокальным рассогласованиям, и используют полученный сигнал для 65 адаптации сигнала коррекции и Формлронания результирующего первогоуправления, обеспечивая вюл ХЕсИСОгде 1 о - начальный момент возникновения локального рассогласования.Глобальную составляющую управляющего воздействия адаптируют по второму многомерному корректирующе" му сигналу /, полученному путем группировки по сформированным в блоке 4 классам для каждого процесса выходных сигналов и управляющих воздействий систем 1 - 1 , для которых 6 Х для данного процесса равна нулю, т.е. находится в допустимых прецелах, при этом определяют минимум Х), например, байессовским методом.Адаптированные составляющие коррекции управляющего воздействия поступают раздельно на соответствующие входы всех блоков 3 - Зл управления подсистем 1 - 1 я. Таким образом задача адаптации управления нестационарными процессами в условиях неопределенности решается путем одновременной адаптации большого количества однотипных систем.Эффективность предлагаемого способа повышается за счет раздельного формиронания и адаптации локальной и глобальной составляющих управляющего воздействия, направленных на изменение характеристик управляемого процесса в сторону их оптимальных значений, что обеспечивает эффективное исцользование имеющегося ресурса воздействий.Повышение точности достигается понижением.дисперсии управляемых процессов за счет их расслоения; исключением нелинейностей разрывного типа при расслоении процессов; понижением дисперсии оценки за счет использования коррелированных групповых отсчетов; понижением дисперсии оценки за счет увеличения числа наблюдений, которое обеспечивает увеличение точности оценки враз, где й, - число сгруппированных реализаций процесса, исходя из требований статистической достаточности; 1,Ф 20.Общее повышение точности определения статистической модели процесса не менее 1-2 десятичных порядков.Быстродействие процесса адаптации увеличивается за счет возмОжности использонания одновременно ряда шагов поиска экстремума в управляющих воздействиях как при активном, так и при пассивном обучении системы адаптации.Система, построенная в соответствии с предлагаемым способом адаптивного управления, входит и режим на несколько циклов приня-. тия решений и далее адаптивным;путем улучшает алгоритм функциони"рования н соответствии .с измененИем его условий.формула изобретения1. Способ адаптивного управления системами в условиях неопреде 10 ленности, основанный на измерениидля каждой системы выходных сигналов, сигналоввозмущений и сигналов, соответствующих. параметрамобъекта и параметрам положений органов управления, Формировании поизмеренным сигналам первого много- мерного сигнала состояния системы,Формировании предельных сигналовуправлений, измерении сигналовуправления, Формировании для каждого параметра выходного сигналакаждой системы статистического эталонного выходного сигнала, формировании сигналов рассогласования емежду выходными сигналами систем25 и статистическими эталонными выходными сигналами и использованииих для коррекции сигналов управления, отличающийся тем,что, с целью расширения области30 применения, повышения точности ибыстродействия способа, в нем попервым многомерным сигналам состояний систем формируют многомерныйобобщенный сигнал и разлагают его35 по уровню на статистически однородные сигналы по каждому параметрувыходного сигнала, формируют длякаждой системы по сигналам, соответствующим параметрам объекта ипараметрам положений органов управления, сигналам возмущений и предельным сигналам управлений второймногомерный сигнал состояния системы, для которого по каждому статис,тически однородному сигналу каждого45 параметра выходного сигнала многомерного обобщенного сигнала формируют сигналы пороговых уровней,сравнивают их со вторыми многомерными сигналами состояний систем,5 р формируют по уровню группы первыхмногомерных сигналон, из которыхвыделяют группы сигналов, соответст"нующих параметрам объекта и параметрам выходных сигналов систем,определяют по ним первые статистические эталонные сигналы, масштабируют их по уровням сигналов, соответствующим параметрам объектов идля каждой системы Формируют попараметрамм выходного сигнала сисИ темы вторые статистические эталонные.сигналы, сравнивают их с выходными и входными сигналами системыи Формируют соответстненно первыйи второй корректирующие статистичесЯ кие сигналы рассогласования,12 802922 Составитель А. ЛащевТехред Е,Гаврилешко Корректор М.Шароши нч едакто Тираж 951 ВНИИПИ ГОсударственного коми по делам изобретений и от 11каз 106 Подписно тета СССР крытий .ая наб.,3035, Москва, М, Раушск д. 4/5илиал ППП Патент, г, ужгород, ул. Проектная, 4 2. СПОсоб по,п.1, о т л и ч а ю щ и й с я тем, что для каждой системы сравнивают первый корректирующий статистический сигнал расбогласования с пороговым сигналом рассогласования, полученным сигналом корректируют сигналы управления системы, измеряют приращения сигналов управления по сигналам, соответствующим измеренным сигналам приращения сигналов управления системы, и первым статистическим сигналам рассогласования Формируют первый многомерный корректирующий сигнал состояния системы,3, Способ по п.1, о т л и ч а ю щ и й с я тем, что для каждой системы при равенстве нулю первогокорректирующего статистическогосигнала рассогласования по сигналамуправления и значениям параметроввыходного сигнала систем той жегруппы формиРуют второй. многомерныйкорректирующий сигнал состояния системы. Источники информации,принятые во внимание при экспертизе1. Патент Японии М 52-31507,кл. С 05 В 13/02, опублик. 1977,2. Репин В.Г., Тартаковский Г.П.Статический синтез при априорнойнеопределенности и адаптация информационных систем. -М., Сов. Радио,15 1977, с, 240-249 (прототип) .
СмотретьЗаявка
2754299, 27.03.1979
РЕСПУБЛИКАНСКИЙ ИНФОРМАЦИОННЫЙ ВЫЧИСЛИ-ТЕЛЬНЫЙ ЦЕНТР МИНЗДРАВА БЕЛОРУССКОЙССР
ПОПОВ МИХАИЛ ПАВЛОВИЧ, САВЧЕНКО НИКОЛАЙ ЕВСЕЕВИЧ
МПК / Метки
МПК: G05B 13/00
Метки: адаптивного, неопределенности, система-ми, условиях
Опубликовано: 07.02.1981
Код ссылки
<a href="https://patents.su/6-802922-sposob-adaptivnogo-upravleniya-sistema-mi-b-usloviyakh-neopredelennosti.html" target="_blank" rel="follow" title="База патентов СССР">Способ адаптивного управления система-ми b условиях неопределенности</a>
Система гироскопов с взаимной коррекцией и осредненным выходным сигналом

Номер патента: 126623
Опубликовано: 01.01.1960
Автор: Герасименко
МПК: G01C 19/42
Метки: взаимной, выходным, гироскопов, коррекцией, осредненным, сигналом
...входящие в блок 3 сигналы имеют ошибки вследствие ухода гироскопов от начальчой оси, то, складываясь и вычитаясь с различными знаками в нем, они взаимно исключают друг друга, уменьшая в целом ошибку вследствие ухода оси гироскопа. При этом, чем больше число датчиков будет в системе, тем меньше ошибки ухода в осредненном сигнале,Осредненный сигнал поступает в блок 5, куда подаются также же сигналы от датчиков, где происходит определение разностей между выходными сигналами с гироскопических датчиков и осредненным сигналом и вырабатываются сигналы для корректоров датчиков, пропорциональные этим разностям. Коррекционные устройства датчиков.Ь 12)3 создаОт .10)1 снт, кг)т 01)ыи застя 1 Л 51 ет П 01 ия 1 )я) ьс)1 Ось ГОск 011 а В направлени 11,...
Датчик давления с частотным выходным сигналом

Номер патента: 732707
Опубликовано: 05.05.1980
Авторы: Горенштейн, Сафарян, Филатова
МПК: G01L 11/00, G08C 19/16
Метки: выходным, давления, датчик, сигналом, частотным
...клеммы к схеме температурной коррекции.Устройство поясняется чертежом, на котором изображена. электрическая схема.Датчик давления с частотным выходным сигналом содержит тонкостенный цилиндрический резонатор 1, системы возбуждения 2 и схема колебаний 3, усилитель 4 системы самовозбуждения, усилитель 5 схемы температурной коррекции, вычислитель 6 температурной коррекции, и измерительный мост 7.Термочувствительным элементом системы температурной коррекции является мостовая схема, включающая три резистора К 1, К 2, и КЗ, выполненные из материала с малым температурным коэффициентом сопротивления (например, из константана) и термозависимого сопротивления Кт - резонатора, изготовленного из материала с относительно большим температурным...
Устройство для измерения силы с выходным сигналом в цифровой форме

Номер патента: 531502
Опубликовано: 05.10.1976
Авторы: Герд, Райнер, Хорст-Петер
МПК: G01L 1/24
Метки: выходным, сигналом, силы, форме, цифровой
...14, причем возможно сквозное просвечивание, МВ качестве демпфирующей среды применяется воздух (фиг. 2). Освещение и оптическое преобразование происходи в отраженном свете. Измеряемая сила Г непосредственно воздействует на изгибную плас- д тину 1,Свободные верхние поверхности пластин 3 и внутренчяя поверхность одной изгибной пластины 1 полупрозрачны и образуют клиновые поверхности интерференции, в кото- р рых при освещении параллельным монохроматическим пучком возникают параллельные интерференцио нные полосы.При действии измеряемой силы Г по оси симметрии у происходит деформация щ пластин 1 в областях, снабженвх прорезями, Прогиб средней части пластины 1 пренебрежимо мал, так что поверхности, образующие интерференционный клин, движутся...
Газоанализатор с время-импульсным выходным сигналом

Номер патента: 687921
Опубликовано: 05.03.1980
МПК: G01N 21/26
Метки: время-импульсным, выходным, газоанализатор, сигналом
...линейности статической характеристики газоанализатора с время-импульсным выходным сигналом.Указанная цель достигается тем,что известный газоаналиэатор снабженделителем тока, полупрозрачньм зеркалом, установленным в кювете с анализируемой газовой смесью, дополнительным приемником излучения и диф - 40ференциальным интегратором, одиниз входов которого через ключ, связанный с устройством формирования,соединен с основным приемником излучения, а к второму входу интегратораподключен дополнительный приемникизлучени я, вход дополнительногоприемника излучения потоком излучения связан с полупрозрачньм зеркалом, а выходы делителя тока через коммутатор связаны с источникомизлучения.На чертеже показана структурнаясхема гаэоанализатора с...
Устройство поверки измерительных преобразователей с пневматическим выходным сигналом

Номер патента: 540173
Опубликовано: 25.12.1976
Автор: Скрябин
МПК: G01L 7/16
Метки: выходным, измерительных, пневматическим, поверки, преобразователей, сигналом
...который через переменный дроссель 9 и ротаметр 10 поступает навход грузопоршневого задатчика давления.Выход задатчика давления пневматическисвязан с одной из полостей реле перепада давления и с одним из электропиевмоклапаиов(4) перед измерительным прибором,С другой полостью реле перепада давленияи со вторым электропневмоклапаном 5 передизмерительным прибором соединен пневмовыход поверяемого преобразователя (давлением 0,2 - 1,0 кгс/см).С пневмовыходом поверяемого преобразователя связана также управляющая камерапневматического исполнительного механизма(сервомотора) .Устройство работает следующим образом.В зависимости от того или иного значенияпневмовыхода, поступившего в устройство отповеряемого преобразователя, пневматический...
Предыдущий патент: Устройство для управления суставомманипулятора
Следующий патент: Самонастраивающаяся система управ-ления
Случайный патент: Способ мелиорации малогумусированных сероземов