Круговой интерполятор
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
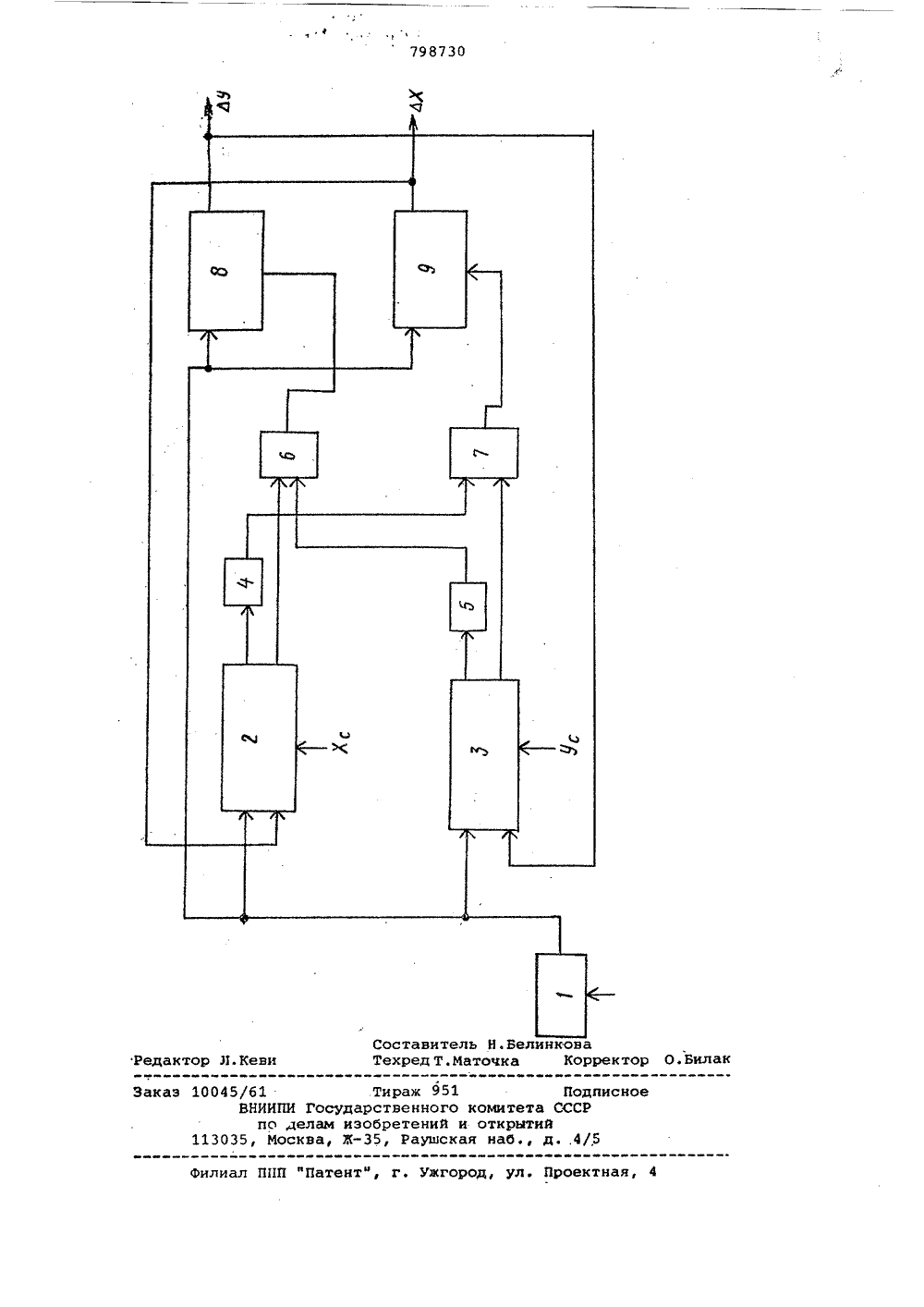
пте ,иь с.а 1 ь АФ Союз Советския Социалистических Яеспублнк(22) Заявлено 271178 (21) 2690144/18-24 с присоединением заявки йо 51 М Кз С 05 В 19/415 Государственный комитет СССР по делам изобретений и открытий(71) Заявитель Харьковский ордена Ленина политехнический институт им. В.И.Ленина(54) КРУГОВОЙ ИНТЕРПОЛЯТОР Изобретение относится к числовому программному управлению металло- режущими станками.Известен круговой интерполятор для контурных систем программного з управления, содержащий интегратор линейной скорости, регистр программируемой линейной скорости, интеграторы синуса и косинуса угла наклона радиуса окружности, накопители 10 координатных приращений, схемы управления приводами, схемы окончания интерполирования, регистры конечных значений координат, регистр программируемого радиуса, схему 15 формирования входной частоты, шифратор, схему определения приведенного радиуса и два вентиля.Интерполятор осуществляет вычисление координат обрабатываемого конту ра деталей с дугами различных радиусов, причем диапазон изменения радиуса разбивается на несколько ступеней, каждый иэ которых соответствует свой объем интеграторов. Изменение 25 объемов интеграторов достигается путем изменения цены дискрет этих интеграторов 11.Однако конструктивные особенности интерполятора позволяют использовать 30 его в системах числового программного управления (ЧПУ) преимущественно для станков с малыми скоростями пода чи, так как скорость вычисления интерполятора ограничена, допустимой тактовой частотой. Увеличение скорости подачи станка требует повышения тактовой частоты интерполятора, поэтому точность вычислений на высоких тактовых частотах низкая, что ведет к недостаточной точности обработки деталей.Известен также круговой интерполятор для контурных систем программного управления станками, содержащий интегратор линейной скорости, регистр программируемой линейной скорости, интеграторы синуса и косинуса угла наклона радиуса окружнос ти, накопители координатных приращений, блоки управления приводами, блоки окончания интерполирования, регистры конечных значений координат регистр программируемого радиуса, блок определения величины дискреты подинтегральных функций и два вентиля.В таком интерполяторе при обработке деталей, имеющих дуги различных радиусов, обеспечивается постаянство задания линейной скорости обработки. Для этого увеличивают угловую скорость перемещения обрабатывающего инструмента обратно пропорционально радиусу, что достигается увеличением цены дискреты интеграторов синуса5 и косинуса угла наклона радиуса окружности, Ввиду этого тактовая частота на выходе интерполятора неизменна и в результате сокращается время обработки контура обрабатываемой детали 2 ).Однако конструктивные особенности этого интерполятора позволяют испольэовать его в системах числового программного управления только для станков сь малыми скоростями подачи. 15 Скорость вычисления координат отрабатываемого контура также ограничена допустимой тактовой частотой интерполятора. Обработка деталей на малых скоростях подачи ухудшает техноло- Щ гичность и производительность обработки, а повышение скоростей подачи приводит к необходимости увеличения тактовой частоты интерполятора, что снижает точность вычисления, и следо вательно, не обеспечивает требуемой точности обработки деталей,Наиболее близким по технической сущности к предлагаемому является круговой интерполятор, осуществляющий вычисление координат обрабатывае- ЗО мого контура при высоких скоростях подачи станка, содержащий интегратор координаты Х, интегратор координаты У и интегратор угловой скорости,выход которого соединен с первым входом каждого иэ упомянутых интеграто- ров, Второй вход интегратора координаты Х соединен с выходом интегратора координаты У, а второй вход интегратора координаты У - с выходом ин тегратора координаты Х.Интерполятор работает по принципу накапливающего сумматора. В качестве приращений используется величина приращений центрального угла дуги обрабатываемого контура. Приращения выражаются многоразрядньпи числами. Шаг интерполяции, пропорциональный заданной линейной скорости, выбирается более величины дискреты, ввиду чего 50 вычисления координат в интерполяторе происходит при больших скоростях подачи станка на постоянной минимальной частоте (10020 Гц), определяемой следящим приводом станка 31. 55Однако такой интерполятор в силу своих конструктивных особенностей не может обеспечить требуемой точности. вычислений координат обрабатываемого контура. Погрешность интегри рования в интерполяторе значительная, точность интерполирования недостаточная, а следовательно, данный интерполятор не обеспечивает требуемойточности обработки деталей. 65 Цель изобретения - повышение точнОсти интерполятора.Поставленная цель достигаетсятем, что круговой интерполятор, содержащий первый интегратор и в каждой координате интерполирования второй интегратор, первый вход которогосоединен с выходом первого интерполятора, в каждую координату интерпо-.лирования введены делитель, сумматор и третий интегратор, первый входкоторого соединен с выходом сумматора, второй вход - с выходом первого интегратора, а первый и второйвыходы второго интегратора - соответственно с входом делителя и спервым входом сумматора данной координаты интерполирования, причем:ыход делителя и выход третьего интйгратора каждой координаты интерполирования подключены к второмувходу сумматора и второму входу второго интегратора соответствующейкоординаты интерполирования.На чертеже схематически представлено предлагаемое устройство.Устройство содержит первый интегратор 1, вторые интеграторы 2 и3, делители 4 и 5, сумматорьР б и 7,третьи интеграторы 8 и 9,Устройство работает следующим образом,В исходном состоянии в регистрподинтегральной функции интегратора 1 вводится величина угловой скорости, а в регистры подинтегральныхфункций интеграторов 2 и 3 - соответ.ственно координаты начальной точкидуги окружности Хо и Уо . Аргументомпри интегрировании скорости являетсявремя с, Приращения аргумента Ь Ьпредставляют собой единичные импуль"сы, следующие с постоянной тактовойчастотой Г. Интегрирование производят по центральному углу дуги ОЕ,Интегратором 1 вырабатываютсяприращения центрального угла дугидс(. Сигнал, соответствующий значению дс., поступает на входы интеграторов 2, 3, 8 и 9 в качестве независимой переменной.В результате интегрирования на выходе интеграторов 2 на каждом шагеполучают приращение текущей координаты А( , а на выходе интег%раторае 3 - прйращение текущей координаты дХПосле деления на два%на первый вход сумматора б поступает сигнал, соответствующий дХ 2, а на первый вход сумматора 7 - сигнал, соответствующий ЬУ/2. На вторыеКвходы сумматоров б и 7 поступают сигналы, соответствующие содержимому регистров подинтегральных функций интеграторов 2 и 3: на вход сумматора б - Х, на вход сумматора 7 У, После сложения на выходе срматора б получают величину(ХЮ -У-) а на выходе сумматора 7 - велчинуУ Э ЙЪ-), которые записываются врегистр подинтегральных функций соответственно интеграторов 8 и 9,С выходов интеграторов 8 и 9многоразрядные приращения ьХ и дупоступают на входы накопительныхрегистров интеграторов 2 и 3 соответственно.С приходом на вход интегратора 1следующего импульса с частотой циклвычислений повторяется.Погрешность вычисления в предлагаемом интерполяторе уменьшена по сравнению с известным при условии равенства скорости подачи и радиуса об"рабатываемой дуги.Уменьшение погрешности иьтегриро- фвания повышает точность интерполирования не менее, чем на порядок, ввиду чего повышается точность обработки деталей на станках, использующихсистему числового программного управления с предлагаемым круговым интерполятором,Формула изобретения. Круговой интерполятор, содержащий первый интегратор и в каждой координате интерполирования второй интегратор, первый вход которого соединен с выходом первого интегратора, о тл и ч а ю щ и й с я тем, что, с цельюповышения точности интерполятора,в каждую координату интерполированиявведены делитель, сумматор и третийинтегратор, первый вход которого соединен с выходом сумматора, второйвход - с выходом первого интегратора, а первый и второй выходы второгоинтегратора - соответственно с входом делителя и с первым входом сумматора данной координаты интерполирования, причем выход делителя и выходтретьего интегратора каждой координаты интерполирования подключены к второму входу сумматора и второму входу второго интегратора соответствующей координаты интерполирования.Источники инФормации,принятые во внимание при экспертизе1. Авторское свидетельство СССР9484502, кл. С 05 В 19/18, 1974.2. Авторское свидетельство СССР Р 499566, кл. 6 05 В 19/18, 1974.г /3. Сб.Станки с числовым программным управлением, участки и автоматические линии на их основе". М., "Машиностроение", 1974, с. 98 (про- тотип).798730 Составитель Н.БелинковаТехред Т.Маточка Корректор О,Билак Редактор Л.Кеви а илиал ППП "Патент", г, ужгород, ул. Проектная 10045/61 Тираж 951 Подписное ВНИИПИ Государственного комитета СССР по делам изобретений и откритий 113035, Москва, Ж, Раушская наб., д.,4/5
СмотретьЗаявка
2690144, 27.11.1978
ХАРЬКОВСКИЙ ОРДЕНА ЛЕНИНА ПОЛИТЕХНИЧЕСКИЙИНСТИТУТ ИМ. B. И. ЛЕНИНА
НЕШВЕЕВ ВИТАЛИЙ ВЛАДИМИРОВИЧ, ТРОЙНИКОВ ВАЛЕНТИН СЕМЕНОВИЧ
МПК / Метки
МПК: G05B 19/4103
Метки: интерполятор, круговой
Опубликовано: 23.01.1981
Код ссылки
<a href="https://patents.su/4-798730-krugovojj-interpolyator.html" target="_blank" rel="follow" title="База патентов СССР">Круговой интерполятор</a>
Преобразователь координат 4-х мерного пространства

Номер патента: 477427
Опубликовано: 15.07.1975
Автор: Будрин
МПК: G06G 7/22
Метки: координат, мерного, пространства
...к этим клеммам, 20 в квадратуреМодуляторы 14 - 17 получают опорные напряжения извне (из блока питания, например). Для модуляторов 18 - 20 опорные напряжения вырабатываются в самом преобразо вателе, Для этих целей служат модуляторы15, 17 и 19, которые являются вспомогательными. Модуляторы 14, 16, 18 и 20 являются основными, их выходные напряжения непосредственно используются дляопределения ЗО углов , в, у. К входной клемме 1 (1) подключен один модулятор 20. Выходные напряжения тех и других модуляторов последовательно суммируются между собой на сумматорах 21 - 27, В результате суммирования З 5 получаются следующие напряжения:и= х япЫ + усозЫ = ГХ + у"яп(Ы+ ),40 и = х созЫ + уяпЫ = /х + усоз (Ы+ ),из= ГХ+у з 1 п(Ы+) +г соз(Ы+р) =45= ф х+у...
Цифровой интегратор

Номер патента: 720427
Опубликовано: 05.03.1980
Авторы: Данчеев, Ермаков, Кузьмин, Смирнов
МПК: G06J 1/02
Метки: интегратор, цифровой
...и - число разрядов блока 1 и регистра 4, Приращения Ь у и ь 1 подаются на входы блока 1 и блока итераций 3 в первом такте итерации, когда на второй вход сумматора 5 подается значение младшего разряда регнста 4 . в котором хранится значениерантекущего времени С. В блоке 1 в ко -цв каждой итерации образуется текущее значение подынтегральной функцииУ =Е. лУй),Е1а в сдвиговом регистре 4 (при нулевом начальном значении) " текущеезначение времени1= Г ь,Ь),с,Если на некотором такте итерации31 11на выходе регистра 4 появился 0 , 26а на первом выходе сумматора 5 образовалась 1, то элемент И 2 отпирается и пропускает на выход устройства от блока 1 очередное значениег(М,25Напоследовательности итераций1, 2, 3, 4.выходной поток приращений...
Цифровой интегратор

Номер патента: 739566
Опубликовано: 05.06.1980
Авторы: Кошкин, Кузьмин, Куприянов, Шубина
МПК: G06J 1/02
Метки: интегратор, цифровой
...И 5, первый вход которого подключен к первому выходу блока итераций 4, второй выход которого подключен к управляющим входам регистра 1 подинтегральной функции и регистра 2 сдвига, выход которого подключен к его входу, а также через элемент НЕ 6 подключен к входу элемента задержки , выход которого 2 ф подключен к второму входу первого элемента И 3, входу блока итераций 4 и к второму входу второго элемента И 5, выход которого подключен к входу первого разряда регистра 2. Первый вход первого элемента И 3 подключен к выходу регистра подинтегральной функции, а выход к выходу 8 интегратора.Интегратор работает следующим образом.В исходном состоянии регистр 2 сдви- я га обнулен, а в регистре 1 подинтегральной функции записано значение...
Цифровой интегратор

Номер патента: 879586
Опубликовано: 07.11.1981
Авторы: Боюн, Козлов, Терещенко
МПК: G06F 7/64
Метки: интегратор, цифровой
...одно 795866разрядного сумматора. Осуществляется умножение на К разрядов множителя за счет введения в блок умножения буферного регистра. Верхний предел размера буферного регистра в битах определяется соотношениемгде Т - быстродействие П-разрядно"йпго сумматора;Т - быстродействие однораэрядноЕ)15 го сумматора.Буферный регистр 13 сотоит из двухразрядов. Два разряда множителя, находящиеся в регистре 13, считываютсяс него и поступают на блок элементов 20И-НЕ. Умножение осуществляется известным способом: умножение содержимого регистра множимого 14 на два разряда множителя. За время сложенияв сумматоре 16 в буферном регистренакапливается два новых разряда множителя.Регистр остатка 17 введен для повы"шения точности интегрирования,...
Устройство для преобразования координат точек

Номер патента: 960854
Опубликовано: 23.09.1982
МПК: G06G 7/22
Метки: координат, преобразования, точек
...системы координат содержит три инвертора, три интегратора5 Ои шесть умножителей, причем выходпервого инвертора соединен с первымвходом первого умножителя, выход которого соединен с первым входом первого интегратора, выход которого соединен с первым входом второго умно 55жителя, выход которого соединен спервым входомвторого интегратора,выход которого соединен с первым вхо 7 9608548Бсли на входы чэтого преобра, зователя задать напряжения, пропорциональные координатам любой точкирр, 1 р ), то на выходах 1-3 этого преобразователя получим координаты Гхр(С), у (С), р(С)3 той жеточки во вращающейся системе координат.Поэтому, когда число точек и3,надобность в масштабирующих суммато врах устройства отпадает, а само устройство...
Предыдущий патент: Интерполятор
Следующий патент: Многоканальное устройство для управленияшаговыми двигателями
Случайный патент: Устройство для суммирования частичных произведений