Устройство для управления адаптивным роботом
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
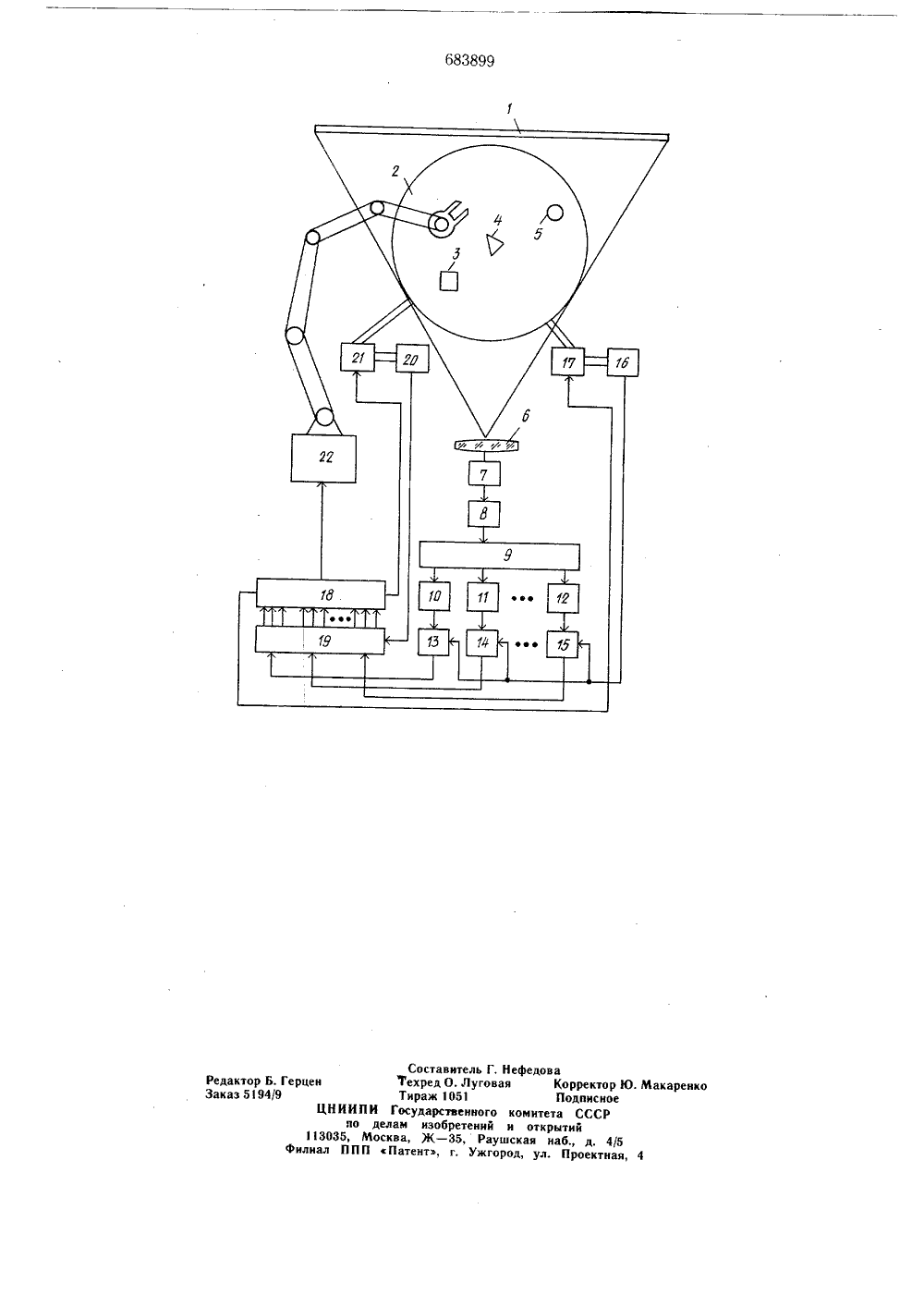
1; Э ОП ИСАНИЕ ИЗОБРЕТЕН ИЯ К АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз Советских Социалистииеских Республик(61) Дополнительное к авт. свид-ву -1) М. Кч 2) Заявлено 23.08.74 присоединением заявк 1) 2056396/25-2 25 ) 13 осудврстввннын квинтет СССР но делам нзобретвннй н аткрытнй(54) УСТРОИСТВО ДЛЯ УПРАВЛЕ АДАПТИВНЪМ РОБОТОМ Изобретение относится к области робо- техники и может быть использовано при создании промышленных роботов, способных определять форму и местоположение объектов манипулирования.Известно устройство для управления адаптивным роботом, содержащее телевизионные камеры, процессоры, электронно-вычислительную машину и исполнительные приводы робота ). Оно является сложным, дорогостоящим и служит для распознавания только детерминованных объектов.Наиболее близким техническим решением к данному изобретению является устройство, содержащее излучатели, фотоприемники, соединенные с блоками считывания, и последовательно соединенные блок памяти, электронно-вычислительную машину и приводы исполнительного органа робота 2.Данное устройство не позволяет всегда точно определять форму и ориентацию отдельно стоящих объектов и определять количество и взаимную ориентацию относительно друг друга группы объектов.Целью изобретения является расширение функциональных возможностей устройства. Сущность изобретения заключается втом, что устройство содержит привод и датчик вращения рабочего стола, привод и датчик вертикального перемещения рабочего стола, преобразователи угол в к, вычисли тели координат и последовательно соединенные диссектор, формирователь строб-импульсов и логический блок, каждый выход которого через последовательно соединенные преобразователь угол-код и вычислитель 1 Окоординат подключен к входу блока памяти, соответствующий вход которого соединен с выходом датчика вертикального перемещения рабочего стола, связанного с приводом вертикального перемещения рабочего стола, вход которого подключен к первому выходу электронно-вычислительной машины, второй выход которой соединен со входом привода вращения рабочего стола, связанного с датчиком вращения рабочего стола выход которого подключен к соответствующим входам вычислителей координат.20 На чертеже изображена функциональная схема устройства для управления адаптивным роботом.35 40 Устройство содержит излучатель 1; рабочий стол 2; объекты 3, 4, 5 манипулирования; приемный объектив 6; диссектор 7; формирователь 8 строб импульсов; логический блок 9; преобразователи 10, 11. 12 угол-код вычислители 13, 14 5 координат; датчик 16 вращения рабочего стола; привод 17 вращения рабочего стола; элект ронно-вычислительная машина 18; блок 19 памяти; датчик 20 вертикального перемещения рабочего стола; привод 2 вертикального перемещения рабочего стола; приводы 22 исполнительного органа робота. Устройство работает следующим образом.При расположении об ьектов 3- - 5 на рабочем столе 2 изображение излучателя 1 на фотокатоде диссектора 7, сформирован ное с помощью приемного объектива 6, представляет собой прерывистую светлую линию, считывание которой диссектором 7 приводит к возникновению на его выходе периодических (с частотой сканирования диссектором) широтно-импульсных сигналов. Информация об углах визирования начальной и конечной границ объектов 3 - 5, затеняющих собой соответствующие части излучателя 1 из точки наблюдения, связанной с приемной апертурой объектива 6, сосредоточена во временном положении фронтов и спадов импульсов лля указанной широтно-импульсной периодической последовательности, причем временное положение фронтов и спадов чередуется, что позволяет формировать временные стробы в формирователе 8 строб-импульсов, соответствующие последовательностям фронтов и спадов раздельно в пределах каждого из периодов сканирования диссектором, а также производить группировку этих строб-импульсов в логическом блоке 9 по принадлежности их к визуапизации того или иного объекта 3 - 5 при последовательном сканировании рабочей зоны малым мгновенным углом зрения, формируемым при работе диссектора 7. Для упрощения рассуждений будем полагать сначала, что на столе установлен только один объект. При этом с первого выхода логического блока 9 на вход преобразователя 10 угол-код будут приходить строб-импульсы раздельно от фронтов широтно-импульсной последовательности (в одном ее периоде при этом будет содержаться только один прямоугольный импульс) и от спадов с частотой следования, равной частотс развертки, подаваемой на диссектор , Временные положения этих стробов однозначно соответствуют азимутам начальной границы данного объекта (начальной границы затенения линейного осветителя по ходу сканирования диссектором) - для строб-импульсов фронтов широтно-импульсной последовательности, а также азимутам конечнои границы этого объекта - для строб-импульсов спадов широтно-импульсной последовательности. Азимуты отсчитываются от исходного положения визирования рабочего поля диссектором 7, например слева от центра стола, то есть отсчет времени происходит от момента начала развертки по каждой строке в диссекторе 7. Временные интервалы в преобразователе 10 угол-код представляются двоичным кодом, отвечающим данному азимуту визирования той или иной границы объекта, наблюдаемой входным зрачком приемного объектива 6 при данном угловом положении рабочего стола 2. При повороте рабочего стола 2 на некоторый дискретный угловой интервал (например на 1,164 от полного оборота, т. е. на 5,625") тот же объект наблюдается фактически уже с другого ракурса, поэтому значения азимутов его начальной и конечной границ, вообще говоря, изменяются, то есть изменяется код на выхсде преобразователя 1 О угол-кол для соответствующих текущих (дискретных) зна чений азимутов. При этом в вычислителе 13 координат, связанном с выходом преобразователя 10 угол-код и с выходом датчика 16 вращения, определяются координаты точек пересечения двух групп азимутов: азимутов начальных границ объекта для смежных дискретных положения рабочего стола 2 по углу его поворота приводом 17 вращения рабочего стола и азимутов конечных границ этого объекта для тех же смежных дискретных угловых положений рабочего стола 2. ир ;-м точки пересечения вычисляемые в вычислителе 13 координат аналитическим путем, являются вершинами многоугольника, описанного вокруг данного объекта на высоте его сечения линиями визирования в сканирующем режиме. Таким образом, для двух смежных дискретных угловых положений стола вычислитель 13 координат определяет в цифровом коде координаты двух вершин такого многоугольника (эти вершины существенно разделены между собой в плоскости многоугольника, но не обязательно являются его оппозитными вершинами). Для следуощего дискретного поворота рабочего стола 2 вычислитель 13 координат определит коды двух других вершин многоугольника, каждая из которых достаточно близко расположена к предыдущим вершинам, поскольку для построения этих новых двух вершин используется пара азимутальных направлений из предыдущего вычисления вершин, и т. д. Приблизительно на пол-оборота рабочего стола 2 вычислителя 13 координат построим все вершины (для данного примера их будет 642 = 28 вершин) описанного многоугольника, контур которого с большой степенью точности будет характеризовать выпукло-преобразованный контур данного объекта в данном сечении его линиями сканирования (на данной высоте от плоскости стола). Эта информация о контуре данного объекта, задаваемом вершинами описанного многоугольника, накапливается в блоке 19 памяти раздельно для каждого из дискретных вертикальных перемещений рабочего стола 2 приводом 21 вертикального перемещения, для чего высота положения стола контролируется датчиком 20 вертикального перемещения и соответствующие дискретные сигналы передаются на общий для всех каналов вход блока 19 памяти. По мере поворота рабочего стола 2 на угол, несколько больший 80 (отвечающий полному построению описанного многоугольника на соответствующих его вершинах для данного сечения сканирования), плоскость рабочего стола 2 дискретно изменяет свою высоту относительно горизонтальной плоскости, в которой лежат излучатель 1 и входной зрачок приемного объектива 6, благодаря действию привода вертикального перемещения. После этого цикл вычисления вершин нового описанного многоугольника повторяется, описывая с большой точностью новый выпукло-преобразованный контур объекта в его новом сечении, параллельном прежнему сечению. В результате таких последовательных вертикальных перемещений плоскости рабочего стола 2 в блоке 19 памяти накапливается полная информация о координатах объемного выпукло-преобразованного контура данного объекта. Точность описания координат выпукло-преобразованной поверхности объекта (то есть поверхности, не содержащей впадин) определяется дискретами поворота стола приводом 17 вращателя и приводом 21 вертикального перемещения стола, причем приводы 17 и 21 управляются по программе задаваемой управляющей электронно-вычислительной машиной 18, в которую поступают сведения об объемной форме и местоположении группы объектов с выходов блока 19 памяти и в которой принимаются решения: об идентификации выявленных форм объектов с некоторыми эталонами, заложенными . в память электронно-вычислительной машины 18, об алгоритме дополнительного выявления формы тех объектов, которые не удалось выявить с необходимой полнотой вследствие затенения этих объектов другими объектами при визуализации группы объектов, одновременно расположенных на столе, о выработке тактики моторного поведения исполнительного органа робота по правильному захвату объектов в нужной по программе поставленной технологической задачи последовательности, а также о распределении управляющих воздействий и о самих величина, таких воздействий, поступающих к приводам 2 исполнительного органа робота 22Применение изобретения позволит выявить форму и местоположение как отдельно стоящих, так и группы объектов манипулирования, что позволит осуществлять их качественный захват.Формула изобретениияУстройство для управления адаптивнь 1 мроботом, содержащее излучатель и последовательно соединенные блок памяти, электронно-вычислительную машину и приводы исполнительного органа робота, отличающееся тем, что, с целью расширения функциональных возможностей устройства, оно содержит привод и датчик вращения рабочего стола, привод и датчик вертикального перемещения рабочего стола, преобразователь угол-код, вычислители координат и последовательно соединенные диссектор, формирователь строб-импульсов и логический блок каждый выход которого через последовательно соединенные преобразователь уголкод и вычислитель координат подключен к зовходу блока памяти, соответствующий вход которого соединен с выходом датчика вертикального перемещения рабочего стола, связанного с приводом вертикального перемещения рабочего стола, вход которого подлючен к первому выходу электронно-вычисЗ 5 лительной машины, второй выход которойсоединен со входом привода вращения рабочего стола, связанного с датчиком вращения рабочего стола, выход которого подключен к соответствующим входам вычислителей 40координат.Источники информации, принятые во внимание при экспертизеСоста н Техред Тираж ЦНИИПИ Государс по делам изо 113035, Москва, Ж -илиал П П П Патентз. Макаренк дактор Б. Герцеказ 5194/9 внтель Г. НефедоваО. Луговая Корректор Ю1051 Подписноетвенного комитета СССРбретений и открытий35, Раушская наб., д. 4/5г. Ужгород, ул. Проектная,
СмотретьЗаявка
2056396, 23.08.1974
МЕНЬШИХ ОЛЕГ ФЕДОРОВИЧ, ЛУНЕВ СЕРГЕЙ МИХАЙЛОВИЧ, БОРИСОВ ДМИТРИЙ АНАТОЛЬЕВИЧ, КРАВЧЕНКО СЕРГЕЙ СЕРГЕЕВИЧ
МПК / Метки
МПК: B25J 13/00
Метки: адаптивным, роботом
Опубликовано: 05.09.1979
Код ссылки
<a href="https://patents.su/4-683899-ustrojjstvo-dlya-upravleniya-adaptivnym-robotom.html" target="_blank" rel="follow" title="База патентов СССР">Устройство для управления адаптивным роботом</a>
Устройство для контроля за вертикальными перемещениями объекта

Номер патента: 1081419
Опубликовано: 23.03.1984
Авторы: Гашков, Гойхман, Расходчиков, Рожков, Сессаревский, Терехин, Штейн
МПК: G01D 5/04
Метки: вертикальными, объекта, перемещениями
...смонтирован на измеритепьном стержне с воэможностью 45 вертикального перемещения вдопь него и фиксации. 2Нв фиг. 1 схематично изображено устройство цпя контропя эа перемещениемобъекта, общий виц; на фиг. 2 - обгоннаямуфта пентопротяжного механизма.Устройство цпя контроля эв перемещением объекта содержит корпус 1, жесткоприкрепленный к стержню 2, эагпубпяемому в баппвст жепеэноцорожного пути.В корпусе 1 установлен подпружиненныйотноситепьно него измерительный стержень 3, к которому жестко прикреппенкпин 4, взаимодействующий скошеннойстороной, имеющей различные углы накпонвви с, с лентопротяжным механизмомцпя вращения катушек 5 и 6,Измерительный стержень 3 закреппенс помощью зажима 7 на подошверельса 8,Кпин 4 установлен с возможностью...
Устройство для вертикального перемещения объекта

Номер патента: 419472
Опубликовано: 15.03.1974
Авторы: Изобретени, Монин, Рыбчинский, Шехтер
МПК: B66F 11/00
Метки: вертикального, объекта, перемещения
...петли замкнутого стропа 6 охватывают коуши 20 переходиков 8, далее проходят по группе направляющих двухручьевых блоков 21 и охватывают парой петель 22 пару тянущих блоков 10 привода. У каждого уравнительного коуша (10, 19, 20) имеется контрольный зажим 23. У коушей 10 этот зажим выполнен парным в едином корпусе, Каждый зажим 23 имеет две пластины 24, которые сжимают канат с помощью болтового соединения 25, а в зазоре между пластинами установлены сквозные пальцы 26 (это могут быть шпильки), которые направляют и изгибают канат при прохождении его сквозь зажим 23. Для каждой ветви каната, по меньшей мере, имеется три пальца 26. Такое устройство зажима разрешает плавно изменять усилие фиксации каната и позволяет частичное проскальзывание...
Устройство для перемещения объектов в рабочую зону

Номер патента: 1122503
Опубликовано: 07.11.1984
Авторы: Галич, Завилинский, Исьянов, Черепин
МПК: B25J 11/00
Метки: зону, объектов, перемещения, рабочую
...59, содержащий корпус 60, на одной из продольных сторон 61 которого установлены неподвижные губки в виде роликов 62 и 63, а на другой стороне 64 - подпружиненные губки в виде роликов 65 и 66. Перемещение роликов 65 и 66 под действием пружин 67 ограничено регулируемой шайбой 68. На поперечной стороне 69 корпуса 60 в направляющей 70 установлена подпружиненная опора 71, перемещение которой под действием пружины 72 ограничено головкой винта 73.На продольных сторонах 61 и 64 корпуса 60 на осях 74 и 75 установлены упорные поворотные подпружиненные собачки 76 и 77. Оси 74 и 75 охвачены торсионными пружинами 78 и 79; одни концы которых взаимодейст вуют с собачками 76 и 77, а другиес упорами 80 и 81, закрепленнымив корпусе 60, Поворот собачек...
Оптико-электронное устройство для измерения непрямолинейности перемещений объектов

Номер патента: 1583740
Опубликовано: 07.08.1990
Автор: Асатрян
МПК: G01B 21/20
Метки: непрямолинейности, объектов, оптико-электронное, перемещений
...кана- геометрией конструкции направляющих,ла 7. Опорный канал 8 идентичен изме- неточностью их изготовления, влияниярительному каналу 7 й также состоит силовых и тепловых факторов и т.п,из фотоприемника 22 и 23, оптических При смещении рабочего органа 12 поблоков 24 и 25, закрепленных в корпу- оси ОЕ происходит смещение измерительсах 2 Ь и 27, и диафрагм 28 и 29, ного канала 7 относительно пучковОптические блоки 15 и 16, 24 и 25 1 О 3 и 4, При этом освещенность фотоидентичны по конструкции и представ- приемников 13 и 14 меняется одинаколяют собой два цилиндрических тела . во, так как смещение пучков 3 и 4 рав(фиг.2), сопряженных основаниями так, ны, и выходные сигналы Б, и Б получто угол вмежду образующими цилин- чают одинаковое...
Устройство для дискретного перемещения объекта

Номер патента: 604813
Опубликовано: 30.04.1978
Автор: Кожевников
МПК: B66F 3/34
Метки: дискретного, объекта, перемещения
...А, а стропы 2 - в точках Б. В точке В к тору 1 присоединен источник 5 давления рабочего агента. Тор 1 выполнен из гибкого нерастяжимого материала, который в начальном положении имеет форму четырехугольника с двумя противоположными параллельными сторонами и двумя противоположными сходящимися сторонами, В свернутом состоянии заготовка имеет форму усеченного конуса, а в процессе формирования тора имеет форму, показанную на фиг, 3. По периметру б осуществляется соединение завернутых оболочек, при этом верхняя часть усеченного конуса прикрепляется к его основанию, имеющему больший диаметр. Образующиеся при этом604813 Формула изобретения Составитель Л. Демидовактор Т, Горячева Техред Л. Гладкова Корректоры: Л. Котови И, Позняковска...
Предыдущий патент: Механическая рука для транспортирования банок щелочных аккумуляторов
Следующий патент: Устройство для формирования сигнала управления промышленным роботом
Случайный патент: Свая