Самонастраивающаяся система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 2003160
Автор: Лащев
Текст
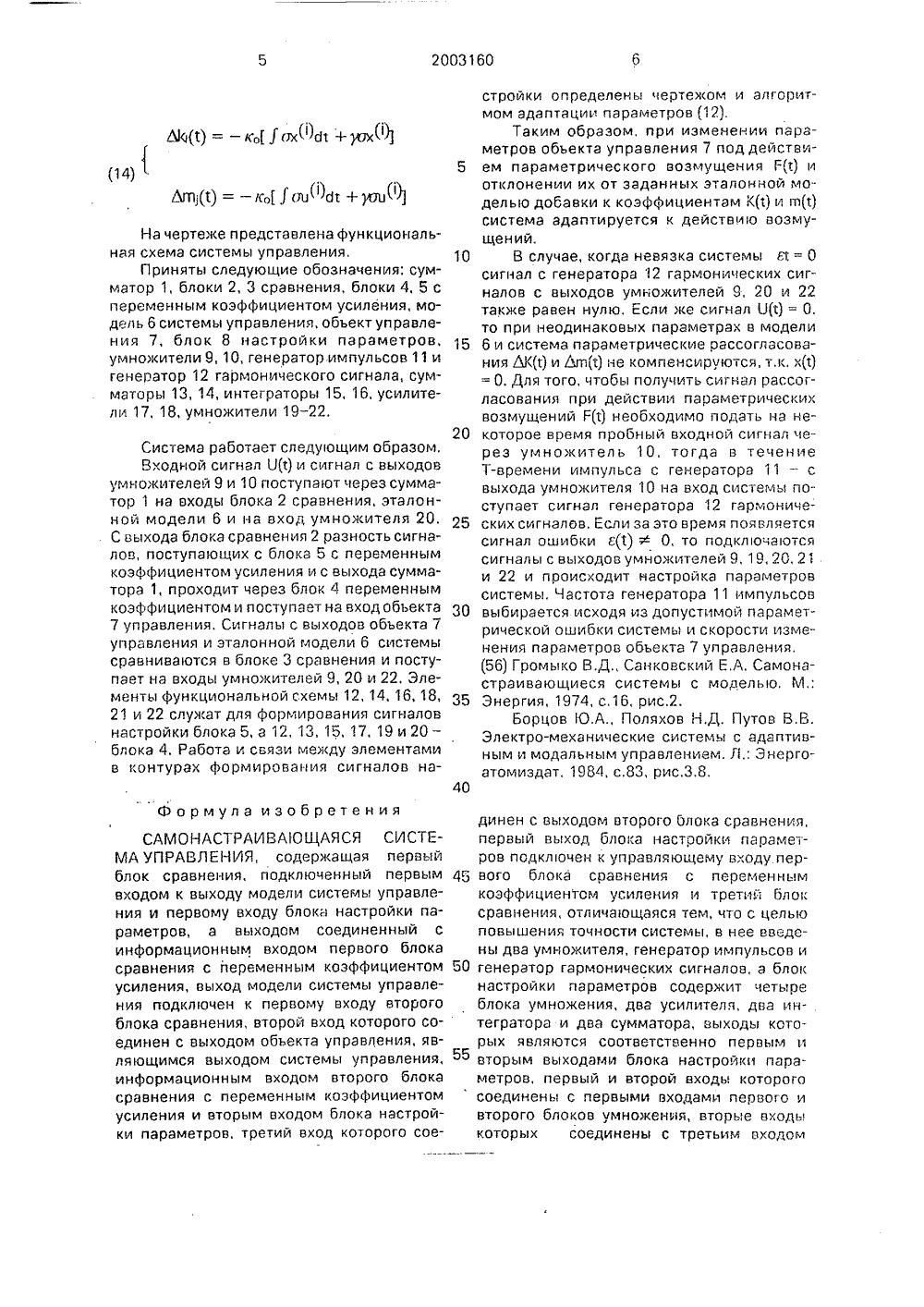
РЕТЕ К ПАТЕ те- ав- стеКомитет Российской Федерации по патентам и товарным знакам ПИСАНИЕ ИЗО(78) Лэщев Анатолий Яковлевич(67) Изобретение относится к адаптивныммам управления нестационарным объектомпения, в частности к самонастраивающимся(в) ЖУ (11) 200316 О С 1 мам управления с заданным качеством переходного процесса Цель изобретения - повышение точности системы в процессе поддержания заданного качества переходного процесса Цель достигается за счет введения в систему управления двух умножителей, генератора импульсов и генератора гармонических сигналов, а также за счет отличного от известного выполнения блока настройки параметров.1 ил.2003160 Изобретение относится к адаптивным с,:сгемам управления нестационарным обьекгам управления, в частности к самонастраивающимся системам(СНС) управления с ззанным качеством переходного процесса,4 звестна самонастраивающая система ; правления, содержащая нестационарный об акт управления, блоки сравнения, сумма.-.), матричные умнокители, дифференциа)о,;.блоки с переменным коэффициентом ус 1 ления и блок настройки,Недостатком известной системы является низкая точность ее при условии отсутс: вия "богатого" входного сигнала системы, Этот недостаток отмечается у всех СНС с зталонной моделью,Целью изобретения является повышение то )ности системы в процессе поддержания заданного качества переходного процесса,Цель достигается тем, что в известную систему дополнительно введены генератор гармонического сигнала, два блока умножения и генератор импульсов.Теорема, Пусть задан управляемый обьект, описываемый уравнением где д(1) - д+ в(с)к(т) = Ь(т)5 ( в(т)т(с)- В- т(т)(8) 25 Для того. чтобы обеспечить сходимостьпроцедур настройки как по сигнальному рассогласованиюе так и по параметрическому ЛК(т) и Ьт)(т) необходимо выполнение равенства30 х = д(т)х+ В(т)11,01 = К(т)х + в(т.)0, (1) где х(т) Я В", Аф - (пхп) матрица, б 1 п) х(1) =(пх 1), 0 п) О(1) = (вх 1), п 1и. где у(в,О 0 - некоторая положи 35 тельная гармоническая функция (например,фо, 1)=А(Я Пв 1 + СОЯв 1 + 8 П 2 в 1 + СОЯ 2 в 1 ++ з и пв 1 + СОЗП).) . Уравнение (10) будет справедливо, если обеспечить равенство 40(11)откуда немедленно получим при к = 2 ко где хм(1) определено дифференциальнымуравнением Юф) = - ко(,/х + д( )и)50 ( Ьп(1) = -к 0 аг 1 + д( )2 ро),(12) х -дх +ВО(4) Доказательство: Без потери общностидокажем теорему для и = 1. Выберем функцию Ляпунова 55(5) Тогда параметрические управления Запишем значение производной функции Ляпунова+ ЬпЛП 1 + ЛКЛК, (9)= кЫ - ЬК 2 у(в, т) - ЬГП 2)(в, ), (10) ко:х + кЬгпяО + Лтпйп + Л(/й + В общем случае функция Ляпунова будет вида к,т Ег + дт,Л + руптп)2 алгоритмы (12) в общем случае запишем ввиде(14) ( 5ьпЩ = - ьХсаб 1 +дым На чертеже представлена функциональная схема системы управления,Приняты следующие обозначения; сумматор 1, блоки 2, 3 сравнения, блоки 4, 5 с переменным коэффициентом усиления, модель 6 системы управления, объект управления 7, блок 8 настройки параметров, умножители 9, 10, генератор импульсов 11 и генератор 12 гармонического сигнала, сумматоры 13, 14, интегоаторы 15, 16, усилители 17, 18, умножители 19 - 22. 20Система работает следующим образом, Входной сигнал О и сигнал с выходов умножителей 9 и 10 поступают через сумматор 1 на входы блока 2 сравнения, эталонной модели 6 и на вход умножителя 20, С выхода блока сравнения 2 разность сигналов, поступающих с блока 5 с переменным коэффициентом усиления и с выхода сумматора 1, проходит через блок 4 переменным коэффициентом и поступает на вход объекта 30 7 управления, Сигналы с выходов объекта 7 управления и эталонной модели 6 системы сравниваются в блоке 3 сравнения и поступает на входы умножителей 9, 20 и 22, Элементы функциональной схемы 12, 14, 16, 18, 21 и 22 служат для формирования сигналов настройки блока 5, а 12, 13, 15, 17, 19 и 20 - блока 4. Работа и связи между элементами в контурах формирования сигналов на 40 Формула изобретения САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ, содержащая первый блок сравнения, подклюценный первым входом к выходу модели системы управления и первому входу блока настройки параметров, а выходом соединенный с информационным входом первого блока сравнения с переменным коэффициентом усиления, выход модели системы управления подключен к первому входу второго блока сравнения, второй вход которого соединен с выходом обьекта управления, являющимся выходом системы управления, информационным входом второго блока сравнения с переменным коэффициентом усиления и вторым входом блока настройки параметров, третий вход которого соестройки определены чертежом и алгоритмом адаптации параметров (12).Таким образом, при изменении параметров обьекта управления 7 под действием параметрического возмущения Рф и отклонении их от заданных эталонной моделью добавки к коэффициентам К(1) и гп(т) система адаптируется к действию возмущений,В случае, когда невязка системы л = О сигнал с генератора 12 гармоницеских сигналов с выходов умножителей 9, 20 и 22 также равен нулю. Если ке сигнал Ц) = О, то при неодинаковых параметрах в модели 6 и система параметрические рассогласования ЛК(г) и Ьт(т) не компенсиряатся, т,к, х(1) = О. Для того, чтобы получить сигнал рассогласования при действии параметрических возмущений Р(1) необходимо подать на некоторое время пробный входной сигнал через умножитель 10, тогда в течение Т-времени импульса с генератора 11 - с выхода умножителя 10 на вход системы по. ступает сигнал генератора 12 гармонических сигналов. Если за это время поягляется сигнал ошибки я(1)О, то подключаются сигналы с выходов умножителей 9, 19, 20, 21 и 22 и происходит настройка параметров системы, Частота генератора 11 импульсов выбирается исходя из допустимой параметрицеской ошибки системы и скорости изменения параметров объекта 7 управления. (56) Громыко В.Д., Санковский Е А. Самонастраивающиеся системы с моделью, М Энергия, 1974, с,16, рис.2.Борцов Ю.А., Поляхов Н.Д. Путав В,В, Электро-механические системы с адаптивным и модальным управлением. Л,: Энергоатомиздат, 1984, с.83, рис.3.8. динен с выходом второго блока сравнения, первый выход блока настоойки параметров подклоцен к управляющему входу.первого блока сравнения с переменным коэффициентом усиления и третий блок сравнения, отличающаяся тем, что с целью повышения точности системы, в нее введены два умножителя, генератор импульсов и генератор гармонических сигналов, а блок настройки параметров содержит четыре блока умножения, два усилителя, два интегратора и два сумматора, выходы которых являются соотвстственно первым и вторым выходами блока настройки параметров, первый и второй входы которого соединены с первыми входами первого и второго блоков умножения, вторые входы которых соединены с третьим входамТираж Подписное НПО "Поиск" Роспатента113035, Москва, ЖРаушская наб., 4/5 Заказ 3234 Производственно-издательский комбинат "Патент", г. Ужгород, ул,Гагарина, 101 блока настройки параметров, а выходычерез первый и второй интеграторы соединены с первыми входами соответственно первого и второго сумматоров, вторые входы которых через первый и второй усили тели . соединены с выходами соответственно третьего и четвертого блоков умножения, первые входы которых соединены с четвертым входом блока настройки параметров, а вторые входы соединены с выходами соответственно первого и второго блоков умножения, причем в системе управления выход первого блока сравнения с переменным козффициентом усиления соединен с входом обьекта управления, выход генератора гармонических сигналов подключен к четвертому входу блока настройки параметров и первым входам первого и второго умножителей, вторые входы которых подключены соответственно к выходу второго блока сравнения и выходу генератора импульсов, первый вход третьего блока сравнения является входом системы управления, второй и третий входы которого соединены с выходами соответственно первого и второго умножителей, а выход подключен к первому входу первого блока сравнения, второй вход которого соединен с выходом второго блока сравнения с переменным козффици- ентом усиления, подключенного управляющим входом к второму выходу блока настройки параметров,
СмотретьЗаявка
04834190, 14.06.1990
Лащев Анатолий Яковлевич
МПК / Метки
МПК: G05B 13/00
Метки: самонастраивающаяся
Опубликовано: 15.11.1993
Код ссылки
<a href="https://patents.su/4-2003160-samonastraivayushhayasya-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Самонастраивающаяся система управления</a>
Система контроля параметров интегральных схем
Номер патента: 746437
Опубликовано: 05.07.1980
Авторы: Белянин, Володарский, Самарцев, Туз
МПК: G01R 31/303, G06F 11/07
Метки: интегральных, параметров, схем
...результатам опросаформирует команды очередности, поступающие на дешифратор 3 таким образом, что первой поступает команда,соответствующая наибольшему коду,поступавшему из определенного счетчика блока 15, затем - команда, соответствующая меньшему по величинекбду и так в порядке убывания величины кодов до наименьшего (иначе УВМ1 формирует команды очередности всоответствии с величиной кодов счетчиков в блоке 15 в порядке их убывания). Если коды ряда счетчиков иливсех равны, то команды очередностиформируются в определенной последовательности, определяемой программой, заложенной в УВМ 1,УВМ 1 передает в счетчик 2 начальный адрес номера последовательности тестовых комбинацийВ то жевремя на вход дешифратора 3 и коммутатора 4 из УВМ 1 поступает...
Система оптимального управления объектом второго порядка

Номер патента: 651308
Опубликовано: 05.03.1979
Авторы: Игнатенко, Синеглазов, Торба, Шпит
МПК: G05B 13/02
Метки: второго, объектом, оптимального, порядка
...входу первой модели, пятый вход которойподключен к выходу первого сумматора,а второй выход первого триггера подключен ко входу объекта, а блок самонастройки содержит последовательносоединенные второй функциональный преобразователь и блок умножения.Блок-.схема системы представленана фиг. Х; на фиг. 2 представлен фазовыйпортрет системы.Система содержит 1, 2, 3-первый втрой, третий сумматоры, 4, 5-первую ивторую модели, 6-блок сравнения, 7 нуль-орган, 8 - блок управления первой моделью, 9, 10 - йервый ивторой триггеры, 1 1 - блок Эквивалентность, 12,13 - первый и второй функциональные преобразователи, 14 - блокумножения, 15 - интегратор, 16 -объект, 17 - блок начальных.уставок,18 - блок самонастройки, 19 - контуридентификации,Ц...
Система оптимального управления объектами второго порядка

Номер патента: 954934
Опубликовано: 30.08.1982
Авторы: Синеглазов, Чумаченко
МПК: G05B 13/02
Метки: второго, объектами, оптимального, порядка
...воздействие, обеспечивающее стабилизацию координаты Х на значенииХ = Хтдоп. При этом система реализует нелинейный закон управления, определенный двумя функциями переключения. Первая из которых управляет выводом ограниченной координаты на допустимое значение и переключает ее на стабилизацию, а после стабилизации снова управляет ограниченной координатой, вторая дает моменты начала управления ограниченной координатой. Поскольку кусочно-линейная или ку сочно-нелинейная аппроксимация функций переключения сопряжена со значительными погрешностями, то для реализации закона управления может быть использована модель многократно и в "быстром" времени реализующая уравнения движения объекта Когда параметры объекта неизвестны, то...
Система оптимального управления объектами второго порядка

Номер патента: 648946
Опубликовано: 25.02.1979
Авторы: Игнатенко, Синеглазов, Тумаркин
МПК: G05B 13/02
Метки: второго, объектами, оптимального, порядка
...блоков 2 и 3 управления моделью подвег их как начальное условие на модели объекта 21 1 юскольку состояние триггеров 13 и 14 в данном случае одинаково, го элемент эквивалентность 16 выдвег сигнал "1", в дешифратор 1 2 при входной комбинации "11" также выдаег 1", го блоки 2 и 3 управления моделью включают в режимы решения соответственно модели объекта 21 и 22.5 1 О При этом модель объекта 22 решает уравнение движения при значении управляющего воздействия "О, а модель 21 приОгп = - Ц . Это позволяет, используя модель обьекга 22 для построения траектории движения объекта 23 при нулевом значении управления, рассчитать коэффициент подобия, необходимый для "сканирования моделью объекта 21 первой линии переключения объекта. При достижении...
Система идентификации параметров многомерного нелинейного динамического объекта
Номер патента: 1385122
Опубликовано: 30.03.1988
Авторы: Иванов, Перфильев, Цуканов, Шустов
МПК: G05B 13/02
Метки: динамического, идентификации, многомерного, нелинейного, объекта, параметров
...параметров ао т- (а, а, ,а ) и выдача этого значения вектора параметров на выход блока. Это значение поступает на соответствующие параметрические входы всех моделей 1 и 2, в результате че" го во всех моделях устанавливаются начальные значения параметров а .Ц=о 1 =1,ш). Причем в каждой 1-й вспомогательной модели 2 значение параметра а устанавливается с малым приращекием Л а;, поступающим на соответствующий сумматор 15 отклонений. После выставки заданных значений параметров во всек моделях системы на первом выходе блока 12 команд появляется кратковременный управляющий сигнал 11, поступающий на стартовые входы блока 7 вычисления функционала, всех блоков 8 вычисления частных производных, блока 11 контроля сходимости и блока 5 памяти. По...
Предыдущий патент: Система управления нестационарным нелинейным объектом
Следующий патент: Адаптивная система управления нестационарным нелинейным объектом
Случайный патент: Арматурный элемент для дисперсного армирования бетона