Самонастраивающаяся система управления с эталонной моделью
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1827664
Автор: Лащев

Текст
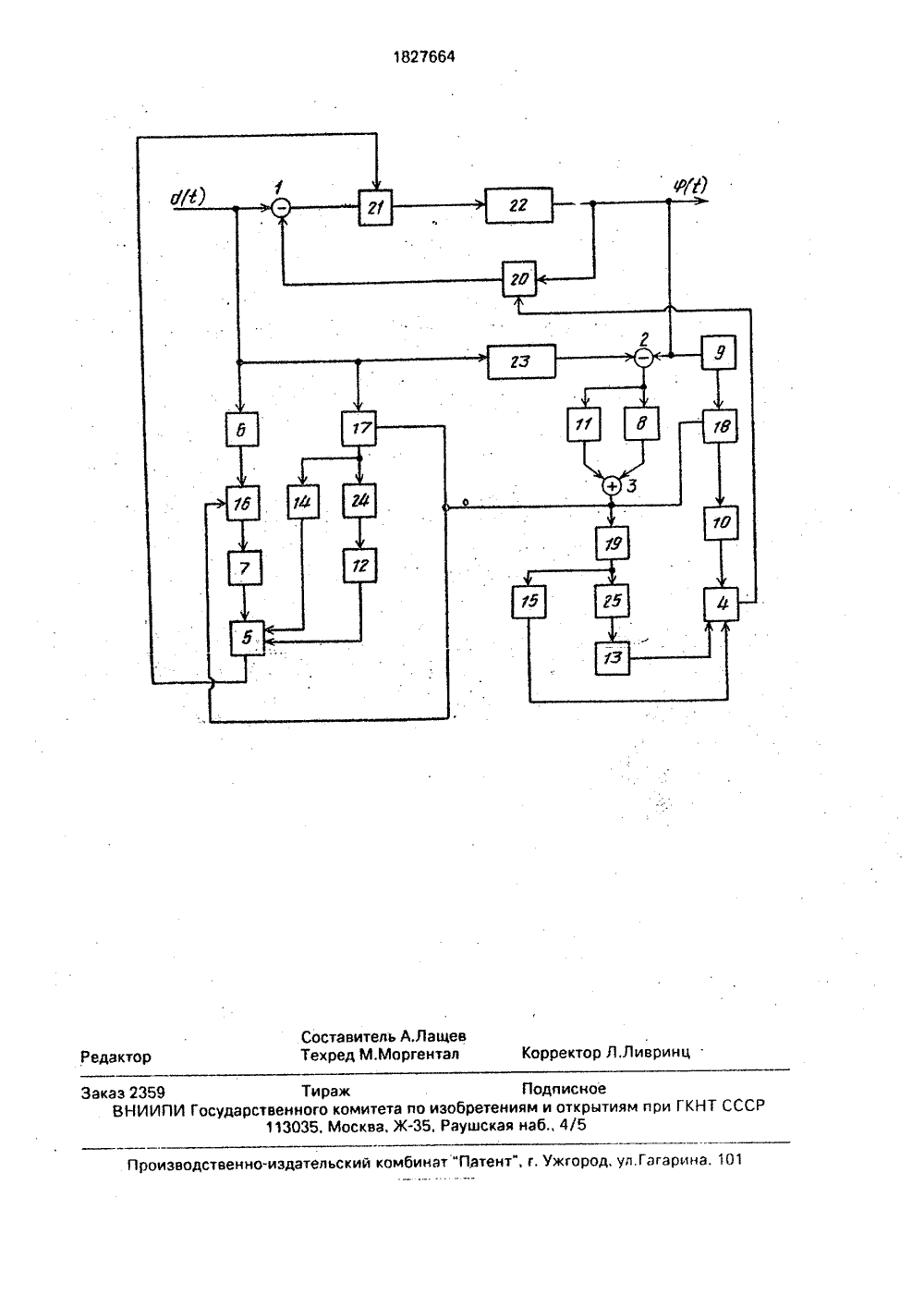
(51)5 0 05 В. 13/00 ГОСУДАРСТВЕННОЕ ПАТЕНТВЕДОМСТВО СССР(57) Изобретение относится к системам управления. Цель изобретения - повышение точности системы - достигается тем, что система дополнительно содержит два блока возведения в степень, последовательно соединенные первый дифференциатор, третий блок умножения и второй дифференциатор, четвертый блок умножения и четвертый дифференциатор и последовательно соединенные пятыйдифференциатор и третий сумматор, 1 ил,л, %26 ., Поляхов Н.ДПутав В.В.ческие системы с адаптивм управлением, Л,: Энерго, с. 107, рис. 4.3,ТРАИВАЮЩАЯСЯ СИСТЕНИЯ С ЭТАЛОННОЙ МО Гп(т) - перемемые при по- входной си1) и (2) запишния где Е(т) страиваФ) Из управл Изобретение относится к системам управления, а именно к системам управления нестационарным обьектом с эталонной моделью, синтезированной на основе второго метода Ляпунова,Цель изобретения - повышение точности системы управления нестационарным обьектом,Эта цель достигается тем, что самонастраивающаяся система управления с эталонной моделью дополнительно содержит матричный усилитель, сумматор, пять дифференциаторов, два блока возведения в степень и два умножителя.Рассмотрим нестационарный обьектуправления для простоты и первого порядка, но не теряя в общности: р =(-а(т-д(т)+ ЬЫ 9 Тогда с учетом (51 из (3) и (4) запишем внениедля ошибки Р 3 р (т)- ргде р (т) - выход- управление, аф Ь(1) - пере А управление енные коэффици редставим в виде(54) САМОНАСМА УПРАВЛЕДЕЛЪЮ бьекта управления, ц 1(Т) енные параметры, намощи блока настройки, нал.ем уравнение системы-а + Л с 3(т) = а 3(т), Ь + Л пъ 3(т) Ь 3(с) ют Обозначиме- Л с(1) у+ Л п(1)д-а я + е (7)Выберем функцию Ляпуновач = 0,5(е + ктр + Л Фтр ) (8)г где Л стр(1) и Л втр(т) - требуемые значения текущих параметрических отклонений, Лс(с) и Лв(т) соответственно, и запишем производную функцию Ляпунова гч =ее + Лстр Лстр+ Литр Лптр (9) Значение производной е найдем из Яв следующем виде Ф У Ф й е = Лстр гр+ Л стр у+Л етрд Л+ атраС учетом (10) запишем производную ч е( Ленсер ф+ Лс,тр ф + Л птф 3+ ЬВтрд) + Л стр, Л стр+ Л етр Ь й 1 тр Если теперь положить значение й в видеч 0,5 е р) "+(ед) "+ Лстр,Г Л Ьрбт+со+ Л ЙътрЛ пътрсч (12) и = 1,21 то необходимо, чтобы выполнялись равен- ства Л с Л с =- Л с ее,Л ятр Л Йтрф=- Л перед,Л Ьр 6 Ьрст = - Л стрее,соЛитр," ь атрст =- Л еред.сое дЛ ср:-(е д)гед Лглр=-(ед)" Иэ (13) немедленно получим алгоритмыпараметров Л с,р = -(е Р)о 1-(е сР)с 1 (14)со Л астр = -(ед) - - - 9 - -едст,гп 1 о е (1 От соГдее=а е+еПолож им, что Л стр(т) "-Л сн(т) и Л петр(т) = = Лен(т), а значение настраиваемых пара, метров регулятора представим в виде 10 Лс(т) - с(то) - Л сн(т),Л (т) = (то) - Л н(т)(15)Если записать значения Лсн(т) иЛ пн через их текущие значения Л сф) -.Я(т) Л с(т)Ь(т)Л вн(т) =Л, (т) Л в(с)Ь(т)(16) 20 и с учетом (15), (16) и (5) запишем при пропорциональном законе в контуре адаптации(17)8 разомкнутом контуре адаптации ошибкиЛс(т) и Л щ(т) можно записать в виде 30, -а + с (то)Ь(т) + а = Л с(т)(18)а в замкнутом из (17) получим для Л с 3(т) иЛ а 3(т)35 В случае пропорционально - дифференциально-интегрального закона в контуре.адаптации при изменении входного сигнала 45 д(т) и параметров обьекта управления а(т) иЬ(т) в последнем будут как статическая, таки динамическая ошибка, поэтому можносформулировать следующее утверждение:Рассмотренная адаптивная системе уп равления будет устойчива, если отклоненияпараметров Лс 3(т) и Л гп 3(т) будут таковы,что система с параметрами 55(20)будет удовлетворять условиям устойчивостиРаусса - Гурвица,Таким образом, алгоритмы (14) позволя 1827664- обеспечить в контуре адаптации параметров,- снять ограничения на скорость изменения йэраметров объекта управления.О сказанном свидетельствует производная функция Ляпунова (12), которая непосредственно показывает сходимость алгоритмов (14) кэк по сигнальному рассогласованию, так и по параметрическим,Синтез алгоритмов (14) проведен для случая, когда подстраиваются как нули (1), так и полюса(2, 3),Кроме того, при синтезе алгоритмов(14) не требуется решать систему уравнений для определения составляющих матрицы Р (2, 3), что существенно упрощает синтез,На чертеже представлена функциональная схема системы управления, где приняты следующие обозначения: блоки сравнения 1, 2, сумматоры 3, 4, 5, дифференциаторы 6, 7, 8, 9, 10, усилители 11, 12, 13, интеграторы 14, 15, блоки умножения 16, 17. 18, 19, блоки с переменным коэффициентам усиления 20, 21, нестационарный обьект управления 22, эталонная модель 23, блоки 24 и 25 возведения в степень,Система работает следующим образомВходной сигнал 9(1) поступаег на входблока 1 сравнения, на второй вход которого через блок 20 с переменным коэффициентом усиления поступает выходной сигнал р(т) обьекта управления. Сигнал ошибки управления с выхода блока 1 сравнения через блок 21 с переменным коэффициентом усиления в качестве управления поступает на вход объекта 22 управления.Сигнал 9(1) поступает также нэ через эталонную модель 23 системы на вычитающий вход блока 2 сравнения, где сравнивается с выходным сигналом объекта рСигнал невязки с выхода блока сравнения 2 е (т) служит для формирования сигналов настройки параметров 1 и щф Смысл установки блоков функциональной схемы 8, 9, 10, 11, 3, 4, 13, 15, 18, 19 и 25 ясен из алгоритма адаптации параметров - первое уравнение системы уравнений (14), а второе уравнение этой системы реализуют блоки 5, 6, 7, 12, 14, 16, 17, 24 и связи между ними.С выходов сумматоров на входы настройки соответственно Л внф) поступают на входы настройки соответственно блоков 20 и 21 с переменным коэффициентом усиления, Коэффициенты усиления блоков 20 и 21 настраиваются таким образом, чтобы скомпенсировать параметрические отклонения ЛМ(с) и Л гг(с), которые будут равны нулю, когда е = О.ды третьего и четвертого блоков умножения подключены к входам соответственно чет вертого и пятого дифференциаторов, выходы которых соединены с первыми входами 20 25 Формула изобретения Самонастраивающаяся система управления с эталонной моделью, содержащая эталонную модель, выход которой соединен с входом системы и первым входом первого блока умножения, выход которого соединен с входом первого интегратора, выход первого блока с переменным коэффициентом усиления подключен к первому входу первого блока сравнения, обьект управления, выход которого является выходом системы, второй блок сравнения, подключенный первым входом к выходу эталонной модели, второй блок умножения, подключенный выходом к входу второго интегратора, два усилителя и второй блок с переменным коэффициентом усиления, отл и ча ю ща я с я тем, что, в нее введены пять дифференциаторов, три сумматора, два блока возведения в степень, третий и четвертый блоки умножения и третий усилитель, вход системы соединен с входом первого дифференциатора и вторым входом первого блока сравнения, подклюценного выходом через второй блок с переменным коэффициентом усиления к входу объекта управления, выход которого соединен с первым входом второго блока умножения, информационным входом первого блока с переменным коэффициентом усиления, входом второго дифференциаторэ и вторым входом второго блока сравнения, выход которого через третий усилитель и третий дифференциэтор подключен соответственна к первому и второму входам первого сумматора, выходы первого и второго диффаренциаторов подключены к первым входам соответственно третьего и четвертого блоков умножения, вторые входы которых подключены к выходу первого сумматора и втооым входам первого и второго блоков умножения, подключенных выходами через первый и второй блоки возведения в степень к входам соответственно первого и второго усилителей, выхосоответственно второго и третьего суммэторов, подключенных выходами к управляющим входам соответственно второго и первого блоков с переменным коэффициентом усиления, второй и третий входы второго сумматора подключены к выходам первого усилителя и первого интегратора соответственно, второй и третий входы третьего сумматора подключены к выходам второго усилителя и второго интегратора соответственно,1827664 Составитель А,Лащев Техред М,Моргентал Реда кто рректор Л.Ливри роизводственно-издательский комбинат Патент", г, Ужго Гагарина. 10 Заказ 2359 Тираж Подписное ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ 113035. Москва. Ж, Раушская наб 4/5
СмотретьЗаявка
4834188, 14.06.1990
А. Я. Лащев
ЛАЩЕВ АНАТОЛИЙ ЯКОВЛЕВИЧ
МПК / Метки
МПК: G05B 13/00
Метки: моделью, самонастраивающаяся, эталонной
Опубликовано: 15.07.1993
Код ссылки
<a href="https://patents.su/4-1827664-samonastraivayushhayasya-sistema-upravleniya-s-ehtalonnojj-modelyu.html" target="_blank" rel="follow" title="База патентов СССР">Самонастраивающаяся система управления с эталонной моделью</a>
Система оптимального управления объектами второго порядка

Номер патента: 954934
Опубликовано: 30.08.1982
Авторы: Синеглазов, Чумаченко
МПК: G05B 13/02
Метки: второго, объектами, оптимального, порядка
...воздействие, обеспечивающее стабилизацию координаты Х на значенииХ = Хтдоп. При этом система реализует нелинейный закон управления, определенный двумя функциями переключения. Первая из которых управляет выводом ограниченной координаты на допустимое значение и переключает ее на стабилизацию, а после стабилизации снова управляет ограниченной координатой, вторая дает моменты начала управления ограниченной координатой. Поскольку кусочно-линейная или ку сочно-нелинейная аппроксимация функций переключения сопряжена со значительными погрешностями, то для реализации закона управления может быть использована модель многократно и в "быстром" времени реализующая уравнения движения объекта Когда параметры объекта неизвестны, то...
Система оптимального управления объектами второго порядка

Номер патента: 648946
Опубликовано: 25.02.1979
Авторы: Игнатенко, Синеглазов, Тумаркин
МПК: G05B 13/02
Метки: второго, объектами, оптимального, порядка
...блоков 2 и 3 управления моделью подвег их как начальное условие на модели объекта 21 1 юскольку состояние триггеров 13 и 14 в данном случае одинаково, го элемент эквивалентность 16 выдвег сигнал "1", в дешифратор 1 2 при входной комбинации "11" также выдаег 1", го блоки 2 и 3 управления моделью включают в режимы решения соответственно модели объекта 21 и 22.5 1 О При этом модель объекта 22 решает уравнение движения при значении управляющего воздействия "О, а модель 21 приОгп = - Ц . Это позволяет, используя модель обьекга 22 для построения траектории движения объекта 23 при нулевом значении управления, рассчитать коэффициент подобия, необходимый для "сканирования моделью объекта 21 первой линии переключения объекта. При достижении...
Система оптимального управления объектами второго порядка

Номер патента: 920634
Опубликовано: 15.04.1982
Автор: Синеглазов
МПК: G05B 13/04
Метки: второго, объектами, оптимального, порядка
...ООтттст или Отттт О Отттсигде 0 ст,- максимальное значение управляющего воздействия. При этом управляющее устройство, синтезирующееоптимальное управление в Функциифазовых переменных и чистого временного запаздывания в координатах должно реализовать нелинейный закон уп5 920634равления, определяемый на фазовойплоскости уравнениями двух линий переключения. При этом для исключениянеобходимости использования блокапостоянного или регулируемого запаздывания, носящего дополнительнуюпогрешность в решении, целесообразно воспроизводить линии переключения в преобразованных координатахсоответственно для первой кривой 0ХХу ХХ и ХХ, ХХ для второй.При этом обе линии переключения впреобразованных координатах оказываются подобны друг другу,...
Система управления объектом с несколькими управляющими входами

Номер патента: 1287105
Опубликовано: 30.01.1987
Авторы: Авдеев, Киселев, Мышляев, Попов, Соловьев
МПК: G05B 13/04
Метки: входами, несколькими, объектом, управляющими
...с выхода первого источника 15 постоянного сигнала. Полученный сигнал о величине И(С) контролируемого возмущения с выхода первого элемента 16 сравнения подается на первый вход блока 18 умножения, где умножается на коэффициент К (С), сигнал о котором поступает на второй вход этого блока умножения с выхода блока 17 адаптации. В результате на выходе блока 18 умножения формируется сигнал о величине ьц (С) изменения интегрального значения общего управляющего воздействия, необходимого для компенсации тт(С)дЦ (С) : К (с)ьт(с)., (6) выходов соответственно четвертого 40и первого 16 элементов сравнения, поформуле 11 дц В.-К,ОУ,ф1 У 1 дВ 7 -Я у+ 1 т(е-.) 40 45 50 55 7 1 3-й порции материала в объекте управления,Сигнал у(С) об усредненном...
Следящая система

Номер патента: 788076
Опубликовано: 15.12.1980
Автор: Куличенко
МПК: G05B 11/01
Метки: следящая
...угол 91 систеьи,выходной угол 90 системз, сигнал 8рассогласования, выходной сигналО тахогенератора, сигнал Оос обратной связи на втором входе сумматора 2.Измеритель 1 рассогласования выявляет и преобразует в напряжение раэность между входным 6 и выходным 8углами систеьы, которое поступает через сумматор 2 и усилитель 3 на исполнительный двигатель 4, вал которогочерез редуктор 5 связан со вторымвходом измерителя 1 рассогласования.С валом двигателя 4 механически так- щже связан тахогенератор б, выходнойсигнал Ор которого в элементе 7сравнения сравнивается с сигналомрассогласования 9 системз с выходаизмерителя 1 рассогласования. Сигналс выхода элемента 7 сравнения черезпервый блок 8 сигнатуры поступаетна второй вход блока 9 умножения,на...
Предыдущий патент: Устройство для цифрового измерения отношения двух временных интервалов
Следующий патент: Регулятор уровня верхнего бьефа
Случайный патент: Жидкостный реостат