Имитатор динамических воздействий для испытаний транспортного средства
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки




Текст
)5 О ГОСУДАРСТВ ПО ИЗОБРЕТ ПРИ ГКНТ СС ННЫЙ КОМИТЕТ ЯМ И ОТКРЫТИ Яъ.1 ГръИСАНИЕ ИЗОБРЕТЕН У СВИДЕТЕЛЬСТВУ К АВТО роизвоостроеДени ССР 87, СКИХ ВОЗИЙ ТРАНСпортно- исполь- таниях(71) Одесский филиал Научновенного обьединения по тракто(56) Авторское свидетельство СМ 1437723, кл, 6 01 М 17/00, 19(54) ИМИТАТОР ДИНАМИЧЕДЕЙСТВИЙ ДЛЯ ИСПЫТАНПОРТНОГО СРЕДСТВА(57) Изобретение относится к трму машиностроению и может бзовано при ресурсных и колесных транспортных средств, преимущественно тракторов, Цель иэобретения - повышение точности испытаний за счет приближения условий испытаний к эксплуатационным воспроизведениям эксплуатационных режимов нагружения. Имитатор динамических воздействий содержит инерционные грузы 1, эксцентрично прикрепленные к колесу 5 посредством кронштейна 3, прикрепленного к полуоси 4, Положение инерционных грузов 1 относительно оси вращения колеса 5 может регулироваться винтовым механизмом. При вращении колеса 5 инерционные грузы 1 также вращаются, нагружая полуось 4 знакопеременными горизонтальными и вертикальными нагрузками. 1 з,п. ф-лы, 4 ил.Изобретение относится к транспортному машиностроению и может быть использовано при ресурсных испытаниях колесных транспортных средств, преимущественно тракторов.Цель изобретения - повышение точности испытаний за счет приближения условий испытаний к эксплуатационным воспроизведениям эксплуатационных режимов нагружения.На фиг,1 изображен предлагаемый имитатор; на фиг,2 - то же, вид сбоку; на фиг.З - схема основных сил, действующих на трактор; на фиг,4 - графики зависимостей силовых внешних воздейсгвий, характеризующих нагруженности оси ведущего колеса трактора силой инерции при изменении позиции инерционногс груза на колесе.Имитатор динамических воздействий содержит возбудитель динамических нагрузок, образованный инерционными грузами 1, прикрепленными болтовыми соединениями 2 к соединительному,кронштейну 3, установленному эксцентрично на полуоси 4 колеса 5 посредством болтов б и гаек 7, которые одновременно обеспечивают крепление диска 8 к фланцу полуоси 4 колеса 5, Болты соединений 2 размещены в радиальных пазах 9, выполненных в соединительном кронштейне 3, Имитатор динамических воздействий содержит регулировочный механизм, выполненный в виде винта 10, взаимодействующего с гайками 11. Винт 10 установлен в подшипнике, смонтированном в соединительном кронштейне 3, и в пяте 12, выполненной заодно с соединительным кронштейном 3. Гайки 11, взаимодействующие с винтом 10, жестко соединены с инерционными грузами 1. Винт 10 имеет хвостовик 13 для установки сменной рукоятки 14.Для контроля положения инерционных грузов 1 относительно оси вращения колеса 5 введено измерительное устройство, содержащее стрелочный указатель 15, связанный с инерционными грузами 1, и мерную шкалу 16, размещенную на соединительном кронштеине 3,Для обеспечения необходимого уровня динамических воздействий освобождают бол;овые соединения 2 и с помощью рукоятки 14 винт 10 приводят во вращение. При этом инерционные грузы 1 перемещаются в радиальном направлении и затяжкой болтовых соединений 2 ф буксируются в требуемом положении, контролируемом по срелочному указателю 15 и мерной шкале 16,П ри движении испытуемого тра ктора инерционные грузы 1 вращаются с колесами 5, причем на полуось 4 колеса 5, а затем45 25 ЗО так и горизонтальных воздействий, что повышает точность испытаний.Формула изобретения1. Имитатор динамических воздействийдля испытаний транспортного средства, со 5 10 15 20 25 ЗО 35 40 через полуось 4 - на испытуемый трактор постоянно действует центробежная сила Р инерции. Направление вектора центробежной силы инерции Ри и значение ее составляющих, отнесенных к вертикальной и горизонтальной геометрическим осям колеса, зависят от позиции инерционных грузов 1 (фиг,З),Инерционные грузы 1, находясь в верхней точке А колеса 5, создают инерционное воздействие, вектор которого совпадает с вертикальной осью и направлен противоположно воздействию части массы трактора, передаваемой через колесо 5, В этом случае уменьшаются вертикальная опорная реакция и нагрузка на полуось 4 колеса 5. В нижней точке С колеса 5 вектор инерционного воздействия совпадает по направлению с направлением действия массы, приходящейся на колесо 5, при этом величина опорной реакции.и, соответственно, нагрузка на полуось 4 возрастают. В точке В вектор силы инерции противоположен по направлению усилию Ркч сопротивления качению трактора и усилию Р,р на крюке, что уменьшает воздействие на трактор силы Р сопротивления и тем самым вызывает снижение уровня крутящего момента Мк, причем снижается нагрузка элементов в трансмиссии и двигателя трактора. В точке Д вектор силы инерции, совпадая по направлению с силой сопротивления Ркач качению и усилием Ркр на крюке, создает дополнительное сопротивление движению трактора, что приводит к повышению значения крутящего момента и, соответственно, к увеличению нагрузки в элементах трансмиссии и двигателя. В промежуточных точках Е, расположенных между геометрическими осями колеса 5, вертикальные Ри горизонтальные Р, составляющие силы инерции воздействуют на полуось 4 как в вертикальном, так и в горизонтальном направлениях, причем соотношения между значениями составляющих сил инерции зависят от фазы расположения инерционных грузов 1,Значения вертикальной опорной реакции Р и крутящего момента М на ведущем колесе при установившейся скорости движения трактора изменяют по синусоидальному закону (фиг,4),Таким образом, предлагаемый имитатор динамических воздействий обеспечивает имитацию колебаний как вертикальных,1689785 15 держащий возбудитель динамических нагрузок в виде груза, соединительный кронштейн для установки груза на колесо и регулировочный механизм, отл и ча ю щ ийс я тем, что, с целью повышения точности испытаний за счет приближения условий испытаний к эксплуатационным воспроизведениям эксплуатационных режимов нагружения, возбудитель динамических нагрузок образован прикрепленными к установленному эксцентрично на оси колеса транспортного средства соединительному кронштейну инерционными грузами с возможностью регулироаззия их поло;кем; г относительно колеса, при этом регулировочный механизм выполнен в виде винта, установленного в соединительном кронштейне 5 и связанного с инерционными грузами. 2. Имитатор по п.1, о т л и ч а ю щ и й с ятем, что дополнительно введено измерительное устройство, выполненное в виде 10 мерной шкалы, прикрепленной к соединительному кронштейну, и стрелочного указателя, присоединенного к возбудителю динамических нагрузок.Л, Волк( Корректор О,аз 3806 Тираж ВНИИПИ Государственного комитет 1130 Э 5, Москва, одписн зводственно-издательский ком Патент, г,Состави ехред М зобретен Раушская ткрытия
СмотретьЗаявка
4719850, 17.07.1989
ОДЕССКИЙ ФИЛИАЛ НАУЧНО-ПРОИЗВОДСТВЕННОГО ОБЪЕДИНЕНИЯ ПО ТРАКТОРОСТРОЕНИЮ
ПРИХОДЬКО ЛЕВ САВЕЛЬЕВИЧ, ДЕНИСОВ ГЕОРГИЙ ВАСИЛЬЕВИЧ, КАМШИЛОВ ЮРИЙ ЗИНОВЬЕВИЧ
МПК / Метки
МПК: G01M 17/007
Метки: воздействий, динамических, имитатор, испытаний, средства, транспортного
Опубликовано: 07.11.1991
Код ссылки
<a href="https://patents.su/4-1689785-imitator-dinamicheskikh-vozdejjstvijj-dlya-ispytanijj-transportnogo-sredstva.html" target="_blank" rel="follow" title="База патентов СССР">Имитатор динамических воздействий для испытаний транспортного средства</a>
Установка для испытаний на воздействие звукового давления

Номер патента: 1377640
Опубликовано: 28.02.1988
Автор: Лебедев
Метки: воздействие, давления, звукового, испытаний
...их по расходугаза - с всасывающим патрубком компрессора 5, Акустический КПД стендапри этом повышается за счет использования при генерации звуковых колебаний полного давления нагнетания, создаваемого компрессором 5, и согласования по расходу газа источников,соединенных с нагнетательным и всасывающим патрубками компрессора,В динамике при регулировании статического давления в камере 1 группы 502 и 3 источников звука работают какв стационарном режиме, а источникирегулирующей группы 4 работают следующим образом, Например, для создания повышенного давления в камере 1 55необходимая часть источников звукарегулирующей группы, подключенных квсасывающему патрубку, с помощью управляющих вентилей системы 6 регулирования отключается от него...
Способ испытания упрочняющего воздействия торкретирования на трещиноватые горные породы

Номер патента: 1599539
Опубликовано: 15.10.1990
Авторы: Айтбаев, Мектешев, Чабдарова, Шамганова
МПК: E21C 39/00
Метки: воздействия, горные, испытания, породы, торкретирования, трещиноватые, упрочняющего
...на фиг. 3 - образец с полученной трещиноватостью; на фиг. 4 - схема испытания образца без торкретного покрытия; на фиг. 5 - образец после нанесения набрызгбетона; на фиг. 6 - схема испытания образца с бетонным покрытим.Способ осуществляется следующим образом,От предварительно отобранной массивной пробы с помощью камнерезной машины с алмазным диском отделяют параллельно одной из граней плиту (фиг. 1)Шероховатая- повышение точности го изготавливают одинаределяют их на группы и искусственную трещинопараметрами. Затем изы взаимно фиксируют по того осуществляют торрупп, кроме одной, с разтонного слоя и опред ия бетоном трещин в агружают до разр степени их упрочн очности образцов, о ботанных бетоном.сех образцов, а та разцов,...
Стенд для определения динамических нагрузок на автомобиль от дорожных неровностей и сил взаимодействия между колесами автомобиля и дорогой

Номер патента: 116953
Опубликовано: 01.01.1958
Автор: Цимбалин
МПК: G01M 17/007
Метки: автомобиль, автомобиля, взаимодействия, динамических, дорогой, дорожных, колесами, между, нагрузок, неровностей, сил, стенд
...посредством стальных стержней 2, жестко закрепленных на полках 3 боковых стенок платформы, подвешены ровные площадки 4 и эталонные неровности 5. На стеркиях 2 расположены электрические датчики омического типа б и 7, Подвешенные площадки 4 могут быть разделены короткими жесткими опорами 8.При движении автомобилядеформации растяжения и изги1 б 953на которых расположены датчики, имеют только упругие деформации малой величины и их упругость практически не влияет на динамические нагрузки.Процесс переезда ровных площадок и неровностей сопровождается показаниями датчиков, расположенных на переднем и заднем динамо- метрических стержнях, и результирующие силы воздействий определяются суммированием одновременно зарегистрированных нагрузок....
Имитатор моментов инерции
Номер патента: 1059461
Опубликовано: 07.12.1983
МПК: G01M 1/10
Метки: имитатор, инерции, моментов
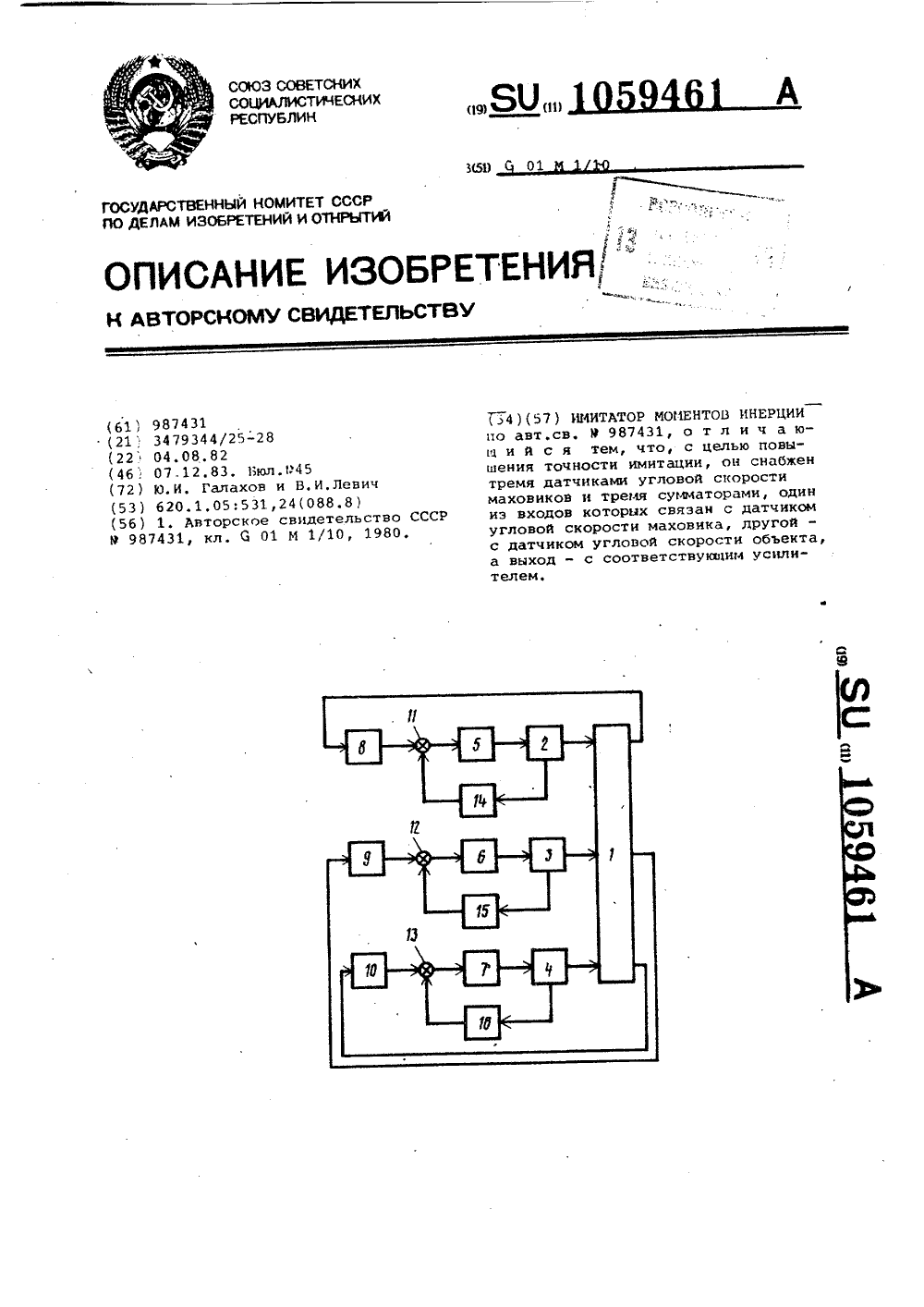
...связываеьаюх с объектом по осям координат и соединенных входами через усилители с выходами датчиков углового движения объекта, снабжен тремя датчиками угловой скорости маховиков и тремя сумматорами, один иэ входов которых З 5 связан с датчиком угловой скорости маховика, другой - с датчиком угловой скоростиобъекта, а выходс соответствующим усилителем.40 на чертеже изображена структур"ная схема предлагаемого имитаторамоментов инерции. Устройство содержит механизм 45 углового движения объекта 1, выполненный в виде трех маховиков 2-4 с приводами, свяэанных с объектом по осям координат, усилителей 5-7, выход которых связан,с входами маховиков 2-4, датчиков 8-10 угловой скорости объекта 1, входы которых ф связаны с объектом 1, сумматоров...
Нагрузочное устройство с имитатором момента инерции

Номер патента: 1597640
Опубликовано: 07.10.1990
Авторы: Исмагилов, Султангалеев, Хайновский, Хайруллин
МПК: G01M 1/10
Метки: имитатором, инерции, момента, нагрузочное
...решив систему (1) с учетом (3),получаюто = 1(1 - е ), (4)Тгде Т ----К Кцяпостоянная вре 1 +с 7мени разгона дви 1гателя при реализации закона(3), с.Из (4) следует, что изменение величины М в соответствии с законом (3) обеспечивает уменьшение или увеличение электромеханической по-. стоянной времени Т в (1вв ) разКВ.цясчто эквивалентно уменьшению или увеличению момента инерцич 1 вКВляи может регулироваться изменениемвеличины коэффициента К в регулируемом усилителе б в сторону уменьшения. Чтобы величина П+К(ю -ис) ++ М 3 не приняла отрицательного значения, необходимо ограничить максимальнсе значение величины К: 15 К (макс "сТаким образам, коэффициент Крегулируется от К О, при этом 1,.с 1 Г-К(Од. - ссс) + Мсз 1, тогда моментинерции на валу...
Предыдущий патент: Стенд для испытания ведущих мостов транспортных средств “киарз 65
Следующий патент: Стенд для проверки геометрии ходовой части транспортных средств
Случайный патент: Способ электроэрозионного изготовления пуансонов методом обратного копирования