Стенд для испытания роботов
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
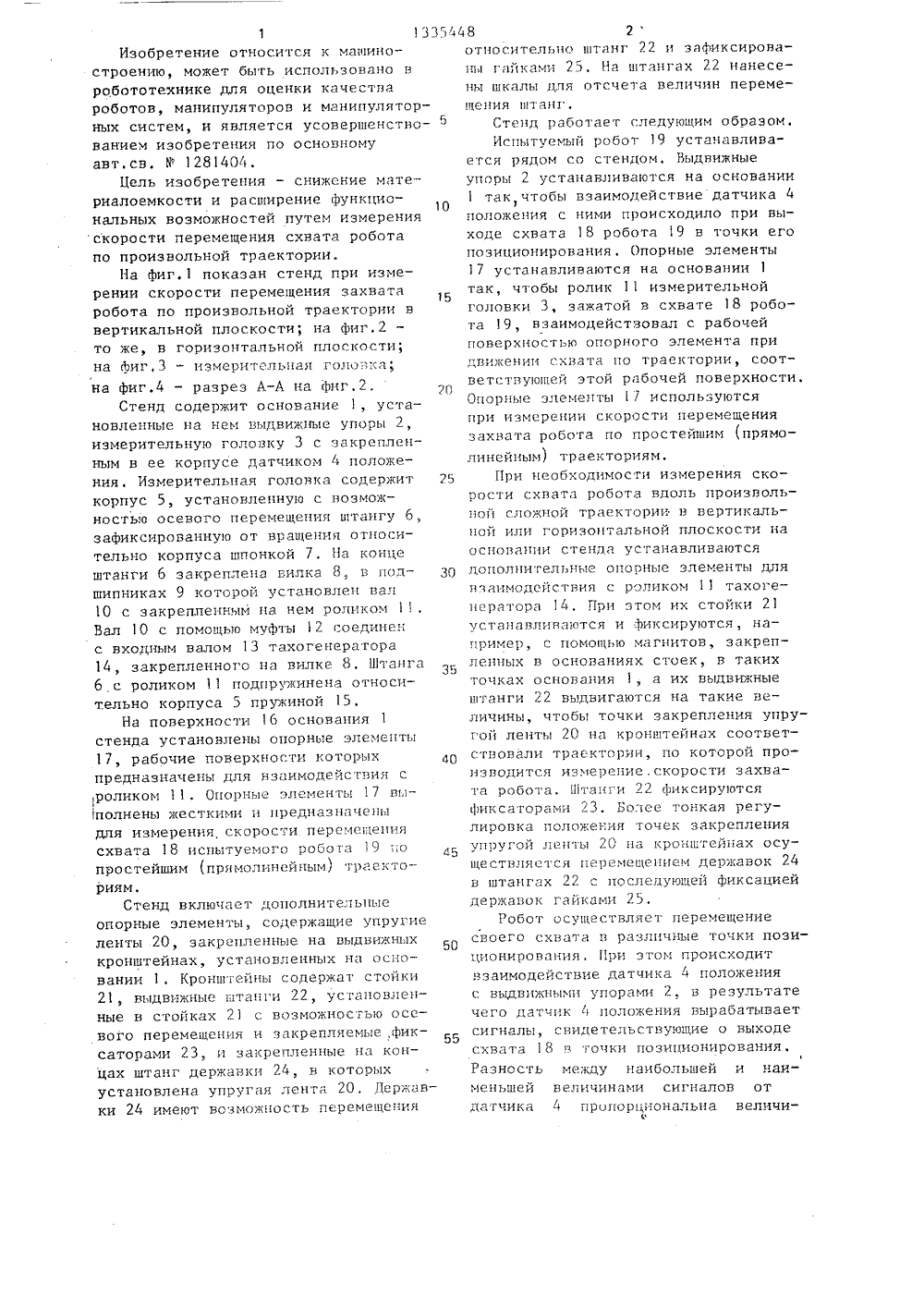
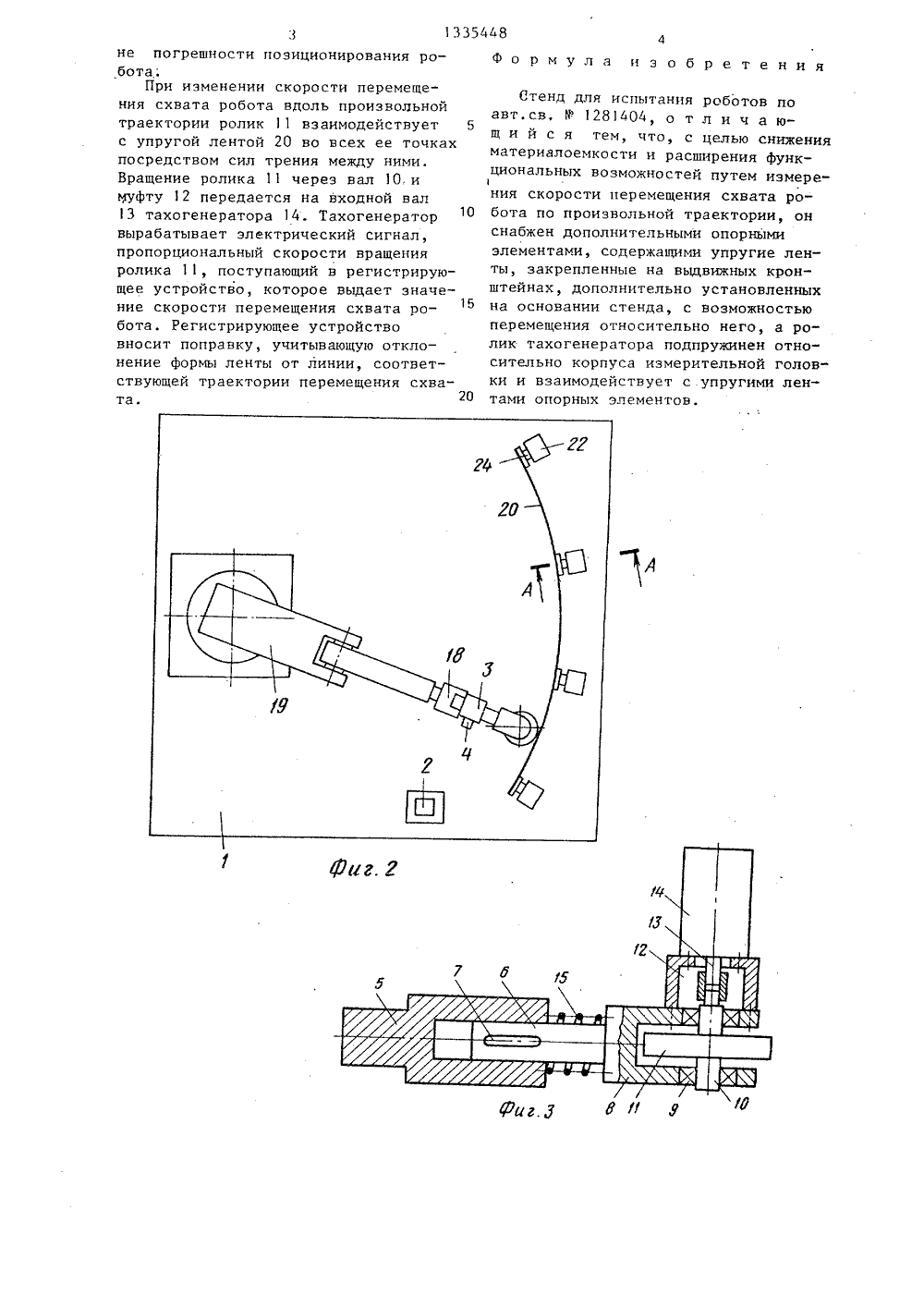
СОЮЗ СОВЕТСНИХСОЦИАЛИСТИЧЕСНИХРЕСПУБЛИК оп 4 В 25,3 11/00 ОПИСАНИЕ ИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛВСТВУ ГОСУДАРСТВЕННЫЙ НОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТНРЫТИЙ(71) Всесоюзный проектно-конструк" торский институт технологии электротехнического производства (72) М,Х.Седлер и В.С.Мартынов (53) 62.229.72 (088,8)(56) Авторское свидетельство СССР У 1281404, кл. В 25,1 11/00, 1985. (54) СТЕНД ДПЯ ИСПЫТАНИЯ РОБОТОВ (57) Изобретение относится к машиностроению и может быть использовано в робототехнике для оценки качества роботов-манипуляторов. Целью изобретения является снижение материалоемкости и расширение функциональных возможностей путем измерения скорости перемещения схвата робота по произвольной траектории. Робот 19, установленный на основании 1 стенда, осу.801335448 А 2 ществляет вертикальное или горизонтальное перемещение схвата 18 с закрепленным в нем датчиком 4 положения и измерительной головкой 3 вдольупругой ленты 20, установленной навыдвижных державках 24. Неоднократновзаимодействуя с выдвижными упорами2, датчик 4 положения вырабатываетсигналы, свидетельствующие о выходесхвата 18 в точки позиционирования,Разность между наибольшей и наименьшей величинами сигналов с датчика 4положения пропорциональна погрешности позиционирования. Перемещениесхвата 18 с измерительной головкой3, имеющей подпружиненный ролик,вдоль упругой ленты 20 заданной державками 24 формы, обеспечивает снятие сигнала, пропорционального ско-рости перемещения с тахогенератора,установленного соосно ролику измерительной головки 3. 4 ил.1 13Изобретение относится к машиностроению, может быть использовано вробототехнике для оценки качествароботов, манипуляторов и манипуляторных систем, и является усовершенствованием изобретения по основномуавт.св, 110 1281404.Цель изобретения - сиикение материалоемкости и расширение Функциональных возможностей путем измеренияскорости перемещения схвата роботапо произвольной траектории.На Фиг.1 показан стенд при измерении скорости перемещения захватаробота по произвольной траектории ввертикальной плоскости; на Фиг.2то же, в горизонтальной плоскости;на Фиг,3 - измерительная головка;на фиг,4 - разрез А-А на Фиг,2,Стенд содержит основание 1, установленные на нем выдвижные упоры 2,измерительную головку 3 с закрепленным в ее корпусе датчиком 4 положения. Измерительная головка содержиткорпус 5, установленную с возможностью осевого перемещения штангу 6,зафиксированную от ьращеция относительно корпуса шпоцкой 7. На концештанги 6 закреплена вилка Я и подшипниках 9 которой установлен вал10 с закрепленным ца цем роликом 11,Вал 10 с помощью муфты 12 соединенс входным валом 13 тахогецератора14, закрепленного ца вилке 8, Штанга6 с роликом 11 подпружинена относительно корпуса 5 пружиной 15.На поверхности 6 основания 1стенда установлены опорные элементы17, рабочие поверхности которыхпредназначены для взаимодействия с,роликом 11. Опорные элементы 17 выполнены жесткими и предназначеныдля измерения, скорос"и перемещениясхвата 18 испытуемого робота 19 попростейшим (прямолинейным) траекториям,Стенд включает дополнительныеопорные элементы, содержащие упругиеленты 20, закрепленные на выдвижныхкронштейнах, установленных на основании 1. Кронштейны содержат стойки21, вьдвижные штанги 22, установленные в стойках 21 с возможностью осевого перемещения и закрепляемые,фиксаторами 23, и закрепленные ца концах штанг державки 24, в которыхустановлена упругая лента 20. Лержавки 24 имеют возможность перемещения 35448 2отцосительцо штанг 22 и зафиксировап гайками 25. На штангах 22 цанесецы шкалы для отсчета величин перемещения штацг.Стенд работает следующим образом.Испытуемый робот 19 устанавливается рядом со стендом, Выдвижныеупоры 2 устанавливаются на основании1 так,чтобы взаимодействие датчика 4положения с ними происходило при выходе схвата 18 робота 19 в точки егопозиционирования. Опорные элементы17 устанавливаются на основаниитак, чтобы ролик 11 измерительнойголовки 3, зажатой в схвате 18 робота 19, взаимодействовал с рабочейповерхностью опорного элемента придвижении схвата по траектории, соответствуюшей этой рабочей поверхности,Опорные элементы 17 используютсяпри измерении скорости перемещениязахвата робота по простейшим (прямолинейцым) траекториям.При необходимости измерения скорости схвата робота вдоль произвольной сложной траектории в вертикальной или горизонтальной плоскости цаосновании стенда устанавливаются30 пополцительцые опорные элементы длявзаимодействия с роликом 11 тахогецсратора 14, При этом их стойки 21устанавливаются и фиксируются, например, с помощью магнитов, закрепленных в основаниях стоек, в такихточках основания 1, а их выдвижныештанги 22 выдвигаются на такие величины, чтобы точки закрепления упругой ленты 20 на кронштейнах соответствовали траектории, по которой производится измерение,скорости захвата робота. Штанги 22 ФиксируютсяФиксаторами 23, Более тонкая регулировка положения точек закрепленияупругой ленты 20 ца кронштейнах осуществляется перемещением державок 24в штангах 22 с последующей фиксациейдержавок гайками 25.Робот осуществляет перемещениесвоего схвата в различные точки позиционирования, Гри этом происходитвзаимодействие датчика 4 положенияс выдвижными упорамц 2, в результатечего датчик 4 положения вырабатываетсигналы, свидетельствующие о выходесхвата 18 в точки позиционирования.1Разность между наибольшей и наименьшей величинами сигналов отдатчика 4 пропорциональна величи 1335448не погрешности позиционирования робота;При изменении скорости перемещения схвата робота вдоль произвольной траектории ролик 11 взаимодействует 5 с упругой лентой 20 во всех ее точках посредством сил трения между ними.Вращение ролика 11 через вал 10,и муфту 12 передается на входной вал10 13 тахогенератора 14. Тахогенератор вырабатывает электрический сигнал, пропорциональный скорости вращения ролика 11, поступающий в регистрирующее устройство, которое выдает значе 15 ние скорости перемещения схвата робота. Регистрирующее устройствовносит поправку, учитывающую отклонение формы ленты от линии, соответствующей траектории перемещения схва 20 та. Формула изобретения Стенд для испытания роботов по авт.св, Ф 1281404, о т л и ч а ющ и й с я тем, что, с целью снижения материалоемкости и расширения функциональных возможностей путем измерения скорости перемещения схвата робота по произвольной траектории, он снабжен дополнительными опорными элементами, содержащими упругие ленты, закрепленные на выдвижных кронштейнах, дополнительно установленных на основании стенда, с возможностью перемещения относительно него, а ролик тахогенератора подпружинен относительно корпуса измерительной головки и взаимодействует с.упругими лентами опорных элементов.1335448 оставитель А.увароехред Л, Олийнык орректор Л Пилипен едактор В.Петраш Заказ 4010/1 Тираж 951Государственного комитета СС елам изобретений и открытий сква, Ж, Раушскаянаб.,дписное Н 3035
СмотретьЗаявка
4062812, 29.04.1986
ВСЕСОЮЗНЫЙ ПРОЕКТНО-КОНСТРУКТОРСКИЙ ИНСТИТУТ ТЕХНОЛОГИИ ЭЛЕКТРОТЕХНИЧЕСКОГО ПРОИЗВОДСТВА
СЕДЛЕР МИХАИЛ ХАИМОВИЧ, МАРТЫНОВ ВИКТОР СЕРГЕЕВИЧ
МПК / Метки
МПК: B25J 11/00
Метки: испытания, роботов, стенд
Опубликовано: 07.09.1987
Код ссылки
<a href="https://patents.su/4-1335448-stend-dlya-ispytaniya-robotov.html" target="_blank" rel="follow" title="База патентов СССР">Стенд для испытания роботов</a>
Устройство для стопорения подвижного элемента в произвольном положении

Номер патента: 1110605
Опубликовано: 30.08.1984
Авторы: Боронин, Рябой, Самоцветов, Цыганков
МПК: B23Q 17/02
Метки: подвижного, положении, произвольном, стопорения, элемента
...13, угол которо ранец углу сдмоторможеция цдры материалов фиксатора 6 и клипа 12, например сталь-сталь12 - -15).Клцц2 по;цружицец на Выдвижение( помццью стержня 16. который одним концом ж(стко закреплен цд траврсс 15, а цд Рруом конце счдбкец захватом 17, дцри,Ср, в вилс широкой Олг)вки. Пружина 14 О:.11(рстся концами Б клин 2 и траверсу 15.45;1 грдБсрсе 10 жестко здкрслеы кОнцыс гы)с х Воз 3)дтцы х .т( )(цсй 16, Г трэБс;сд 15 есо установлена цд конце хо.лового Бинта 18 приво) д иерем:щения фик- С)1 ОРОВ.5 ОПривод перемещения икса)оров ВыцОЛщц в иде ходового винта 8 Вместе с закрсцлецций цд цем травсрсой 15, устаювлсццых Б корпусе 5 с возможностью осевого цеС)1 сЦспи 51 с цомОшьО поворонои гдЙкив корпусе с помо)цью ралиальцо-упорных...
Прибор для регистрации скорости движения рабочих элементов ударных испытательных установок (стендов и копров)

Номер патента: 111315
Опубликовано: 01.01.1957
Автор: Бураго
МПК: G01P 3/36
Метки: движения, испытательных, копров, прибор, рабочих, регистрации, скорости, стендов, ударных, установок, элементов
...фотоэлемент 8. Сигналы от фотоэг)емента через лили)сль 9 переда)отся на осциллограф 10. Рас-,ровая рсстка , укреплен Лд 111315ная на платформе 2, в процессе ее перемещения занимает ряд после.довательных положений: от А до й (фиг. 2). В момент, когда указанная решетка окажется в таком положении (положение А), что ее просветы закрыты непрозрачными полосами второй растровой решетки 2, свет па фотоэлемент не поступает, а шлейф осциллографа соответственно не отклоняется. По записи на осциллограмме, изображенной в нижней части фиг. 2, такому положению соответствует точка Аь Когда решетка 5, переместившись на величину О, м,я, равную ширине штрихов, окажется в положении С, просветы на обеих решетках совпадут, и на фотоэлемент поступит...
Устройсство для управления скоростью и положением станка

Номер патента: 515474
Опубликовано: 25.05.1976
МПК: G05B 19/16, G05B 19/416
Метки: положением, скоростью, станка, устройсство
...скоростью двигателя10, который регулирует текущий сигналположения,Для получения высоких скоростей обработки необходимо иметь высокий сигналпогрешности Я, но это может привести кнеточностям в обработке. Для устранения этого имеется еше один цифро-аналоговый преобразователь бв который поступает цифро. 30вая информация из регистра скорости 12 икоторый вырабатывает моделирующий сигнал,пропорциональный запрограммированной скорости обработки. Сигнал Е из преобразователя 6 складывается сумматором 8 с сиг 35налом погрешности Е и подается к двигателю 10. Таким образом можно достигнутьвысоких скоростей перемещения при большейточности обработки, а также производитьработу с небольшим сигналом погрешности 40Я , во всяком случае меньшим,...
Способ адаптации робота-переносчика к форме и положению плоских предметов

Номер патента: 440248
Опубликовано: 25.08.1974
Авторы: Ерош, Игнатьев, Михайлов, Прохоров, Шецен
МПК: B25J 9/00
Метки: адаптации, плоских, положению, предметов, робота-переносчика, форме
...в виде нормально разомкнутых контактов, происходит замыкание контактов под действием тяжести предметов. Таким образом, способ адаптации сводится к определению координат точек соприкосновения предмета с рабочей поверхностью (осуществляется, например, путем опроса всех датчиков чувствительного поля в определенной последовательности с помощью электронного коммутатора); определению угла наклона выбранной линии, например, оси симметрии предмета к горизонтальной оси чувствительного поля (выполняется с помощью решающего устройства, использующего сведения, получаемые в результате предыдущей операции); преобразованию полученных параметров положения ориентации предмета в электрические сигналы (например, в аналоговые напряжения); к выводу схвата...
Устройство для тонкой регулировки положения элемента

Номер патента: 529935
Опубликовано: 30.09.1976
МПК: B24B 5/34
Метки: положения, регулировки, тонкой, элемента
...поперечныля отверстиями, об 1 о,раэуЮсщИЛДП уПруГО-ПОдатЛИВЫЕ СТЕНКИ 5 Собращенными внутрь корпуса выступами б,На корпусе 4 посредством колец 7,8 смонтирована гайка 9 с буртом 10 и здимбой11; высота бурта 10 меньше высоты коль 15 па 7, С гайкой взаимодействует винт 12,несущий симметричный клин 13. В корпусесмонтирован регулируемый упор 14. В ва-рианте на фиг, 3 одна из стенок 15 корапуса 4 выполнена жесткой, а клин 1620 асимметричвым; сторона клина, обращенная.к стенке 15, параллельна оси винта 12.Устройство работает следующим образом,12- Вращал лимб 11 и связатиую с нпм гайку 9, сообщают винту 12 движение вдопь25оси корпуса 4, Кдин 13, взаимодействуяс выступами 6, деформирует стенки 5 кор-,пуса, Деформация стенки 5 через упор...
Предыдущий патент: Модуль промышленного робота
Следующий патент: Очувствленный схват робота
Случайный патент: Полоз токоприемника электроподвижного состава