Способ адаптации робота-переносчика к форме и положению плоских предметов
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
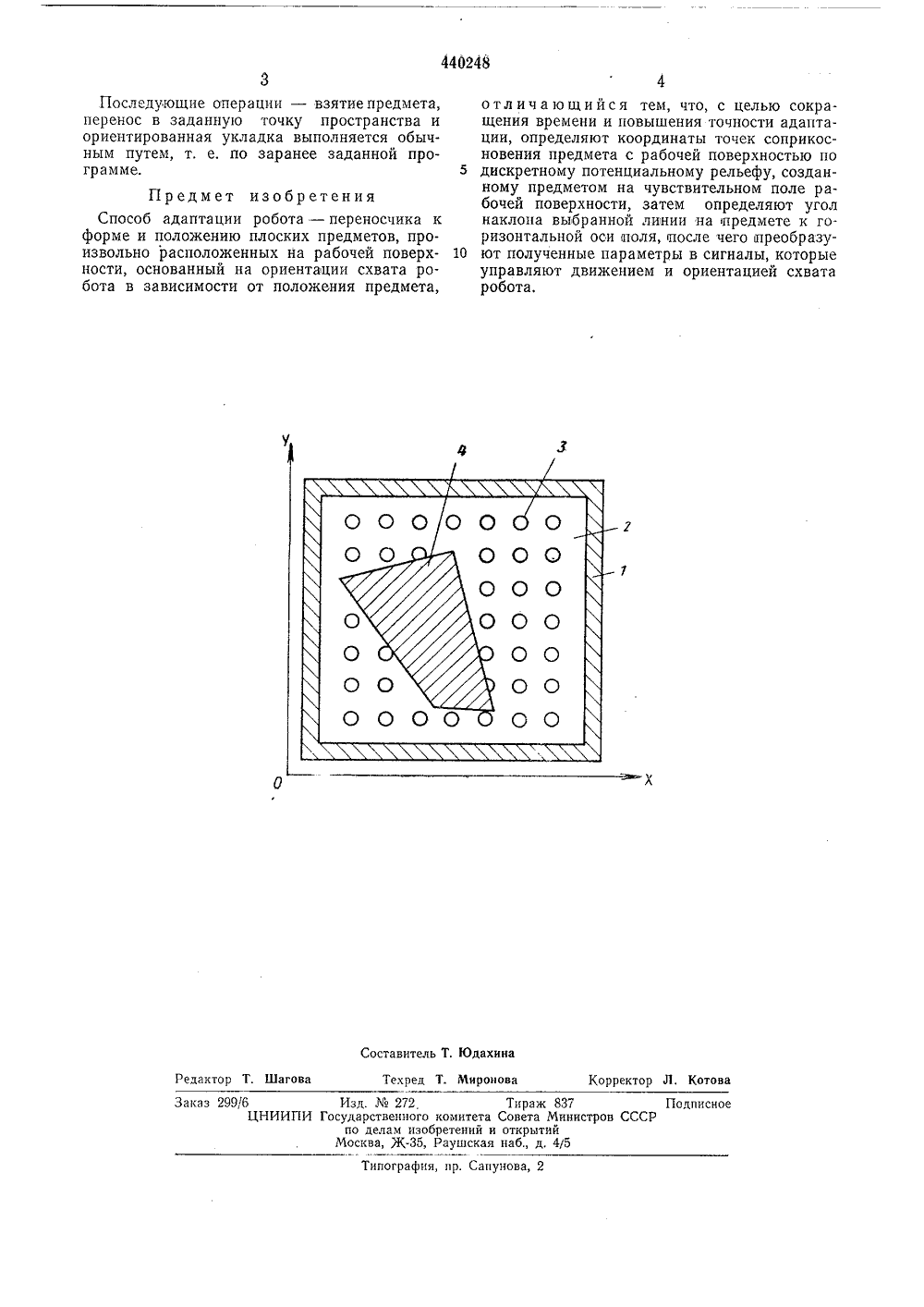
Союз Советских Социалистицеских Республик(32) ПриоритетОпубликовано 25.08,74. Б Государственныи комите Совета Министров ССС Оа делам изобретений и открытийлетень3 ата опубликования описания 20.02.7) Заявитель нинградский институт авиационного приборостроен 4) СПОСОБ АДАПТАЦИ И РОБОТА - П ЕРЕНО СЧ И ФОРМЕ И ПОЛОЖЕНИЮ ПЛОСКИХ ПРЕДМЕТО 2 предлагаеже. На черения: рабополе 2, датна чувствиПредмет 4, оле 2 рабодатчики 3, под ним, В Изобретение относится к манипуляторам,применяемым в станкостроении и других отраслях промышленности.Известны способы адаптации робота - переносчика к форме и положению предметов,основанные на ориентации схвата робота взависимости от положения предмета. Однакопроизводительность и точность способовнизка,Для сокращения времени и повышения точности адаптации определяют координаты точек соприкосновения предмета с рабочей поверхностью по дискретному потенциальномурельефу, созданному плоским предметом начувствительном поле рабочей поверхности, затем определяют угол наклона выбранной линии на предмете к горизонтальной оси поля,после чего преобразуют полученные параметры в сигналы, которые управляют движениеми ориентацией схвата робота. 2 Один из вариантов реализации мого способа представлен на черте теже приняты следующие обознач чая поверхность 1, чувствительное чики 3 и предмет 4, находящийся тельном поле рабочей поверхности, находящийся на чувствительном п чей поверхности 1, воздействует на расположенные непосредственно случае датчиков, выполненных в виде нормально разомкнутых контактов, происходит замыкание контактов под действием тяжести предметов. Таким образом, способ адаптации сводится к определению координат точек соприкосновения предмета с рабочей поверхностью (осуществляется, например, путем опроса всех датчиков чувствительного поля в определенной последовательности с помощью электронного коммутатора); определению угла наклона выбранной линии, например, оси симметрии предмета к горизонтальной оси чувствительного поля (выполняется с помощью решающего устройства, использующего сведения, получаемые в результате предыдущей операции); преобразованию полученных параметров положения ориентации предмета в электрические сигналы (например, в аналоговые напряжения); к выводу схвата робота над центром предмета и ориентации схвата в соответствии с углом наклона предмета к горизонтальной оси чувствительного поля (осуществляется путем воздействия на соответствующие звенья кинематической цепи робота электрическими сигналами, полученными в результате предыдущей операции). Перечисленные операции обеспечивают адаптацию робота - переносчика к форме и положению предмета на рабочей поверхности.440248 оставитель Т. Юдахин Кото Мирово Те аго ррек да Подписноеистров СССР Изд.272 ПИ Государственного комитета по делам изобретений и Москва, Ж, Раушскаяказ 299/6ЦН Тираж 83овета Миноткрытий аб д, 4/5 Типография, пр. Сапунова,Последующие операции - взятие предмета, перенос в заданную точку пространства и ориентированная укладка выполняется обычным путем, т. е. по заранее заданной программе. Предмет изобретенияСпособ адаптации робота - переносчика к форме и положению плоских предметов, произвольно расположенных на рабочей поверхности, основанный на ориентации схвата робота в зависимости от положения предмета,отличающийся тем, что, с целью сокращения времени и повышения точности адаптации, определяют координаты точек соприкосновения предмета с рабочей поверхностью по 5 дискретному потенциальному рельефу, созданному предметом на чувствительном поле рабочей поверхности, затем определяют угол наклона выбранной линии на предмете к горизонтальной оси аоля, после чего преобразу ют полученные параметры в сигналы, которыеуправляют движением и ориентацией схвата робота,
СмотретьЗаявка
1851531, 22.11.1972
ЛЕНИНГРАДСКИЙ ИНСТИТУТ АВИАЦИОННОГО ПРИБОРОСТРОЕНИЯ
ИГНАТЬЕВ МИХАИЛ БОРИСОВИЧ, ЕРОШ ИГОРЬ ЛЬВОВИЧ, ШЕЦЕН ЮРИЙ ГЕОРГИЕВИЧ, ПРОХОРОВ ВЛАДИМИР МИХАЙЛОВИЧ, МИХАЙЛОВ АЛЕКСАНДР АЛЕКСАНДРОВИЧ
МПК / Метки
МПК: B25J 9/00
Метки: адаптации, плоских, положению, предметов, робота-переносчика, форме
Опубликовано: 25.08.1974
Код ссылки
<a href="https://patents.su/2-440248-sposob-adaptacii-robota-perenoschika-k-forme-i-polozheniyu-ploskikh-predmetov.html" target="_blank" rel="follow" title="База патентов СССР">Способ адаптации робота-переносчика к форме и положению плоских предметов</a>
Подпятник с сегментными опорными колодками, рабочие поверхности которых устанавливаются наклонно к поверхности, передающей на колодки давление, воспринимаемое подпятником

Номер патента: 5167
Опубликовано: 30.04.1928
Автор: Бем
МПК: F16C 17/08
Метки: воспринимаемое, давление, колодками, колодки, которых, наклонно, опорными, передающей, поверхности, подпятник, подпятником, рабочие, сегментными, устанавливаются
...опорных полочек И, При нагрузке подпятника, сегменты В прогнутся, как это изображено на фиг. 1 а, и выступы Ы примут по отношеню к кольцу давления А наклонное положение, изображенное на чертеже в несколько преувеличенном виде.Так как степень наклона сегментных опорных колодок зависит с одной стороны от величины расстояния х, а с другой - также и от степени упругости кольцевого отрезка В, то оказывается возможным, путем придания соответствующих размеров и формы пружинящей части И, равно как и путем соответствующего выбора величины расстояния х, достичь наиболее выгодной величины наклона выступов Ь для основного среднего числа оборотов и нагрузки каждого подпятника.Каждая опорная колодка может быть снабжена только на одном своем конце...
Методическая печь для нагрева металлических предметов, имеющая рабочее пространство в форме незамкнутого кольца

Номер патента: 5585
Опубликовано: 30.06.1928
Автор: Булин
МПК: F27B 13/06
Метки: имеющая, кольца, металлических, методическая, нагрева, незамкнутого, печь, предметов, пространство, рабочее, форме
...П и скреплена вертикальными стойками, которые поперек сечения печи скреплены между собой сверху и снизу связями,В облицовке печи должны быть вырезаны необходимые отверстия, для наблюдения за нагревом. Посадка и выдача нагреваемых предметов производится в отверстия стенок А, которые закрываются подемными крышками. Подвижной под печи имеет форму замкнутого кольца, опирающегося на кольцевые шариковые опоры Х и зубчатую рейку Ц для передвижения. Внизу печи находится зубчатый привод Ч, который соединен посредством передач с двигателем, как указано на чертеже. Под подом печи по всей окружности проходит трюм Ш, перекрытый балками, на которых покоятся нижние подшипники шарового движения, Печь имеет беспрерывный под, который, двигаясь...
Устройство для контроля положения рабочей поверхности инструмента на станке с числовым программным управлением

Номер патента: 1242342
Опубликовано: 07.07.1986
Авторы: Никитин, Федоринчик, Якимахо
МПК: B24B 49/00
Метки: инструмента, поверхности, положения, программным, рабочей, станке, управлением, числовым
...плоскости или образующей обрабатываемой поверхности заготовки, с возможностью контактирования измерительного стержня 3 с обрабатываемой поверхностью заготовки 8 при выходе ее из зоны обработки.Измерительный стержень 3 Расположен в отверстии держателя 4 с посадкой, например, переходной, обеспечивающей фрикционное соединение изме"рительного стержня 3 с держателем 4,неподвижное при вспомогательных перемещениях держателя 4 с инструментом5 и подвижное под действием на контактную поверхность измерительногостержня 3 поверхности заготовки 8при обработке.1 О Устройство работает следующим образом,В исходном положении инструмент5 отведен в позицию загрузки заготовки 8. Преобразователь 7 датчика 215 вырабатывает сигнал,...
Устройство для проверки отсутствия посторонних предметов в рабочей зоне оборудования

Номер патента: 1402406
Опубликовано: 15.06.1988
Авторы: Кирпичников, Краснов
МПК: B30B 15/28
Метки: зоне, оборудования, отсутствия, посторонних, предметов, проверки, рабочей
...11 ован 11 я в контро 1 руе 11 ОЙ, ф( зоне 5 преса, образованной матрицей 6.и пуансоном 7.Устройство работает следующим об 1 азомПосле автоматического сьема огпрес сОВзнных дРтзлей и удалениях их из зонь 1 прессования рука манипулятора 11 вадит шаблон в рабочую зову с Фиксацией 1(бнечного ПОЛОжения руки ;)атем рука поднимает шаблон на Фиксирован О иое 1.асстояние и приближает еГО при агом с заданным заэовом к пансону Егпи в процРСО"- движе 1 НЯ О началь" НО:.О ПО "ОЖ(1 ЮЛЯ ДО КОН ЕЧ БОГО УСИЛИЕ Ба дан 1 ке установленном на руке р( Окажется Выше допустимого 1,шаблон уперся в посторонний предмет), движение руки 66 рекращается р пресс Откл 10 ;аечся и вызыыается об лу.ив-опп 6 Й,пер со 11 ал 5 СЕ сли ДВ 1(е 16 ие к пуаисону пр Ошло без...
Способ получения рабочей поверхности гипсовых форм

Номер патента: 1669720
Опубликовано: 15.08.1991
Авторы: Козырнов, Кондратьева, Либуркин, Цуриков
МПК: B28B 1/26
Метки: гипсовых, поверхности, рабочей, форм
...диссоциированного аммиака, Послеизготовления рабочей основы ее пропитывают в течение 2-3 мин путем налива в неесуспенэии, состоящей из 90 мас. воды и10 мас.% гипсового вяжущего из фосфогипса, оставшуюся суспензию выливают из основы в специальную емкость. Затемсобирают рабочий кап, где кожухом являет ся предварительно пропитанная металлическая основа,Готовят суспензию пластической консистенции, состоящую из 25 мас. воды и 75мас.",ь гипсового вяжущего иэ гипса илифосфогипса, и заливают эту суспензию вкап, Через 40 мин кап разбирают и формувыдерживают в течение трех дней для прохождения процесса гидратации полуводного гипса и удаления избыточногоколичества воды,В подготовленную таким образом форму заливают 25-ный водный раствор гип...
Предыдущий патент: Устройство для маркировки
Следующий патент: Захват
Случайный патент: Камнеуборочная машина