Модуль резонансного манипулятора
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки

Текст
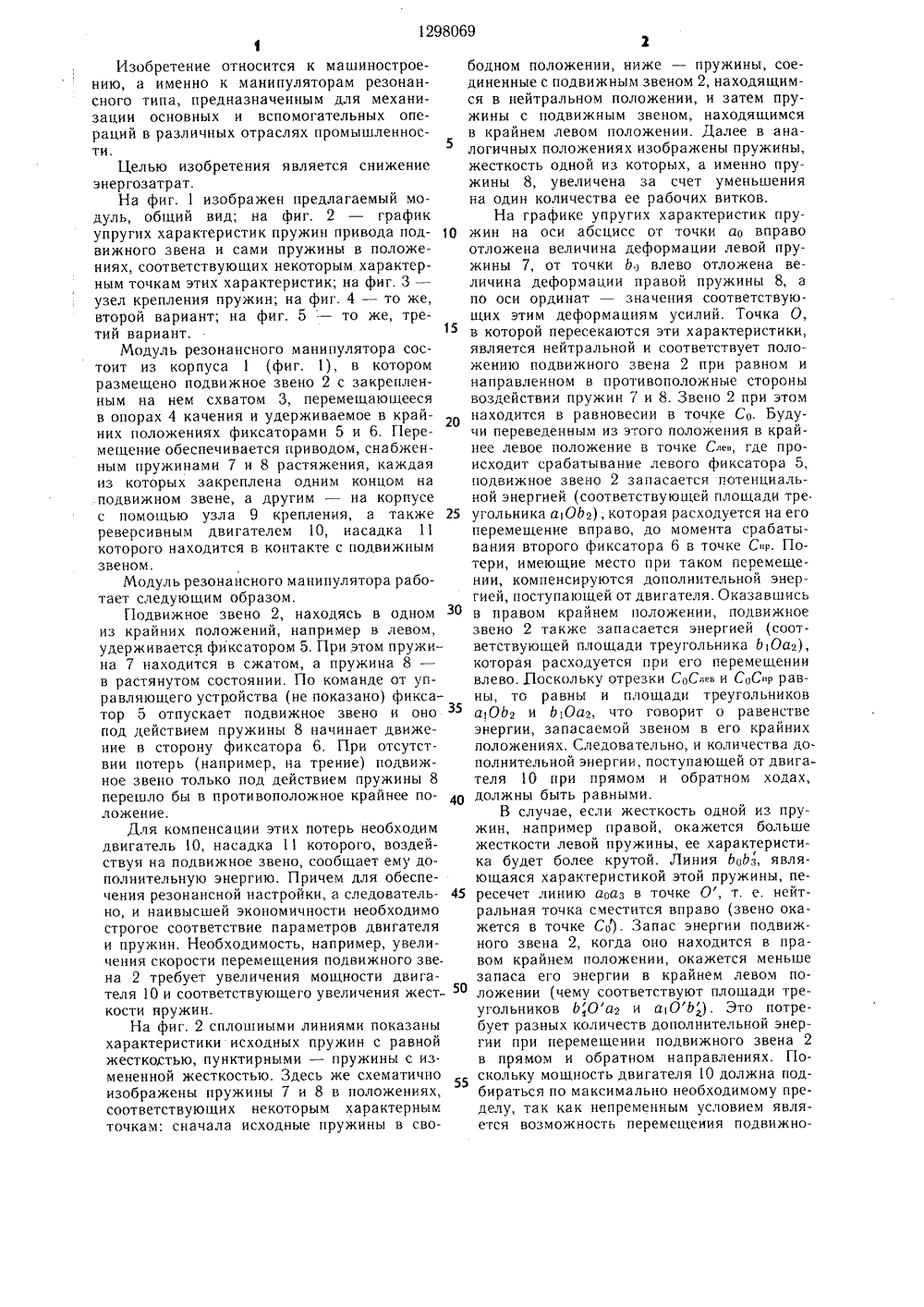
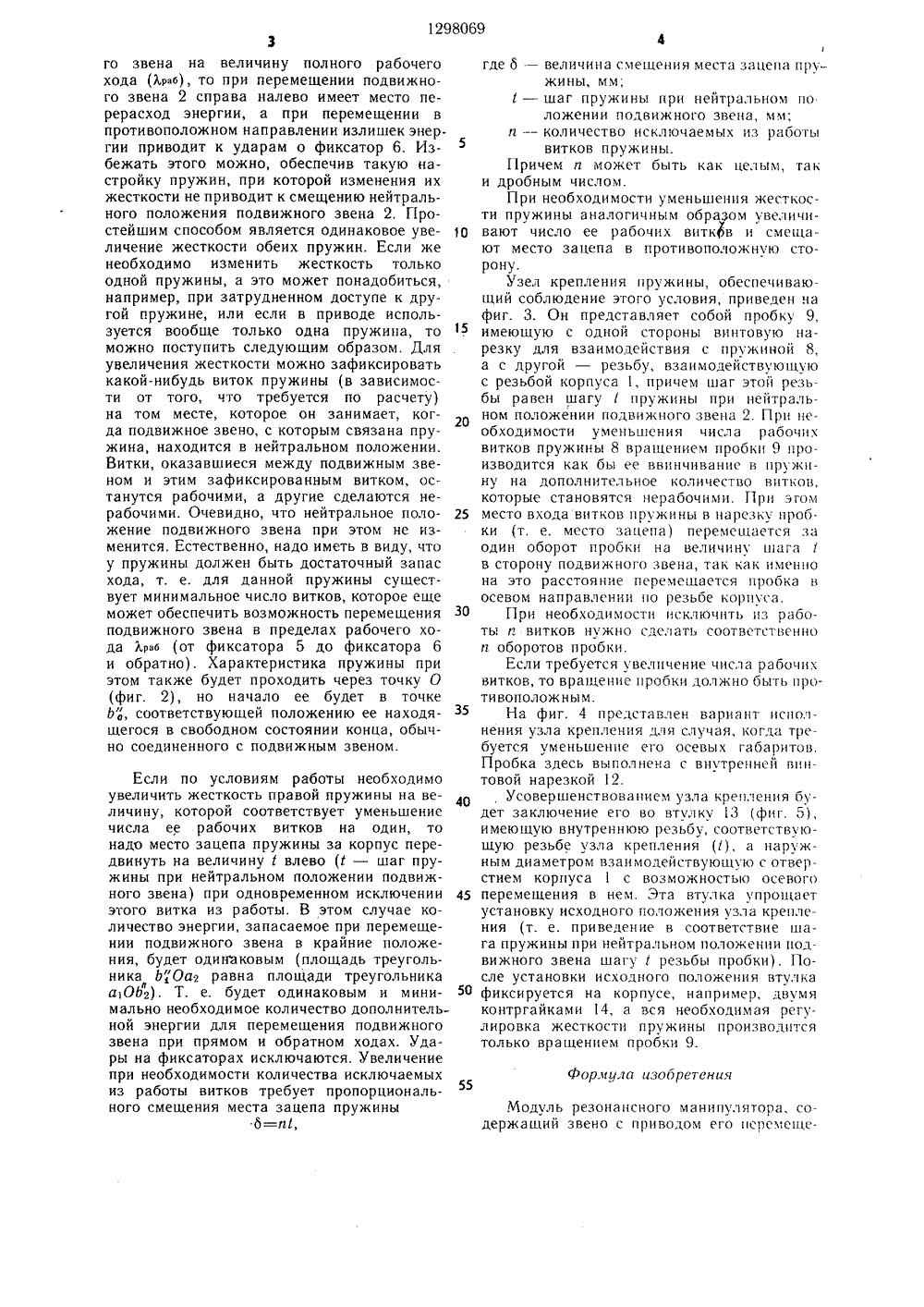
(19) (11 806 5 1 9/00 ОПИСАНИЕ ИЗОБРЕТЕНИЯ Ф ОСУДАРСТВЕННЫЙ КОМИТЕТ СССРПО ДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИ ВТОРСКОМУ СВИДЕТЕЛЬСТВУ(54) МОДУЛЬ РЕЗОНАНСНОГО МАНИПУЛЯТОРА (57) Изобретение относится к машиностроению, а именно к манипуляторам резонансного типа, предназначенным для механизации основных и вспомогательных операцийв различных отраслях промышленности. Целью изобретения является снижение энергозатрат за счет обеспечения возможностирегулирования жесткости упругих элементовдля согласования их характеристик с характеристиками двигателя. Звено 2, находясь в одном из крайних положений, например в левом, удерживается фиксатором 5. При этом пружина 7 находится в сжатом, а пружина 8 в растянутом состоянии. По команде от управляющего устройства фиксатор 5 отпускает подвижное звено и онддействием пружины 8 и двигателя 12 нает движение в сторону фиксатора 6 и т. д. Двигатель служит для компенсации потерь, например, на трение. Мощность двигателя и жесткость пружин для заданной скорости перемещения должны находиться в строгом соответствии для получения резонансного режима, при котором потребляемая энергия минимальна, Жесткость пружины, например 8, подстраивается вращением пробки 9, ввинченной в корпус 1 или втулку 10. На пробке 9 выполнена винтовая нарезка, в канавке которой расположены витки пружины 8. За счет того, что шаги резьбы равны шагу пружины 8 при нейтральном положении звена 2, изменения ее жесткости происходят без изменения нейтрального положения звена 2. 5 ил.Изобретение относится к машиностроению, а именно к манипуляторам резонансного типа, предназначенным для механизации основных и вспомогательных операций в различных отраслях промышленности.Целью изобретения является снижение энергозатрат.На фиг. 1 изображен предлагаемый модуль, общий вид; на фиг, 2 - график упругих характеристик пружин привода под 510 вижного звена и сами пружины в положениях, соответствующих некоторым характерным точкам этих характеристик; на фиг. 3 - узел крепления пружин; на фиг. 4 - то же, второй вариант; на фиг. 5 - то же, третий вариант.15Модуль резонансного манипулятора состоит из корпуса 1 (фиг. 1), в котором размещено подвижное звено 2 с закрепленным на нем схватом 3, перемещающееся в опорах 4 качения и удерживаемое в крайних положениях фиксаторами 5 и 6. Г 1 еремещение обеспечивается приводом, снабженным пружинами 7 и 8 растяжения, каждая из которых закреплена одним концом на подвижном звене, а другим - на корпусе с помощью узла 9 крепления, а также 25 реверсивным двигателем 10, насадка 11 которого находится в контакте с подвижным звеном.Модуль резонансного манипулятора работает следующим образом.Подвижное звено 2, находясь в одном из крайних положений, например в левом, удерживается фиксатором 5, При этом пружина 7 находится в сжатом, а пружина 8 - в растянутом состоянии. По команде от управляющего устройства (не показано) фиксатор 5 отпускает подвижное звено и оно под действием пружины 8 начинает движение в сторону фиксатора 6, При отсутствии потерь (например, на трение) подвижное звено только под действием пружины 8 перешло бы в противоположное крайнее по О ложение.Для компенсации этих потерь необходим двигатель 10, насадка 11 которого, воздействуя на подвижное звено, сообщает ему дополнительную энергию. Причем для обеспечения резонансной настройки, а следователь но, и наивысшей экономичности необходимо строгое соответствие параметров двигателя и пружин. Необходимость, например, увеличения скорости перемещения подвижного зве. на 2 требует увеличения мощности двигателя 10 и соответствующего увеличения жест кости пружин.На фиг. 2 сплошными линиями показаны характеристики исходных пружин с равной жесткостью, пунктирными - пружины с измененной жесткостью. Здесь же схематично изображены пружины 7 и 8 в положениях, соответствующих некоторым характерным точкам: сначала исходные пружины в свободном положении, ниже - пружины, соединенные с подвижным звеном 2, находящимся в нейтральном положении, и затем пружины с подвижным звеном, находящимся в крайнем левом положении. Далее в аналогичных положениях изображены пружины, жесткость одной из которых, а именно пружины 8, увеличена за счет уменьшения на один количества ее рабочих витков.На графике упругих характеристик пружин на оси абсцисс от точки ао вправо отложена величина деформации левой пружины 7, от точки 6,з влево отложена величина деформации правой пружины 8, а по оси ординат - значения соответствующих этим деформациям усилий. Точка О, в которой пересекаются эти характеристики, является нейтральной и соответствует положению подвижного звена 2 при равном и направленном в противоположные стороны воздействии пружин 7 и 8. Звено 2 при этом находится в равновесии в точке Со, Будучи переведенным из этого положения в крайнее левое положение в точке С-., где происходит срабатывание левого фиксатора 5, подвижное звено 2 запасается потенциальной энергией (соответствующей площади тре угольника а 06 г), которая расходуется на его перемещение вправо, до момента срабатывания второго фиксатора 6 в точке С р. Потери, имеющие место при таком перемещении, компенсируются дополнительной энергией, поступающей от двигателя. Оказавшись в правом крайнем положении, подвижное звено 2 также запасается энергией (соответствующей площади треугольника 60 аг), которая расходуется при его перемещении влево. Поскольку отрезки СоС . и СОС р равны, то равны и площади треугольников а 106 г и 60 аг, что говорит о равенстве энергии, запасаемой звеном в его крайних положениях. Следовательно, и количества дополнительной энергии, поступающей от двигателя 10 при прямом и обратном ходах, должны быть равными.В случае, если жесткость одной из пружин, например правой, окажется больше жесткости левой пружины, ее характеристика будет более крутой. Линия 6 ю 6 з, являющаяся характеристикой этой пружины, пересечет линию аюаз в точке 0, т. е. нейтральная точка сместится вправо (звено окажется в точке Со). Запас энергии подвижного звена 2, когда оно находится в правом крайнем положении, окажется меньше запаса его энергии в крайнем левом положении (чему соответствуют площади треугольников 6;Оаг и аО 6). Это потребует разных количеств дополнительной энергии при перемещении подвижного звена 2 в прямом и обратном направлениях. Поскольку мощность двигателя 10 должна подбираться по максимально необходимому пределу, так как непременным условием является возможность перемещения подвижно1298069 10 15 20 25 30 35 40 45 50 формула изобретения 55 3го звена на величину полного рабочего хода (Араб), то при перемещении подвижного звена 2 справа налево имеет место перерасход энергии, а при перемещении в противоположном направлении излишек энер. гии приводит к ударам о фиксатор 6. Избежать этого можно, обеспечив такую настройку пружин, при которой изменения их жесткости не приводит к смещению нейтрального положения подвижного звена 2. Простейшим способом является одинаковое увеличение жесткости обеих пружин. Если же необходимо изменить жесткость только одной пружины, а это может понадобиться, например, при затрудненном доступе к другой пружине, или если в приводе используется вообще только одна пружина, то можно поступить следующим образом. Для увеличения жесткости можно зафиксировать какой-нибудь виток пружины (в зависимости от того, что требуется по расчету) на том месте, которое он занимает, когда подвижное звено, с которым связана пружина, находится в нейтральном положении. Витки, оказавшиеся между подвижным звеном и этим зафиксированным витком, останутся рабочими, а другие сделаются нерабочими. Очевидно, что нейтральное положение подвижного звена при этом не изменится. Естественно, надо иметь в виду, что у пружины должен быть достаточный запас хода, т. е. для данной пружины существует минимальное число витков, которое еще может обеспечить возможность перемещения подвижного звена в пределах рабочего хода Хааа (от фиксатора 5 до фиксатора 6 и обратно). Характеристика пружины при этом также будет проходить через точку О (фиг. 2), но начало ее будет в точке 6, соответствующей положению ее находящегося в свободном состоянии конца, обычно соединенного с подвижным звеном. Если по условиям работы необходимо увеличить жесткость правой пружины на величину, которой соответствует уменьшение числа ее рабочих витков на один, то надо место зацепа пружины за корпус передвинуть на величину 1 влево (1 - шаг пружины при нейтральном положении подвижного звена) при одновременном исключении этого витка из работы. В этом случае количество энергии, запасаемое при перемещении подвижного звена в крайние положения, будет одинаковым (площадь треугольника Ь",Оа равна площади треугольника а 1062). Т. е. будет одинаковым и минимально необходимое количество дополнительной энергии для перемещения подвижного звена при прямом и обратном ходах. Удары на фиксаторах исключаются. Увеличение при необходимости количества исключаемых из работы витков требует пропорционального смешения места зацепа пружины6=ай,4где о - величина смещения места зацепа пружины, мм;1 - шаг пружины при нейтральном положении подвижного звена, мм;п - количество исключаемых из работывитков пружины.Причем а может быть как целым, таки дробным числом.При необходимости уменьшения жесткости пружины аналогичным образом увеличивают число ее рабочих внткв и смещают место зацепа в противоположную сторону.Узел крепления пружины, обеспечивающий соблюдение этого условия, приведен чафиг. 3. Он представляет собой пробку 9,имеющую с одной стороны винтовую нарезку для взаимодействия с пружиной 8,а с другой - резьбу, взаимодействующуюс резьбой корпуса 1, причем шаг этой резьбы равен шагу 1 пружины при нейтральном положении подвижного звена 2. Прц необходимости уменьшения числа рабочихвитков пружины 8 вращением пробки 9 производится как бы ее ввинчивацце в пружину на дополнительное количество витков,которые становятся нерабочими. При этомместо входа витков пружины в нарезку пробки (т, е. место зацепа) перемещается заодин оборот пробки ца величину шагав сторону подвижного звена, так как именнона это расстояние перемегцается пробка восевом направлении по резьбе корпуса.При необходимости исключить цз работы а витков нужно сделать соответственноп оборотов пробки,Если требуется увеличение числа рабочихвитков, то вращение пробки должно быть противоположным.На фиг, 4 представлен вариант исполнения узла крепления для случая, когда требуется уменьшение его осевых габаритов.Пробка здесь выполнена с внутренней винтовой нарезкой 12.Усовершенствованием узла крепления будет заключение его во втулку 13 (фиг. 5),имеющую внутреннюю резьбу, соответствующую резьбе узла крепления , а наружным диаметром взаимодействующую с отверстием корпуса 1 с возможностью осевогоперемещения в нем. Эта втулка упрощаетустановку исходного положения узла крепления (т. е. приведение в соответствие шага пружины при нейтральном положении подвижного звена шагу 1 резьбы пробки). После установки исходного положения втулкафиксируется на корпусе, например, двумяконтргайками 14, а вся необходимая регулировка жесткости пружины производитсятолько вращением пробки 9. Модуль резонансного манипулятора, содержащий звено с приводом его цсремеще1298069 пробки с дополнительной винтовой нарезкой, имеющей одинаковое с резьбой пробки направление, а шаг резьбы пробки равен шагу пружины при нейтральном положении звена, при этом витки концевой части пружины расположены в канавке винтовой нарезки пробки. ния, включающим двигатель и по меньшей мере одну пружину, закрепленную одним концом на звене, а другим на корпусе модуля, отличающийся тем, что, с целью снижения энергозатрат, пружина снабжена регулятором ее жесткости, выполненным в виде ввинченной в корпус манипулятора г 4 Составитель С. НТехред И. ВересТираж 954комитета СССР по два, Ж - 35, Рауьвскаическое предприятие,вик пам из наб.,. Ужго
СмотретьЗаявка
3852857, 06.02.1985
ПРЕДПРИЯТИЕ ПЯ А-1001
БЕЛОВ ВЛАДИМИР ИВАНОВИЧ, ЮРЧЕНКОВ ВАЛЕНТИН ФЕДОРОВИЧ, КОШЕЛЬ ВИКТОР АНДРЕЕВИЧ
МПК / Метки
МПК: B25J 9/00
Метки: манипулятора, модуль, резонансного
Опубликовано: 23.03.1987
Код ссылки
<a href="https://patents.su/4-1298069-modul-rezonansnogo-manipulyatora.html" target="_blank" rel="follow" title="База патентов СССР">Модуль резонансного манипулятора</a>
Устройство для фиксации подвижных звеньев механизма

Номер патента: 1656199
Опубликовано: 15.06.1991
Авторы: Андриенко, Галактионов, Хасилев
МПК: B66C 23/88, F16B 21/12
Метки: звеньев, механизма, подвижных, фиксации
...смонтированные на штоках 2. Свободные концы последних шарнирно связаны с концами балансира 6 посредством осей 8, Стыкуемые и фиксируемые звенья 9 и 10 механизма выполнены с отверстиями под пальцы, на звене 9 закреплен гидроцилиидр 1,Устройство работает следующим образбм,Гидроцилиндр 1 из показанного иа фиг.1 пунктиром положения переходит в положение, показанное сплошными линиями. При этом балансир 6 воздействует на штоки 2, которые перемещают зубчатые колеса 5 и вводят части 3 и 4 пальцев в отверстия звеньев 9 и 10, При этом обе части 3 и 4 каждог. альца движутся одновременно.В случае несоосности пальцев и отверстий звеньев Р и 10 в стенку одного иэ отверстий звена 10 упрется одна из частей 3 или 4 пальца. Если ось пальца смещена...
Пружинно-фрикционный поглощающий аппарат автосцепки железнодорожного подвижного состава

Номер патента: 1093590
Опубликовано: 23.05.1984
Авторы: Беренштейн, Болдырев, Кеглин, Киреев, Никольский, Поляков, Прасолов
МПК: B61G 9/04
Метки: автосцепки, аппарат, железнодорожного, поглощающий, подвижного, пружинно-фрикционный, состава
...и энергоемкость аппарата приближаетСя к энергоемкости пружинногокомплекта,.Целью изобретения является повышение надежности.укаэанная цель достигается тем,что пружинно-фрикционный поглощаю,щий аппарат, содержащий корпус,в котором размещены нажимной конус,фрикционные клинья, расположенные. в контакте с поджатой пружинамиопорой, подвижные фрикционные плас,тины, неподвижные фрикционные пластины и,стяжной болт, снабжен тягами для соединения подвижных фрикционных пластин с нажимным конусом.Кроме того, тяги выполнены заодно с подвижными фрикционными пластинами и с выступами в их верхней части,анажимной конус выполнен с впадинами,вкоторые входят указанные выступы.51 О 2Кроме того, тяги выполнены в верхней части нажимного конуса и заодно с...
Устройство для фиксации подвижных звеньев

Номер патента: 1638380
Опубликовано: 30.03.1991
Авторы: Андриенко, Кошеленко, Хасилев
МПК: B66C 23/68, F16B 1/00
Метки: звеньев, подвижных, фиксации
...6.Предлагаемое устройство работает следующим образом,Для фиксации охватываемое звено(фиг,1) перемещается вверх до входа конического конца пальца 4 в коническое отверстиегайки 7. При несовпадении их осей происходит автоматическое самоцентрирование врезультате взаимодействия конических поверхностей, причем ползун 3 с пальцем 4перемещается вдоль оси Х, а ползун 6 сгайкой 6 - вдоль оси У, При наличии нескольких пунктов фиксации указанный процесс в равной мере распространяется навсе пункты, причем подъем продолжаетсядо соприкосновения нарезок всех пальцевс нарезками гаек, При этом тот или иной 5 10 15 20 25 30 35 40 45 50 палец, преодолевая сопротивление пружи.ны, погружается в расточку ползуна 3. Подьем продолжается дальше до...
Соединительное звено режущих звеньев пильной цепи

Номер патента: 74577
Опубликовано: 01.01.1949
МПК: B27B 17/00, B27B 33/14
Метки: звено, звеньев, пильной, режущих, соединительное, цепи
...предлагается соединительное звено режущих звеньев пильной цепи.На фиг. 1 схематично изображен общий вид пильного полотна с предлагаемым соединительным звеном; на фиг. 2 - разрез по АА.Соединительное звено 1 представ. ляет собой цельную пластину, изогнутую по плоскости симметрии, образующую щеки 4 и б, которые охватывают выступающие части режу щих звеньев 2 и 3.На щеках 4 и 5 соединительного звена 1 имеются боковые впадины б . для головок заклепок 7, являющихся осью шарниров, соединяющих . звенья пыльной цепи. В центре впадины имеется отверстие 8, в которое вставляется заклепка. Предмет изобретения Соединительное звено режу:цих звеньев пильной цепи, о т л и ч а ющ е е с я применением цельной пластины, согнутой в плоскости симмет. рии...
Способ управления перемещением подвижного звена резонансного манипулятора

Номер патента: 1785889
Опубликовано: 07.01.1993
Авторы: Акинфиев, Бабицкий, Белов, Кошель, Юрченков
МПК: B25J 9/00
Метки: звена, манипулятора, перемещением, подвижного, резонансного
...в том,что время со работы, электродвигателя 5 меньше времени,Т перемещения подвижного звена 2 иосуществляется следующим образом,Подвижное звено 2 перед началом движения находится в одном из крайних положений, где удерживается защелкой 7. При этом упругий элемент 3 находится в сжатом; ненапряженном состоянии, а упругий элемент 4 растянут и воздействует на подвижное звено 2 в направлении противо-, положного крайнего положения.Расфиксация подвижного звена 2 происходит после подачи напряжения на защелку 7, При этом подвижное звено 2 под действием упругого элемента 4 начинает движение, Насадка 6 электродвигателя 5, находясь в контакте с подвижным звеном 2, раскручивается им. Это вращение передается на вал электродвигателя 5, который...
Предыдущий патент: Устройство для разметки сопрягаемых труб
Следующий патент: Манипулятор
Случайный патент: Способ определения активности глутатионтрансферазы