Схват манипулятора
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 1096098
Авторы: Градецкий, Филиппович, Чурсин




Текст
(56) 1.Ав6593 77 О/25-08 8384, Бюл. 9 2 радецкий, В,и иппович инут проблем ме ник УДАРСТ 8 ЕННЫЙ КОМИТЕТ СССРДЕЛАМ ИЗОБРЕТЕНИЙ И ОТКРЫТИИ 29,72(088,8)торское свидетельство СССР Р кл, В 25,7 15/00, 1977. (54)(57) 1. СХВАТ МАНИПУЛЯТОРА, содержащий основание, на котором установлены зажимные губки, кинематически связанные между собой и снабженные приводом их перемещения, датчик линейного перемещения со штоком, связанный через систему управления с приводом,о т л н ч а ю щ и йс я тем, что, с целью исключения повреждения деталей при захватывании, он снабжен датчиками усилия сжатия, установленными на губках, генератором, усилителем, блоком детектирования и блоком компенсации, при этом датчик усилия сжатия выполнен в виде пьезоэлектрического полого цилиндра, снабженного электродами,установленными на торцах, пьезоэлектрического стержня, снабженного электродами, установленными на торцах, расположенного внутри цилиндра и жестко с ним связанного через диэлектрическую прокладку, и мембраны, жестко соединенной с губкой и связанной через шаровую опору, закрепленную в сепараторе, со стержнем, а электроды цилиндра соединены с генератором, при этом электроды стержня подключены к входу усилителя, а выход усилителя соединен с одним из входов блока детектирования, другой вход которого подключен к выходу блока компенсации, а выход блока детектирования соединен с входом систе- ф мы управления.З2. Схват по п.1, о т л и ч а ю - щ и й с я тем, что он снабжен закрепленным на основании кронштейном, С в котором выполнен паз, и втулкой с цанговым зажимом, расположенной в пазу кронштейна с возможностью перемещения. вдоль губок, причем датчик линейного перемещения установлен во втулке.Изобретение относится к машиностроению и может быть использованодля автоматизации производственныхпроцессов с применением промышленных роботов, снабженных очувствленными схватами. 5Известен схват манипулятора, содержащий основание, на котором установлены зажимные губки, кинематически связанные между собой и снабженные приводом их перемещения, и датчик линейного перемещения со штоком,связанный через систему управленияс приводом Г 13.Однако данное устройство не обеспечивает точного измерения и дозирования усилия сжатия, адекватноговесу захватываемого объекта вследствие отсутствия датчика, измеряющегоэто усилие, непосредственно прилагаемое к объекту,что может привести к деформации и излому захватываемого объекта.Цель изобретения - исключение повреждения деталей при захватывании.Поставленная цель достигается тем, что схват мунипулятора, содержащий основание, на котором установлены зажимные губки, кинематически связанные между собой и снабженные приводом их перемещения, датчик линейного перемещения со штоком, связанный через систему управления с приводом, снабжен датчиками усилия сжатия, установленными на губках, генератором, усилителем, блоком детектирования и блоком компенсации, при 35 этом датчик усилия сжатия выполнен в виде пьезоэлектрического полого цилиндра, снабженного электродами, установленными на торцах, пьезоэлектрического стержня, снабженного 40 электродами, установленными на торцах, расположенного внутри цилиндра и жестко с ним связанного через диэлектрическую прокладку, и мембраны, жестко соединенной с губкой и связанной через шаровую опору, закрепленную в сепараторе, со стержнем, а электроды цилиндра соединены с генератором, при этом электроды стержняподключены к входу усилителя, выход усилителя соединен с одним из входовблока детектирования, другой вход которого подключен к выходу блока компенсации, выход блока детектирования соединен с входом системы управления.551(роме того, схват снабжен закрепленным на основании кронштейном, вкотором выполнен паз, и втулкой с цанговым зажимом, расположенной в пазу кронштейна с возможностью пере- бОмещения вдоль губок, при этом датчик линейного перемещения установлен во втулке.На фиг. 1 изображен схват манипулятора общий вид; на фиг, 2 - вид 65 А на фиг1;,на фиг. 3 - разрез Б-Бна фиг, 1,Схват манипулятора состоит изоснования 1, звеньев 2 привода перемещения разъемных губок 3 схвата ииндуктивного датчика 4 линейногоперемещения с подвижным штоком,выход которого связан с системой 5управления робота. В каждую губку 3схвата встроен изолированный откорпуса губки коробкой б датчик 7усилия сжатия, выполненный в видепьезоэлектрического полого цилиндра8 и цилиндрического стержня 9, входящего в него. Шаровая опора 10 закреплена в сепараторе 11 и кинематически связывает стержень 9 с мембраной 12, которая жестко закрепленана торцовой поверхности губки З.Приэтом полый цилиндр 8 и входящий внего стержень 9 жестко связаны междусобой через диэлектрическую прокладку 13, а электроды 14, установленные на торцах полого пьезоэлектрического цилиндра, соединены с генератором 15. Торцовые электроды 16,пьезоэлектрического стержня соединены с усилителем 17, выход которогоподключен к одному из входов блока18 детектирования, другой вход которого соединен с блоком 19 компенсации,Выход блока детектирования соединенс входом системы 5 управления, выход которой подключен к приводуперемещения губок схвата (не показан ).Датчик 4 линейного перемещенияустановлен во втулке 20, в нижнейчасти которой имеется цанговый зажим 21, обеспечивающий вертикальноеперемещение датчика .относительно губок схвата, втулка 20 соединена скронштейном 22, в котором сделан паз23 для обеспечения горизонтальногоперемещения датчика относительногубок схвата, при этом кронштейн 22жестко соединен с основанием 1схвата.Вертикальное и горизонтальноеперемещение датчика линейного перемещения позволяет точно устанавливатьего относительно захватываемой детали 24 и тем самым способствует точности измерения усилия сжатия.Схват манипулятора работает следующим образом.Схват с разведенными губками подводится к захватываемой детали 24так, что последняя оказывается междугубками 3. Система 5 управления подает команду на опускание схвата.При опускании схвата шток датчика 4входит в соприкосновение с деталью иподнимается в верхнее положение.После этого в систему 5 управленияпоступает команда на остановку схвата и сжатие детали. Сигнал управления поступает на привод перемещениягубок схвата ( не показан ), который приводит их в движение. Усилие сжатия через мембрану 12 и шаровую опору 10 воздействует на пьезоэлектрический цилиндрический стержень 9, который жестко соединен через ди электрическую прокладку 13 с полым пьезоэлектрическим цилиндром 8. Диэлектрическая прокладка изолирует генераторную секцию полого цилиндра от информационной секции, связанной 0 со стержнем. Материал диэлектрической прокладки выбирается из условия совпадения акустических сопротивлений пьезоэлектрических элементов и прокладки, что уменьшает ослабление 15 механического сигнала на границе раздела.При подключении электродов 14 полого цилиндра 8. к генератору 15, настроенному на резонансную частоту йродольных колебаний, на электродах 16 цилиндрического стержня 9 появляется электрический заряд, изменяющийся с частотой механических колебаний полого цилиндра 8, амплитуда которого зависит от измеряемого статического усилия сжатия, прикладываемого к детали 24.Блок 19 компенсации сдвигает начало отсчета усилия сжатия в нулевую точку характеристики, поэтому при увеличении усилия сжатия ЗО сигнал, поступающий в систему 5 управления, будет не уменьшаться, а увеличиваться, сравниваться с сигналом управления задающего устройства,расположенного в системе 5 управления,и отрабатываться приводом перемещения губок схвата. После сравненияэтих сигналов система управления по"дает команду подъема охвата. Ввидунедостаточности сжимающего усилиязахватываемый объем остается на месте или в процессе подъема схвата начинает проскальзывать в.губках. Следовательно, шток датчика 4 начинаетопускаться. Сигнал с датчика 4 поступает в систему управления, котораяавтоматически начинает отрабатыватьнедостающее сжимающее усилие. Придостаточном для эахватывания усилиидеталь начинает подниматься вместесо схватом и шток датчика 4 переста"ет перемещаться, прекращая увеличивать сигнал дозирования сжимающегоусилия. Деталь захвачена. Применение предлагаемой конструкции схвата позволяет повысить точность измерения и дозирования усилия сжатия широкого по весу класса деталей с силой, не превышающей необходимую для захватывания и исключающей деФормацию и излом деталей, а также сэкономить энергетические ресурсы, затрачиваемые на захват деталей при их транспортировке, и увеличить производительность труда за счет сокращения времени, необходимого на операцию захвата деталей.
СмотретьЗаявка
3567000, 07.01.1983
ИНСТИТУТ ПРОБЛЕМ МЕХАНИКИ АН СССР
ГРАДЕЦКИЙ ВАЛЕРИЙ ГЕОРГИЕВИЧ, ФИЛИППОВИЧ ВЛАДИМИР ИВАНОВИЧ, ЧУРСИН АНАТОЛИЙ СЕМЕНОВИЧ
МПК / Метки
МПК: B25J 15/00
Метки: манипулятора, схват
Опубликовано: 07.06.1984
Код ссылки
<a href="https://patents.su/4-1096098-skhvat-manipulyatora.html" target="_blank" rel="follow" title="База патентов СССР">Схват манипулятора</a>
Способ непрерывного перемещения сжатого зернистого слоя

Номер патента: 426674
Опубликовано: 05.05.1974
Автор: Изоб
МПК: B01D 24/34
Метки: зернистого, непрерывного, перемещения, сжатого, слоя
...фильтрациями участвует не весь слой, а возникающие при егодвижении силы врения неравномерно распределены,на поверхности слоя.Цель предлагаемого изобретения - увеличение эффективного объема работающегослоя и равномерного распределения сил трения на его поверхности.20Для этого в фильтрующейся сквозь зернистый слой жидкости перепада давления ЛР,обеспечивающего движение слоя при ЛРз) Р 1 р,где Р - величина проекции перепада давления в слое иа направление его 25движения;Г,р - сила трения, препятствующая,продвижению слоя.На чертеже изображено предбретение.0 Фильтр содержит корпус 1, загруженный фильтрующим материалом 2, образующим зернистый слой, устройства для ввода 3 и вывода 4 указанного материала, устройство для вывода очищенной...
Устройство управления усилием схвата манипулятора

Номер патента: 1266733
Опубликовано: 30.10.1986
Авторы: Кондратенко, Суляев, Филаретов
МПК: B25J 13/00
Метки: манипулятора, схвата, усилием
...сравнения 9не произойдет обнуление сигнала. Аобнуление сигнала произойдет. лишьтогда, когда переместившийся движок д датчика положения 7 обеспечит появление на выходе этого датчика напряжения, равного напряжению задающегосигнала с выхода программного устройства 20. После остановки звена 5 уп- .ругий элемент 6 будет растянут на величну, определяемую величиной сигнала с выхода программного устройства.Усилие растянутого упругого элементачерез рейку 4 будет передаваться захватным рычагам 2, которые и обеспечат программное сжатие объекта.Сигнал обратной связи с датчикаположения 7 поступает на вход программного устройства 20. Поэтому после отработки приводом 3 заданного 40входного воздействия программное устройство 20 выдаст команду на...
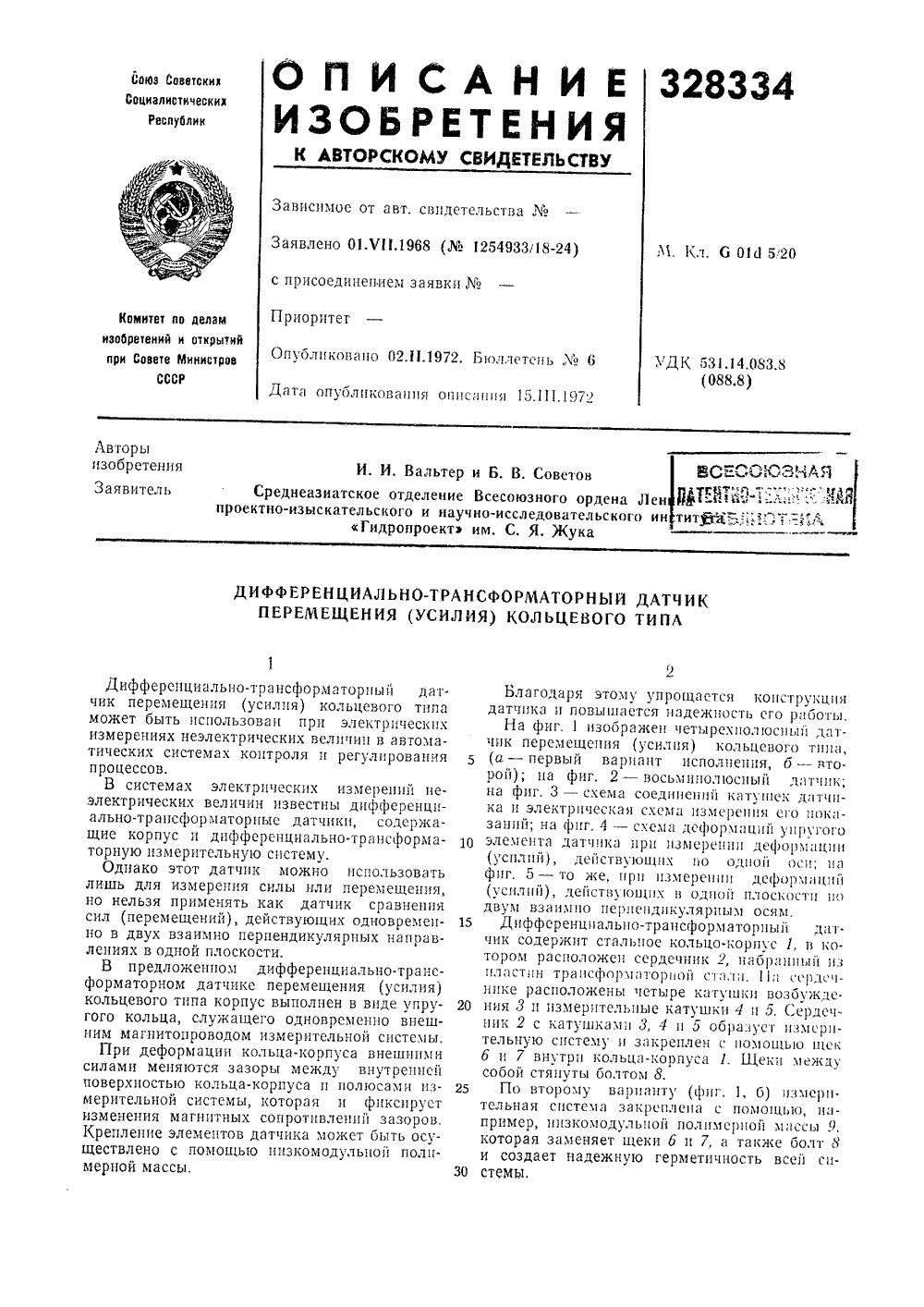
Дифференциально-трансформаторный датчик перемещения (усилия) кольцевого типа
Номер патента: 328334
Опубликовано: 01.01.1972
Авторы: Вальтер, Научно, Советов, Среднеазиатское, Тентйо, Тит
МПК: G01D 5/20
Метки: датчик, дифференциально-трансформаторный, кольцевого, перемещения, типа, усилия
...ния г и измерительные катушки 4 п 5. Сердсчник 2 с катуыка.п 3, 4 ц д Образует измерительную систему и закреплен с помощью щекб и 7 Внутэп 1 Ольца:.01 гпуса 1. Щеки междусобой стянуты болтом 8.25 По второму варианту (фпг, 1, б) пзмерп.тельная сцстеа заа 1 геплепа с помоць 10, и 1 пример, пизкомодульной полимерной массы 9,которая заменяет щеки б и 7, а также болт 8и создает надежную герметичность всей сп 30 стЕМЫ,,уг Между измерительной системой, состоящей из сердечника 2 с катушками 3, 4 и 5, и кольцом-корпусом 1 образуются рабочие зазоры 10 и 11. На поверхности кольца-корпуса находятся точки приложения сил: вертикальные 12 и горизонтальные И. Зазоры 14 не являются рабочими. Датчик может быть выполнен и с другим расположением...
Датчик для измерения усилия вызываемого весом, давлением или другим механическим воздействием

Номер патента: 218497
Опубликовано: 05.05.1976
Авторы: Алания, Гольдман, Сисоян, Шапиро, Шнайдер
МПК: G01L 3/26
Метки: весом, воздействием, вызываемого, давлением, датчик, другим, механическим, усилия
...обраПод воздейстсжимающего маг о усилия, ого эле выравни- окрашаетем преобразуемог итопровод активнмагнитопровода ие между ними с мента 6, пластин ваются и расстоя ся. Выравнивание преобразуемого у ; упругую деформа ния механического (ются в исходное на конструктивная схе а чертеже по атчика.пластин под воздействием илия представляет собойциюизгиба. Послеисчезновеусилия пластины возвра.ца-, положение и между ними с 1 с перемычкой резиновой манжезмеряемое усилие атчик содержит кор одушку Я и диск 4 5, воспринимаюшие ктивныи 6 и пассив 2, п той,", а3 21 вновь образуются воздушные зазоры прежней величины,Уплотнение магнитопровода при сближе-ции пластин приводит к увеличению потерьна вихревые токи и следовательно, к умень,шению...
Датчик осевого усилия, действующего на шланг

Номер патента: 465566
Опубликовано: 30.03.1975
Авторы: Волковицкий, Гладышев, Зимов
МПК: G01L 1/22
Метки: датчик, действующего, осевого, усилия, шланг
...к давлениконцентрично расп30 пенчатой втулкой,Изобретение относится к области силоизмерительной техники.Известные датчики осевого усилия, действующего на шланг, содержащие цилиндрический патрубок и тензорезисторы, имеют низкую точность из-за чувствительности датчика к давлению жидкости,Предлагаемый датчик снабжен концентрично расположенной с патрубком ступенчатой втулкой, концы которой, прикрепленные к шлангу, обхватывают через уплотнители патрубок с возможностью осевого перемещения относительно патрубка, а тензодатчики установлены на наружной и внутренней цилиндрических поверхностях тонкостенного выступа, которым снабжена втулка.Благодаря этому исключается чувствительность датчика к давлению жидкости,На чертеже показана конструкция...
Предыдущий патент: Захват
Следующий патент: Схват манипулятора
Случайный патент: Приемно-перегрузочное устройство