Цифровая система программного управления с адаптивным позиционированием привода
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 943646
Авторы: Нестеров, Смоленский

Текст
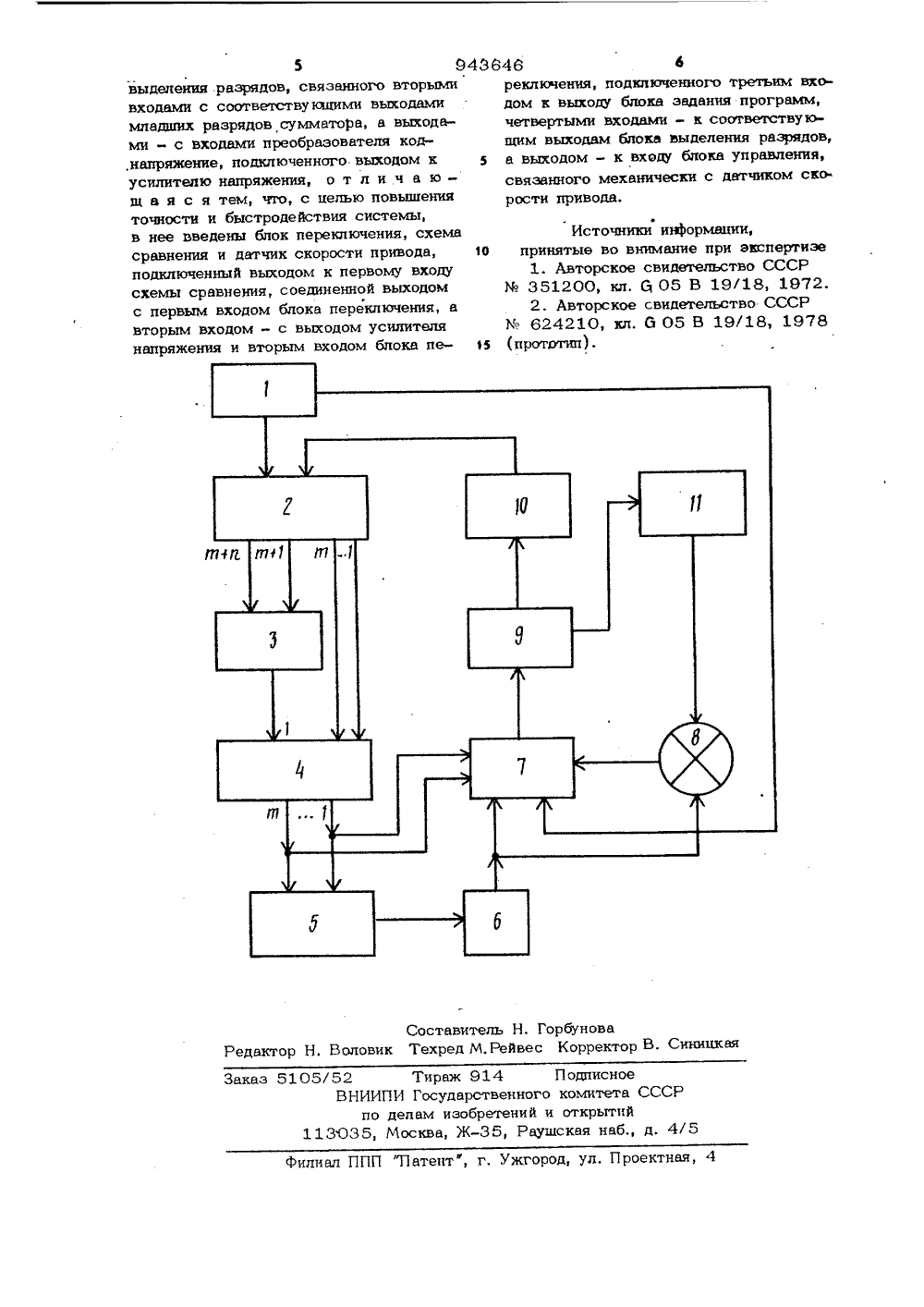
ОП ИСАНИЕИЗОБРЕТЕНИЯК АВТОРСКОМУ СВИДЕТЕЛЬСТВУ Союз Советски кСоциапистическикРеспублик в 943646(5 )М, Км. 6 05 В 19/18 ЬеудерствевввЯ квинтет СССР пв деми нмбретенкЯ и открцтвЯ(72) Авторы изобретения О, В. Смоленский и Н. Д. Нес одв сТульский ордена Трудового Красного ЗйЖлениполитехнический институт(54) ЦИФРОВАЯ СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ С АДАПТИВНЫМ ПОЗИЦИОНИРОВАНИЕМ ПРИВОДА 1Изобретение относится к автоматическому управлению следящими приводами и может быть применено в цифровых системах управления перемещением различных объектов.5 Известна цифровая система програм,много управления, содержащая входное устройство, блок текущего положения управляемого объекта, цифровую часть1 О сравнения заданного и текущего значения положения объекта, воздействующую на релейный блок управления перемещением объекта, соединенный через редуктор и датчик обратной связи с блоком теку 15 щего положения объекта 1 .Недостатком данной системы является то, что релейный блок управления обеспечивает наиболее быстрое торможение лишь малоинерционных обьектов гр с малыми скоростями, а при большой скорости и массе объекта управления не позволяет остановить его в заданном положении, а это приводит к снижению точности и быстродействия системы в целом.Наиболее близким по техническому решению к данному изобретению являеься цифровая система программного управления, содержащая последовательно соединенные блок управления, датчик перемещения, сумматор, вход которого соединен с выходом блока задания программы, а выходы старших разрядов сумматора подключены к входам элемента ИЛИ, блок выделения разрядов, один вход которого соединен с выходом элемента ИЛИ, а другие входы подключены к соответствующим выходам младших разрядов сумматора, преобразователь код-напряжение и усилитель 21 Недостатком данной системы является одностороннее схемное программирование движения привода, в то время как скорость следящего привода в большинстве случаев обуславливается целым рядомтехнологических при цщ.3 9436Цель изобретения - повьппение точности и быстродействия системы.Поставленная цель достигается тем, что в цифровую систему программного управления с адаптивным позиционированием привода, содержащую включенные последовательно блок управления, датчик перемещения и сумматор, соединенный вторым входом с выходом блока задания программ, а выходами старших разрядов -1 о с ишдами элемента ИЛИ, подключенного выходом к первому входу блока выделения разрядов, связанного вторыми входами с соответствующими выходами младших разрядов сумматора, а выхо-5 дами - с входами преобразователя коднапряжение, подключенного выходом к усилителю напряжения, введены блок пе- реключения, схема сравнения и датчик скорости привода, подключенный выходом к первому входу схемы сравнения, соединенный выходом с первым входом блока переключения, а вторым входом - с выходом усилителя напряжения и вторым входом блока переключения, подключенного третьим входом к выходу блока задания программ, четвертыми входами - к соответствукхцим выходам блока выделения разрядов, а выходом к . входу блока управления, связанного механически с датчиком скорости привода.На чертеже изображена структурная схема системы.Система содержит блок 1 задания программ, сумматор 2, элемент ИЛИ 3, блок 4 выделения разряда, преобразователь 5 код-напряжение, усилитель 6 напряжения, блок 7 переключения, схема 8 сравнения, блок 9 управления, датчик 10 перемещения, датчик 11 скорости40 привода.Система работает следующим образом.Блок 1 задания программы выдает заданные величины перемещения на второй вход сумматора 2 и скорости привода на блок 7 переключения на третий вход. Заданная величина скорости поступает в блок 7 переключения, который передает его в блок 9 управления. Блок 9 управления воздействует на датчики 10 и 1 1. 50 Импульсы с датчика 10 перемещения поступают на первый вход сумматора 2. Сумматор 2 формирует код разности заданного и текущего положения привода, при атом Ю младших разрядов кода разности, которые соответствуют схемно заложенной зоне торможения, поступают в блок 4 выделения разряда, а И стар 46 1ших разрядов в элемент ИЛИ 3. С выхода элемента ИЛИ 3 в блок 4 выделеаия разряда поступает запрещающий сигнал. При достижении приводом зоны торможения запрещающий сигнал, соответствующий обнулению старших разрядов снимаеъ. ся и блок 4 выделения разрядов разрешает прохождением младших разрядов в преобразователь 5 код-напряжение, По е младших разрядов преобразователь 5 код-напряжение формирует напряжение, соответствующее зоне торможения, которое через усилитель 6 поступает в блок 7 переключения и в схему 8 сравнения как сигнал скорости программного торможения. В схеме 8 сравнения сравнивается текущее значение скорости привода, поступающей от датчика 11 скорости с величиной скорости программного торможения, При равенстве сигналов схема 8 сравнения выдает импульс в блок 7 переключения, что приводит к переключению блока 7, Блок 9 управления переходит на режим программного торможения по сигналу, поступающему из усилителя 6 через блок 7 переключения. При совпадении кодов текущего и заданного значений код разности становится равным нулю, напряжение на входе блока 9 управления равно нулю, что соответствует остановке привода в заданной точке, С выхода блока 4 выделения разрядов, находящихся в нулевом состоянии, в блок 7 переключения посчупает сигнал, переключающий его в первоначальное положение.Использование новых элементов - датчика скорости, схемы сравнения скоростей, блока переключения, обеспечивает автоматическое регулирование величины тормозного пути в функции от величины скорости привода, что обуславливает повышение точности и быстродействие системы и расширение области применения систем, например, в станкостроении, радиолокации и т.п.Формула изобретенияПифровая система программного управления с адаптивным позиционированием привода, содержащая включенные последовательно блок управления, датчик перемещения и сумматор, соединенный вторым входом а выходом блока задания программ, а выходами старших разрядов - с входами элемента ИЛИ, подключенного выходом к первому входу блокаИсточники инФормации,10 принятые во внимание при акспертизе 1. Авторское свидетельство СССР% 351200, кл, 5 05 В 19/18, 1972,2. Авторское свидетельство СССР624210, кл. б 05 В 19/18, 1978 л (прототип), Составитель Н. Горбуноваор Н, Воловик Техред М.Рейвес Корректор В. Сини 05/52 Тираж 914 ВНИИПИ Государственног по делам изобретений 113 О 35, Москва, Ж, РауЗака одписное омитета открытий кая наб Филиал ППП "Патент", г, Ужгород, ул, Проектная, 4 5 9438выделения разрядов, связанного вторымивходами с соответству кзцими выходамимладших разрядов сумматора, а выходами - с входами преобразователя код,напряжение, подключенного. выходом кусилителю напряжения, о т л и ч в ющ а я с я тем, что, с целью повышенияточности и быстродействия системы,в нее введены блок переключения, схемасравнения и датчик скорости привода,подключенный выходом к первому входусхемы сравнения, соединенной выходомс первым входом блока переключения, авторым входом - с выходом усилителянапряжения и вторым входом блока переключения, подключенного третьим входом к выходу блока задания программ,четвертыми входами - к соответству ющим выходам блока выделения разрядов,а выходом - к входу блока управления,связанного механически с датчиком скорости привода.
СмотретьЗаявка
2936290, 06.06.1980
ТУЛЬСКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ, ПРЕДПРИЯТИЕ ПЯ Г-4086
СМОЛЕНСКИЙ ОЛЕГ ВЯЧЕСЛАВОВИЧ, НЕСТЕРОВ НИКОЛАЙ ДМИТРИЕВИЧ
МПК / Метки
МПК: G05B 19/19, G05B 19/416
Метки: адаптивным, позиционированием, привода, программного, цифровая
Опубликовано: 15.07.1982
Код ссылки
<a href="https://patents.su/3-943646-cifrovaya-sistema-programmnogo-upravleniya-s-adaptivnym-pozicionirovaniem-privoda.html" target="_blank" rel="follow" title="База патентов СССР">Цифровая система программного управления с адаптивным позиционированием привода</a>
Привод постоянной скорости машины

Номер патента: 419671
Опубликовано: 15.03.1974
МПК: F16H 49/00
Метки: постоянной, привод, скорости
...с ведущимгалом дополнительного меанцческого усилителя 2. Его ведомый зал 7 соединен с управляющим валом 6 вспомогательного дифференпиального мехаизма 4, а ведущие валы 8 ме аннзмов 4 и 6 соед:шены с приводным двигателем 9. Всдомь Вал механического усилителя 0 соедПиен с угцравляющцм валом 6 основого дифференциального механизма 5, ведо.ый вал которого подключенВал 11 машц ны.Пр определсшых условиях скорость заламашины целиком определяется скорость упраВляощсго Вала 6 Вспомогательного дифференцналь.0 о меа;зм 4 н нс зсвисит От скорости пр:г:Одного дв:гатсл 5 9.За;ат 1 скорости, цме 5 постоянну 0 скорость, с. сз )еха,:Сок.ц хсцлцтель 2 задает постоянную скорость управляющему валу 6 )ехацз, т 4Танц) ОбразО), Прн )иределеньх слОВпях)...
Стабилизатор тока дугового разряда

Номер патента: 1185548
Опубликовано: 15.10.1985
Автор: Нафтулин
МПК: H02M 7/04
Метки: дугового, разряда, стабилизатор
...с запрещающими входами элементов ЗАПРЕТ 25 и 26 ичерез формирователь 32 импульсов -с управляющим электродом разрядноготиристора 18, а другой выход - с за прещающими входами элементов ЗАПРЕТ27 и 28 и через формирователь 33 импульсов - с управлякнцими электродамитиристора 19. Обозначения элементовпреобразователей 1 и 2 отмечаютсяиндексами.Элементы ионного источника: нить34 накала катода подключена к отрицательному выводу конденсатора 22,а подогревный катод 35 подключен 15 к положительному выводу 22 ; анод 36подключен к положительному выводуконденсатора 22.Между положительным выводом конденсатора 22 и отрицательным выво дом конденсатора 22 подключен датчик 37 отклонения тока дугового разряда, выход его и выход оптрона 38включения...
Устройство для регулирования скорости тяговых электродвигателей транспортного средства

Номер патента: 1036583
Опубликовано: 23.08.1983
Авторы: Буравлев, Вершинин, Добрынин, Мартынов, Рудаков, Филиппов
МПК: B60L 9/08
Метки: скорости, средства, транспортного, тяговых, электродвигателей
...двигателя 3 подключен к оцному из входов второго блока 16 сравнения, другой вход которого соединен с эадатчиком 17 скорости, а выход - к другому входу второго дополнительного блока 16 сравнения. Выход блока 15 сравнения через другой согласующий уси- . литель 18 соединен с другим входом первого блока 8 сравнения.,Устройство для регулирования скороо ти тяговых двигателей транспортного средства работает следующим образом.В установившемся режиме движения обмотки б возбуждения тяговых электродвигателей 3 и 4 получают питание от независимого возбудителя 6, а якорные обмотки тяговых электродвигателей 3 и 4 получают питание от тиристорного регулятора 1. В блоке 16 сравнениясравниваются сигналы задания скорости от эадатчика 17 скорости и текущего...
Реверсивный электропривод

Номер патента: 1112519
Опубликовано: 07.09.1984
МПК: H02P 5/06
Метки: реверсивный, электропривод
...тиристорным преобразователям, последовательно связанные регулятор скорости, блок сравнения, регулятор тока, блок управляющего напряжения, систему импульсно-фазового управления с двумя согласующими элементами, выходами подключенными к тиристорным преобразователям, датчики тока якоря и скорости электродвигателя, связанные с соответствующими регуляторами, дополнительно введены блок определения полярности действительного значения тока, блок определения полярности и командная схема, первые два входа которой подключены через блок определения полярности к регулятору скорости, третий вход связан с датчиком тока, другой вход которого через блок определения полярности действительного значения тока соединен с блоком сравнения и с...
Устройство управления лифтом

Номер патента: 1781155
Опубликовано: 15.12.1992
Авторы: Волох, Жиленков, Карасов, Карпов, Куценко, Москвич, Столяров, Струневич, Сургов, Штанько
Метки: лифтом
...датчиков, Блоки 24, 25, 28, 30, 31, 34 - узел 48 селекции.Устройство работает следующим обра-зом.Пассажиры в процессе эксплуатации лифта воздействуют на кнопки вызовов в блоке 1 и кнопки приказов в блоке 3, Эти требования пассажиров регистрируются в блоке 2,4, а индикация зарегистрированных вызовов и приказов высвечивается в блоках 5, 6. Зарегистрированные требования пассажиров блок 8 подключает по командам из блоков 9, 11 к блокам 13, 14, для определения предстоящего направления движения кабины, и к блоку 15, для замедления и остановки кабины. Приказы подключаются блоком 9 по команде, которая формируется при загруженной кабине, фиксируемой датчиком 10, при наличии приказов, определяемых блоком 7, и при открытых дверях, фиксируемых...
Предыдущий патент: Устройство для программного управления процессом крашения материала
Следующий патент: Система управления пневматическим манипулятором
Случайный патент: Теплопровод