Адаптивная система регулирования
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки



Текст
Союз Советских Социалистических Реснубпик(21) 2653870/18 24ки Мо Кл.05 В 13/02 с присоединением з арствеииый комитетСССРделам изобретенийи открытий(23) Приоритет Опубликован 5.0381, Бюллетень М 2-50088,8 Дата опубликования описания 150381,М. Шубладзе, Р,М, Сургуладзе, С,В, Гу .11, Лапченко, Р.В, Гогитадзе и Н.Н. Ца Ордена Ленина институт проблем управления АН 71) Заявитель Я СИСТЕМА РЕГУЛИРОВАНИЯ АДАП ия.а содержит задатчрой усилители 2 Изобретение относится к автоматике и может быть использовано в авиации для управления подвижными объектами, а также для управления промышленными объектами, имеющими экстремальную характеристику,Известны регуляторы, используемыедля регулирования объектом со знакопеременным коэффициентом усиления 1)Наиболее близким по техническойсущности и достигаемому результатук предлагаемому является система,содержащая первый дифференциатор ипервый усилитель, выход которого через первый сумматор и первый последовательно соединенные интегратор ипервый сумматор соединен со входомобъекта управления, выход которогосоединен с первым входом второго сумматора, второй вход которого соединен с эадатчиком 2.Недостатком этой системы является ее малая помехоустойчивость, таккак при изменении знака коэФфициентаусиления объекта система теряет устойчивость,Цель изобретения - повыщение помехоустойчивости, управление объектами со знакопеременным коэффициентом усиления,Поставленная цель достигается тем,что в систему дополнительно введеныблок Формирования уставки, ключ, последовательно соединенные второй дифференциатор, третий сумматор, первыйблок определения модуля, четвертыйсумматор, реле, третий дифференциатор, триггер и блок умножения и последовательно соединенные пятый сумматор, второй блок определения модуля и второй усилитель, выход которого соединен со вторым входом четвертого сумматора, к третьему входу которого подсоединен выход блока форми-15 рования уставки, выход второго сумматора соединен со входом второгодифференциатора, первым входом пятого сумматора, вторым входом третьего сумматора, и через последователь 20 но соединенные ключ и блок умножениясо входом первого усилителя, первыйвход третьего сумматора соединен совторьм входом пятого сумматора, авыход реле соединен со вторым входомключа,На чертеже представлена функциональная схема адаптивной системы регулированвход третьего дифференциатора 7. Еслисключ 18 замкнут, в противоположном случае ключ 18 разомкнут ицепь обратной связи разорвана, Навыходе третьего дифференциатора 7 вмоменты изменения знака появляются5 положительные и отрицательные импульсы, которые подаются на вход триггера 16, Отрицательные импульсы наизменение состояния триггера 16 влияния не оказывают, С выхода триггера16 сигнал поступает на вход блока 17умножения, на другой вход которого свыхода второго сумматора 9 через ключ18 подается ошибка рассогласования б,В зависимости от текущего значениязнака коэффициента усиления объектана выходе блока 17 умножения генерируется либо + С, либо - 6 Полученный сигнал через пропорционально"интегрально-дифференциальный регуля 2 О тор, образованный первым усилителем2, интегратором 4, первым дифференциатором 5 и первым сумматором 8,поступает на вход объекта 20 управления,25 У= Е- Са+Р+ао Если знак коэФфициента усиления системы совпадает со знаком коэффициента усиления объекта, то система отрабатывает ошибку регулированияустремляя ее к нулю. Если знаки коэффициепта усиления системы и объекта различны, то система становится неустойчивой и изображающая точка переходит н область у(0 . В момент перехода знак коэффициента усиления системы изменяется на противоположный, а цепь обратной связи размыкае -.ея. Поскольку объект является устсйчиньм, то изображающая точка возвращается в область 1)О , что позволяет избежать неустойчивости при случайном ненранильногл выборе знака коэффициента усиления системыв В момент перехода изображающей точки из области 0 н область о происходит повторное замыкание цепи обратной связи .Адаптивная система регулирования работает следующим образом.Сигналы, поступающие с выхода объекта 20 и задатчика 1 на вход второго сумгатора 9, формируют на его выходе ошибку рассогласования , которая поступает, на нход. второго дифФеренциатора 6, на выходе которого образуется С . Полученная пара сигналов Е и Е пропускается через дна канала, первый из которых содержит последовательно соединенные третий сумматор 10 и первый блок 14 определения модуля, а второй содержит последовательно соединенные пятый сумматор 12, второй блок 15 определения модуля и второй усилитель 3, На выходе первого канала формируется сигнал ;: - б.1, а на выходе второГо - с.,ф+ б, Эти сигналы поступают на входы четвертого сумматора 11, напоследний вход которого с блока формирования уставки поступает сигналАо. На выходе четвертого сумматора11 получается Функция Формула изобретения ратор 4, первый, второй и третий дифференциаторы 5 - 7, первый, второй, третий, четвертый и пятый сумматоры 8-12, реле 13, блоки 14 и 15 определения модуля, триггер 16, блок 17 умножения, ключ 18, блок 19 формирования уставки, объект 20 управления.Характеристикой, определяющей выбор знака коэффициента усиления системы, является местоположение изображающей точки на плоскости ( Е, 1 )Предположим,что в некоторый момент времени изображающая точка находится в области= Г-Е 1- С,М.+Й 1+д (1) Знак ее определяется посредствомреле 13. Сигнал с реле 13 поступаетна управляющий вхсд ключа 18 и на Таким образом, использование. адаптивной системы регулирования для объектов с переменным знаком коэффициента усиления обеспечивает высоко- ЗО качественное регулирование для этихобъектов,35Адаптивная система регулирования,соде ржащая первый диффе ренциа тор ипервый усилитель, выход которого через первый сумматор и через последовательно соединенные интегратор ипервый сумматор соединен со входомобъекта управления, выход которогосоелинен с первьм входом второго сумматора, второй вход которого соединен с задатчиком, о т л и ч а ю щ ая с я тем, что, с целью повышенияустойчивости системы, она содержитблок формирования уставки, ключ, последовательно соединенные второй дифФеренциатор, третий сумматор, первый 5 О блок определения модуля, четвертыйсумматор, реле, третий дифференциатор, триггер и блок умножения и последовательно соединенные пятый сумматор, второй блок определения модуляи второй усилитель, выход которогосоединен со вторым входом четвертогосумматора, к третьему входу которогоподсоединен выход блока Формированияуставки, выход второго сумматора соединен со входом второго дифференциа О тора, первым входом пятого сумматора,вторым входом третьего сумматора, ичерез последовательно соединенныеключ и блок умножения - со входомпервого усилителя, первый вход третье го сугматора соединен со вторым вхо-3 илиал ППП"Патентф, г, Ужгород, ул. Проек дом пятого сумматора, а выход релесоединен со вторым входом ключа. Источники информации,принятые во внимание при экспертизеТираж 94 КИПИ Государст по делам изоб 5, Москва, Ж1. Авторское свидетельство СССРР 578636, кл, С 05 В 11/00 19762. Гурецкий Х. Анализ и синтезсистем управления с запаздыванием.М,р 1974, с. 93 (прототип)Подписнонного комйтета СССРтений и открытийРаушская наб.
СмотретьЗаявка
2653870, 09.08.1978
ОРДЕНА ЛЕНИНА ИНСТИТУТ ПРОБЛЕМУПРАВЛЕНИЯ AH CCCP
ШУБЛАДЗЕ АЛЕКСАНДР МИХАЙЛОВИЧ, СУРГУЛАДЗЕ РЕВАЗ МИХАЙЛОВИЧ, ГУЛЯЕВ СЕРГЕЙ ВИКТОРОВИЧ, ЛАПЧЕНКО НИКОЛАЙ ПЕТРОВИЧ, ГОГИТАДЗЕ РЕВАЗ ВАЛЕРИАНОВИЧ, ЦАГУРИЯ НУГЗАР НОДАРИЕВИЧ
МПК / Метки
МПК: G05B 13/02
Метки: адаптивная
Опубликовано: 15.03.1981
Код ссылки
<a href="https://patents.su/3-813356-adaptivnaya-sistema-regulirovaniya.html" target="_blank" rel="follow" title="База патентов СССР">Адаптивная система регулирования</a>
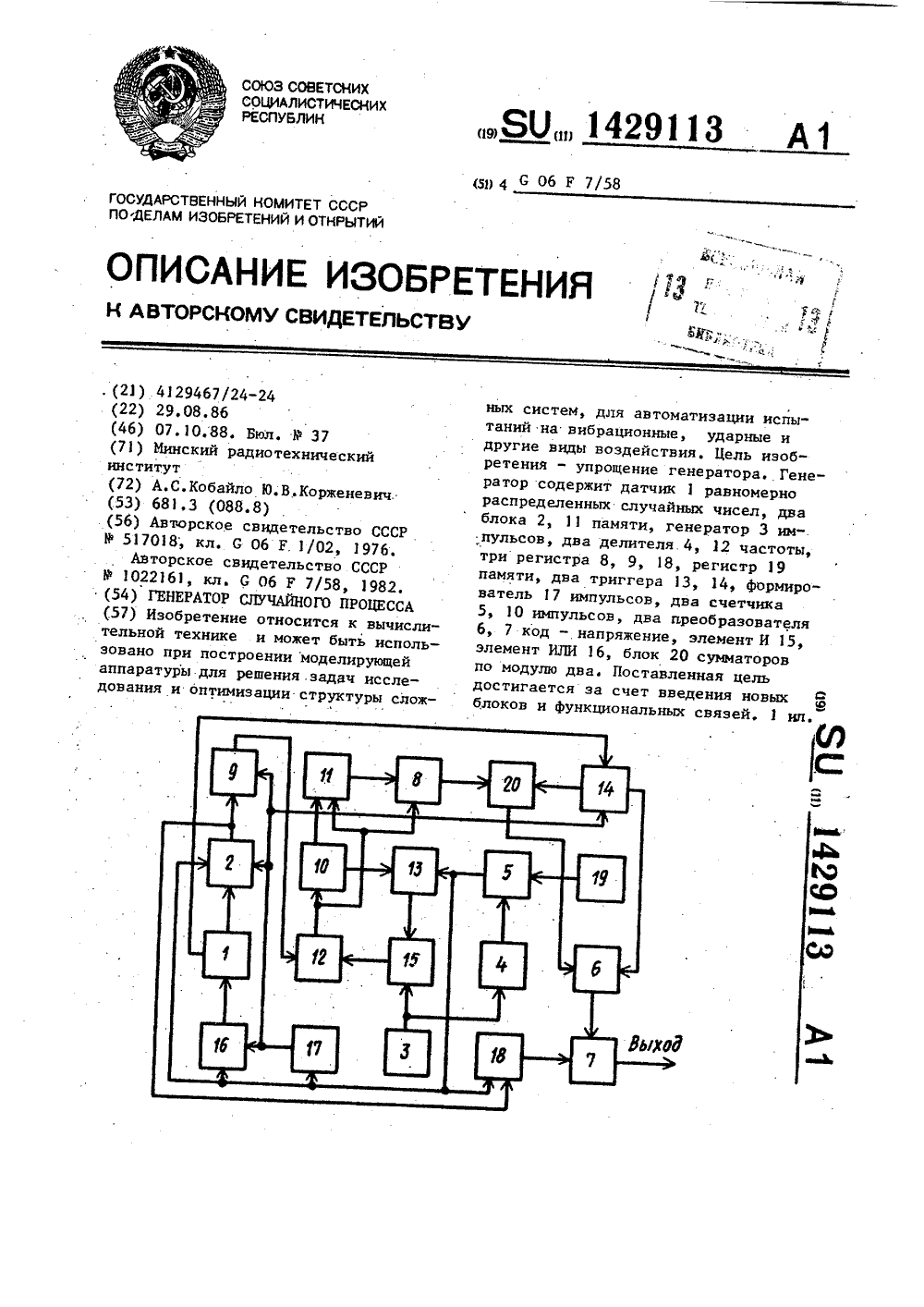
Генератор случайного процесса
Номер патента: 1429113
Опубликовано: 07.10.1988
Авторы: Кобайло, Корженевич
МПК: G06F 7/58
Метки: генератор, процесса, случайного
...коды через первый регистр 8 иблок 20 поступают поочередно на входпреобразователя 6 и на выходе устройства формируется импульс, форма которого определяется значением кодов,считываемых из блока 11 памяти,амплитуда - кодом, хранящимся в регистре 18, длительность - коэффициентом деления делителя 12 частоты,код которого хранится в регистре 9,а полярность - состояние триггера 14,В результате появления импульсана выходе переполнения счетчика 10происходит установка нулевого состояния триггера 13, вследствие чего запрещается прохождение тактовых импульсов ка вход делителя 12 часто 5 ты и формирование импульса на выходе устройства заканчивается.Далее следует формирование паузы в течение времени, равного интервалу между моментом появления...
Устройство для ввода и вывода информации

Номер патента: 1304013
Опубликовано: 15.04.1987
Авторы: Абысов, Голубчик, Сиверский
МПК: G06F 3/14
Метки: ввода, вывода, информации
...сигнала по связи 33 устанавливается триггер 5, сигнал по этой же связи (признак наличия сигнала - высокий уровень потенциала на связи) разрешает вывод метки на экран ВКУ 24 (см. элемент 9 И и связь 49) .После установки триггера 5 сигнал по связи 38. разрешает прохождение импульсов счета на счетчик 10. Пока установлены триггеры 25 и 26 идет счет5 1304 0 в счетчиках 10 и 11 и происходит вывод информации на экран ВКУ 24. Сбрасываются триггеры 25 и 26 в двух случаях. Первый случай, когда счетчик 10 досчитает до последнего символа в строке, выводимого на экран (сбрасывается триггер 25 сигналом по связи 64), и когда счетчик 11 досчитает до последней строки, выводимой на экран (сбрасывается триггер 26 сигна лом по связи 65), Второй...
Устройство для ввода информации

Номер патента: 1474631
Опубликовано: 23.04.1989
МПК: G06F 3/02
Метки: ввода, информации
...отпускании клавиш триггер 11не устанавливается и триггер 13 сбрасывается - схема занимает исходноесостояние.Стробирование дешифратора 2 сигналом тактового генератора 1 даетвозможность избежать выдачи с дешифратора 2 сигнала во время переходагервого счетчика 3 из одного состояния а другое, т.е. когда его состояние на входе дешифратора 2 не определено. Это обстоятельство обеспечива"ет строго последовательный опросклавиш и исключает возможные ситуации искажения кода при нажатии нескольких клавиш одновременно,В составе устройства отсутствуюттрадиционные элементы задержки каксредства защиты от "дребезга". Предложенные связи между элементами устройства позволяют использовать клавиши практически с любым временемдребезга и обеспечивают...
Блок переноса сумматора

Номер патента: 1695293
Опубликовано: 30.11.1991
Авторы: Коваленко, Малинин, Сомов, Щетинин
МПК: G06F 7/50
Метки: блок, переноса, сумматора
...10 тока, проходит через открытый транзистор 7 на резистор 9. При этом нэ прямом выходе 16будет уровень напряжения, соответствующий логическому нулю (Р=О), а на ин-версном выходе 17 - уровень логическоиединицы (Р=1).Если А=1, В=О или А=О, В=1, то один изтранзисторов 1 и 2 откроется, и в зависимости от значения сигнала С ток, вырабатываемый источником 1 О тока, потечет либо врезистор 8 через открытый транзистор 4(при С=1), либо.в резистор 9 через открытый транзистор 6 (при С=О). В результатена выходах 16 и 17 устанавливаются значения Р=1, Р=О при С=1 или Р=О, Р=1 приС-О.Если А=1 и В=1, то транзисторы 1, 2, 3 и5 откроются, и независимо от значения сигнала С ток с источника 10 тока потечет через резистор 8. При этом на выходах 16 и 17...
Параллельный сумматор с контролем по четности

Номер патента: 1124283
Опубликовано: 15.11.1984
МПК: G06F 11/10, G06F 7/50
Метки: контролем, параллельный, сумматор, четности
...по седьмой группы соединены со входами. первого элементаИЛИ, выходы элементов И с восьмогопо одиннадцатый группы соединенысо входами второго элемента ИЛИ,первые входы одноименных элементовИ-НЕ группы и элементов ИЛИ-НЕ группы объединены и соединены со входами соответствуюиих разрядов первого слагаемого сумматора, вторыевходы одноименных элементов И-НЕгруппы и элементов ИЛИ-НЕ группы1 О Параллельный сумматор с контролем по четности (фиг, 1) содержит блок 1 формирования функций переноса, блок 2 формирования параллельных .переносов, блок 3 формирования разрядных полусумм, блок 4 формирования разрядных сумм, блок 5 формирования дублирующего выходного переноса, сумматор 6 по модулю два контроля выходного переноса, блок 7 формирования...
Предыдущий патент: Цифровой измеритель экстремумов
Следующий патент: Многоканальный непрерывно-шаговыйэкстремальный регулятор
Случайный патент: Устройство для измерения колебаний магнитной ленты