Привод рабочего движения технологического ротора
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки


Текст
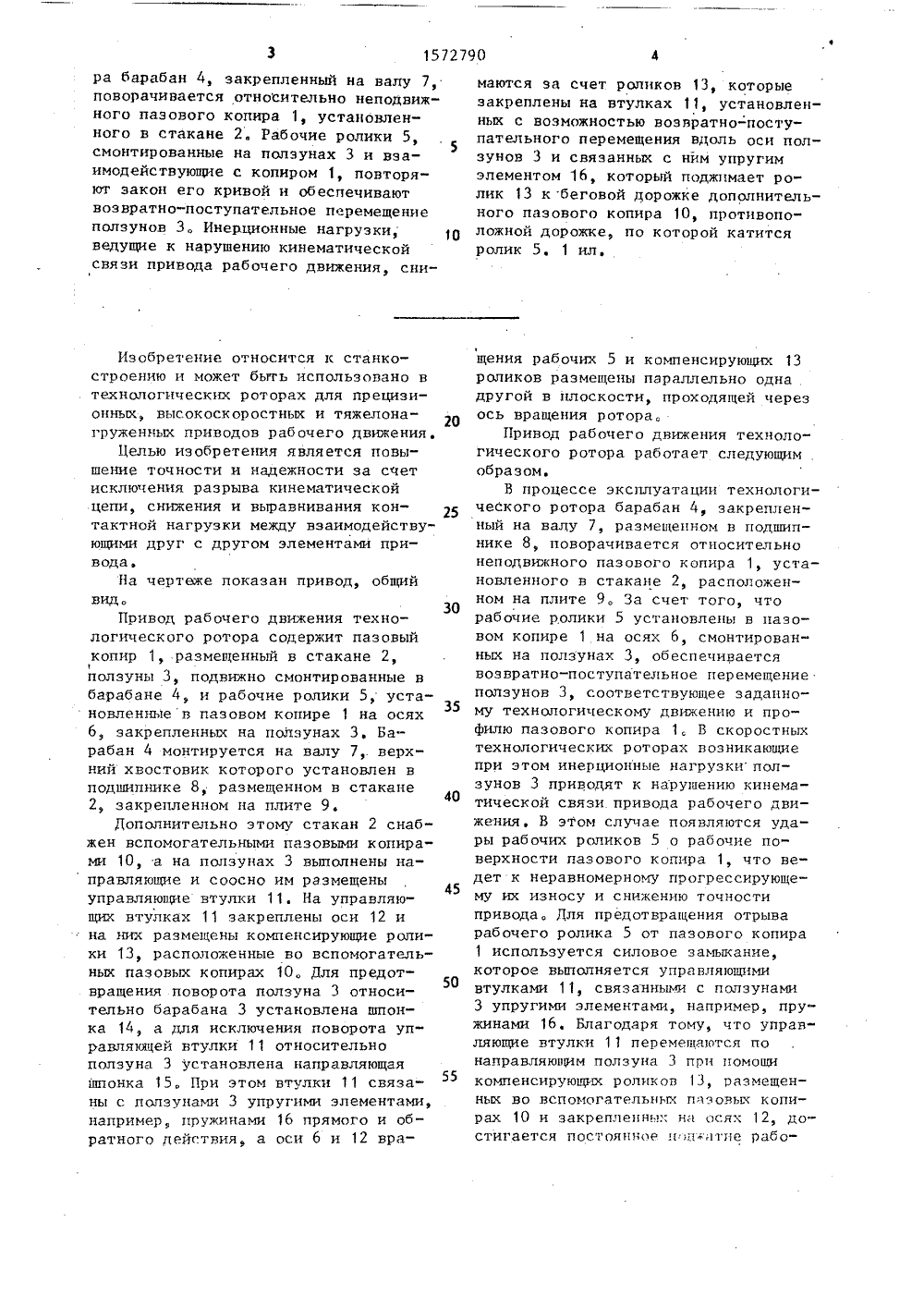
(51)5 В 23 39 ГОСУДАРСТВЕННЫЙ КОМИТЕТПО ИЗОБРЕТЕНИЯМ И ОТНРЫТИЯМПРИ ГКНТ СССР ИЗОБРЕТЕНИЯЩТ 5 ЛЬСТВУ 23 укторскнй техно- Всесоюзного прония Союзуглемаша .А.Финиченко автомароторных1972,ексная на базтроение ОПИСАНИЕ К АВТОРСКОМУ СВ(56) Кошкин Л,Н, Котизация производствлиний. - М.: Машиносс. 32, рис. 23,(54) ПРИВОД РАБОЧЕГО ДВИЖЕНИЯ ТЕХНОЛОГИЧЕСКОГО РОТОРА(57) Изобретение относится к станкостроению и может быть использовано втехнологических роторах лля высокоскоростных и тяжелонагруженных приводов рабочего движения. Цель изобретения -повышение надежности и точности работы за счет исключения разрыва кинематической цепи, снижения ивыравнивания контактной нагрузки между взаимодействующими друг с другомэлементами привода. При работе рото1572790 10 ра барабан 4, закрепленный на валу 7, поворачивается относительно неподвижного пазового копира 1, установленного в стакане 2. Рабочие ролики 51 смонтированные на попэунах 3 и взаимодействующие с копиром 1, повторяют закон его кривой и обеспечивают возвратно-поступательное перемещение ползунов 3. Инерционные нагрузки, ведущие к нарушению кинематической связи привода рабочего движения, сниИзобретение относится к станкостроению и может быть использовано в технологических роторах для прецизионных, высокоскоростных и тяжелонагруженных приводов рабочего движения.Целью изобретения является повышение точности и надежности за счет исключения разрыва кинематической цепи, снижения и выравнивания контактной нагрузки между взаимодействующими друг с другом элементами привода.На чертеже показан привод, общий Вид оПривод рабочего движения технологического ротора содержит пазовый копир 1, .размещенный в стакане 2,ползуны 3, подвижно смонтированные в барабане 4, и рабочие ролики 5, установленные в пазовом копире 1 на осях 6, закрепленных на ползунах 3, Барабан 4 монтируется на валу 7, верхний хвостовик которого установлен в подшипнике 8, размещенном в стакане 2, закрепленном на плите 9.Дополнительно этому стакан 2 снабжен вспомогательными пазовыми копирами 10, а на ползунах 3 выполнены направляющие и соосно им размещены управляющие втулки 1 1. На управляющих втулках 11 закреплены оси 12 и на них размещены компенсирующие ролики 13, расположенные во вспомогательных пазовых копирах 10, Для предотвращения поворота ползуна 3 относительно барабана 3 установлена шпонка 14, а для исключения поворота управляющей втулки 11 относительно ползуна 3 установлена направляющая шпонка 15. При этом втулки 11 связаны с ползунами 3 упругими элементами, например, пружинами 16 прямого и обратного действия, а оси 6 и 12 вра 20 25 30 35 40 45 50 55 маются эа счет роликов 13, которыезакреплены на втулках 11, установленных с возможностью возвратно-поступательного перемещения вдоль оси ползунов 3 и связанных с нйм упругимэлементом 16, который поджимает ролик 13 к беговой дорожке дополнительного пазового копира 10, противоположной дорожке, по которой катитсяролик 5. 1 ил,1щения рабочих 5 и компенсирующих 13 роликов размещены параллельно одна другой в плоскости, проходящей через ось вращения ротора.Привод рабочего движения технологического ротора работает следующим . образом.В процессе эксплуатации технологичеСкого ротора барабан 4, закрепленный на валу 7, размещенном в подшипнике 8, поворачивается относительно неподвижного пазового копира 1, установленного в стакане 2, расположенном на плите 9. За счет того, что рабочие ролики 5 установлены в пазовом копире 1 на осях 6, смонтированных на ползунах 3, обеспечивается возвратно-поступательное перемещение ползунов 3, соответствующее заданному технологическому движению и профилю пазового копира 1, В скоростных технологических роторах возникающие при этом инерционные нагрузкиползунов 3 приводят к нарушению кинематической связи привода рабочего движения, В этом случае появляются удары рабочих роликов 5 о рабочие поверхности пазового копира 1, что ведет к неравномерному прогрессирующему их износу и снижению точности привода. Для предотвращения отрыва рабочего ролика 5 от пазового копира 1 используется силовое замыкание, которое выполняется управляющими втулками 11, связанными с ползунами 3 упругими элементами, например, пружинами 16, Благодаря тому, что управляющие втулки 11 перемешаются по направляющим ползуна 3 при помощи компенсирующих роликов 13, размещенных во вспомогательных пазовьг копирах 10 и закрепленных н осях 12, достигается постоянное и"и тие рабоТираж 667 Заказ 1610 Подписное ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж, Раушская наб., д. 4/5Производственно-издательский комбинат "Патент", г,ужгород, ул. Гагарина,101 5 157 чих роликов 5 к пазовому копиру 1, Здесь направляющие шпонки 14 и 5 исключат проворот палэунов 3 и управляющих втулок 11 относительно барабана 4. В этом случае силовое замыкание предотвращает отрывы рабочего ролика 5 от пазового копира 1, что обеспечивает непрерывную кинематическую связь элементов привода. Однако при этом контактное давление между рабочим роликом 5 и пазовым копиром 1 зависит от их углового положения, так как инерционная и технологическая нагрузка, действующая на каждый ползун 3, изменяется в зависимости от углового положения, ротораДля исключения разрыва кинематической цели, снижения и выравнивания контактной нагрузки между рабочими роликами 5 и пазовым копиром 1 вспомогательные пазовые копиры 10 имеют продриль, представляющий собой огибающую цилиндра, образованную при движении его оси вокруг продольной оси стакана 2, При движении компенсирующих роликов 13 по таким вспомогательным пазовым копирам 10 управляющие втулки 11 через упругие элементы 16 непрерывно обеспечивают постоянство контактного давления между рабочими роликами 5 и пазовым копиром 1. С увеличением числа вспомогательных пазовых копиров 10 нагрузка, действующая на рабочий ролик 5, снижается и перераспределяется на компенсирующие ролики 13, Количество вспомогательных пазовых копиров определяется геометрическими особенностями ротора и всегда выполняется не менее одного. Формула изобретенияПривод рабочего движения технологического ротора, содержащий закрепленный в стакане пазовый копир иполэуны, установленные равномерно поокружности барабана с возможностьювозвратно-поступательного перемещения посредством рабочих роликов, размещенных в пазу копира, о т л и ч а"ю щ и й с я тем, что, с целью повышения надежности и точности работы,привод снабжен по меньшей мере од ним дополнительным пазовым копиром,втулками, дополнительными роликами иупругими элементами, при этом дополнительные копир и ролики закрепленысоответственно в упомянутом стакане 25 и на втулках, а каждая втулка установлена на полэунес возможностьювозвратно-поступательного перемещения вдоль его оси и связан с ползуном посредством упругого элемента,причем дополнительные ролики размещены в пазу дополнительного копира, аоси вращения основного и дополнительного роликов параллельны одна другойи расположены в плоскости, проходящей через ось вращения ротора
СмотретьЗаявка
4460229, 10.06.1988
ПРОЕКТНО-КОНСТРУКТОРСКИЙ ТЕХНОЛОГИЧЕСКИЙ ИНСТИТУТ ВСЕСОЮЗНОГО ПРОМЫШЛЕННОГО ОБЪЕДИНЕНИЯ СОЮЗУГЛЕМАША
МИХАЙЛОВ АЛЕКСАНДР НИКОЛАЕВИЧ, ФИНИЧЕНКО ВЛАДИСЛАВ АЛЕКСАНДРОВИЧ, ГЕРАСИМОВ ГУРИЙ ПАВЛОВИЧ
МПК / Метки
МПК: B23Q 39/02
Метки: движения, привод, рабочего, ротора, технологического
Опубликовано: 23.06.1990
Код ссылки
<a href="https://patents.su/3-1572790-privod-rabochego-dvizheniya-tekhnologicheskogo-rotora.html" target="_blank" rel="follow" title="База патентов СССР">Привод рабочего движения технологического ротора</a>
Сепаратор рабочей клети стана холодной прокатки труб роликами

Номер патента: 417196
Опубликовано: 28.02.1974
Авторы: Беликов, Король, Кучерский, Никопольский, Палеев, Удачин, Хаустов
МПК: B21B 21/00
Метки: клети, прокатки, рабочей, роликами, сепаратор, стана, труб, холодной
...Вкладыши 3 рабочих роликов выполнены несимметричными относительно линии центров рабочих роликов и снабжены возвращающими их в исходное рабочее положение упругими элементами в 5 виде пружин 7.Работает сепаратор следующим образом.При движении сепаратора вправо (фиг. )вкладыши 3 упираются в стенку окна 2 и перемещают рабочие ролики 6 относительно не подвижной заготовки 8, осуществляя ее деформацию. Вертикальное усилие прокатки воспринимается неподвижной станиной 9 через опорные ролики 5, планки 10 и клинья 11,При обратном ходе сепаратора (фиг. 2) 15 корпус 1 вместе с опорными роликами 5 перемещается на некоторую величину Л, сжимая пружину 7, так как рабочие ролики 6 под действием давления со стороны заготовки некоторое Время...
Рабочая клеть стана холодной прокатки труб роликами

Номер патента: 1127651
Опубликовано: 07.12.1984
Авторы: Жаниспаев, Куфтин, Морозов, Педас, Попов, Пришвицын, Раушенбах, Фомин
МПК: B21B 13/18
Метки: клеть, прокатки, рабочая, роликами, стана, труб, холодной
...перемещения, размещенные в нем калиброванные планки и сепаратор с установленными во вкладышах роликами, опирающимися цапфами на калиброванные планки, снабжена подпружиненной втулкой, установленной в корпусе соосно сепаратору и в контакте с его торцом при расположении роликов в заходной части калиброванных планок, и амортизатором, размещенным в станине соосно сепаратору в контакте с другим его торцом в том же положении роликов.Такая конструкция клети позволяет улучшить настройку катающих радиусов и тем самым способствует повышению качества труб и снижению отходов.На фиг. 1 показана предлагаемая клеть при расположении роликов в заходной части калиброванных планок, продольный разрез; на фиг. 2 - разрез А-А на фиг. 1; на...
Рабочая клеть стана холодной прокатки труб роликами

Номер патента: 465237
Опубликовано: 30.03.1975
Авторы: Гребеник, Жицкий, Кучеренко, Малкин, Сенкевич, Сенчин, Цапко
МПК: B21B 13/18
Метки: клеть, прокатки, рабочая, роликами, стана, труб, холодной
...калиброванными планками и взаимодействующих с ними рабочих роликов.К недостаткам известных станов следует отнести необходимость в возвратно-поступательном движении заготовки и связанного с ней поворотно-подающего механизма. Это приводит к возникновению инерционных нагрузок в узлах стана и исключает возможность использования неподвижных поворот- но-подающих механизмов.С целью снижения инерционных нагрузок, рабочие ролики через подпружиненные кронштейны шарнирно связаны с валами приводных дисков.На фиг. 1 представлена предлагаемая клеть в разрезе, вид спереди; на фиг, 2 - вид одного из трех дисков, вид сбоку.Рабочая клеть стана холодной прокатки труб роликами состоит из неподвижной станины 1, трех приводных дисков 2 с установленными на...
Шовообжимной ролик

Номер патента: 940889
Опубликовано: 07.07.1982
Авторы: Беляков, Бибик, Иванов, Никитин, Сидоркевич
МПК: B21C 37/12
Метки: ролик, шовообжимной
...износа рабочей поверхности ролика и тем самым улучшить качество сварного шва и сократить брак. Это достигается за счет того, что ту часть ролика, которая более интенсивно изнашивается, собирают из более твердых колец. Твердость колец выбирают таким образом, чтобы при работе ролика достигался равномерный износ по всей его рабочей поверхности. Кроме того, за счет электрической изоляции,колец исключается прохождение электрического тока, подаваемого к кромкам полосы для их нагрева, через шовообжимные ролики и тем самым исключается искрение между роликами и кромками полосы. Этим достигается уменьшение электроэррозионного износа рабочей поверхности ролика, уменышение налипания металла кромок полосы на ролик и тем самым улучшение качества шва и...
Упругая передача движения к ведущей оси от двигателя внутреннего горения в автомотрисах и т. п.

Номер патента: 4455
Опубликовано: 31.01.1928
Автор: Гейгер
Метки: автомотрисах, ведущей, внутреннего, горения, двигателя, движения, оси, передача, упругая
...колесо привода наса жено свободно на шаровую цапфу и соединено с ведущей осью упругим образом при помощи поводка. Благодаря такому устройству, ведущая ось при возникновении толчков и сотрясений выполняет, так сказать, маятниковые качания в зубчатом колесе, тогда как последнее остается в равномерном сцеплении с соответствующей зубчаткой. Упругий поводок обеспечивает при этом спокойную, плавную передачу рабочего усилия на ведущую ось повозки,На фиг. 1 чертежа изображено схематически общее устройство в плане; на фиг. 2 - разрез по А - В фиг. 1 с целью показать, каким образом упруго поддерживаетсям коробка передачи на ведущеи оси; на фиг, 3 - устройство зубчатого колеса на ведущей оси в вертикальном разрезе; на фиг. 4 - разрез по С - О фиг....
Предыдущий патент: Устройство для диагностики режущего инструмента
Следующий патент: Рабочий ротор
Случайный патент: Устройство для автоматического управления перемещениями рабочего электрода в электроимпульсных установках