Самонастраивающаяся система управления
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
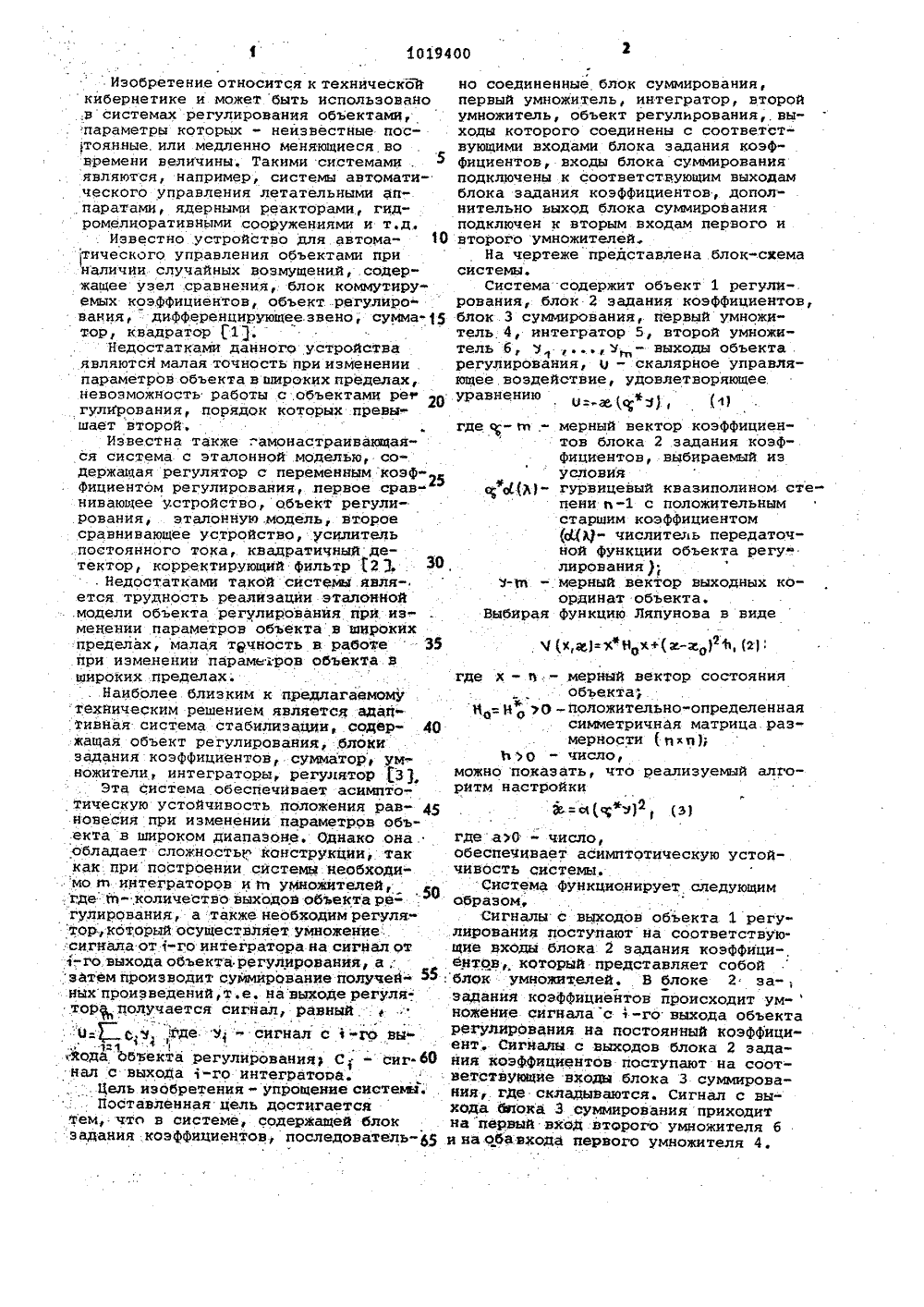
09) (11) ОЮЗ СОВЕТСНИХ ЦИАЛИСТИЧЕСКИХСПУБЛИН 3 Щ 05 В 13 ОБРЕТ юл. Р 19 А.П.Крывчак Ф ГОСУДАРСТВЕННЫЙ КОМИТЕТ СССР(53) 62-50 1088,8)56) 1. Авторское свидетельство СССР В 378803,.кл, С, 05 В 13/02, 1973.2. Авторское свидетельство СССР Р 327448, кл. С 05. В 13/02, 1972.3. Фрадков А.Л.Синтез адаптивной системыстабилизации линейног, динами ческого объекта.-"Автоматика и телемеханикаф, 1974; М 12, с.,98 прототип ).(54) 157) сАмонАстрАИВАющрлся системАУПРАВЛЕНИ, содержащая блок задания )коэффициентов, последовательно.соединенные блок суммирования, первыйкоторого соединены с соответствующими входами блока задания коэффициентов, входы блока суммирования под"ключены к соответствующим выходамблока задания коэффициентов, о т л ич а ю щ а я с я тем, что, с цельюупрощения системы, выход блока суммирования подключен к вторым входампервого и второго умножителей, 1019400 2Изобретение относится к техническоЪкибернетике и может быть использовано ,в системах регулирования объектами, :параметры которых - неизвестные пос)тоянные.или медленно меняющиеся вовремени величины. Такими системами .являются, например, системы автоматического управления летательными аппаратами, ядерными реакторами, гид"ромелиоративными сооружениями и т.д.Известно .устройство для автома тического. управления объектами при наличии случайных возмущений, содер" жащее узел .сравнения,. блок коммутиру емых коэффициентов, объект регулирования, дифференцирующее.звена, сумма тор, квадратар Г 13Недостатками данного устройства являютсй малая точность при изменении, параметров объекта в широких пределах, невозможность работы с .объектами ре 20 гулИрования, порядок которых превышает второй.Известна также -. амонастраивающаяся система с эталонной моделью, содержащая регулятор с переменным коэффициентом регулирования, первое сравнивающее устройство, объект регулирования, эталонную .модель, второе сравнивающее устройство, усилитель .постоянного тока, квадратичный детектор, корректирующий Фильтр 2 3 З 0. Недостатками такой системы является трудность реализации эталонной модели объекта регулирования при.из-. менении параметров объекта в широких пределах, малая трчность в работе 35 при изменении парамеров объекта в широких пределах.. Наиболее близким к предлагаемому техническим решением является адацтивная система стабилизации, содер жащая объект регулирования, .блоки задания коэффициентов, сумматор, умножители, интеграторы, регулятор 3),Эта система обеспечивает асимпто" тическую устойчивость положения рав 45 новесия при изменении параметров объ.екта в широком диапазоне. Однако она обладает сложностью конструкции, так как припостроении системы необходи. мо т интеграторов и п умножителей, где в-,количества выходов объекта регулирования, а также необходим регуля.- тор.,который осуществляет. умножение. : сигнала от 1-го интегратора на сигнал ат 1-.го выхода объекта регулирования, а; .затем производит суймирование получей" 55 ныхпроизведений, т.е. на выходе регуляторуполучается сигнал, равньФ О: бЪ,.где Ъ - сигнал с 1-го выхода обсекта регулированиями С; - сиг нал с выхода 1-го интегратора.Цель изобретения - Упрощение систевы.Поставленная цель достигается тем, что в системе, содержащей блок задания коэффициентов, последователь"А 5 но соединенные блок суммирования, первый умножитель, интегратор, второй умножитель, объект регулирования,. выходы которого соединены с соответствующими входами блока задания коэффициентов, входы блока суммирования подключены к соответствующим выходам блока задания коэффициентов, дополнительно выход блока суммирования подключен к вторым входам первого и второго умножителей.На чертеже представлена блок-схема системы.Система содержит объект 1 регулирования, .блок 2 задания коэффициентов, блок 3 суммирования, первый умножитель. 4, интегратор 5, второй умножитель б,, - выходи объекта регулирования, м - скалярное управляющее воздействие, удовлетворяющее. уравнению+где с- о - мерный вектор коэффициентов блока 2 задания коэффициентов, выбираемый изусловияо(Ъ) гурвицевый квазиполином степени ис положительнымстаршим коэффициентом(сЦЦ- числитель передаточной функции объекта регу.лирования);-Ф -.мерный вектор выходных координат объекта.Выбирая функцию Ляпунова в виде Ч (х,а)=х Н х+(х- ) , 2)где х - и: - мерный вектор состоянияобъекта;.и :Н" ъО в .положительно-определеннаяа- осимметричная матрица размерности (пкпн- число,можно показать, что реализуемый алгоритм настройкиа.: м +)2, (з)где а 0 - число,Обеспечивает асимптотическую устойчивость системы.Система Функционирует следующимабразом,Сигналы с вцходов объекта 1 регулирования поступают на соответствующие входы блока 2 задания коэффйциентов,. который представляет собойблок умножителей. В блоке 2 за-,задания коэффицнейтов происходит ум-ножение сигнала с т -го выхода объектарегулирования на постоянный коэффициент. Сигналы с выходов блока 2 задания коэффициентов поступают на соответствуЮщие входы блока 3 суммирования, где складываются. Сигнал с выхода блока 3 суммирования приходитнапервый вхоД второго умножителя би на аба.входа первого умнажителя 4.1019400 Й первом умножителе 4 происходит умножение сигнала с выхода блока 3суммирования на. этот же сигнал. Сигнал с выхода первого умножителя 4поступает на вход интегратора 5, гдеинтегрируется. Сигнал с выхода интег-..ратора 5 поступает йа второй входвторого умножнтеля б. Во втором уме,ножителе 6 происходит. умножение сигнала.с выхода блока Э .суммирования. 4на сигнал с выхода интегратора 5; Сигнал с выхода второго уиножнтеля 6 управляющее воздействие ) ноступар ет на вход объекта 1 регулирования.Таким образом, предлагаемое подключение выхода блока суммирования позволяет обеспечить:асимптотическую устойчивость при сущеотвенноМ упро".щении системы, Составитель В.ХузинРедактор С.Патрущева Техред И.Гайду КорректорВ.ВутягаеееетФе е Мае ее е е е еее ееее е е е еЗаказ 3701/41 . Тираж 874 ПодписноеВНИИПИ Государственного комитета СССРПо делам изобретений и открытий113035 Москва, Ж-.35, Раущская наб., д.4,/5е е е е еЬ е ее ее еетФилиал ППП "Патент", г.ужгород, ул.Проектная,4
СмотретьЗаявка
3398459, 19.02.1982
ФРУНЗЕНСКИЙ ПОЛИТЕХНИЧЕСКИЙ ИНСТИТУТ
ЕРЕМИН ЕВГЕНИЙ ЛЕОНИДОВИЧ, КРЫВЧАК АЛЕКСАНДР ПАВЛОВИЧ, ЦЫКУНОВ АЛЕКСАНДР МИХАЙЛОВИЧ
МПК / Метки
МПК: G05B 13/02
Метки: самонастраивающаяся
Опубликовано: 23.05.1983
Код ссылки
<a href="https://patents.su/3-1019400-samonastraivayushhayasya-sistema-upravleniya.html" target="_blank" rel="follow" title="База патентов СССР">Самонастраивающаяся система управления</a>
Способ измерения коэффициентов рассеяния лазерного излучения подвижным рассеивающим объектом в заданном телесном угле

Номер патента: 1124686
Опубликовано: 07.09.1986
Автор: Хайкин
МПК: G01J 5/50
Метки: заданном, излучения, коэффициентов, лазерного, объектом, подвижным, рассеивающим, рассеяния, телесном, угле
...в заданном телесном угле с гетеродинным и измеряют амплитуду биений смешанного излуче-, ния Чщ, смешивают эталонное излуЧение с гетеродинным и измеряют амплитуду биений смешанного излучения 7 и определяют значение коэффициента рассеяния К в заданном телес 2Рэт оь ном угле по Формуле К =Рп 1 эт а значение размерного коэффициента рассеяния по максимуму спектральной плотности М определеяют по формуле На чертеже изображена функциональная схема устройства для осуществления способа.Устройство содержит лазерное излучение 1, формирователь 2 опорного излучения 3 и эталонного излучения 4, подвижный рассеивающий объект 5, калориметрический измеритель 6 мощности опорного излучения, гетеродинное излучение 7, сформированное из опорного...
Адаптивная система управления объектами, подверженными координатным и параметрическим возмущениям

Номер патента: 1663602
Опубликовано: 15.07.1991
Авторы: Авдеев, Буторин, Катунин, Киселев, Кошелев, Мышляев, Оржех, Репин
МПК: G05B 13/02
Метки: адаптивная, возмущениям, координатным, объектами, параметрическим, подверженными
...и третьего 26 блоков сравнения, На вторые уг 1 равляющие входы третьего 45, второго 38 и первого 32 ограничителей поступают сигналы о граничной величине глубины погружения электродов 01 (т), 02 (т), 03 (х) с выходов соответственно шестого 42, пятого 36 и четвертого 30 блоков сравнения. На выходах третьего 45, второго 38 и первого 32 ограничителей формируются сигналы 01 (т), 02 (1), ОЗ (т), являющиеся выходными сигналами ограничивающего блока. Третий ограничитель 45 функционирует в соответствии с алгоритмом О 1 р (1) при О (1)О 1 р (1) 5 О 1 (1)О 1 (1) при О 1 (1) ) О 1 р (1); Аналогично функционируют второй 38 и первый 32 ограничители. Величины ограниЧЕНИй 01 ф"кс(1), 02"кс(т) И ОЗ"кс(1) На ВЫСОту подъема соответствующих электродов...
Способ формирования управляющего сигнала в системах автоматического регулирования
Номер патента: 650052
Опубликовано: 28.02.1979
Авторы: Гришин, Ловцов, Марцинкевич, Содонский, Фролова
МПК: G05B 11/01
Метки: сигнала, системах, управляющего, формирования
...о том, что фактическое, существующее на данньш момент, управл 511 о шее воздействие велико, то станет очевидным и ответ на поставленный вопрос; на нисходящей ветви командного сигнала не следует осуществлять слежения за самой величиной командного сигнала, а необхо димо вести слежение за его скоростью.Поэтому смесцепне командного сигналав интервале 111, на величину накопившесося рассогласования Л (1) между требуемым б(1) и фактическим рулем й(1):ь(,) ==",.Ю - "Р)обеспечит нужное движение руля - умешшаюшее управляющее воздействие, т. е.как раз требуемое слежение за скоростью 20 командного сигнала.На фиг. 2 показана реакция следящейсистемы привода при таком смещении.Смещенньссс командный сигнал обознасесс ц омПрп таком управлении приводом...
Блок формирования тригонометрических коэффициентов для процессора дискретного преобразования фурье

Номер патента: 1072056
Опубликовано: 07.02.1984
Авторы: Звягинцев, Павлусь, Шевченко
МПК: G06F 17/14
Метки: блок, дискретного, коэффициентов, преобразования, процессора, тригонометрических, формирования, фурье
...входу формирователя приращений адреса, выход которого подключен к информационному входу регистра адреса, тактовый вход счетчика итераций соединен с выходом последнего разряда счетчика циклов, информационный выход которого подключен к второму входу формирователя приращений адреса, причем тактовый вход счетчика циклов является первым тактовым входом блока, тактовые входы первого и второго узлов постоянной памяти объединены и являются вторым тактовым входом блока, содержит формирователь дополнительного кода, шесть элементов И и три элемента ИЛИ, инверсный выход стар щего разряДа регистра адреса соединен с первыми входами первого, второго и третьего элементов И, прямой выход старшего разряда, регистра адреса подключен к первы 3 входам...
Система идентификации параметров объекта
Номер патента: 1156001
Опубликовано: 15.05.1985
Авторы: Андреев, Балонин, Попов, Сироткин, Усов
МПК: G05B 13/02
Метки: идентификации, объекта, параметров
...магистрали данных.л, л Фяовые оценки параметров а ,ад,о,вырабатываемые микро-ЭВМ 16, и 16,преобразуются иэ цифровой формы .в аналоговую при помощи цифроаналоговых преобразователей 17.Алгоритмы параметрической идентификации на основе метода наименьаихквадратов, дающего систему линейныхалгебраических уравнений относительнооцениваемым параметров, в общей вндвприведены в (3), а методы рещениялинейных уравнений, в том числе и вырожденных, изложены в (4). Расчетные .формулы, к которым сводятся эти методы при реализации их на микро-ЭВИ,приведены далее,Блок памяти 8 состоит из электрон-ных устройств выборки и запоминани.аналоговых сигналов 21, которые могут быть выполнены на базе операционных усилителей, например И 4 ОУД 7Система работает...
Предыдущий патент: Цифровое управляющее устройство (его варианты)
Следующий патент: Устройство для управления транспортными средствами
Случайный патент: 360784