Способ формирования управляющего сигнала в системах автоматического регулирования
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Номер патента: 650052
Авторы: Гришин, Ловцов, Марцинкевич, Содонский, Фролова
Текст
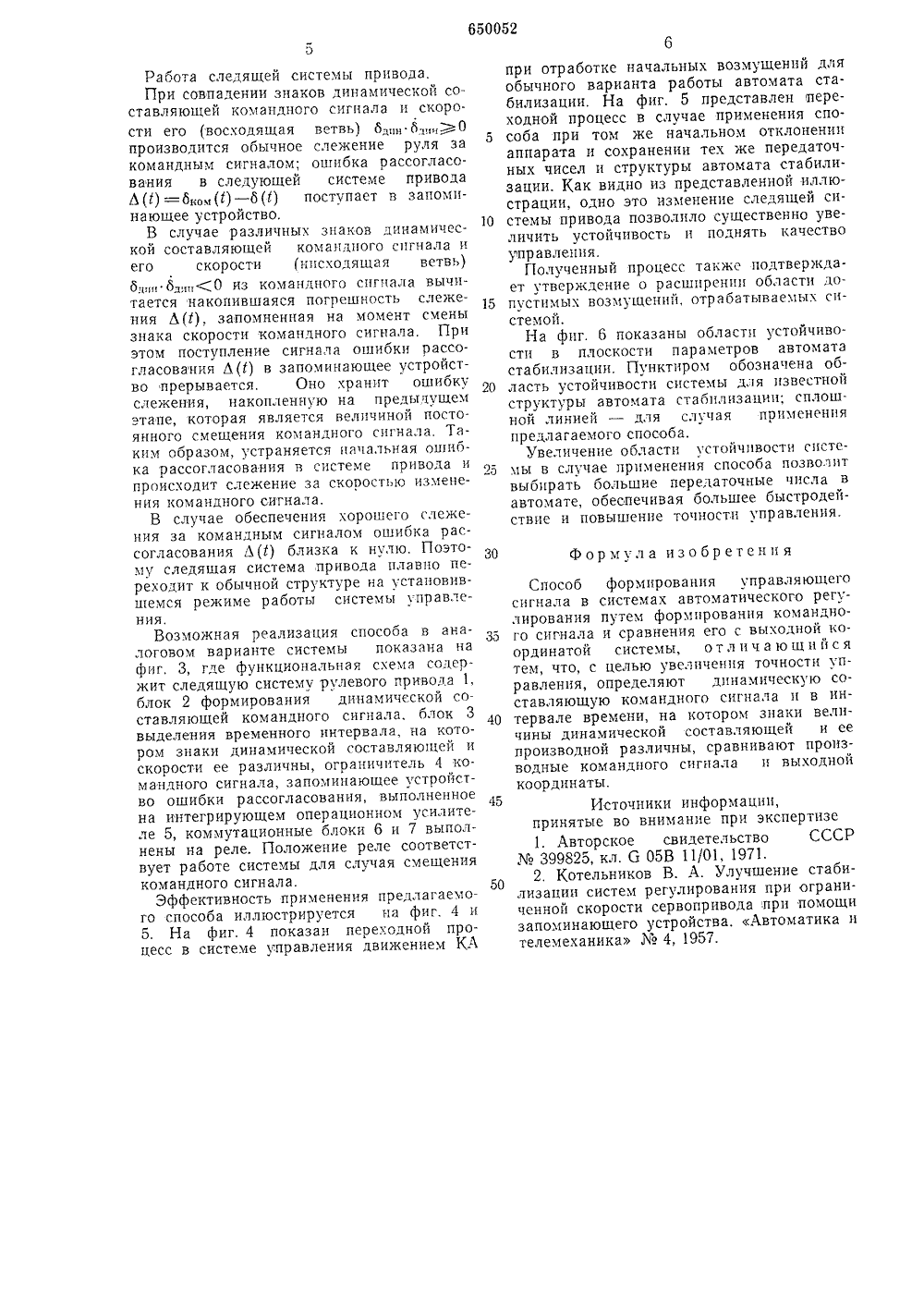
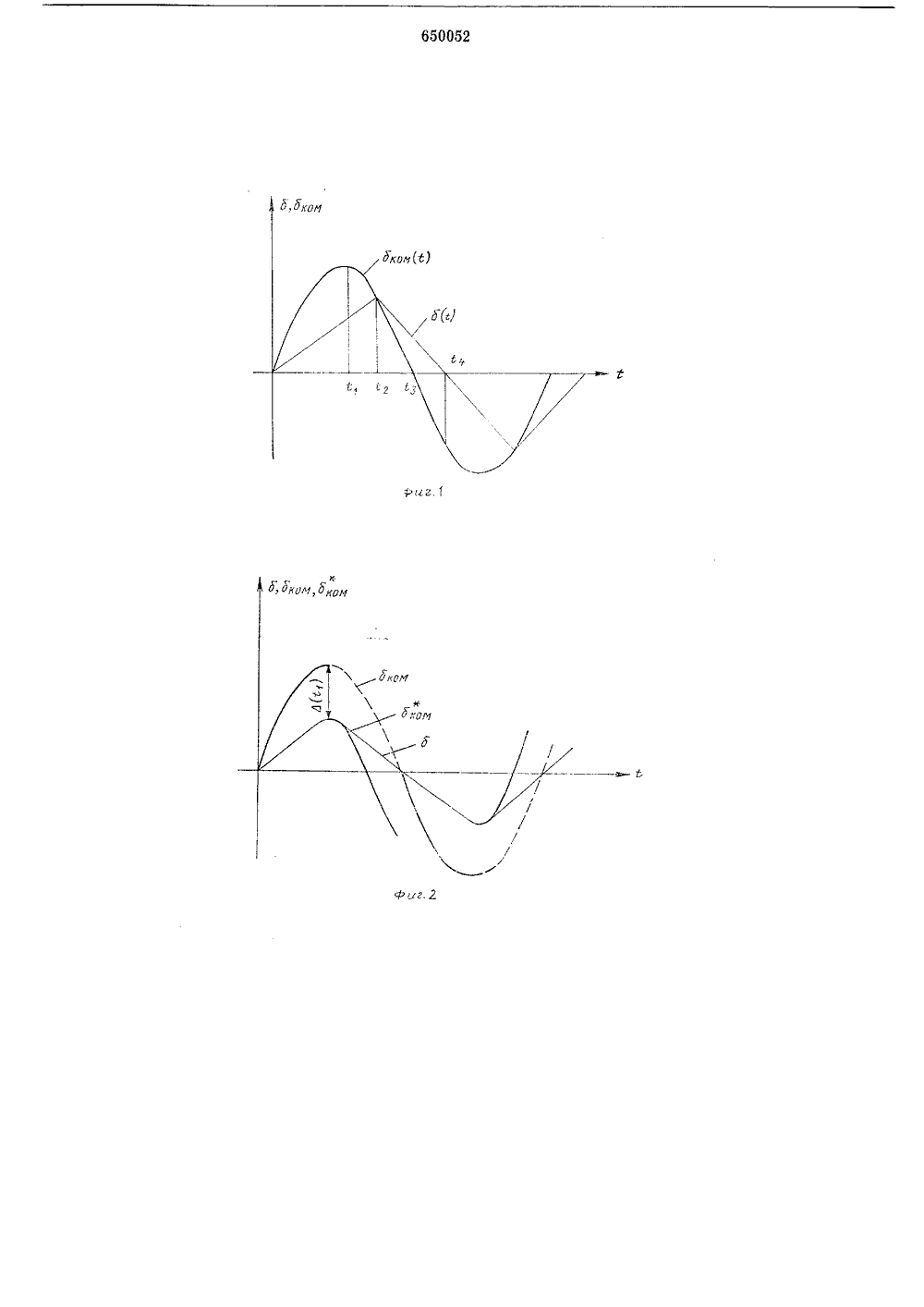
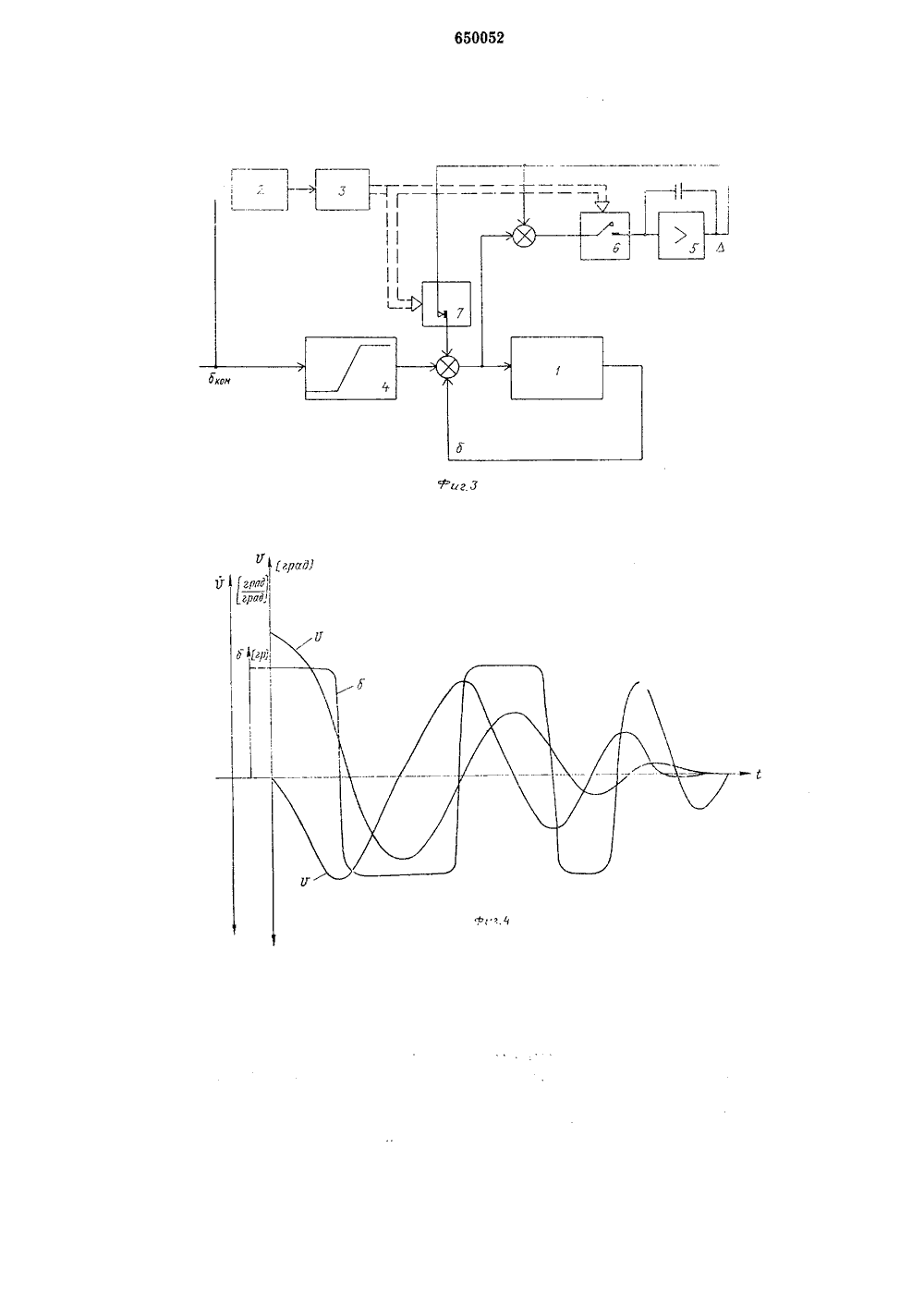
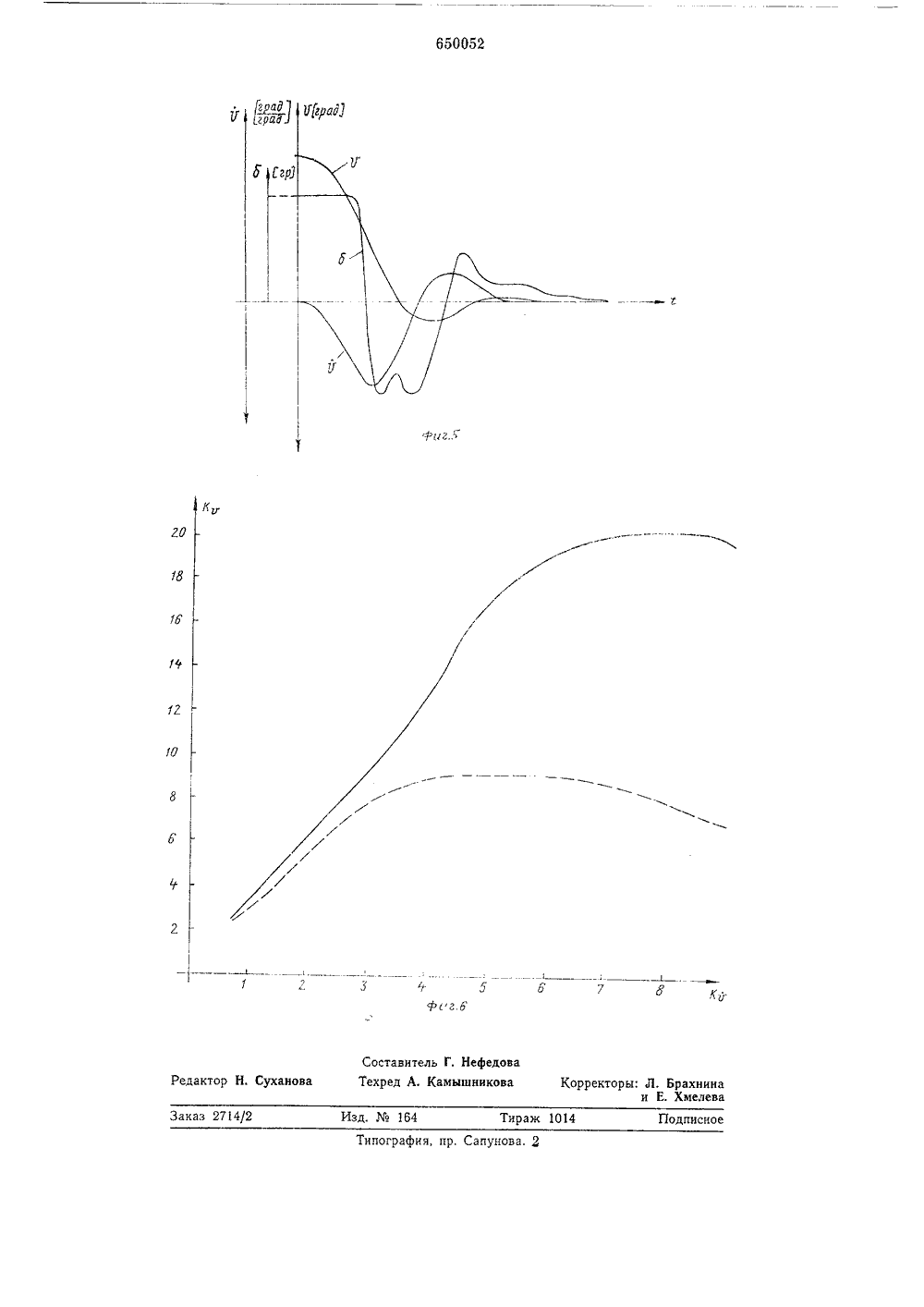
п 1165 ОО 52 Ооаэ Свввтсви Социалистичееких Республик(45) Дата опубликования описания 28.02.79Ловцов, Т. В и А. П. Ф Марцинкевич, В. А. Садонскииолова Заявитель 54) СПОСОБ ФОРМИРОВАНИЯ УПРАВЛЯЮЩЕГО СИГНАЛА В СИСТЕМАХ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ2 фактической реакции еле привода. Тем самым любо тических характеристик мер, снижение максималь отразится на фор мирова сигнала и тогда поставле высить устойчивость при ствиях в . становится не ность системы снижается.14 аиболсс близким к из ется способ формировант сигнала 2 путем форми ного сигнала и сравнения коордииатои системы. дящеи систем ье изменение факпривода (наприои скорости) нении командногозная цель - побольших воздейдостижимой. Точ 5 0 обретению являя управляющего рования командего с выходной Недостатки наличие пара стеме, низкое чичсских вхо ая то знось мости уг 1 равл ствий в систс мер, от са фактической 25 рактсристик рассогласова ность скорос согласованию Цель изобр 30 точности упра(72) Авторы изобретения В, Н, Гришин, А. Изооретение касается систем автоматического управления и может быть использовано в системах автоматического регулирования, исполнительным органом которых является звено непрерывного дей, тви (следящая система), например в летательных аппа 1 эатах для управления р алями, вы. соты, курса, элеронами, поворотной камерой двигательной установки или рулевыми управляюшими соплами на космических аппаратах.Известен спосоо формирования корректирующего сигнала для ситем автоматического регулирования 1, который заключается в формировании специального линейного корректирующего контура в цепи командного сигнала на привод.Параметры коррекции выбираются таким образом, чтобы уменьшить запаздывание в следящей системс при оольших амплитудах входного сигнала. омимо сложной аппаратурной реализации и слабой помехозащишенности недостаток способа заключается в том, что в нем нс учитывается истинного, фактического движения привода и фактических динамических характеристик его. Система реализации известного способа настроена на априорные характеристики привода и производит коррекцию только командного сигнала, не учитывая этого способа следуюшис: метрических колебаний в сибыстродействие при аперподных воздействиях, пониженвследствие сильной зависиения от возмущаюших воздейме рулевого привода (напри- охода) и от несоответствия и расчетной скоростной харивода по величине ошибки ия (например, несимметричтной характеристики по рас)стения состоит в увеличении вления.Эта цель дост 11 гается тем, что опрсдел 51- ют динамическую составляющую коман;сного сигнала и в интервале времени, на котором знаки величины динамической составляющей и ее производной различны, сравнивают производные командного сигнала и выходной координаты.На фиг. 1 изображен график зависимости сигналов управления от времени прп известном способе управления; на фпг. 2 - график реакции следящей системы на смещенный командный сигнал; на фиг. 3 - пример реализации способа в рулевом приводе согласно изобретения; на фиг. 4 и 5 переходные процессы в системе управления движением космического аппарата; па фиг. 6 - области устойчивости в плоскости параметров автомата стабилизации.Для пояснения сущности способа необходимо ответить на вопроснужно ли продолжать слежение за командным сигналом на интервале 1 - 1 (фиг. 1), когда скорость и сама величина командного сигнала различны по знакам б,о.бо(0.Для такого рода систем, для которых предназначен способ, применяется рулевой привод исполнительных органов, являющийся непрерывной следящей системой системой слежения фактического отклонения исполнительного органа за задаваемой величиной командного сигнала.Главное динамическое ограничение в системах слежения - ограниченная скорость привода, обусловленная его ограниченной мощностью.Общий недостаток способов управления непрерывных следящих систем заключается в ограничении скорости слежения, когда при небольших сигналах (в линейной зоне скоростной характеристики привода) рулевой привод обеспечивает слежение за командным сигналом, а при увеличении сигнала (в зоне насыщения по скорости) слежение происходит с запаздыванием.Этот процесс в следящей системе привода при работе его в зоне насыщения скоростной характеристики иллюстрируется па фиг. 1, где приняты следующие ооозначения: бц 511 команднъй сигнал, Являюпсийся гармонической функцией; б - ответная реакция системы - отклонение исполнительного органа прп ограниченной скорости слежения. На фиг. 1 видно несоответствие командного и ответного сигналов по знакам, являющееся следствием запаздывания в системе слежения: командный сигнал на интервале времени ,(1(1, требует отрицательного знака управляющего воздействия, а ответная реакция привода - ссоложительна.Это обстоятельство вызывает увеличение ошибки вплоть до неустойчивости управления. Гак как командный сш пал отражает тр.- буемое управлесие аппаратом и уменьспение его говорит о том, что фактическое, существующее на данньш момент, управл 511 о шее воздействие велико, то станет очевидным и ответ на поставленный вопрос; на нисходящей ветви командного сигнала не следует осуществлять слежения за самой величиной командного сигнала, а необхо димо вести слежение за его скоростью.Поэтому смесцепне командного сигналав интервале 111, на величину накопившесося рассогласования Л (1) между требуемым б(1) и фактическим рулем й(1):ь(,) ==",.Ю - "Р)обеспечит нужное движение руля - умешшаюшее управляющее воздействие, т. е.как раз требуемое слежение за скоростью 20 командного сигнала.На фиг. 2 показана реакция следящейсистемы привода при таком смещении.Смещенньссс командный сигнал обознасесс ц омПрп таком управлении приводом можнополностью исключить запаздывание в следящей системс,сзаь.смо ог амплитуды входносо сигнала и ограничения с коростной характеристики привода.60 Формировассис динамической соссавляюшей командного сигнала.Эта операция заключается в исключениииз командного сигнала статической составляющей. Например, если командный сигнал на привод рулевых сопл КЛ сформирован в видегде К,коэффициент передачи автомата стабилизации по сигналу тангажа;К,коэффициент передачи по сигналу угловой скорости;Г - угол отклонения КА в плоскоститангажа;- координата перемещения КЛ, тов установившемся ре 5 киче отклонение рулевых сопл б обусловлено составляющей сигнала К,1.Динамическая составляющая в этом слусае определится какВыделессие временного интервала, на ко тором знаки динамической составляющейи скорости различны.Эта операсспя состоит в определении разности текущего и предшествующего значений динамической составляющей, сравне ния знака полученной разности со знакомсамой составляющей. Несовпадение знаков и определяет временной интервал, где требу ется осуществлять слежение за скоростью команд 11 ого сипсала, а пс за вели инной есо.Работа следящей системы привода.При совпадении знаков динамической составляющей командного сигнала и скорости его (Восходящая Ветвь) бдпн банч)0 производится обычное слежение руля за командным сигналом; ошибка рассогласования в следующей системе привода Л =6, - б поступает в запоминающее устройство,В случае различных знаков динамической составляющей командного сигнала и его скорости (цпсходягцая ветвь) б , б,п(0 из командного сигнала вычитается накопившаяся погрешность слежения Л(г), запомненная на момент смены знака скорости командного сигнала. При этом поступление сигнала ошибки рассогласования Л(1) в запоминающее устройство прерывается. Оно хранит ошибку слежения, накопленную на предыдущем этапе, которая является величиной постоянного смещения командного сигнала. Таким образом, устраняется начальная ошибка рассогласования в системе привода и происходит слежение за скоростью изменения командного сигнала.В случае обеспечения хорошего слежения за командным сигналом ошибка рассогласования Л (1) близка к нулю. Поэтому следящая система привода плавно переходит к обычной структуре на установившемся режиме работы системы управления,Возможная реализация способа в аналоговом варианте системы показана на фиг. 3, где функциональная схема содержит следящую систему рулевого привода 1, блок 2 формирования динамической составляющей командного сигнала, блок 3 выделения временного интервала, на котором знаки динамической составляющей и скорости ее различны, ограничитель 4 командного сигнала, запоминающее устройство ошибки рассогласования, выполненное на интегрирующем операционном усилителе 5, коммутационные блоки 6 и 7 выполнены на реле. Положение реле соответствует работе системы для случая смещения командного сигнала.Эффективность применения предлагаемого способа иллюстрируется ца фиг. 4 и 5, На фиг, 4 показан переходной процесс в системе управления движением КАпри отработке начальных возмущений для обычного варианта работы автомата стабилизации, На фиг. 5 представлен переходной процесс в случае применения способа при том же начальном отклоненип аппарата и сохранении тех же передаточных чисел и структуры автомата стабилизации. Как видно из представленной иллюстрации, одно это изменение следящей системы привода позволило существенно увеличить устойчивость и поднять качество управления.Полученный процесс также подтверждает утверждение о расширении области допустимых возмущений, отрабатываемых системой.На фпг. 6 показаны области устойчивости в плоскости параметров автомата стабилизации. Пунктиром обозначена область устойчивости системы для цзвестнои структуры автомата стаоилизации; сплошной линией - для случая применения предлагаемого способа.Увеличение области устойчивости системы в случае применения способа позволит выбирать большие передаточные числа в автомате, обеспечивая большее быстродействие и повышение точности управления. 30 Способ формирования управляющегосигнала в системах автоматического регулирования путем формирования командного сигнала и сравнения его с выходной координатой системы, о т л и ч а ю щ и й с я тем, что, с целью увеличения точности управления, определяют динамическую составляющую командного сигнала и в интервале времени, на котором знаки величины динамической составляющей и ее производной различны, сравнивают производные командного сигнала и выходной координаты.Источники информации,принятые во внимание при экспертизе 1. Авторское свидетельство СССР Мо 399825, кл. 6 05 В 11/01, 1971.2, Котельников В. А. Улучшение стабилизации систем регулирования при ограниченной скорости сервопривода при помощи запоминающего устройства. Автоматика и телемеханика Я 4, 1957. зд 40 45 50 5 10 15 20 2565 ОО 52 Фиг Мд Редактор Н. Суханов аказ 2714/2 зд.16 ираж 101 одписно
СмотретьЗаявка
2409234, 04.10.1976
ПРЕДПРИЯТИЕ ПЯ А-1001
ГРИШИН ВЛАДИМИР НИКОЛАЕВИЧ, ЛОВЦОВ АЛЕКСЕЙ ИВАНОВИЧ, МАРЦИНКЕВИЧ ТАМАРА ВАСИЛЬЕВНА, СОДОНСКИЙ ВАДИМ АЛЕКСАНДРОВИЧ, ФРОЛОВА АНТОНИНА ПЕТРОВНА
МПК / Метки
МПК: G05B 11/01
Метки: сигнала, системах, управляющего, формирования
Опубликовано: 28.02.1979
Код ссылки
<a href="https://patents.su/6-650052-sposob-formirovaniya-upravlyayushhego-signala-v-sistemakh-avtomaticheskogo-regulirovaniya.html" target="_blank" rel="follow" title="База патентов СССР">Способ формирования управляющего сигнала в системах автоматического регулирования</a>
Способ контроля динамической погрешности фотоэлектрической угломерной следящей системы

Номер патента: 1019236
Опубликовано: 23.05.1983
Авторы: Бурачек, Дзюбенко, Живов, Павлюченков
МПК: G01B 11/26
Метки: динамической, погрешности, системы, следящей, угломерной, фотоэлектрической
...световой луч в заданные точки на Фиксирован-ные углц и измеряют эти углы следящей системой, измерение углов отклонения визирной оси следящей системы при отклонении светового луча по заданному закону производят в моменты прохождения лучом заданных точек и по разности двух измерений определяют величину динамической погрешности.ФНа чертеже изображена схема установки, реализующей способ контроля динамической погрешности фотоэлектрической угломерной следящей системы.Схема содержит контролируемую фотоэлектрическую следящую систему 1,оптический компенсатор 2зеркало 3(или коллиматор), которые установ"лены соосно, аотражающая поверхностьзеркала 3 перпендикулярна к этойоси. Датчик Й угла кинематически соединен с оптическим компенсатором...
Способ исследования динамических характеристик зрительной системы

Номер патента: 733656
Опубликовано: 15.05.1980
МПК: A61B 5/16
Метки: динамических, зрительной, исследования, системы, характеристик
...зависимость пространственной частоты решетки от скорости ее движения, при которой возникает иллюзия. По оси ординат скорость (М ) движения решетки в град/с, по оси абсцисс - пространственная частота (.Ю), выраженная в цикл/град.10 Предлагаемый способ заключается в том, что испытуемого помещают перед белым непрозрачным экраном, Взор испытуемого фиксируют на неподвижной красной точке в центре экрана, По экрану в пределах заданного растра перемещают изображения. Скорость перемещений решетки экспериментатор может изменять в пределах 0,01 60,0 град/с. 1 ентр растра 0 совпадает с точкой фиксации взора и центром экрана. Стимулами являются решетки, образованные из чередующихся черно-белых полос. Используют решетки с пространственной частотой в...
Способ формирования трехуровнего сигнала в релейных системах управления динамическим объектом и релейный регулятор для его осуществления

Номер патента: 1758633
Опубликовано: 30.08.1992
Автор: Леденев
МПК: G05B 11/14
Метки: динамическим, объектом, регулятор, релейный, релейных, сигнала, системах, трехуровнего, формирования
...соответственно рявнк Н = О, ц й=/ (0 ( 0 обозначает цп як ц и у р о ц е и ьвыходного сигнала), Гм г:огцц.е спгцлзд лпервого 8, второго 9, тр(.т; око 1 йи четвертого 11 элементовсоатпст(4) Тогда стелло равнлг Кв = О, Г г =- О, К = Ои К = О, Выходной сигнал третьегоэгемента ИЛИ 16 У = О (первый выходустройства 23), выходной сигнал четвертого элемента ИЛИ 17 11+ = О (второй выход устройства 24), вследствиечего инверсный выходной сигнал пятогоэлемента ИЛИ 18 К = 1("1 ф обозначает7высокий уровень выходного сигнала) 10и этот сигнал производит обнулениевторого интегратора 2 1 (выходной сигггал этого интегратора Я = О),При Х ) О выходной сигнал первогоинтегратора 5 1 = Д, В этом случае 15срабатывает четвертый компаратор 7(его уровень...
Способ определения динамической характеристики вакуумной измерительной системы при контроле герметичности изделий и установка для его реализации

Номер патента: 934268
Опубликовано: 07.06.1982
Авторы: Мясников, Сажин, Фадеев, Юрченко
МПК: G01M 3/02
Метки: вакуумной, герметичности, динамической, измерительной, контроле, реализации, системы, характеристики
...именно рабочего потока пробного газа от калиброванной течи и без дополнительных погрешностей. Здесь при переключении потоков происходит замена газов, а условия в вакуумной измерительной системе остаются неизменными.На чертеже дана схема установки для реализации способа определения динамической характеристики вакуумной измерительной системы при контроле герметичности изделий.Установка содержит калиброванную течь 1 пробного газа, подключенную через клапан 2 к измерительной вакуумной системе 3, а через клапан 4 - к обходной вакуумной системе 3, а через клапан 4 - к обходной вакуумной системе 5, течь 6 газа, не содержащего пробйого, дополнительные клапаны: клапаны 7 для подключения ее к вакуумной измерительной системе 3 и клапан...
Способ уравновешивания динамического момента на входном валу привода возвратно-движущихся масс и устройство для его осуществления

Номер патента: 1724970
Опубликовано: 07.04.1992
Авторы: Акопджанян, Джавахян, Солодихин
МПК: B21B 21/00, F16F 15/26
Метки: валу, возвратно-движущихся, входном, динамического, масс, момента, привода, уравновешивания
...и сумме гп = гп 2 + 3/Яш массы в 2 клети 2 и эквивалентной массы звеньев валковой группы с суммарным моментом инерции 3, учитывающей динамический момент последних в их возвратно-качательном движении относительно клети, реализуемым ведущими шестернями радиуса Яш начальной окружности,Для уравновешивания горизонтальных составляющих сил инерции и разгрузки фундамента в горизонтальном направлении центры тяжести Я 1 кривошипных зубчатых колес выносятся за их ось на величину 0,2- 0,3 длины кривошипа ОА = Яз (фиг,5).Устройство работает следующим образом.При вращении от приводных шестерен 13 и 14 кривошипных зубчатых колес 1 последние посредством дополнительных кривошипных пальцев 3 увлекают эа собойрезультате неравномерного движения цен-. 20...
Предыдущий патент: Двухдвигательный следящий привод
Следующий патент: Самонастраивающаяся система управления
Случайный патент: Измерительная ячейка керра