Система идентификации параметров объекта
Похожие патенты | МПК / Метки | Текст | Заявка | Код ссылки
Текст
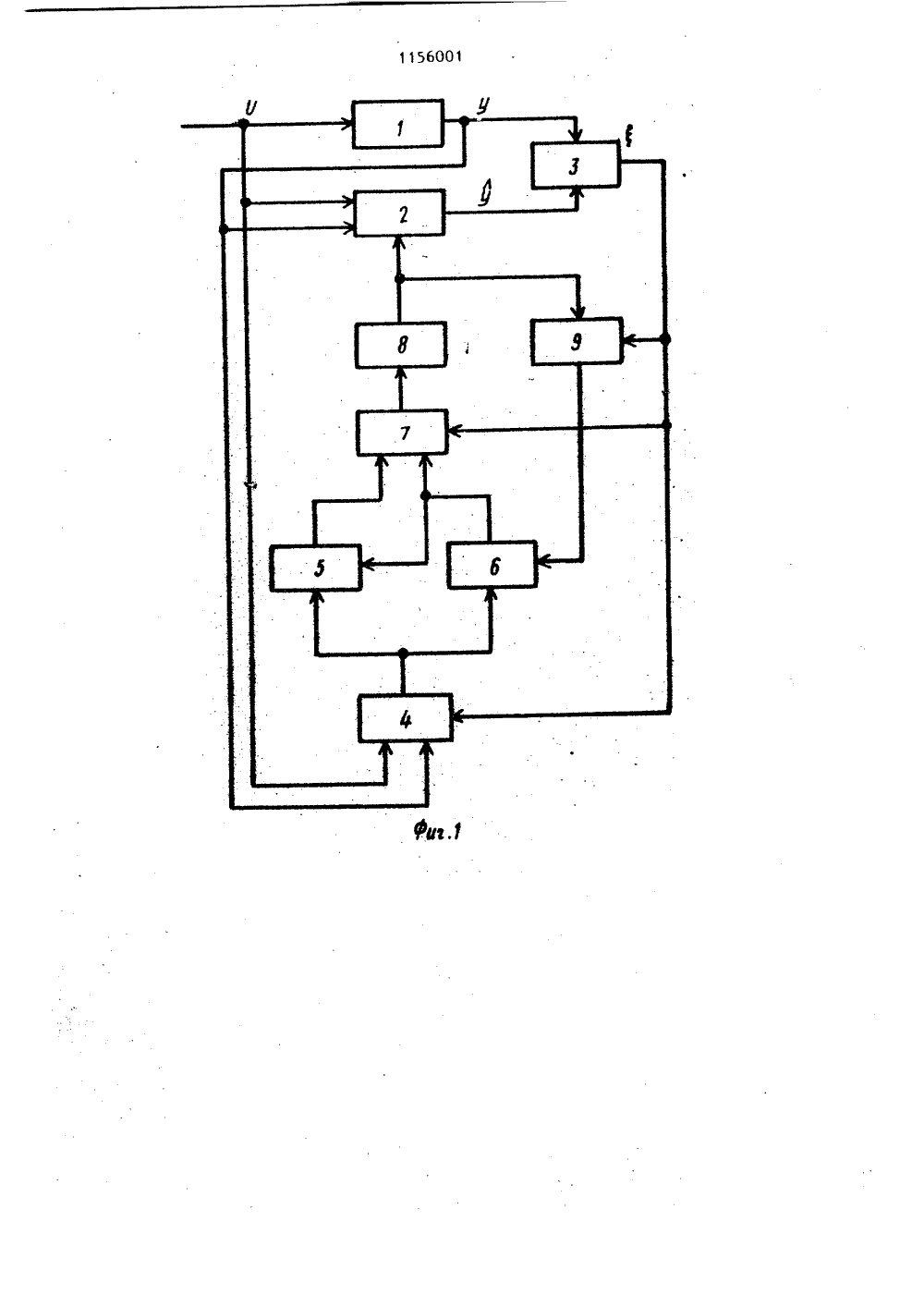
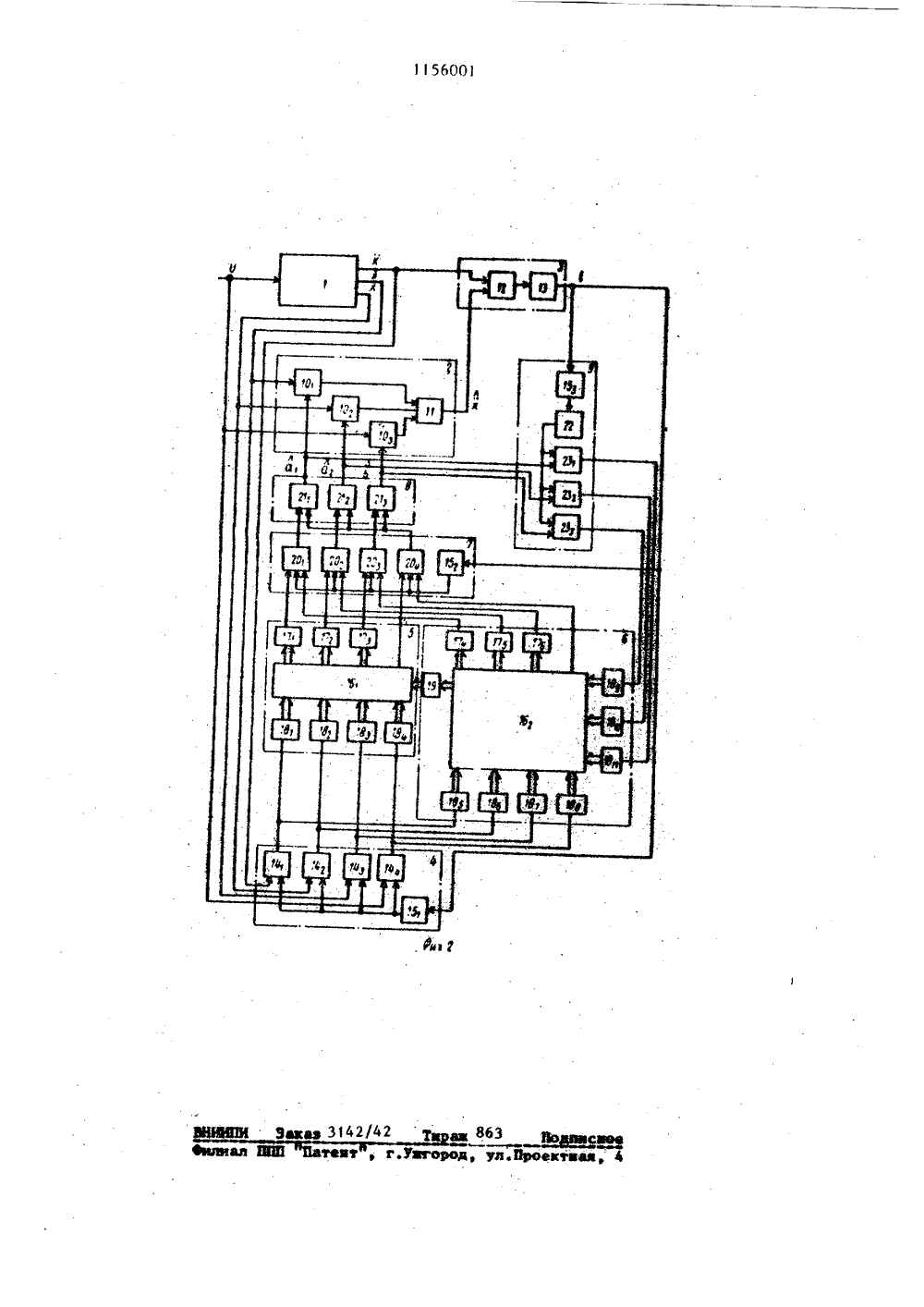
) С 05 В 13/О ЕТ СССИ ОТНРЫТИЙ 3676767/24-2421. 12,8315. 05. 85. Бюл.О.С. Попов, Н.АСироткин, И.А.Ленинградский иприборостроения62-50(088,8)1. Авторское св415, кл. С 05.В(46) (72) Е.Я. (71) А.Р, Усов виационБалони ндреев ститут:(53) (56) В 42 етель 7/02 74 ельство ССС3/02, 1982 орла оммута ГОСУДАРСТВЕННЫЙ НПО ДЕЛАМ ИЗОБРЕП:НИ 2. Авторское свВ 949635, кл. 6 О 5 (прототип),(54) (57) СИСТЕМА ИДЕНТИФИКАЦИИ ПАРАМЕТРОВ ОБЪЕЛА еодерзащлн модельобъекта. иденти 4 щкаиии, бло 1 с сравнения, блок иамати,: блок запрета, пер"вый н второй блоки реализации алгорегмов идентиФикации, коммутатор,первый вход модели объекта иднетиФикации соединен с входом объектаидентиФикации, а ее выкод и выходобъекта идентибююации, соединены еиервье и вторым входами блока сравнення, вход и вмход объекта идентиФикации соединены с первым и вторымвходами блока запрета, выход которого через первый блок реализации алгоритмов идентиФикацин соединен с первым входом коммутатора, выход второго блока реализации алгоритмовндентиФикации соединен с вторым входом коммутатора, а выход блока сравнения соединен с управляе)сими входами коммутатора и блока запрета, о тл н ч а )о щ а я с я. тем, что, сцелью иовывения быстродействия,содераит реле времени, выход ктора через блок памяти соединен свторьв входом модели объекта идентификации и входом реле времени, подкаоченным выходом к второму входувторого блока реализации алгоритмовидентификации, первый вход которогосоединен с выходом блока запрета, авыход нодюючен к второму входупервого блока реализации алгоритмовидентиФикации, выход блока сравнениясоединен с управлязщвм входом релевремени, а выход объекта идеитиФика"ции соединен с третьни входом моделиобъекта иденти 4 икации.Изобретение относится к системамавтоматического управления, а именнок адаптивным системам управления.Известны системы идентификациипараметров объекта, в которых подстраивается под объект его динамическая модель с целью минимизациисигнала, характеризующего степеньнесовпадения выходных переменныхмодели и объекта, в частности система идентификации параметров объекта,содержащая блок реализации алгоритмов идентификации и последовательносоединенные блок управления, модельобъекта, модель блока датчиков состояния объекта и блок сравнения, выходы которого соединены с вторымивходами модели объекта и первыми входами блока реализации алгоритмовидентификации, выходы блока управления соединены с входами объекта, выходы которого соединены через блокдатчиков состояния объекта с вторымивходами блока сравнения, выходы модели объекта через блок реализации ал- дгоритмов идентификации соединены стретьими входами модели объекта, выходы которой соединены с вторымивходами блока реализации алгоритмовидентификации Я ,36Недостаток таких систем - ограниченные Функциональные возможности,.обусловленные тем, что они не могутудовлетворительно решать задачи параметрической идентификации, которыечасто встречаются нрн построении33адаптивных систем управления. Особенность таких задач состоит в том,что из-за недостатка информации обидентифицируемом объекте существуе46не одна, а множество оценок параметров модели, позволяющих минимизировать сигнал невяэки реакций модели иобъекта.Наиболее близкой по техническойсущности к изобретению является сис Зтема, содержащая модель, блок сравнения, первый и второй блоки реалнэа 1 ции алгоритмом идентификации 2 .Недостатком известной системыявляется малое быстродействие, обус,ловленное тем, что оценки параметров,.полученные ранее системой, не используются при выработке новых оценокпараметров в канале долговременнойидентификации;,оценки параметров, Яполученные в канале долговременнойидентификации, не используются привыработке новых оценок параметров в канале оперативной идентификации;при вычислении выходных переменных. в модели приходится интегрировать уравнения, описывающие динамику объекта идентификации.Цель изобретения - повышение быстродействия системы идентификации параметров объекта.Укаэанная цель достигается тем, что в систему идентификации параметров объекта, содержащую модель объекта идентификации, блок сравнения, блок памяти, блок запрета, первый и второй блоки реализации алгоритмов идентификации, коммутатор, первый вход модели объекта идентификации соединен с входом объекта идентифнкации, а ее выход и выход объекта идентификации соединены с первым и вторым входами блока сравнения, вход и выходобъекта идентификации соединены с первцм н вторым входами блока запрета, выход которого через.первый блок реализации алгоритмов идентификации соединен с первым входом коммутатора, выход второго блока реализации алго" ритмов идентификации соединен с вторым входом коммутатора, а выход блока сравнения соединен с управляющими входами коммутатора и блока запрета,введено реле времени, выход коммутатора через блок памяти соединен с вто-, рым входом модели объекта идентификации и входом реле времени, подключенным выходом к второму входу второго блока реализации алгоритмов идентификации, первый вход которого соединен с выходом блока запрета, а выход подключен к второму входу первого блока реализации алгоритмов идентификации, выход блока сравнения соединен с управляющим входом реле времени, а выход объекта идентификации соедкнен с третьим входом модели объекта идентификации.Влагодаря указанному выполнению системы создается обратная связь, проходящая через коммутатор, блок па- мяти, реле времени с выхода на вход второго блока реализации алгоритмов идентификации, с помощью которой полученные ранее в системе оценкн вар- метров используются для получения новых оценок; образуется перекрестная связь с выхода второго блока реализации алгоритмов щентификации на вход пврвого блока реализации алгоритмов идентификации, которая обеспечивает1156 х + ах + а хЬо,передачу оценок параметров из каналадолговременной идентификации в каналоперативной идентификации; вводитсясвязь между выходом объекта идентификации и третьим входом модели,.которая позволяет вычислять оценкифазовых скоростей объекта в зависимости от его текущего состояния безинтегрирования уравнений движения. 1 аСовокупность указанных признаков приводит к повышению быстродействия , системы идентификации беэ ущерба для ее функциональных возможностей.На фиг. 1 приведена функциональная ц схема предлагаемой системы; на фиг.2- пример реализации системы идентификации параметров на случай объекта, описываемого дифференциальным уравнением второго порядка: 20 где и - управляющее воздействие; х,х,х - компоненты выхода объекта у. дСистема содержит объект идентификации 1, модель 2 объекта идентификации, блок сравнения 3, блок запрета 4, первый блок реализации алгоритмов идентификации 5, второй блок реализации алгоритмов идентификации 6, коммутатор 7, блок памяти 8, реле времени 9, электронные умножители 10 аналоговых сигналов, трехвходовый сумматор 11, двухвходовый вычитатель 12, прецизионный выпрямитель 13, пер-Зф вые электронные ключи 14, компараторы 15, микро-ЭВИ 16, цифроаналоговые преобразователи 17,. аналого-цифровые преобразователи 18, буферный регистр 19, двухпозиционные электронные клю", чи 20, электронные устройства выборки и запоминания 21, ждущий мультивнбратор 22, вторые электронные ключи 23.На фигурах также обозначено; цуправляющее воздействие; у - реакция . объекта идентификации; у - реакция его модели; х,х х - компоненты реакции объекта у; х - компонента реакции модели у;- невязка выходных сигналов объекта 1 и.модели 2.Реализация предлагаемой системы не вызывает принципиальных затруднений и может быть осуществлена на серийно выпускаемых устройствах.Иодель 2 объекта идентификации может быть реализована на аналоговых умножителях и сумматорах. ТрехОО 1 .4входовый сумматор 11 выполняетсяна базе операционного усилителя.Блок запрета 4 состоит из электронных ключей 14 и компаратора 15.Электронные ключи 14, а также релевремени 9 реализуются одинаково посхеме последовательного ключа на полевом транзисторе КП 201 Л. Компаратор 15 может быть выполнен на базеинтегрального компаратора 521 СА 2.Первый 5 и второй 6 блоки реализации алгоритмов идентификации реализуются на базе отечественных микроЗВИ фЭлектроника"60",. Исходные данные о состоянии объекта идентифика-.ции 1 через блок запрета 4 поступаютна вход аналого-цифровых преобразо вателей 18а информация о выработанных ранее .оценках параметровФ а, а через электронные ключи релевремени 9 - на входы аналого-цифровых преобразователей 18 з я, где онипреобразуются в цифровой код и вводятся в микроЭВИ в режиме прямогодоступа в память. Передача оценокпараметров нэ блока 6 в блок 5 каналаоперативной идентификации ведетсяпобайтно через буферьый регистр 19который реализуется на ИС Е 589 ИР 12и подключается между выходом микроЭВИ 16 и входом микро"ЭВМ 16, . Буферный регистр (К 589 ИР 12) имеет всвоем составе все необходимые устройства для подключения внещнеймикро"ЭВМ к единой магистрали данных.л, л Фяовые оценки параметров а ,ад,о,вырабатываемые микро-ЭВМ 16, и 16,преобразуются иэ цифровой формы .в аналоговую при помощи цифроаналоговых преобразователей 17.Алгоритмы параметрической идентификации на основе метода наименьаихквадратов, дающего систему линейныхалгебраических уравнений относительнооцениваемым параметров, в общей вндвприведены в (3), а методы рещениялинейных уравнений, в том числе и вырожденных, изложены в (4). Расчетные .формулы, к которым сводятся эти методы при реализации их на микро-ЭВИ,приведены далее,Блок памяти 8 состоит из электрон-ных устройств выборки и запоминани.аналоговых сигналов 21, которые могут быть выполнены на базе операционных усилителей, например И 4 ОУД 7Система работает слвдуювре обра"зом.(2) 36 х щ Ах + Вп,где геК - вектор. фазовых координат;3цЕК - вектор управления;А, В - подлежащие определениюматрицы искомых коэффициентов.Например, для объекта идентификации (1) матрицы А и В имеют вид 0 зо(3) О 1 а, а 2 4 причем х щ (хх,), х, = х, х х.Согласно методу оценки параметров в виде расширенной матрицы параметров О(А;В) являются решением системы линейных алгебраических уравне- ний(4) где Р и К " матрицы, вычисленные на . основании результатов измерений на входе и выходе системы: 45 51 т,т,где1;=(;)=(;,цГ), ;-е 1;), -,з. зфПоскольку в рассматриваемом примере часть параметров матриц А и В известна, можно считать Вне зависимости от способа получения оценок параметров и объема выПроцесс оценивания параметров в системе идентификации разделен по двум каналам: оперативному и долговременному, Оперативный канал (блок 5) используется для оценки параметров 5 по текущей выборке исходных данных, долговременный канал (блок 6) уточняет оценку на основании вновь поступающих данных и данных, накопленных ранее.В каждом канале могут использовать.1 б ся различные алгоритмы параметричес" кой идентификации (поисковые и беспоисковые).Рассмотрим работу системы в случае, когда оба канала реализуют метод наи меньших квадратов. Структура объекта предполагается заданной, например, в нидеОе 1 х + ех 2Общее решение системы линейных алгебраических уравнений (4) можно получить из постановки дополнительной экстремальной задачи: ИС - С Ц-+ пап(6) на уравнениях связи (4). Как извест-но иэ (4), оно имеет вид Й =КР+С(Е-РР)(7)где "+" - символ псевдообращения;Е - единичная матрица;С, - матрица притяжения,В качестве матрицы притяжения Сиспользуют априорны" оценки параметров, полученные на предыдущих этапахидентификации. Если такая информацияотсутствует, то матрица выбираетсяпроизвольно, в частности нулевой,что и имеет место в системе-прототи"пе.Если матрица Р невырождена, тоР щ Р и задача идентификации будетиметь единственное решение:Са если матрица Р не содержит информации об объекте Р0то Р0и оценка параметров будет равна матрице притяжения, что следует из формулы (7),Формулы (3) и (7) являются основой для алгоритмического обеспечениямикро-ЭВИ 16 16. Алгоритм псевдообращения матрицы Р любого порядкаизложен в (4). В предлагаемой системе матрица притяжения поступает на вход блока 16 канала оперативной идентификации по,перекрестной связи через бу ферный регистр 19 с выхода блока 1 канала долговременной идентификации. Для последнего канала априорная информация (матрица притяжения) поступает с выхода аналогового блока памя,борки задача идентификации имеет не-, единственное решение, если переходные процессы на входе-выходе объекта недостаточно информативны (в этом случае матрица Р получается вырожденной).Для объекта идентификации 1 это справедливо, если объект, замкнут линейными обратньвщ связями по состоя- ниюти 8 через электронные ключи 23 23, 235. реле времени 9. Перед началом работы содержимое блока памяти 8 неопределенно, поэтому исходная матрица притяжения либо полагается 5 произвольной, либо вносится пользователем в микро"ЭВМ 16 на основании предварительного теоретического исследования. объекта.По перекрестной связи эта оценка 10 поступает в микро-ЭВМ 16, посредством блоков 17, преобразуется в форму аналоговых сигналов н через электронные ключи 20 поступает в блок памяти 8, Устройство выборки и 15 запоминания 21 блока памяти 8 пере водится в режим запоминания одновременно с пуском цифроаналоговых преобразователей по сигналу управления, поступающему с четвертого выхода микро"ЭВМ 16 через коммутатор 7 на вторые входы устройства 21. Система идентификации готова к работе.С выходов блока памяти 8 оценки параметров поступают на второй вход 25 модели 2, где вычисляется оценка фазовой скорости объекта (в данном случае это хху согласно уравнению (1) или (3) объекта 1.В блоке сравнения 3 вычисляется З 0 сигнал невяэки фазовых скоростей объекта 1 и модели 2, который может Формироваться различным образом, в частности как геометрическая сумма невязок всех или части наиболее су 35 щественных фазовых скоростей модели 2 и объекта идентификации 1. В данном случае с помощью вычнтателя 12 и прецизионного выпрямителя 1.3 формируется сигналщх- хЕсли сигнал рассогласования превышает пороги срабатывания компараторов 15, то блок запрета открывается 45и пропускает аналоговые сигналы свхода и выхода объекта 1 через электронные кювочи каналов оперативной идолговременной идентификации (блоки .5 и 6):коммутатор 1 подключает аналоговые входы блока памяти 8 черездвухпоэиционные ключи 20, 20 а,20, 20 к выходам блоков 17 канала оперативной идентификации, аждущнй мультивибратор 22 реле времени 9 подает сигнал на размыканиеэлектронных ключей 23, тем самымразрывая цепль обратной связи с выходов блока. памяти 8 на входы блоков 18 канала долговременной идентификации на заданный промежуток времени, Если в течение этого промежутка сигнал рассогласования с выхода блока сравнения превысит пороговое значение компаратора 15 реле времени 9 вновь, то выдержка времени устанавливается снова. Следовательно, обратная связь не будет. функционировать до тех пор, пока система идентификации ке перейдет на длительное время в устойчивое состояние, прн котором сигнал рассогласования мал.В микро-ЭВМ 16 канала оперативной идентификации вырабатывается новая оценка параметроз по первой вы-. борке исходных данных согласно формулам (5) и (7) и через коммутатор 7 передается в блок памяти 8. Задание исходной матрицы притяжения было оговорено.Согласно методу, каковы бы не были условия идентификации, в том числе и при условии недостатка информации об объекте, оперативная оценка параметров, поступающая с блока памяти 8 в модель 2, будет минимизировать величину рассогласования реакций модели 2 и объекта 1. При этом соблюдение условия (6) придает. этой оценке устойчивый характер и при наличии шумов измерений, искажающих область возможных решений уравнения идентификации (4).Величина невязки уменьшается до пороговой величины, вследствие чего срабатывают блок запрета 4,коммутатор 1 и реле времени 9.Электронные ключи 14. блока запрета 4 размыкаются по сигналу компаратора 15 н прекращают доступ исходных данных в систему идентификации. Ваочи коммутатора 7 перекидываются в положение, при котором входы блока памяти 8 подключены к выходам блоков 17 канала долговременной идентификациихВ канале долговременной идентификации происходят процессы выработки более точной оценки параметров, что проявляется после нескольких повторных срабатываний системы идентификации по превышению сигналом невяэки порогового значения. В отличие от канала оперативной идентификации в блоке 6 выработка оценки параметров происходит не только по текущей выборке исходных данных, но и о (Е)Оценивание должно происходить посуммарным массивам: ЯР+С,(Е-РР)(9) Так как объем хранящихся исходных данных конечен, происходит их постепенное обновление, что позволяет отслеживать дрейф параметров объекта идентификации 1. В силу больного объема суммарной выборки с нескольких участков идентификации задача параметрической идентификации становится лучве обусловленной, что обеспечивает хороюую точность нахождения долговременной оценки параметров. Через коммутатор 7 эта оценка .иостунает в блок памяти 6 и далее на входы модели 2. По перекрестной связи эта оценка передается через буферный регистр 19 в микро-ЭВИ 6 канала оперативной предыдущим. Для этого реализуетсядополнительное суммирование согласно(5) по текущей и по (К) предыдущимвыборкам исходных данных.В микро-ЭВМ 16 можно хранитьтолько суммарные массивы Р,Р9 рх., эк 1 экяэ. " ЭКЮгде индексобозначает номер выборки. Суммарныемассивы образуются,какФ-( Ю ФОР , Р; + Р; К:Е К;+К(В)1 1;.л идентификации, где она запоминаетСя и используется в качестве матрицы притяжения.Если длительное время не происходит уточнение оценки параметров и сигнал блока сравнения 3 мал, то ждущий мультивибратор 22 реле времени 9 заканчивает свою работу и переходит в состояние, при котором управляемые им электронные ключи 23 соединяют выходы блока памяти 8 и входы блоков 18, канала долговременной идентификации. По петле обратной связи происходит коррекция матрицы притяжения в памяти мнкро-ЭВИ 16 для канала долговременной идентификации. По перекрестной связи через буферный регистр 19 зта матрица переписывается также в память микро"ЭВИ 16 канала оперативной идентификации.Таким образом, предлагаемая система идентификации позволяет сократить время, в течение которого оцениваются параметры объекта и вычисляется его реакция на управляющее воздействие, что связано с отсутствием операции интегрирования, и число итераций-циклов срабатывания блока сравнения, в течение которых уточняются оценки параметров объекта, что связано с более иолиьв использованием априорной информацииоб объекте,т.е.возрастает быстродействие системы в целом.
СмотретьЗаявка
3676767, 21.12.1983
ЛЕНИНГРАДСКИЙ ИНСТИТУТ АВИАЦИОННОГО ПРИБОРОСТРОЕНИЯ
ПОПОВ ОРЕСТ СЕРГЕЕВИЧ, БАЛОНИН НИКОЛАЙ АЛЕКСЕЕВИЧ, СИРОТКИН ЕФИМ ЯКОВЛЕВИЧ, АНДРЕЕВ ИВАН АЛЕКСАНДРОВИЧ, УСОВ АЛЕКСАНДР РАДИЕВИЧ
МПК / Метки
МПК: G05B 13/02
Метки: идентификации, объекта, параметров
Опубликовано: 15.05.1985
Код ссылки
<a href="https://patents.su/8-1156001-sistema-identifikacii-parametrov-obekta.html" target="_blank" rel="follow" title="База патентов СССР">Система идентификации параметров объекта</a>
Блок приращений параметров самонастраивающейся модели линии электропередач

Номер патента: 1427466
Опубликовано: 30.09.1988
Авторы: Антонов, Ванин, Нудельман
МПК: H02H 3/40
Метки: блок, линии, модели, параметров, приращений, самонастраивающейся, электропередач
...сумматора 60, выход которого соединен со свободным входом вычитателя 53, дру" гой вход первого дополнительного сумматора 60 и один иэ свободных входов ЗО сумматора 52 промежуточными входами 61 и 62 соединены с аналогичными вы. ходами 35 и 39 соответствующего звена модели 1 длинной ЛЭП. Третий вход сумматора 52 через дополнительный ум- З ножитель 63 подключен к выходу второго дополнительного сумматора 64, входы которого соединены с первым входом вычитателя 53 посредством первого усилителя 65 и каскадно соединенных дифференциатора 66 и второго усилителя 67. Свободные входы умножителей 59 и 63 объединены между собой, образуя третий промежуточный вход 68 звена. Вход 55 схемы формирования первого звена 49 подключен к выходу дополнительного...
Устройство для моделирования объектов с распределенными параметрами

Номер патента: 1043660
Опубликовано: 23.09.1983
МПК: G06G 7/46
Метки: моделирования, объектов, параметрами, распределенными
...6, работающегов фазоимпульсном режиме, элемента ИЛИ-НЕ 7, КБ-триггера 8, элемента. 2 И-ИЛЙ 9, счетчика 10, а такке тактовые входы 11 и 12 и вход13 устройства,Генератор 4 используется дляформирования с периодом Т развертывающего напряжения Бф(С), формакоторого определяет характер моделируемой нелинейности д(ур) (фиг,3).В качестве блока 4 может быть использован последовательно соединенный генератор пилообразного напряжения, синхронизированный сигналом, подаваемым на .тактовый вход11 устройства и блок нелинейности,например диодный, функциональныйпреобразователь (не показаны).Перед началом работы устройствасчетчик 10 сбрасывается в нульпутем подачи наего вход 14 импульсасброса Ко.Работа устройства начинаетсяс подготовительного периода, в...
Блок контроля параметров аккумуляторов в батарее

Номер патента: 1080226
Опубликовано: 15.03.1984
Авторы: Касаткин, Федотов, Эйгель
МПК: H01M 10/48
Метки: аккумуляторов, батарее, блок, параметров
...контроль только одного параметра аккумуляторов - величины напряжения на них, что не позволяет правильно оценивать проведение зарядно-разрядных циклов. Кроме того, вэтом устройстве не предусмотрен вывод из зарядной цепи неисправных аккумуляторов, непригодность которыхвыявляется в процессе циклирования,что может, привести к окончательнойих порче и дополнительным затратамэлектроэнергии при оставлении ихв составе батареи. Целью изобретения является ускорение процесса соединения и вывода аккумуляторов из состава батареи.Поставленная цель достигается тем, что в блоке контроля параметров аккумуляторов в батарее, содержащем изоляционную рейку, на которой закреплены силовые перемычки, позволяющие соединить аккумуляторы в батарею путем...
Устройство для дистанционного управления и контроля двухпозиционных объектов с блоками защиты

Номер патента: 1226568
Опубликовано: 23.04.1986
Авторы: Берзиньш, Волков, Шиманович
МПК: H02J 13/00
Метки: блоками, двухпозиционных, дистанционного, защиты, объектов
...этрм сигнализатор 16.1 отключается,так как диоды 12.1 выносного поста 5.1Ф управления и диод 23.1 приемного блока включены встречно, а сигнализатор 15.1 этого же выносного поста управления включится - диод 10.1 включен согласно с диодом 23.1 приемного блока.Такое состояние сигнализаторов 15.1 и 16.1 указывает на то, что положение переключателя 6. 1 состояния не соответствует состоянию объекта контроля. Нажатием кнопки 17.1 на выносном посте 5.1 управления посылается команда на включение объекта. При этом через обмотку реле 21,1 включения приемного блока 20.1 протекает ток, достаточный для его включения. После включения объекта и переключения его концевых контактов, 30контакт 26.1 разомкнется, а контакт 25.1 замкнется. При этом...
Устройство для формовки керамических блоков, получаемых по выплавляемым моделям

Номер патента: 1324747
Опубликовано: 23.07.1987
Авторы: Аничин, Макаровский, Муравьев, Санников
МПК: B22C 15/10
Метки: блоков, выплавляемым, керамических, моделям, получаемых, формовки
...керамических блоков, используемых для получения литья по выплавляемым моделям.Цель изобретения - увеличение срока службы рольганга за счет исключения на него вибровоздействий.На фиг. 1 изображено устройство, общий вид; на фиг. 2 - то же,вид 10 сверху.Устройство для Формовки керамических блоков состоит из опор 1, на которых установлен рольганг 2, одной стороной рольганг 2 опирается шарниром 15 3 на опору 1, а другой - опирается на шток ч пневмопривода 5. Между роликами б рольганга 2 располагаются стойки 7 вибрационного механизма 8, Для перемещения опок 9 по рольгангу 20 2 между роликами 6 установлена штанга 10, совершающая возвратно-поступательные движения при помощи пневмоцилиндра 11. Над вибрационным столом 8 установлен бункер...
Предыдущий патент: Система адаптивного управления шлифовальным станком
Следующий патент: Система экстремального регулирования электронно-лучевым вентилем
Случайный патент: Способ испытания образцов на механическую прочность при высоких температурах